
Dislocation Topological Evolution and Energy Analysis in Misfit Hardening of Spherical Precipitate by the Parametric Dislocation Dynamics Simulation



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
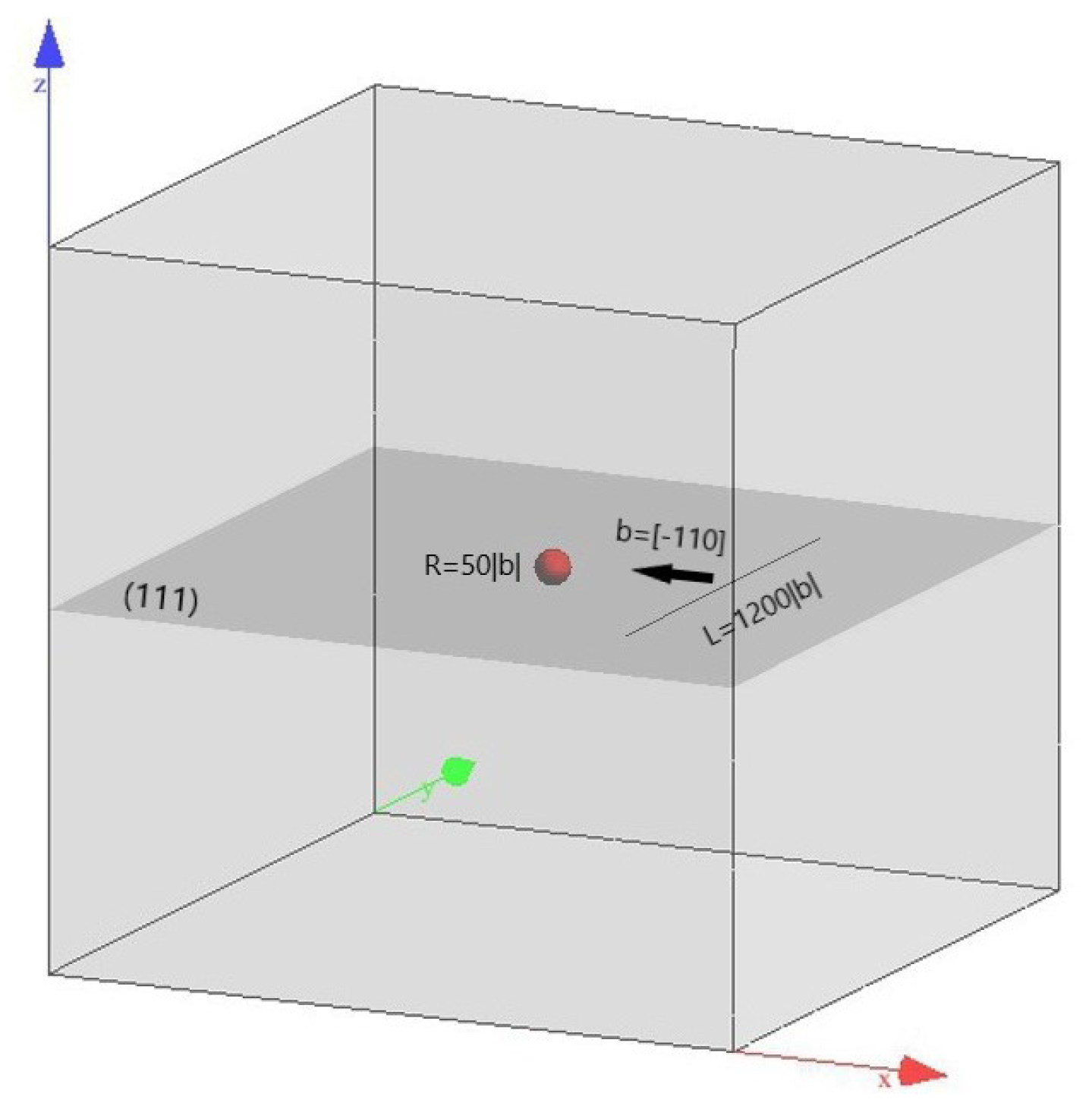
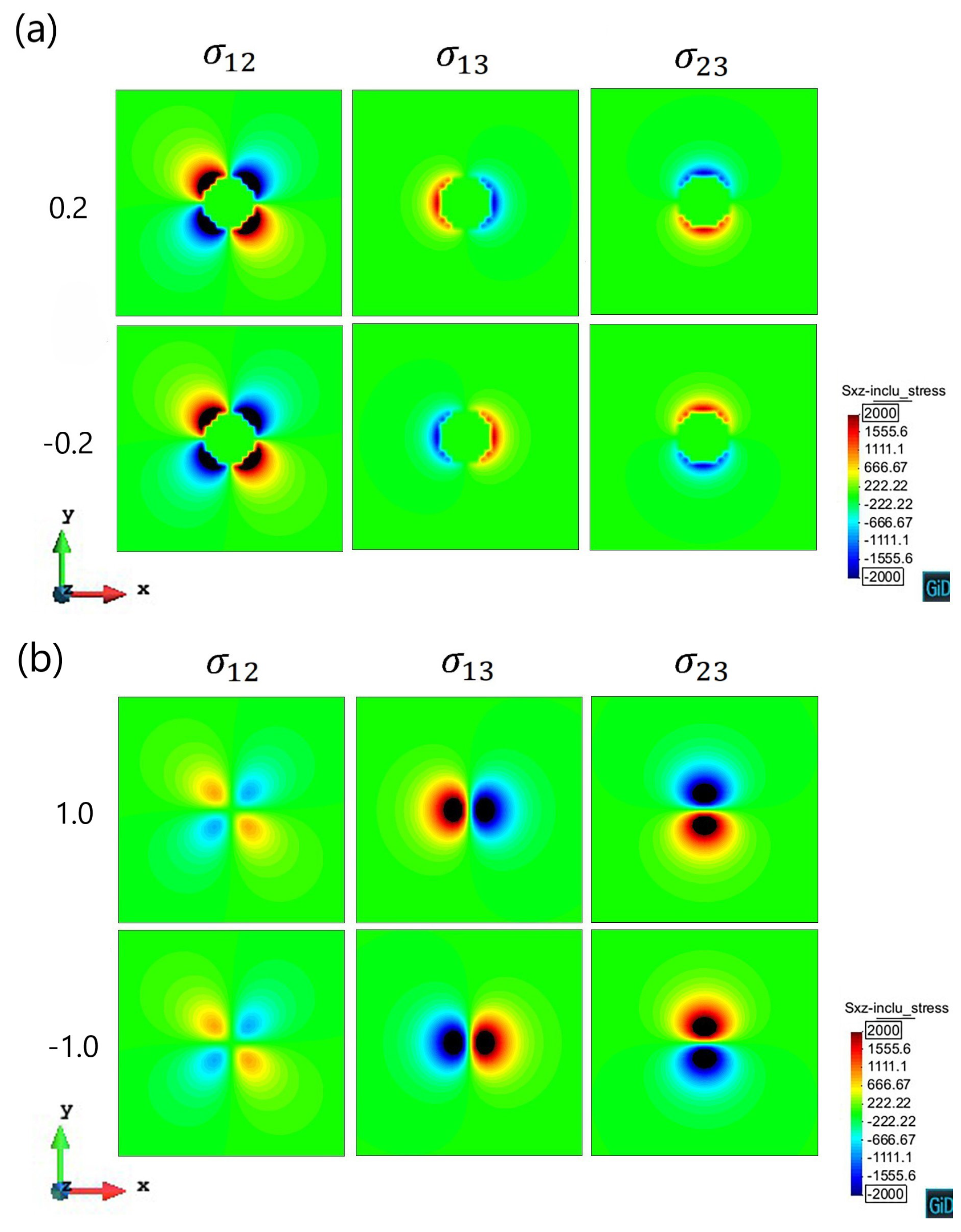
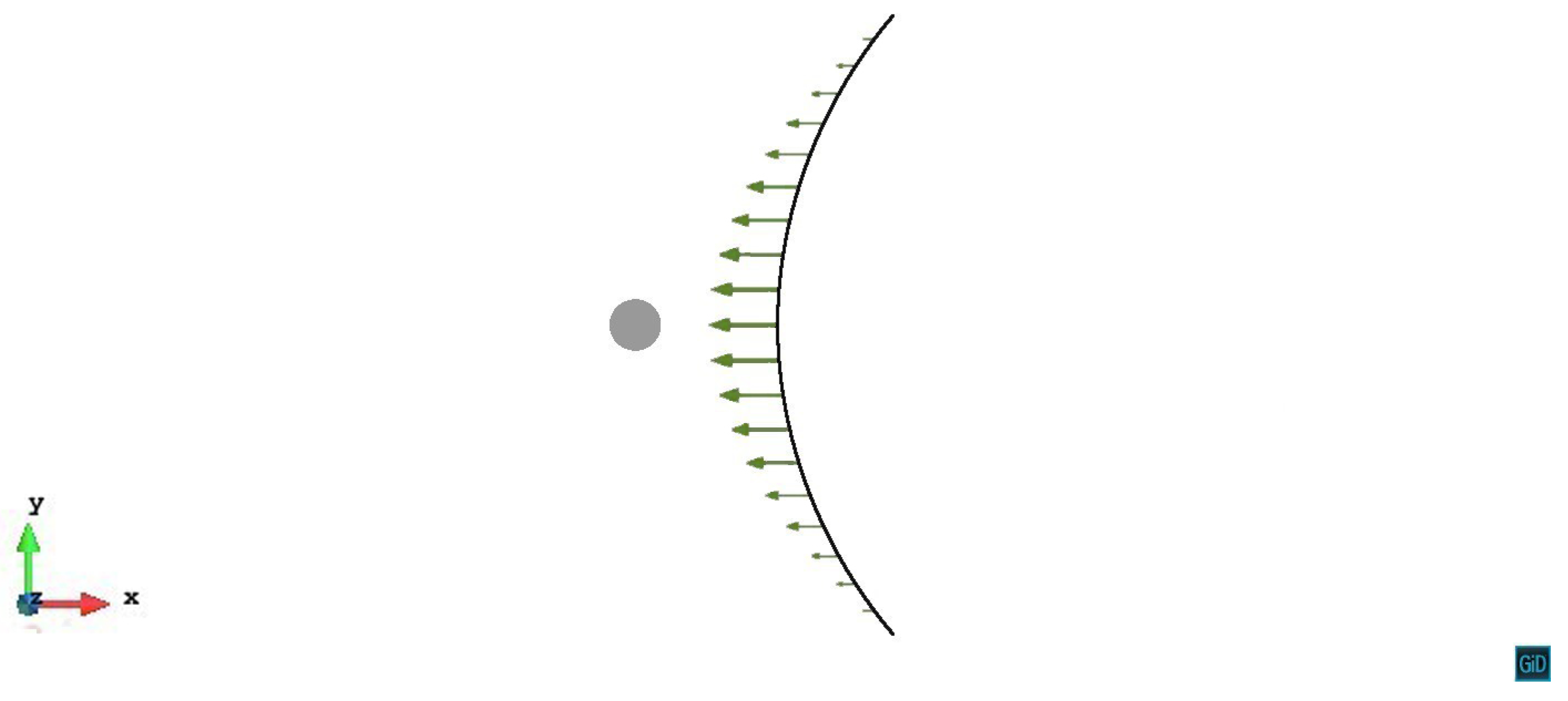
