
Lamb Wave Based Structural Damage Detection Using Stationarity Tests



Abstract
:1. Introduction
2. Background
2.1. Basic Concepts
- Trends () representing long term movements in the mean;
- Seasonal effects () and cycles () representing cyclical fluctuations in the series;
- Residuals () representing random or systematic fluctuations.
2.2. Time Series and Stationarity
- For , we have a stationary time series, which appears jagged but always oscillates around the mean, as illustrated in Figure 1;
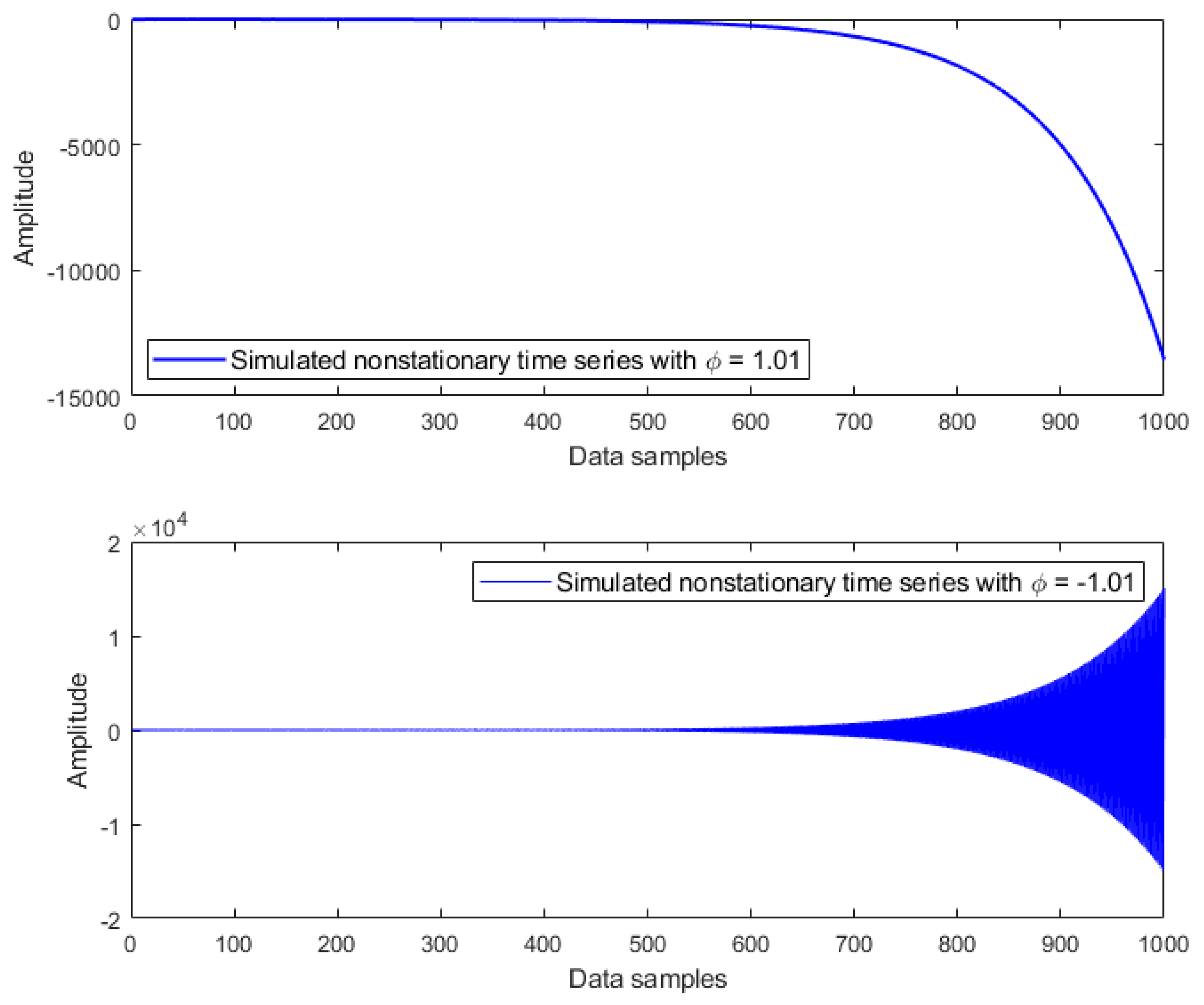
- For , we have a nonstationary time series, which is smoother and finally explodes, as shown in Figure 2;
- For , we have a random walk time series, which moves up and down; it behaves as a nonstationary time series but slowly, as plotted in Figure 3.
