
About Inverse Laplace Transform of a Dynamic Viscosity Function


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
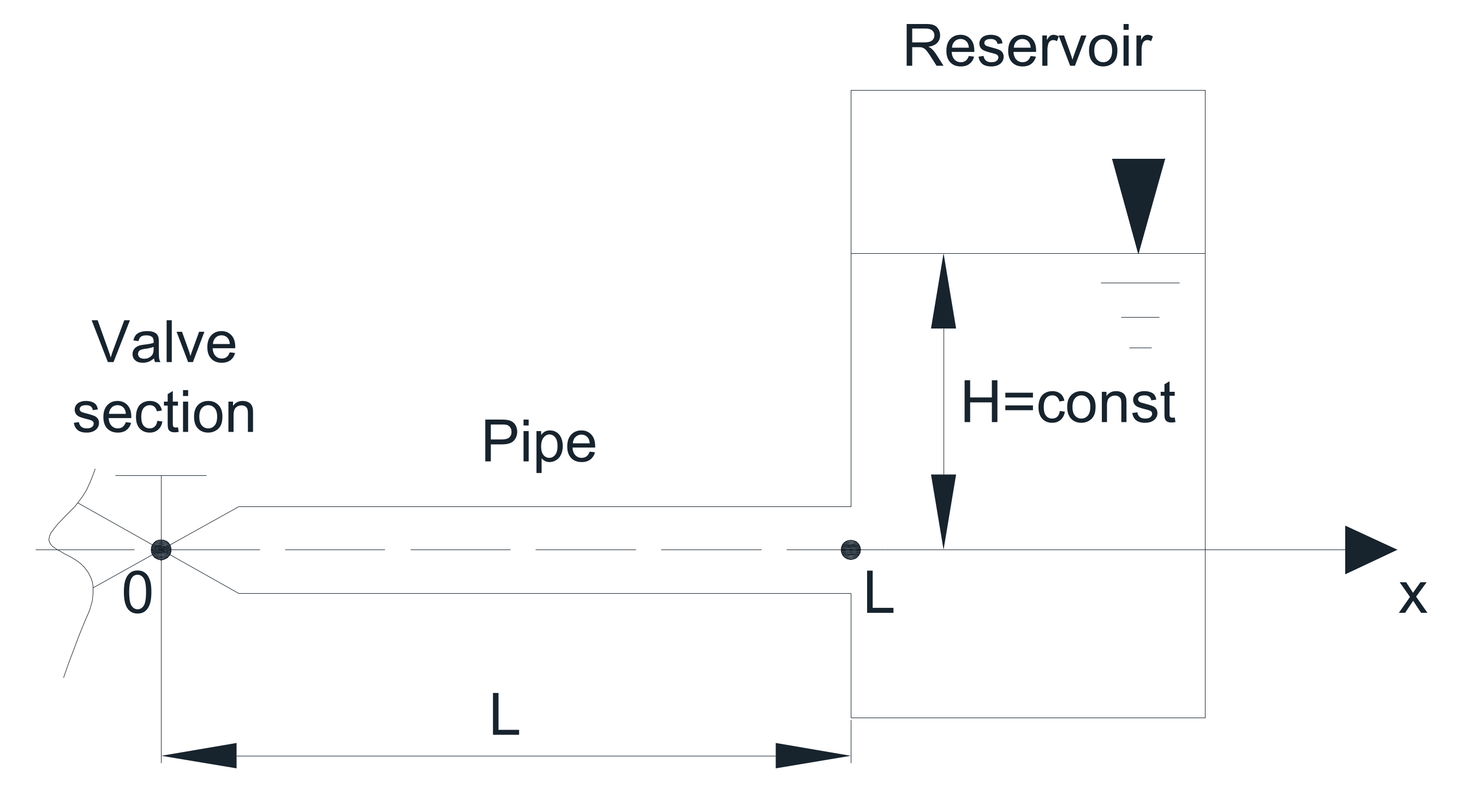
2. Water Hammer Equations
- (a)
- at ;
- (b)
- at (no-slip condition).