2.1. Stress Field of Spherical Precipitate
2.2. The Cross-Slip Model and Annihilation Reaction
3. Results and Discussion
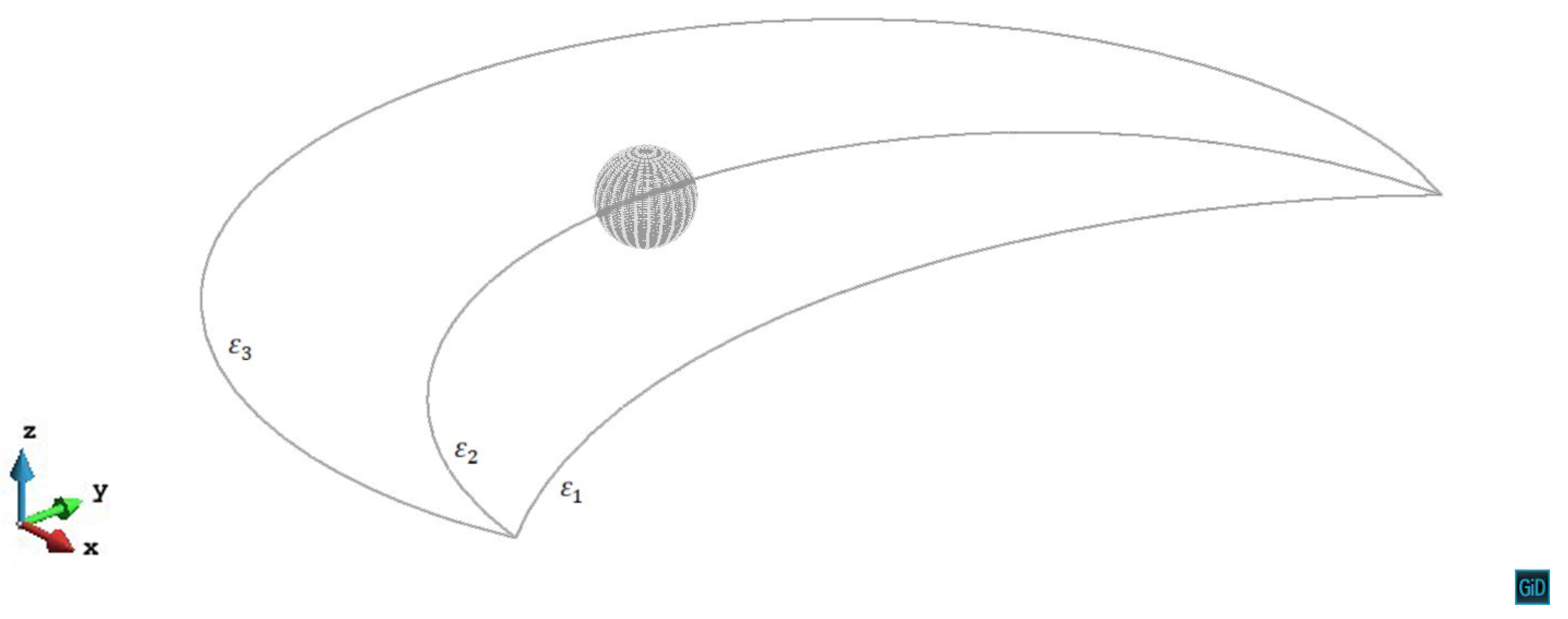