2.3. Unit Root Tests
- If , then , where is a white noise process, and so is a nonstationary random walk time series with a drift that contains a stochastic trend or a unit root (which is represented by the integrated sum ). In this case, shocks have permanent effects, and the time series shows an unpredictable pattern (see Figure 4). It is noted that process in this case is referred to as difference stationary, which is discussed in Section 2.2.
- If , then is a stationary time series around the deterministic linear trend . In this case, shocks have transitory effects, as illustrated in Figure 5. The process in this case is referred to as trend stationary, which is mentioned in Section 2.2.
- If the absolute value of the calculated test statistic is greater than the critical value (in absolute value), then can be rejected (i.e., the time series is stationary).
- If the absolute value of the calculated test statistic is smaller than the critical value (in absolute value), then cannot be rejected (i.e., the time series is nonstationary).
2.4. Common Unit Root (or Stationarity) Tests
- (a)
- Augmented Dickey–Fuller (ADF) test for a unit root
- (b)
- Phillips–Perron (PP) test for a unit root
- (c)
- Kwiatkowski–Phillips–Schmidt–Shin (KPSS) test for stationarity
- (d)
- Leybourne–McCabe (LM) test for stationarity
3. Lamb Wave Based Structural Damage Detection Using Unit Root (or Stationarity) Tests
4. Lamb Wave Experimental Data Contaminated by Varying Temperature
5. Results and Discussion
6. Conclusions
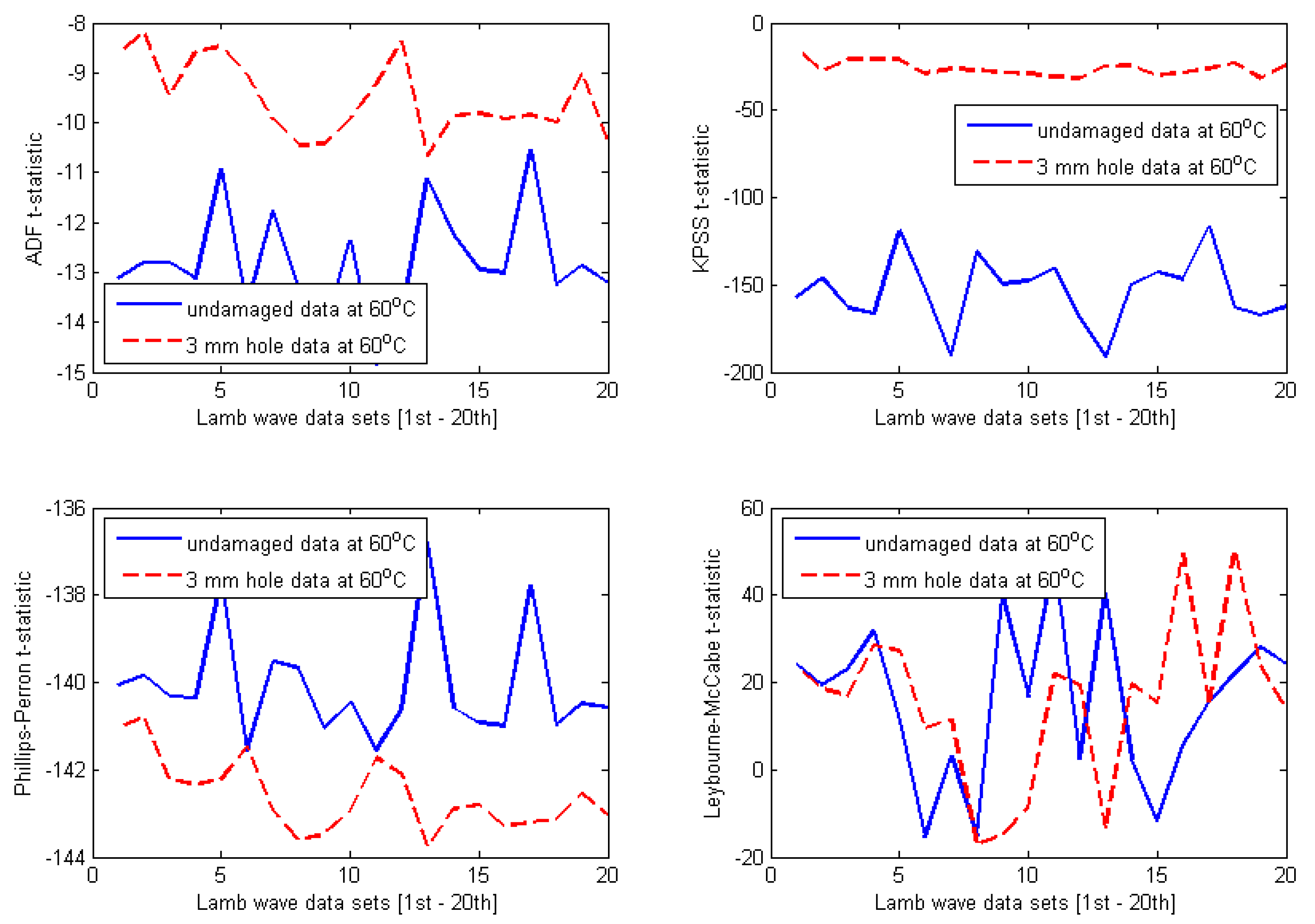
- Both ADF and KPSS tests can detect the damage, while both PP and LM tests are not significant for identifying the damage.
- The ADF test is more stable with the temperature changes than KPSS test. However, the KPSS test can detect damage better than the ADF test.
- Both KPSS and ADF tests can consistently detect damage in the conditions of temperatures varying below 60 °C. However, their t-statistics fluctuate more (or less homogeneous) for temperatures higher than 65 °C.
- Based on these results, both ADF and KPSS tests are suggested to be used together for Lamb wave based structural damage detection in order to enhance the accuracy and reliability of the proposed stationarity-based approach.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Farrar, C.R.; Worden, K. An introduction to structural health monitoring. Phil. Trans. R. Soc. A 2007, 365, 303–315. [Google Scholar] [CrossRef]