3. Solution of Water Hammer Problem in Laplace Domain
4. Novel Method to Calculate the Inverse Laplace Transform of M Function
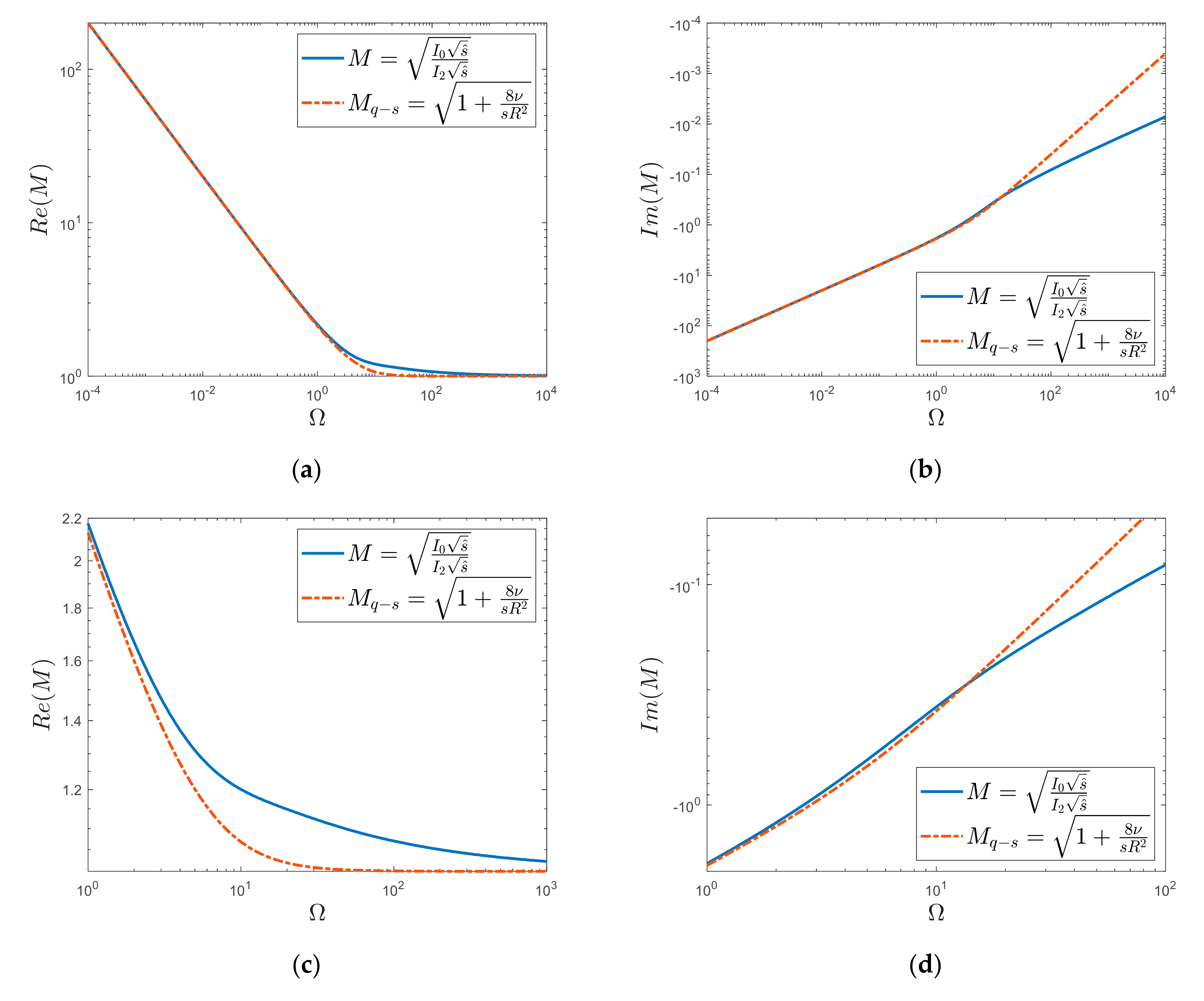
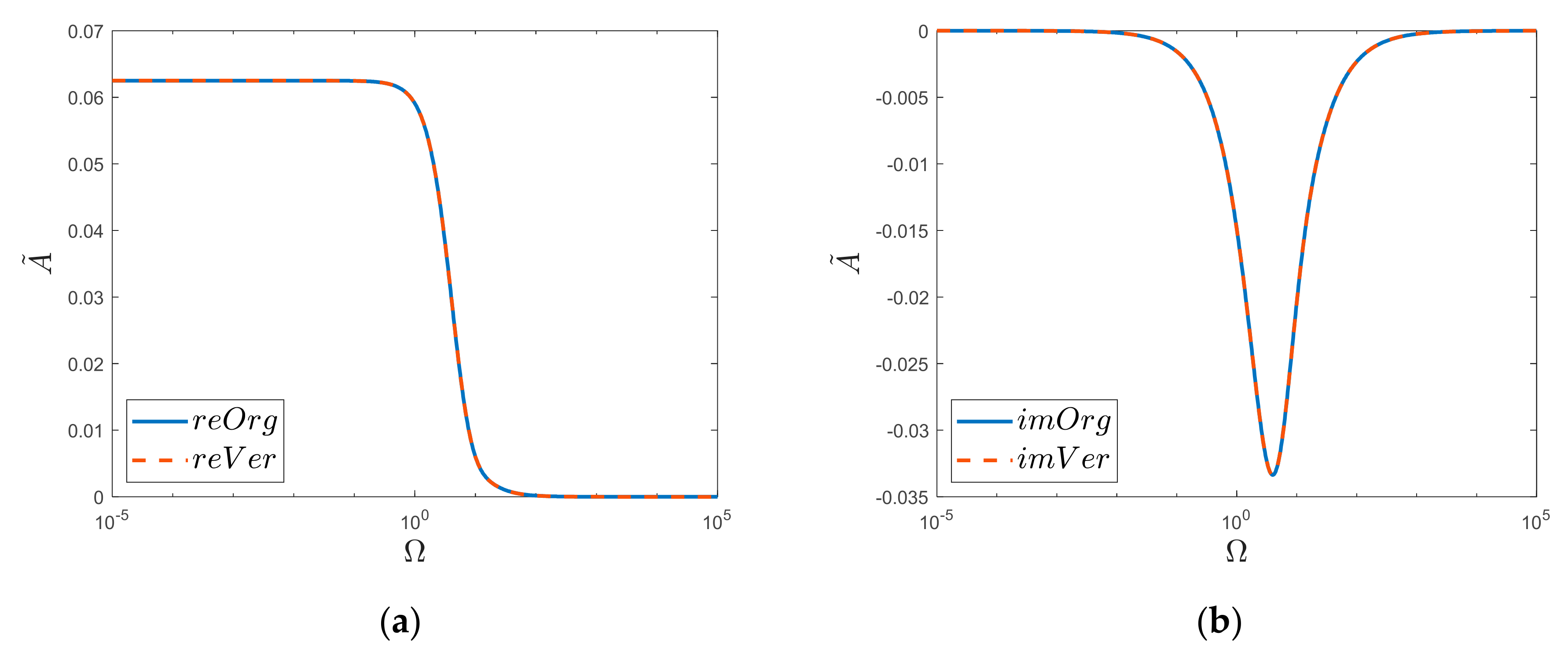
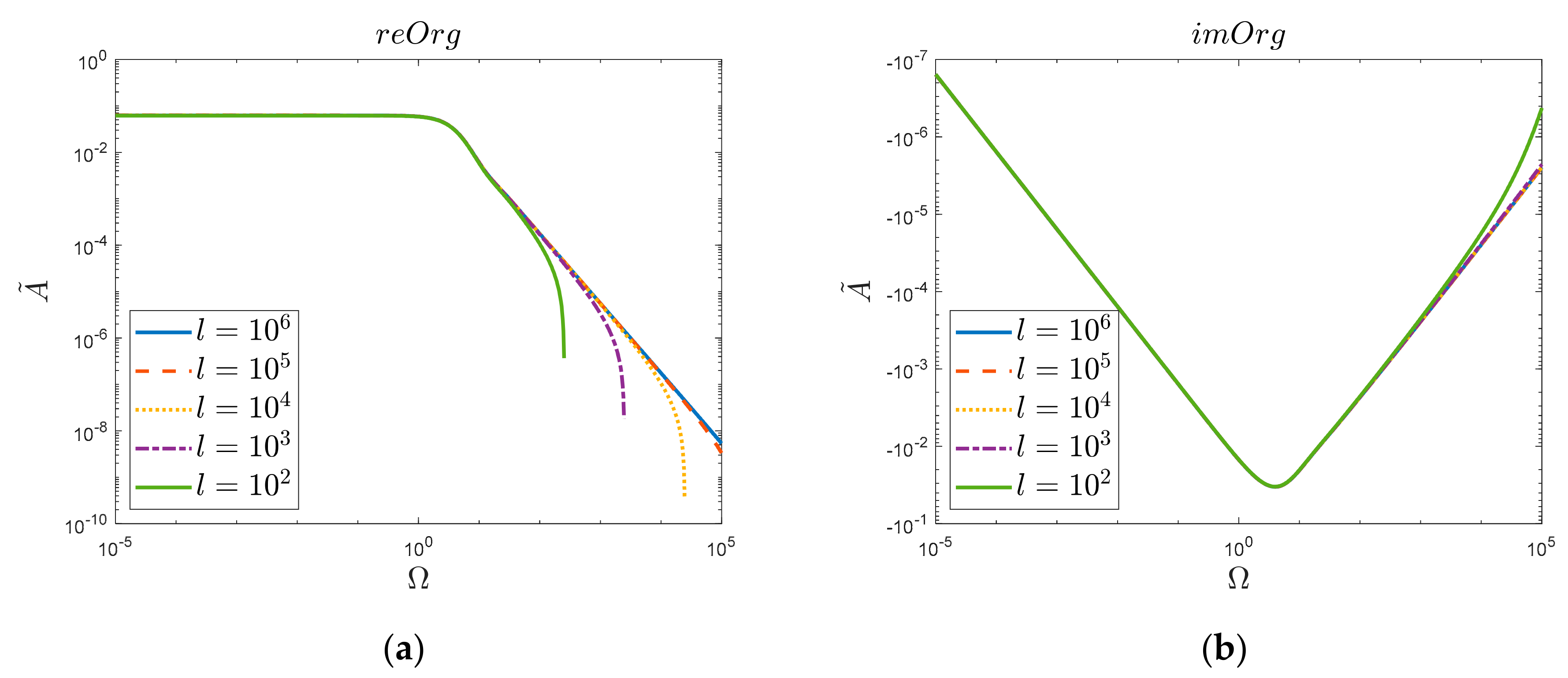
5. Comparison of M Function Transform in Time and Frequency Domain
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| Name | Description | Unit |
| pressure wave speed | (m/s) | |
| Heaviside step function | (-) | |
| unit imaginary number: | (-) | |
| pipe length | (m) | |
| dynamic viscosity function in the time domain | (1/s) | |
| dynamic viscosity function | (-) | |
| average pressure as a function of x and t | (Pa) | |
| axial pressure in cylindrical coordinates—function of x and t | (Pa) | |
| independent variable for radial direction in cylindrical coordinates | (m) | |
| inner pipe radius | (m) | |
| Laplace complex variable | (s−1) | |
| dimensionless Laplace variable | (-) | |
| time | (s) | |
| dimensionless time | (-) | |
| average velocity in cross-section | (m/s) | |
| axial velocity in cylindrical coordinates—function of x, r, and t | (m/s) | |
| initial velocity in pre-transient flow | (m/s) | |
| water hammer number: | (-) | |
| independent variable for axial direction in cylindrical coordinates | (m) | |
| Joukowsky pressure-rise formula: | (Pa) | |
| Dirac delta function | (-) | |
| ηi | consecutive zeros of first-kind Bessel functions of the second order | (-) |
| dynamic viscosity | (Pa∙s) | |
| consecutive zeros of first-kind Bessel functions of the zero order | (-) | |
| kinematic viscosity | (m2/s) | |
| liquid density | (kg/m3) | |
| frequency | (s−1) | |
| gamma function | (-) | |
| dimensionless frequency | (-) |
Appendix A
Appendix B
Appendix C
References
- Wan, W.; Zhang, B.; Chen, X. Investigation on water hammer control of centrifugal pumps in water supply pipeline systems. Energies 2019, 12, 108. [Google Scholar] [CrossRef] [Green Version]
- Pal, S.; Hanmaiahgari, P.R.; Karney, B.W. An overview of the numerical approaches to water hammer modelling: The ongoing quest for practical and accurate numerical approaches. Water 2021, 13, 1597. [Google Scholar] [CrossRef]
- Julian, R.; Dragna, D.; Ollivier, S.; Blanc-Benon, P. Rational approximation of unsteady friction weighting functions in the Laplace domain. J. Hydraul. Eng. 2021, 147, 04021031. [Google Scholar] [CrossRef]