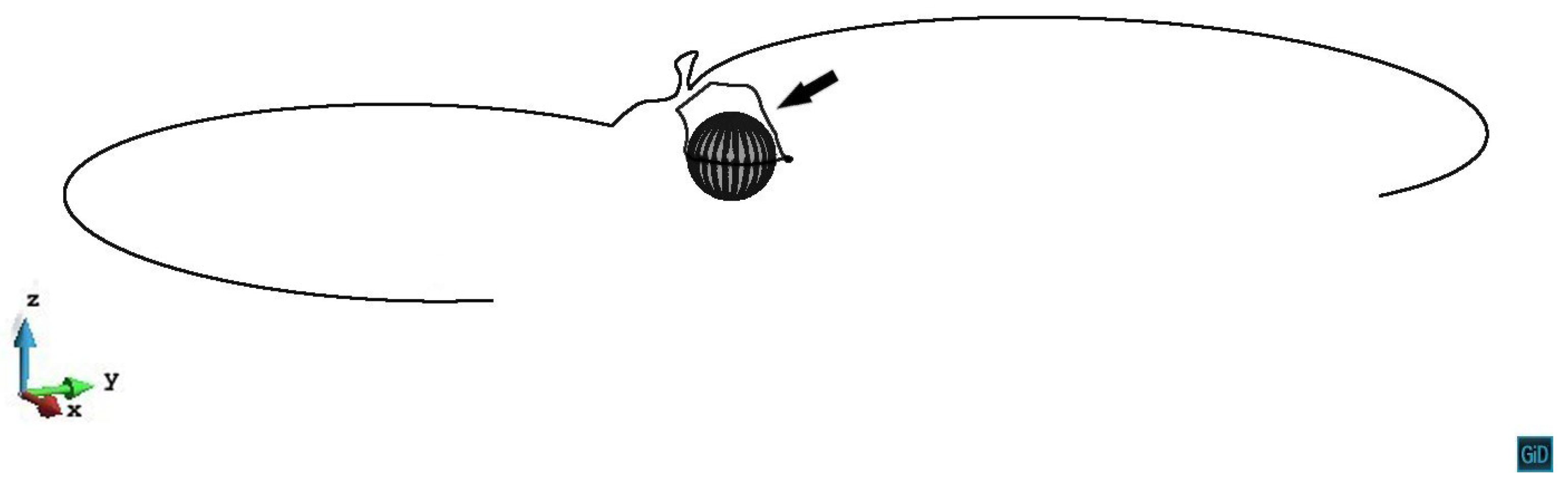
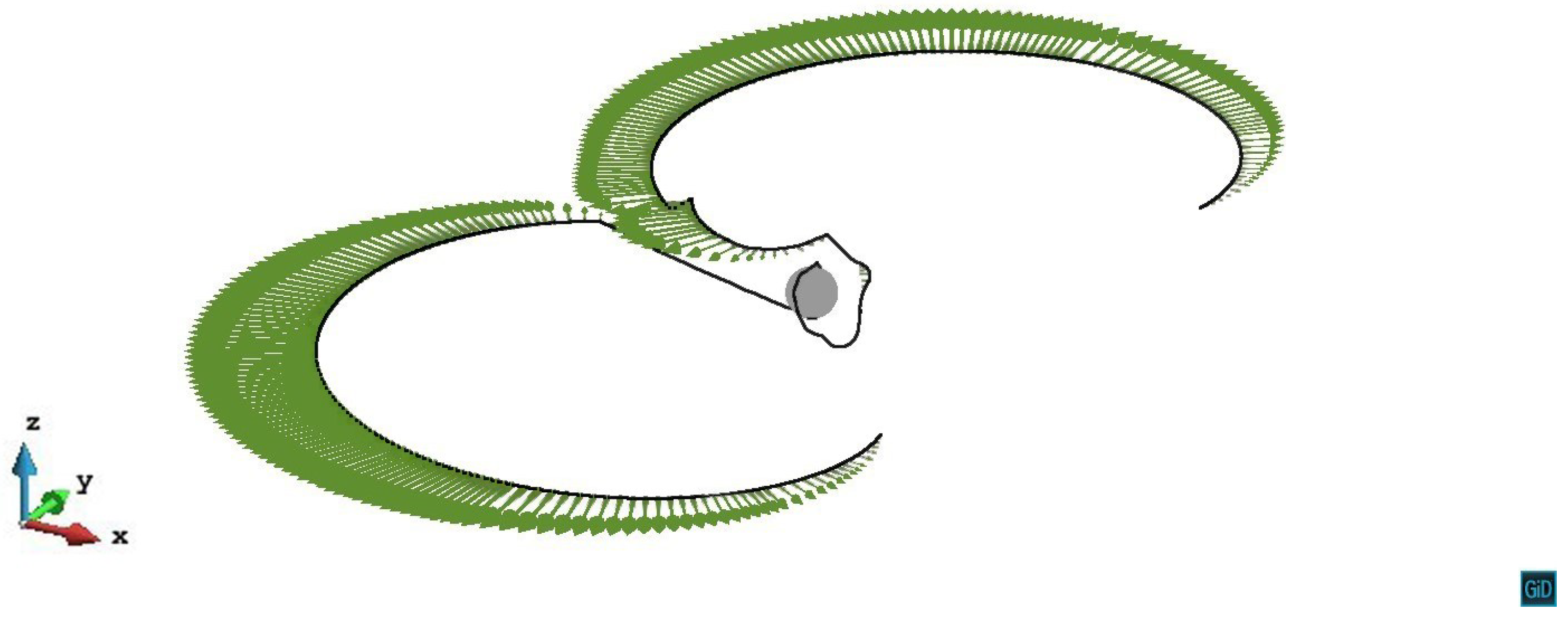
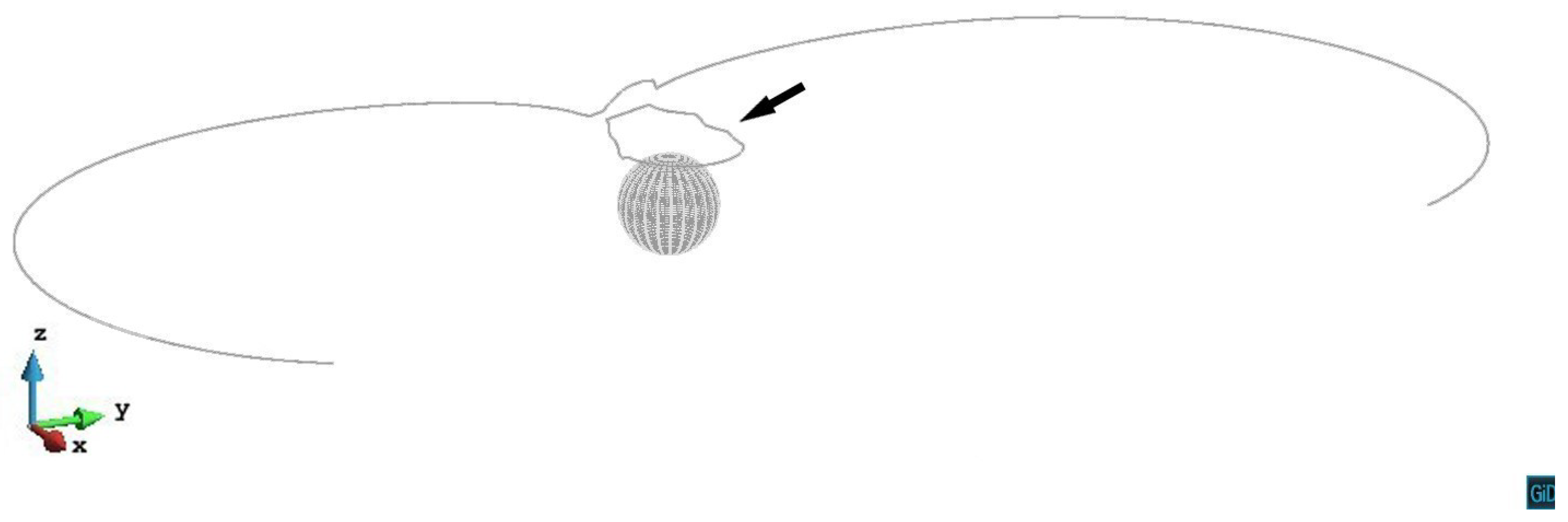
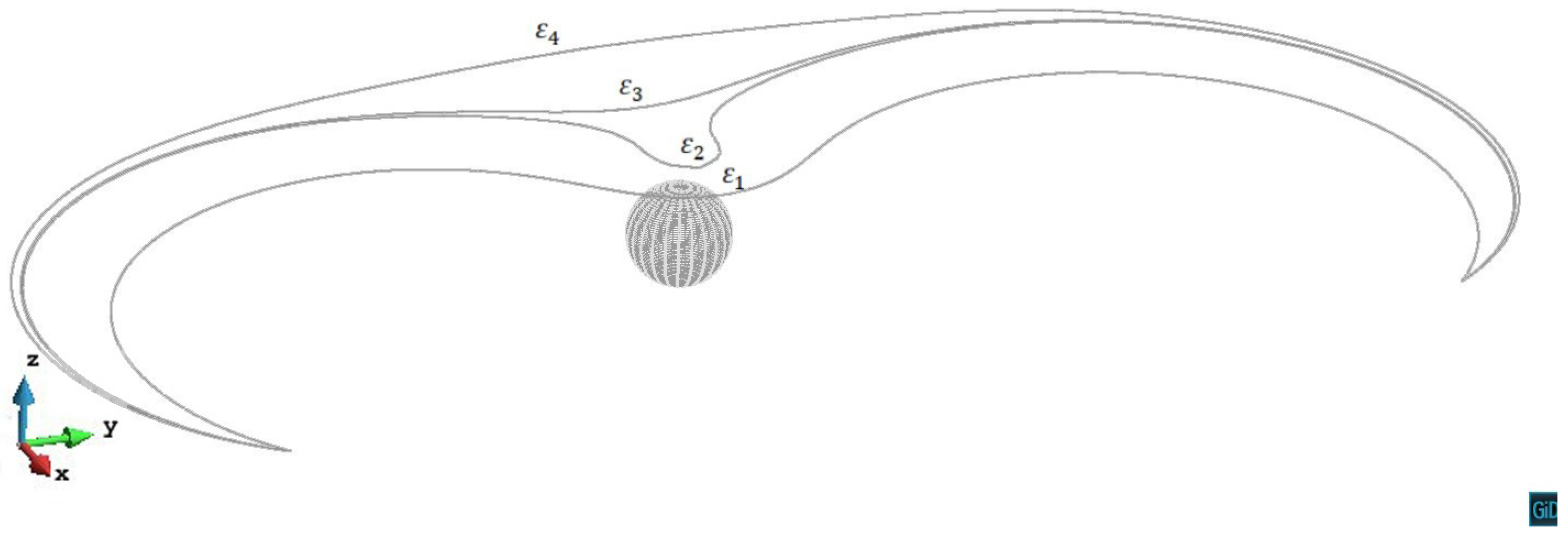