- Cawley, P. Structural health monitoring: Closing the gap between research and industrial deployment. Struct. Health Monit. 2018, 17, 1225–1244. [Google Scholar] [CrossRef] [Green Version]
- Kessler, S.S.; Spearing, S.M.; Soutis, C. Damage detection in composite materials using Lamb wave methods. Smart Mater. Struct. 2002, 11, 269–278. [Google Scholar] [CrossRef] [Green Version]
- Lee, S.E.; Hong, J.W. Detection of micro-cracks in metals using modulation of PZT-induced Lamb waves. Materials 2020, 13, 3823. [Google Scholar] [CrossRef]
- Raghavan, A.; Carlos, C.E.S. Review of guided-wave structural health monitoring. Shock. Vib. Dig. 2007, 39, 91–114. [Google Scholar] [CrossRef]
- Zielińska, M.; Rucka, M. Imaging of increasing damage in steel plates using Lamb waves and ultrasound computed tomography. Materials 2021, 14, 5114. [Google Scholar] [CrossRef] [PubMed]
- Xu, C.; Wang, J.; Yin, S.; Deng, M. A focusing MUSIC algorithm for baseline-free Lamb wave damage localization. Mech. Syst. Signal Process. 2022, 164, 108242. [Google Scholar] [CrossRef]
- Dao, P.B.; Staszewski, W.J. Cointegration approach for temperature effect compensation in Lamb wave based damage detection. Smart Mater. Struct. 2013, 22, 095002. [Google Scholar] [CrossRef]
- Zima, B.; Kędra, R. Numerical study of concrete mesostructure effect on Lamb wave propagation. Materials 2020, 13, 2570. [Google Scholar] [CrossRef]
- Salmanpour, M.S.; Sharif Khodaei, Z.; Aliabadi, M.H. Guided wave temperature correction methods in structural health monitoring. J. Intell. Mater. Syst. 2017, 28, 604–618. [Google Scholar] [CrossRef] [Green Version]
- Asokkumar, A.; Jasiūnienė, E.; Raišutis, R.; Kažys, R.J. Comparison of ultrasonic non-contact air-coupled techniques for characterization of impact-type defects in pultruded GFRP composites. Materials 2021, 14, 1058. [Google Scholar] [CrossRef]
- Yin, Z.; Tie, Y.; Duan, Y.; Li, C. Optimization of nonlinear Lamb wave detection system parameters in CFRP laminates. Materials 2021, 14, 3186. [Google Scholar] [CrossRef]
- Li, F.; Meng, G.; Ye, L.; Lu, Y.; Kageyama, K. Dispersion analysis of Lamb waves and damage detection for aluminum structures using ridge in the time-scale domain. Meas. Sci. Technol. 2009, 20, 095704. [Google Scholar] [CrossRef]
- Mitra, M.; Gopalakrishnan, S. Guided wave based structural health monitoring: A review. Smart Mater. Struct. 2016, 25, 053001. [Google Scholar] [CrossRef]
- Pandey, P.; Rai, A.; Mitra, M. Explainable 1-D convolutional neural network for damage detection using Lamb wave. Mech. Syst. Signal Process. 2022, 164, 108220. [Google Scholar] [CrossRef]