- Urbanowicz, K.; Jing, H.; Bergant, A.; Stosiak, M.; Lubecki, M. Progress in analytical modeling of water hammer. In Proceedings of the ASME 2021, Fluids Engineering Division Summer Meeting, Virtual, 10–12 August 2021; pp. 1–12. [Google Scholar]
- Roiti, A. Sul movimento dei liquidi. Ann. Della Sc. Norm. Super. Pisa–Cl. Sci. 1871, 1, 193–240. (In Italian) [Google Scholar]
- Gromeka, I.S. On a theory of the motion of fluids in narrow cylindrical tubes. Uch. Zap. Kazan. Inst. 1882, 41, 1–12. (In Russian) [Google Scholar]
- Szymański, P. Quelques solutions exactes des équations de l’hydrodynamique du fluide visqueux dans le cas d’un tube cylindrique (in French). J. Math. Pures Appliquées 1932, 11, 67–107. [Google Scholar]
- Andersson, H.I.; Tiseth, K.L. Start-up flow in a pipe following the sudden imposition of a constant flow rate. Chem. Eng. Commun. 1992, 112, 121–133. [Google Scholar] [CrossRef]
- Das, D.; Arakeri, J.H. Transition of unsteady velocity profiles with reverse flow. J. Fluid Mech. 1998, 374, 251–283. [Google Scholar] [CrossRef] [Green Version]
- Gerbes, W. Zur instationären, laminaren Strömung einer inkompressiblen, zähen Flüssigkeit in kreiszylindrischen Rohren. Z. angew. Phys. 1951, 3, 267–271. (In German) [Google Scholar]
- Chambré, P.L.; Schrock, V.E.; Gopalakrishnan, A. Reversal of laminar flow in a circular pipe. Nucl. Eng. Des. 1978, 47, 239–250. [Google Scholar] [CrossRef]
- Uchida, S. The pulsating viscous flow superposed on the steady laminar motion of incompressible fluid in a circular pipe. Z. Angew. Math. Phys. 1956, 7, 403–422. [Google Scholar] [CrossRef]
- Womersley, J.R. Method for the calculation of velocity, rate of flow and viscous drag in arteries when the pressure gradient is known. J. Physiol. 1955, 127, 553–563. [Google Scholar] [CrossRef] [PubMed]
- Ito, H. Theory of laminar flow through a pipe with non-steady pressure gradients. Trans. Jpn. Soc. Mech. Eng. 1953, 18, 101–108. [Google Scholar] [CrossRef] [Green Version]
- Hershey, D.; Song, G. Friction factors and pressure drop sinusoidal laminar flow of water for and blood in rigid tubes. AlChE J. 1967, 13, 491–496. [Google Scholar] [CrossRef]
- Jayasinghe, D.A.P.; Leutheusser, H.J. Pulsatile waterhammer subject to laminar friction. J. Basic Eng. 1972, 94, 467–472. [Google Scholar] [CrossRef]
- Gerlach, C.R.; Parker, J.D. Wave propagation in viscous fluid lines including higher mode effects. J. Basic Eng. 1967, 89, 782–788. [Google Scholar] [CrossRef]