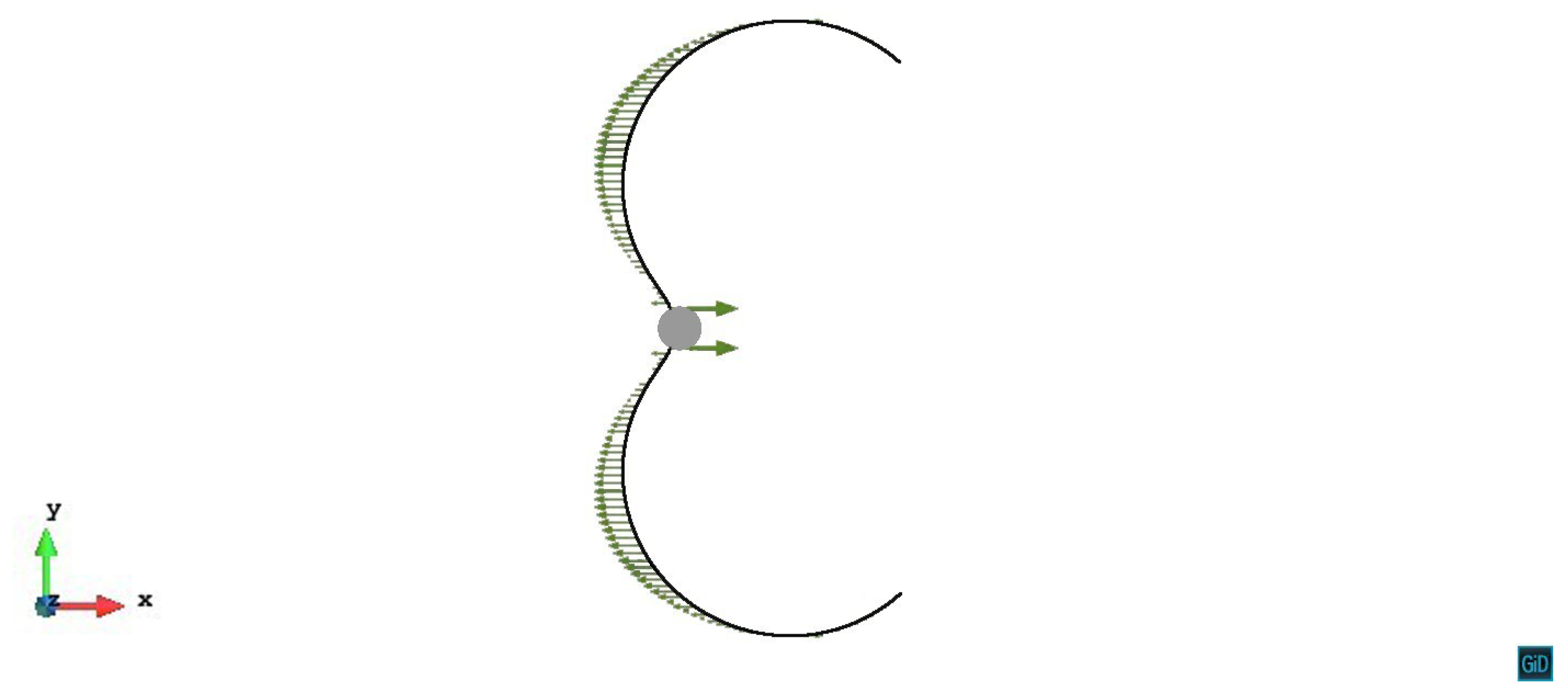
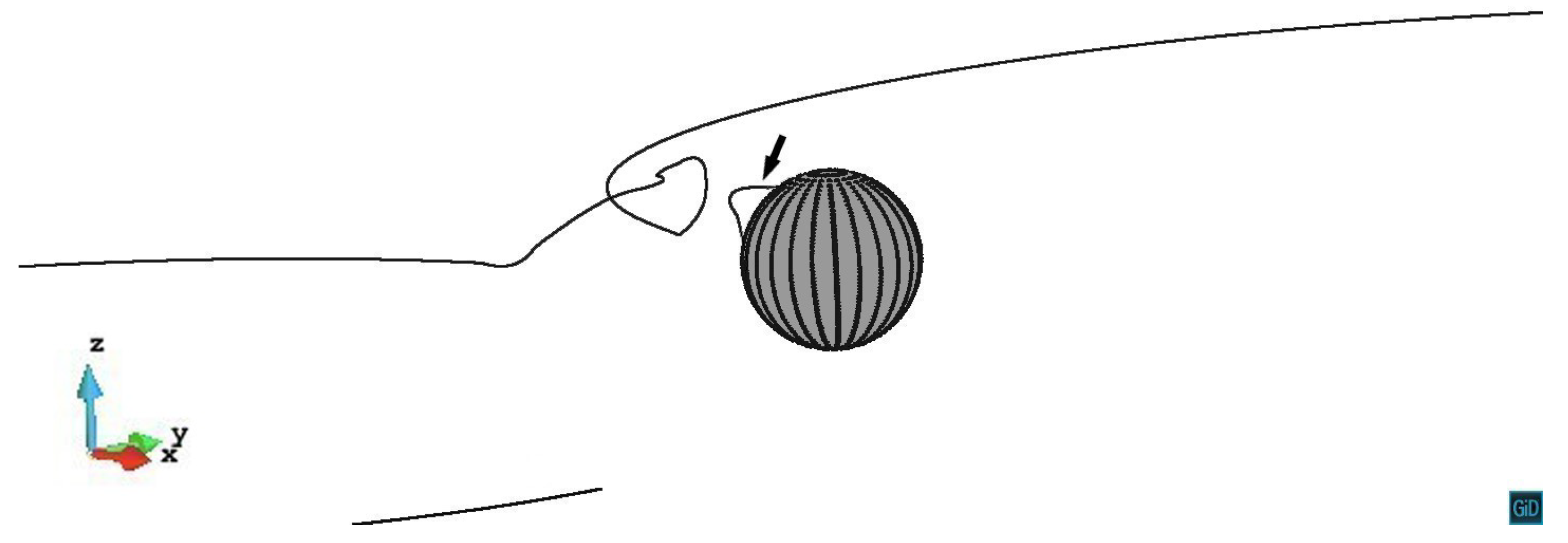
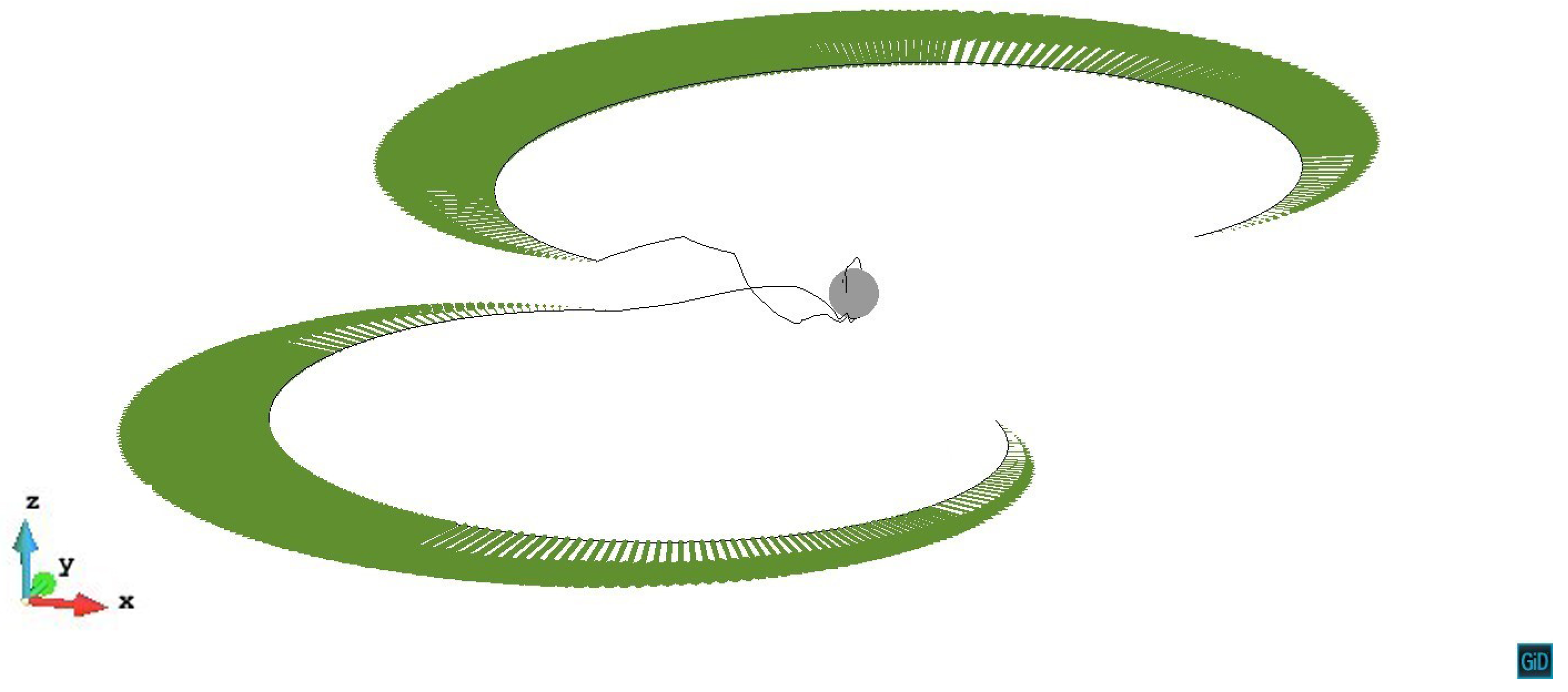
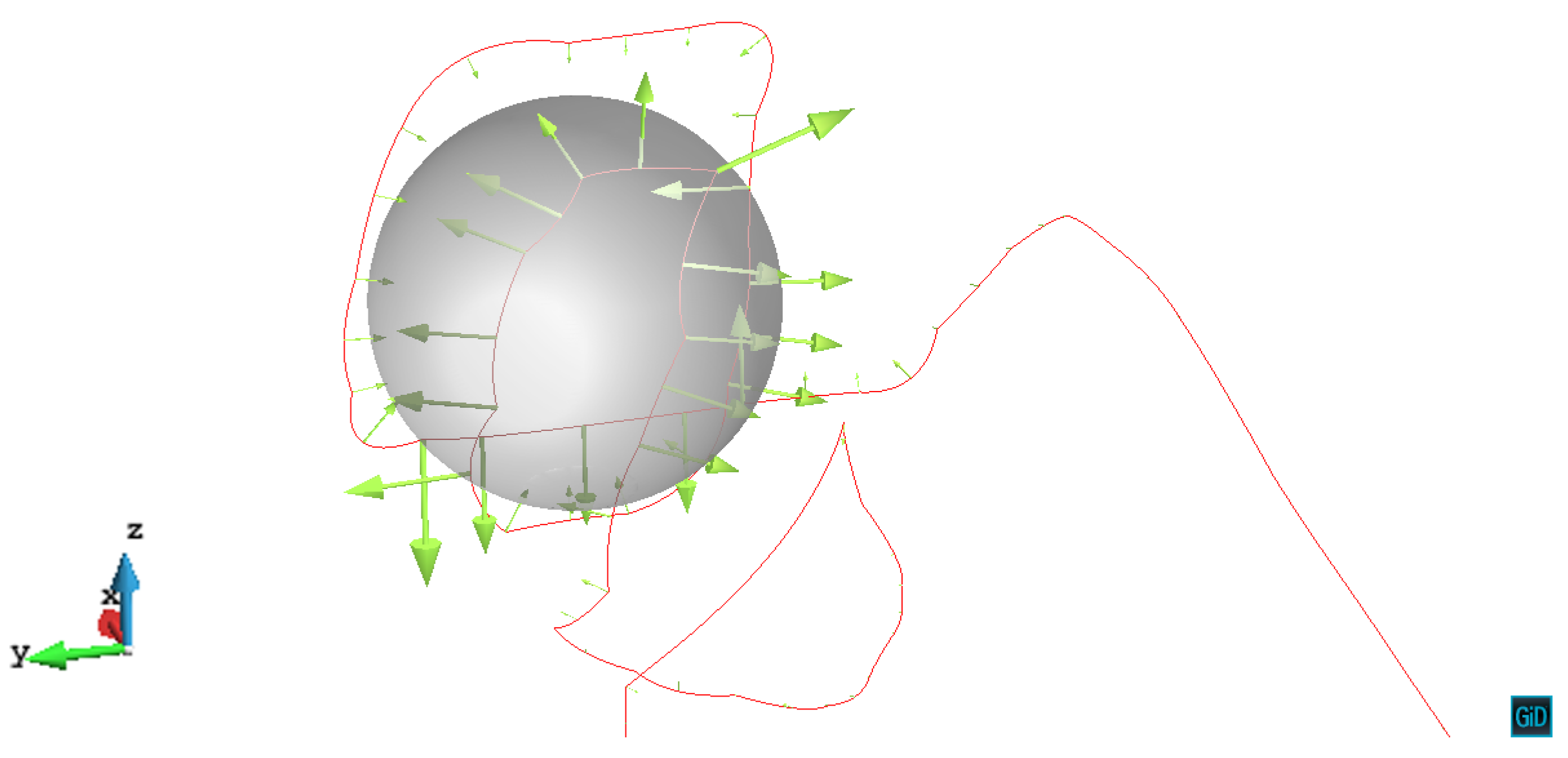