- Worden, K.; Iakovidis, I.; Cross, E.J. On stationarity and the interpretation of the ADF statistic. In Dynamics of Civil Structures, Volume 2. Conference Proceedings of the Society for Experimental Mechanics Series; Pakzad, S., Ed.; Springer: Cham, Germany, 2019; pp. 29–38. [Google Scholar]
- Worden, K.; Iakovidis, I.; Cross, E.J. New results for the ADF statistic in nonstationary signal analysis with a view towards structural health monitoring. Mech. Syst. Signal Process. 2021, 146, 106979. [Google Scholar] [CrossRef]
- Maddala, G.; Kim, I. Unit Roots, Cointegration, and Structural Change; Cambridge University Press: Cambridge, UK, 1998; p. 505. [Google Scholar]
- Zivot, E.; Wang, J. Modeling Financial Time Series with S-PLUS, 2nd ed.; Springer: New York, NY, USA, 2006. [Google Scholar]
- Tsay, R.S. Analysis of Financial Time Series, (Vol. Wiley Series in Probability and Statistics), 2nd ed.; Wiley Interscience: New York, NY, USA, 2005; p. 576. [Google Scholar]
- Dickey, D.A.; Fuller, W.A. Distribution of the estimators for autoregressive time series with a unit root. J. Am. Stat. Assoc. 1979, 74, 427–431. [Google Scholar]
- Dickey, D.A.; Fuller, W.A. Likelihood ratio statistics for autoregressive time series with a unit root. Econometrica 1981, 49, 1057–1072. [Google Scholar] [CrossRef]
- Phillips, P.C.B.; Perron, P. Testing for a unit root in time series regression. Biometrika 1988, 75, 335–346. [Google Scholar] [CrossRef]
- Kwiatkowski, D.; Phillips, P.C.B.; Schmidt, P.; Shin, Y. Testing the null hypothesis of stationarity against the alternative of a unit root. J. Econom. 1992, 54, 159–178. [Google Scholar] [CrossRef]
- Leybourne, S.J.; McCabe, B.P.M. A consistent test for a unit root. J. Bus. Econ. Stat. 1994, 12, 157–166. [Google Scholar]
- Leybourne, S.J.; McCabe, B.P.M. Modified stationarity tests with data-dependent model-selection rules. J. Bus. Econ. Stat. 1999, 17, 264–270. [Google Scholar]
- Dao, P.B. Cointegration method for temperature effect removal in damage detection based on Lamb waves. Diagnostyka 2013, 14, 61–67. [Google Scholar]
- Dao, P.B.; Staszewski, W.J. Data normalisation for Lamb wave–based damage detection using cointegration: A case study with single- and multiple-temperature trends. J. Intell. Mater. Syst. Struct. 2014, 25, 845–857. [Google Scholar] [CrossRef]
- Worden, K.; Baldacchino, T.; Rowson, J.; Cross, E.J. Some recent developments in SHM based on nonstationary time series analysis. Proc. IEEE 2016, 104, 1589–1603. [Google Scholar] [CrossRef] [Green Version]