- Letelier, M.F.S.; Leutheusser, H.J. Unified approach to the solution of problems of unsteady laminar flow in long pipes. J. Appl. Mech. 1983, 50, 8–12. [Google Scholar] [CrossRef]
- Xiu, W.; Sun, J.G.; Sha, W.T. Transient flows and pressure waves in pipes. J. Hydrodyn. Ser. B 1995, 2, 51–59. [Google Scholar]
- Vardy, A.E.; Brown, J.M.B. Laminar pipe flow with time-dependent viscosity. J. Hydroinform. 2011, 13, 729–740. [Google Scholar] [CrossRef] [Green Version]
- Daprà, I.; Scarpi, G. Unsteady flow of fluids with arbitrarily time-dependent rheological behavior. J. Fluids Eng. 2017, 139, 051202. [Google Scholar] [CrossRef]
- García García, F.J.; Alvariño, P.F. On an analytic solution for general unsteady/transient turbulent pipe flow and starting turbulent flow. Eur. J. Mech./B Fluids 2019, 74, 200–210. [Google Scholar] [CrossRef]
- García García, F.J.; Alvariño, P.F. On an analytical explanation of the phenomena observed in accelerated turbulent pipe flow. J. Fluid Mech. 2019, 881, 420–461. [Google Scholar] [CrossRef]
- Joukowsky, N. Über den hydraulischen Stoss in Wasserleitungsröhren. In Memoires de L’academie Imperiale des Sciences de St.-Petersbourg; J. Glasounof: Saint-Pétersbourg, Russia, 1900; Volume 9, pp. 1–71. [Google Scholar]
- Allievi, L. Teoria generale del moto perturbato dell’acqua nei tubi in pressione (colpo d’ariete). Ann. Della Soc. Degli Ing. Ed Archit. Ital. 1902, 17, 285–325. [Google Scholar]
- Wood, F.M. The application of Heaviside’s operational calculus to the solution of problems in water hammer. Trans. ASME 1937, 59, 707–713. [Google Scholar]
- Rich, G.R. Water hammer analysis in the Laplace-Mellin transformation. Trans. ASME 1945, 67, 361–376. [Google Scholar]
- Iberall, A.S. Attenuation of oscillatory pressures in instrument lines. J. Res. Natl Bur. Stand. 1950, 45, 85–108. [Google Scholar] [CrossRef]
- Schuder, C.B.; Binder, R.C. The response of pneumatic transmission lines to step inputs. J. Basic Eng. 1959, 81, 578–583. [Google Scholar] [CrossRef]
- Ezekiel, F.D.; Paynter, H.M. Firmoviscous and Anelastic Properties of Fluids and Their Effects on the Propagation of Compression Waves; American Society of Mechanical Engineers (ASME): New York, NY, USA, 1959. [Google Scholar]
- Landauer, R. Shock waves in nonlinear transmission lines and their effect on parametric amplification. IBM J. Res. Dev. 1960, 4, 391–401. [Google Scholar] [CrossRef]
- Brown, F.T. The transient response of fluid lines. J. Fluids Eng. 1962, 84, 547–553. [Google Scholar] [CrossRef]