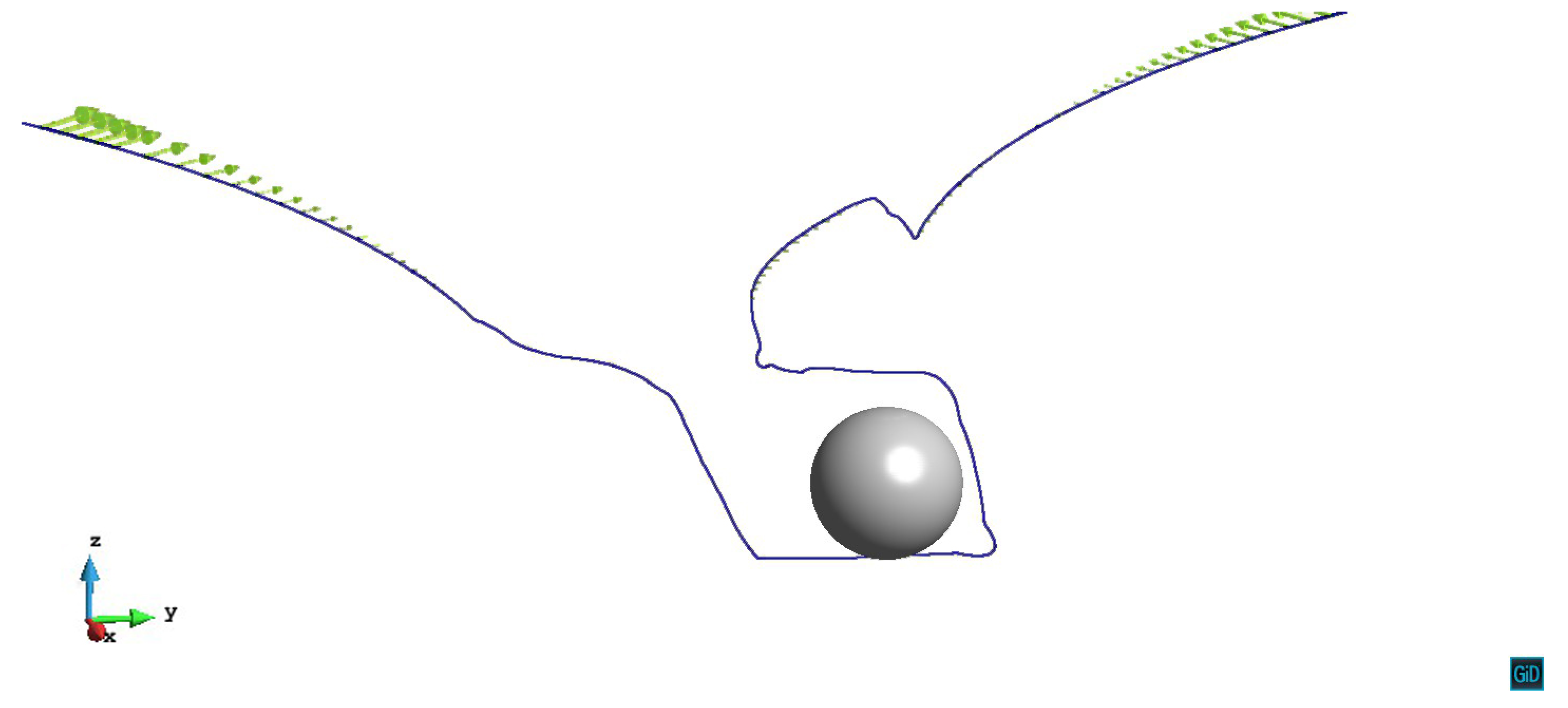
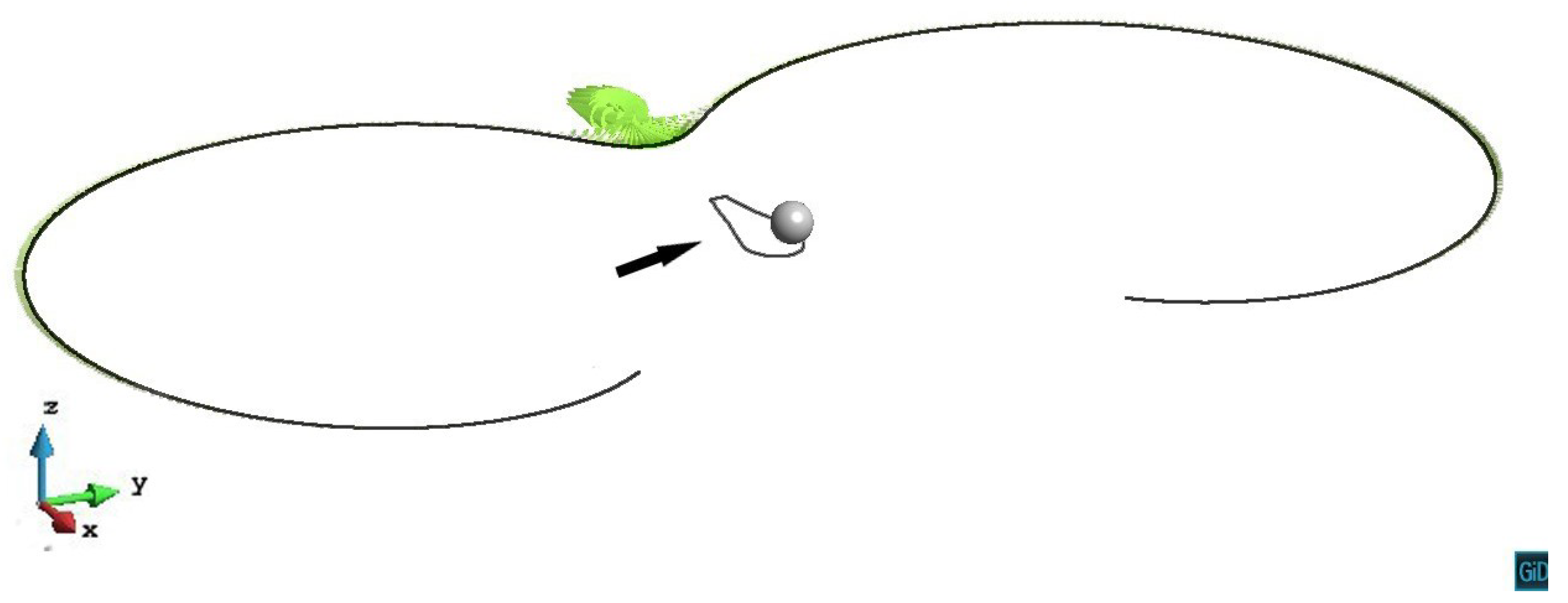
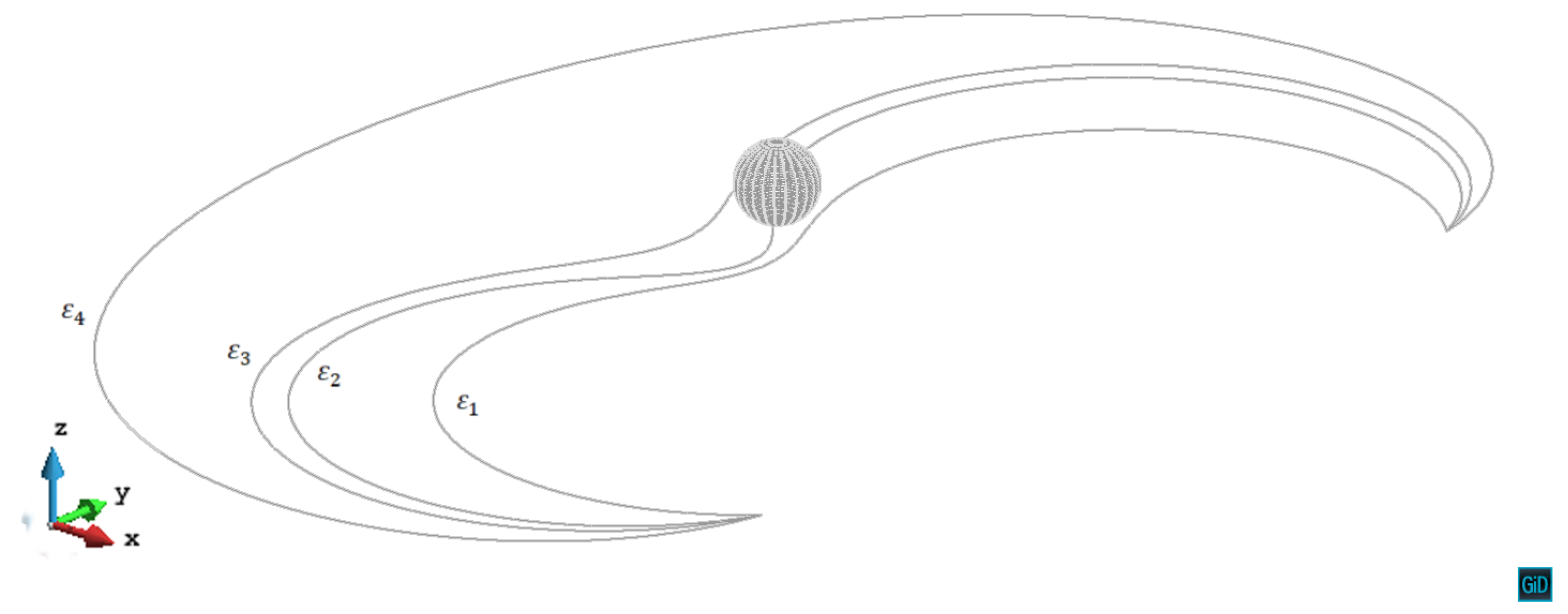
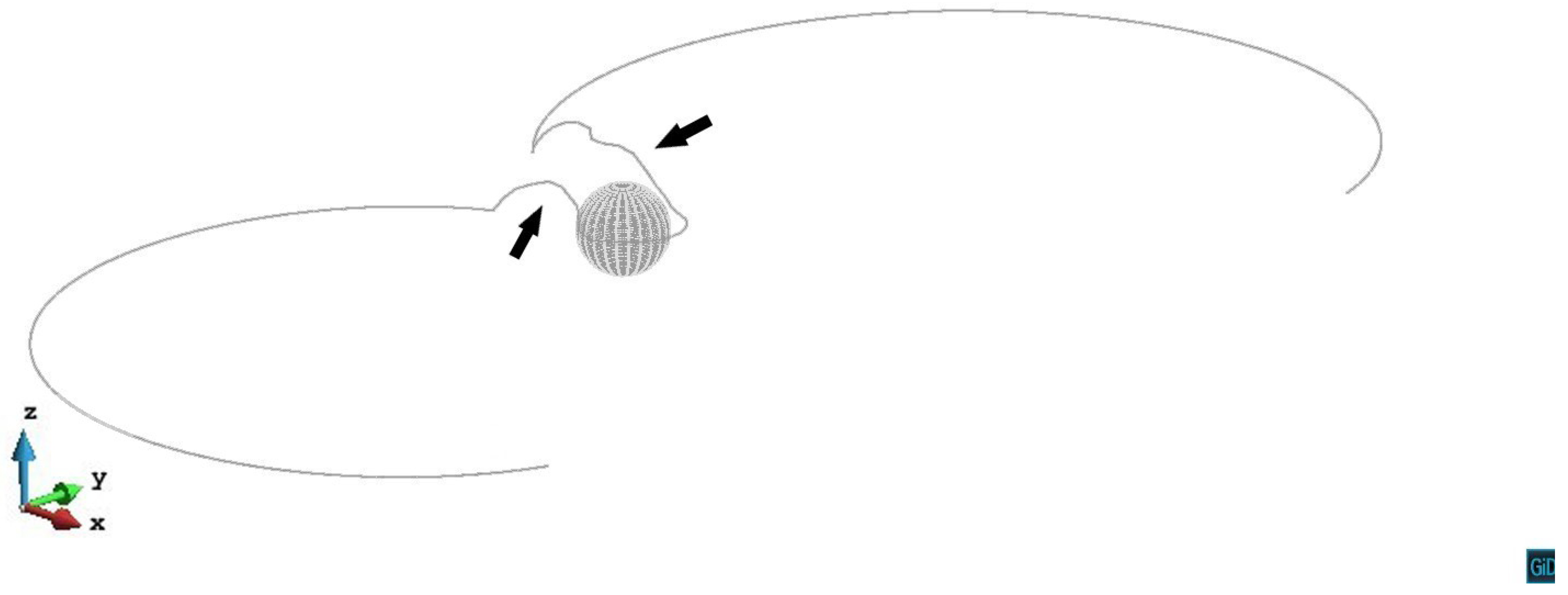