- Dao, P.B.; Klepka, A.; Pieczonka, L.; Aymerich, F.; Staszewski, W.J. Impact damage detection in smart composites using nonlinear acoustics—Cointegration analysis for removal of undesired load effect. Smart Mater. Struct. 2017, 26, 035012. [Google Scholar] [CrossRef]
- Dao, P.B.; Staszewski, W.J.; Klepka, A. Stationarity-based approach for the selection of lag length in cointegration analysis used for structural damage detection. Comput. Aided Civ. Infrastruct. Eng. 2017, 32, 138–153. [Google Scholar] [CrossRef]
- Engle, R.F.; Granger, C.W.J. Cointegration and error-correction: Representation, estimation and testing. Econometrica 1987, 55, 251–276. [Google Scholar] [CrossRef]
- Johansen, S. Statistical analysis of cointegration vectors. J. Econ. Dyn. Control. 1988, 12, 231–254. [Google Scholar] [CrossRef]
- The MathWorks Inc. Econometrics ToolboxTM.; Release 2019b; The MathWorks Inc.: Natick, MA, USA, 2019. [Google Scholar]
- Lee, B.C.; Manson, G.; Staszewski, W.J. Environmental effects on lamb wave responses from piezoceramic sensors. Mater. Sci. Forum 2003, 440–441, 195–202. [Google Scholar] [CrossRef]
- Mariani, S.; Heinlein, S.; Cawley, P. Location specific temperature compensation of guided wave signals in structural health monitoring. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2020, 67, 146–157. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gorgin, R.; Luo, Y.; Wu, Z. Environmental and operational conditions effects on Lamb wave based structural health monitoring systems: A review. Ultrasonics 2020, 105, 106114. [Google Scholar] [CrossRef] [PubMed]
- Lee, B.C.; Staszewski, W.J. Lamb wave propagation modelling for damage detection: I. Two-dimensional analysis. Smart Mater. Struct. 2007, 16, 249–259. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type of Tests | Data at 35 °C | Data at 45 °C | Data at 60 °C | Data at 70 °C |
|---|---|---|---|---|
| ADF test | 2.81 | 3.83 | 3.28 | 4.42 |
| KPSS test | 88.43 | 118.21 | 127.62 | 31.63 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dao, P.B.; Staszewski, W.J. Lamb Wave Based Structural Damage Detection Using Stationarity Tests. Materials 2021, 14, 6823. https://doi.org/10.3390/ma14226823
Dao PB, Staszewski WJ. Lamb Wave Based Structural Damage Detection Using Stationarity Tests. Materials. 2021; 14(22):6823. https://doi.org/10.3390/ma14226823
Chicago/Turabian StyleDao, Phong B., and Wieslaw J. Staszewski. 2021. "Lamb Wave Based Structural Damage Detection Using Stationarity Tests" Materials 14, no. 22: 6823. https://doi.org/10.3390/ma14226823