- Holmboe, E.L. Viscous Distortion in Wave Propagation as Applied to Waterhammer and Short Pulses. Doctoral Thesis, Carnegie Institute of Technology, Pittsburgh, PA, USA, 1964. [Google Scholar]
- Holmboe, E.L.; Rouleau, W.T. The effect of viscous shear on transients in liquid lines. J. Basic Eng. 1967, 89, 174–180. [Google Scholar] [CrossRef]
- Zielke, W. Frequency-Dependent Friction in Transient Pipe Flow. Doctoral Thesis, University of Michigan, Ann Arbor, MI, USA, 1966. [Google Scholar]
- Zielke, W. Frequency-dependent friction in transient pipe flow. J. Basic Eng. 1968, 90, 109–115. [Google Scholar] [CrossRef]
- Karam, J.T. A simple but complete solution for the step response of a semi-infinite, Circular Fluid Transmission Line. J. Basic Eng. 1972, 94, 455–456. [Google Scholar] [CrossRef]
- Karam, J.T.; Leonard, R.G. A simple yet theoretically based time domain model for fluid transmission line systems. J. Fluids Eng. 1973, 95, 498–504. [Google Scholar] [CrossRef]
- Muto, T.; Takahashi, K. Transient responses of fluid lines (Step responses of single pipeline and series pipelines). Bull. JSME 1985, 28, 2325–2331. [Google Scholar] [CrossRef] [Green Version]
- Urbanowicz, K.; Bergant, A.; Stosiak, M.; Lubecki, M. Analytical solutions of water hammer in metal pipes. Part I—Brief theoretical study. In Fatigue and Fracture of Materials and Structures; Structural Integrity Series; Lesiuk, G., Duda, S., Correia, J.A.F.O., De Jesus, A.M.P., Eds.; Springer: Cham, Switzerland, 2022; Volume 24, pp. 57–68. [Google Scholar] [CrossRef]
- Urbanowicz, K.; Bergant, A.; Stosiak, M.; Towarnicki, K. Analytical solutions of water hammer in metal pipes. Part II—Comparative study. In Fatigue and Fracture of Materials and Structures; Structural Integrity Series; Lesiuk, G., Duda, S., Correia, J.A.F.O., De Jesus, A.M.P., Eds.; Springer: Cham, Switzerland, 2022; Volume 24, pp. 69–83. [Google Scholar] [CrossRef]
- Urbanowicz, K.; Bergant, A.; Karadzić, U.; Jing, H.; Kodura, A. Numerical investigation of the cavitating flow for constant water hammer number. J. Phys. Conf. Ser. 2021, 1736, 012040. [Google Scholar] [CrossRef]
- Sobey, R.J. Analytical solutions for unsteady pipe flow. J. Hydroinform. 2004, 6, 187–207. [Google Scholar] [CrossRef]
- Mei, C.C.; Jing, H. Pressure and wall shear stress in blood hammer—Analytical theory. Math. Biosci. 2016, 280, 62–70. [Google Scholar] [CrossRef] [PubMed]