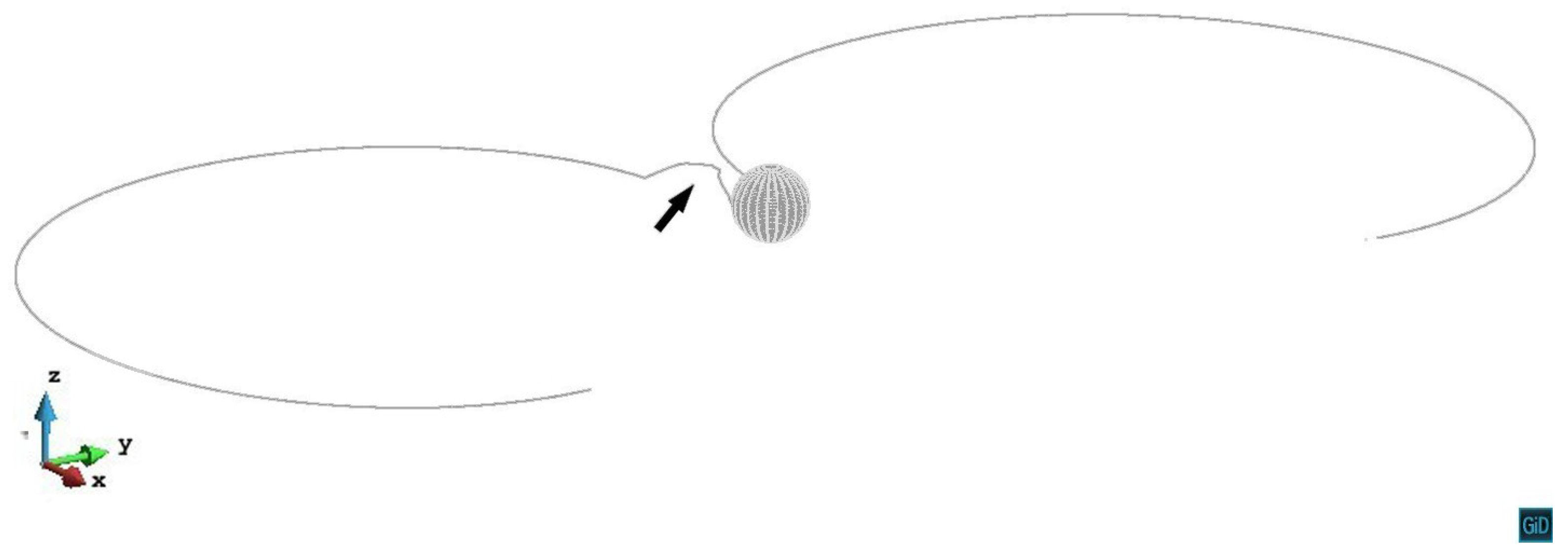
3.1. The Topological Evolution of the Dislocation around a Misfit Precipitate
3.2. The Stress and Energy Analysis