- Mei, C.C.; Jing, H. Effects of thin plaque on blood hammer—An asymptotic theory. Eur. J. Mech./B Fluids 2018, 69, 62–75. [Google Scholar] [CrossRef]
- Chandrali, B.; Veeresha, P. Laguerre polynomial-based operational matrix of integration for solving fractional differential equations with non-singular kernel. Proc. R. Soc. A Math. Phys. Eng. Sci. 2021, 477, 20210438. [Google Scholar]
- Akinyemi, L.; Akpan, U.; Veeresha, P.; Rezazadeh, H.; Inc, M. Computational techniques to study the dynamics of generalized unstable nonlinear Schrödinger equation. J. Ocean Eng. Sci. 2022. [Google Scholar] [CrossRef]
- Nazir, U.; Abu-Hamdeh, N.H.; Nawaz, M.; Obaid Alharbi, S.; Khan, W. Numerical study of thermal and mass enhancement in the flow of Carreau-Yasuda fluid with hybrid nanoparticles. Case Stud. Therm. Eng. 2021, 27, 101256. [Google Scholar] [CrossRef]
- Nazir, U.; Saleem, S.; Al-Zubaidi, A.; Shahzadi, I.; Feroz, N. Thermal and mass species transportation in tri-hybridized Sisko martial with heat source over vertical heated cylinder. Int. Commun. Heat Mass Transf. 2022, 134, 106003. [Google Scholar] [CrossRef]
- Nazir, U.; Sohail, M.; Bilal Hafeez, M.; Krawczuk, M.; Askar, S.; Wasif, S. An inclination in Thermal Energy Using Nanoparticles with Casson Liquid Past an Expanding Porous Surface. Energies 2021, 14, 7328. [Google Scholar] [CrossRef]
- Sohail, M.; Nazir, U.; Chub, Y.M.; Al-Kouzd, W.; Thounthong, P. Bioconvection phenomenon for the boundary layer flow of magnetohydrodynamic Carreau liquid over a heated disk. Sci. Iran. 2021, 28, 1896–1907. [Google Scholar]
- Oldenburger, R.; Goodson, R.E. Simplification of hydraulic line dynamics by use of infinite products. J. Basic Eng. 1964, 86, 1–8. [Google Scholar] [CrossRef]
- Brown, F.T. A unified approach to the analysis of uniform one-dimensional distributed systems. J. Basic Eng. 1967, 89, 423–432. [Google Scholar] [CrossRef]
- Viersma, T.J. Analysis, Synthesis and Design of Hydraulic Servosystems and Pipelines; Elsevier: Amsterdam, The Netherlands, 1980. [Google Scholar]
- Ham, A.A. On the Dynamics of Hydraulic Lines Supplying Servosystems. Doctoral Thesis, TU Delft, Delft, The Netherlands, 1982. [Google Scholar]
- Hullender, D.A. Alternative approach for modeling transients in smooth pipe with low turbulent flow. J. Fluids Eng. 2016, 138, 12120243. [Google Scholar] [CrossRef]
- Johnston, N.; Pan, M.; Kudźma, S. An enhanced transmission line method for modelling laminar flow of liquid in pipelines. Proc. IMechE Part I J. Syst. Control Eng. 2014, 228, 193–206. [Google Scholar] [CrossRef] [Green Version]
- Krus, P. Dynamic models for transmission lines and hoses. In Proceedings of the XVII International Symposium on Dynamic Problems of Mechanics, Sao Sebastiao, Brazil, 5–10 March 2017. [Google Scholar]
- Manhartsgruber, B. A reference model for modal approximations of linear transmission line dynamics. IFAC-PapersOnLine 2015, 48, 441–446. [Google Scholar] [CrossRef]
- Calogero, F. On the zeros of Bessel functions. Lett. Nuovo Cim. 1977, 20, 254–256. [Google Scholar] [CrossRef]
- Calogero, F. On the zeros of Bessel functions II. Lett. Nuovo Cim. 1977, 20, 476–478. [Google Scholar] [CrossRef]
- Ahmed, S.; Calogero, F. On the zeros of Bessel functions IV. Lett. Nuovo Cim. 1978, 21, 531–534. [Google Scholar] [CrossRef]
- Brereton, G.J.; Jiang, Y. Exact solutions for some fully developed laminar pipe flows undergoing arbitrary unsteadiness. Phys. Fluids 2005, 17, 118104. [Google Scholar] [CrossRef]
- Trikha, A.K. An efficient method for simulating frequency–dependent friction in transient liquid flow. J. Fluids Eng. 1975, 97, 97–105. [Google Scholar] [CrossRef]
- Kagawa, T.; Lee, I.; Kitagawa, A.; Takenaka, T. High speed and accurate computing method of frequency–dependent friction in laminar pipe flow for characteristics method. Trans. Jpn. Soc. Mech. Eng. 1983, 49, 2638–2644. (In Japanese) [Google Scholar] [CrossRef]
- Schohl, G.A. Improved approximate method for simulating frequency-dependent friction in transient laminar flow. J. Fluids Eng. 1993, 115, 420–424. [Google Scholar] [CrossRef]
- Vítkovský, P.; Lambert, M.; Simpson, A.; Bergant, A. Advances in unsteady friction modeling in transient pipe flow. In Proceedings of the 8th International Conference on Pressure Surges, Hague, The Netherlands, 12–14 April 2000; pp. 471–482. [Google Scholar]
- Urbanowicz, K. Fast and accurate modelling of frictional transient pipe flow. Z. Angew. Math. Mech. 2018, 98, 802–823. [Google Scholar] [CrossRef]
- Yang, W.C.; Tobler, W.E. Dissipative modal approximation of fluid transmission lines using linear friction model. J. Dyn. Syst. Meas. Control 1991, 113, 152–162. [Google Scholar] [CrossRef]
- Afanasiev, G.N. Closed Expressions for Some Useful integrals Involving Legendre Functions and Sum Rules for Zeroes of Bessel Functions. J. Comput. Phys. 1989, 85, 245–252. [Google Scholar] [CrossRef]
- Baricz, Á.; Jankov Maširević, D.; Pogány, T.K.; Szász, R. On an identity for zeros of Bessel functions. J. Math. Anal. Appl. 2015, 422, 27–36. [Google Scholar] [CrossRef]
- Ciaurri, Ó.; Durán, A.J.; Pérez, M.; Varona, J.L. Bernoulli–Dunkl and Apostol–Euler–Dunkl polynomials with applications to series involving zeros of Bessel functions. J. Approx. Theory 2018, 235, 20–45. [Google Scholar] [CrossRef] [Green Version]
- Pedersen, T.G. Sum rules for zeros and intersections of Bessel functions from quantum mechanical perturbation theory. Phys. Lett. A 2018, 382, 1837–1841. [Google Scholar] [CrossRef]
- Abramowitz, M.; Stegun, I.A. Handbook of Mathematical Functions: With Formulas, Graphs, and Mathematical Tables; Dover Books on Mathematics: New York, NY, USA, 1970. [Google Scholar]
- Brown, F.T.; Nelson, S.E. Step responses of liquid lines with frequency-dependent effects of viscosity. J. Fluids Eng. 1965, 87, 504–510. [Google Scholar] [CrossRef]
- Koyunbakan, H. The transmutation method and Schrödinger equation with perturbed exactly solvable potential. J. Comput. Acoust. 2009, 17, 1–10. [Google Scholar] [CrossRef]
- Okposo, N.I.; Veeresha, P.; Okposo, E.N. Solutions for time-fractional coupled nonlinear Schrödinger equations arising in optical solitons. Chin. J. Phys. 2022, 77, 965–984. [Google Scholar] [CrossRef]
- Veeresha, P.; Baleanu, D. A unifying computational framework for fractional Gross–Pitaevskii equations. Phys. Scr. 2021, 96, 125010. [Google Scholar]
- Nazir, U.; Saleem, S.; Nawaz, M.; Adil Sadiq, M.; Alderremy, A.A. Study of transport phenomenon in Carreau fluid using Cattaneo–Christov heat flux model with temperature dependent diffusion coefficients. Phys. A Stat. Mech. Appl. 2020, 554, 123921. [Google Scholar] [CrossRef]
- Doetsch, G. Introduction to the Theory and Application of the Laplace Transformation; Springer: Berlin/Heidelberg, Germany, 1974. [Google Scholar]










Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Urbanowicz, K.; Bergant, A.; Grzejda, R.; Stosiak, M. About Inverse Laplace Transform of a Dynamic Viscosity Function. Materials 2022, 15, 4364. https://doi.org/10.3390/ma15124364
Urbanowicz K, Bergant A, Grzejda R, Stosiak M. About Inverse Laplace Transform of a Dynamic Viscosity Function. Materials. 2022; 15(12):4364. https://doi.org/10.3390/ma15124364
Chicago/Turabian StyleUrbanowicz, Kamil, Anton Bergant, Rafał Grzejda, and Michał Stosiak. 2022. "About Inverse Laplace Transform of a Dynamic Viscosity Function" Materials 15, no. 12: 4364. https://doi.org/10.3390/ma15124364