of Different Slip Planes
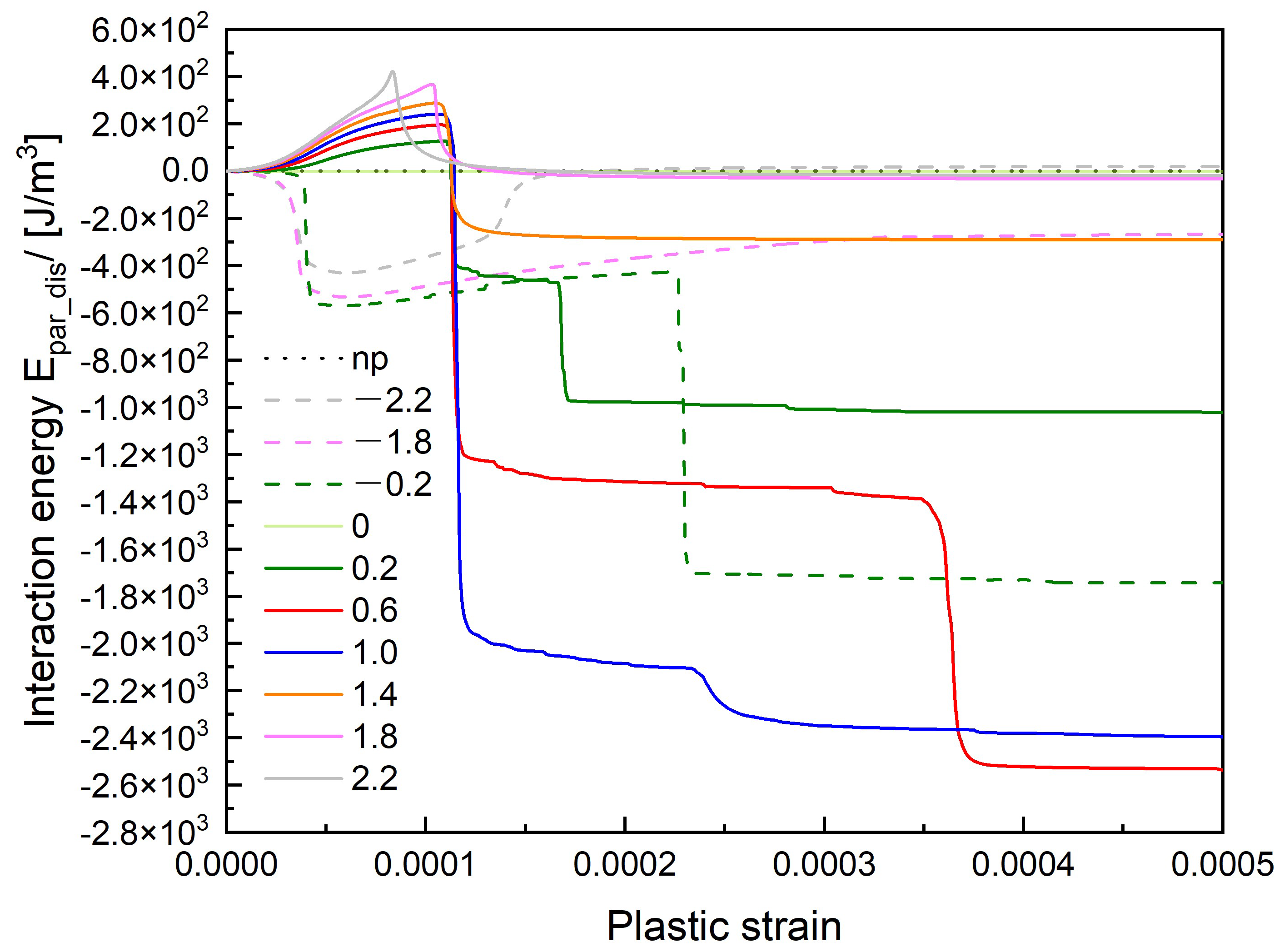
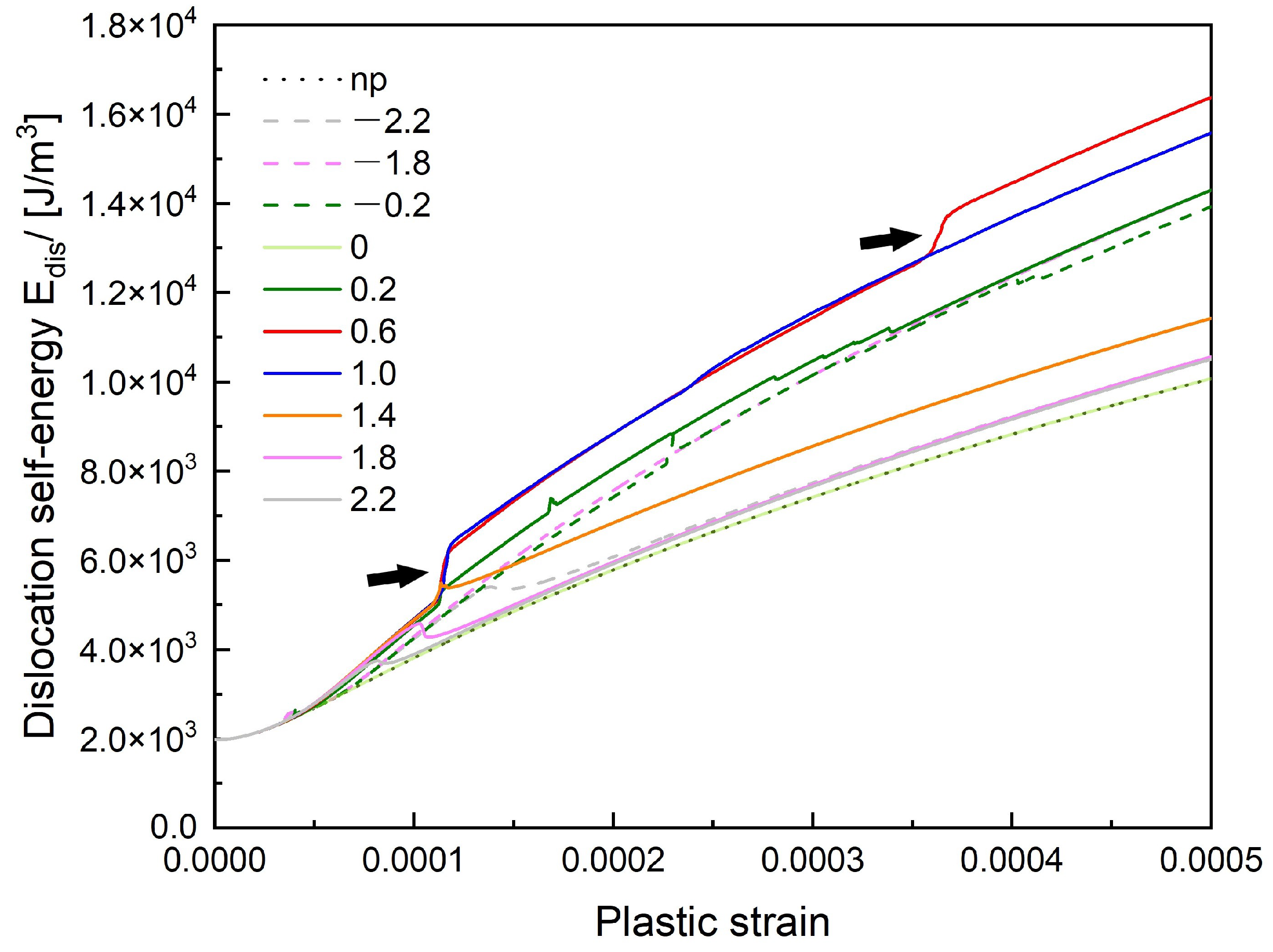
3.2.1. Energies Associated with the Dislocation Motion
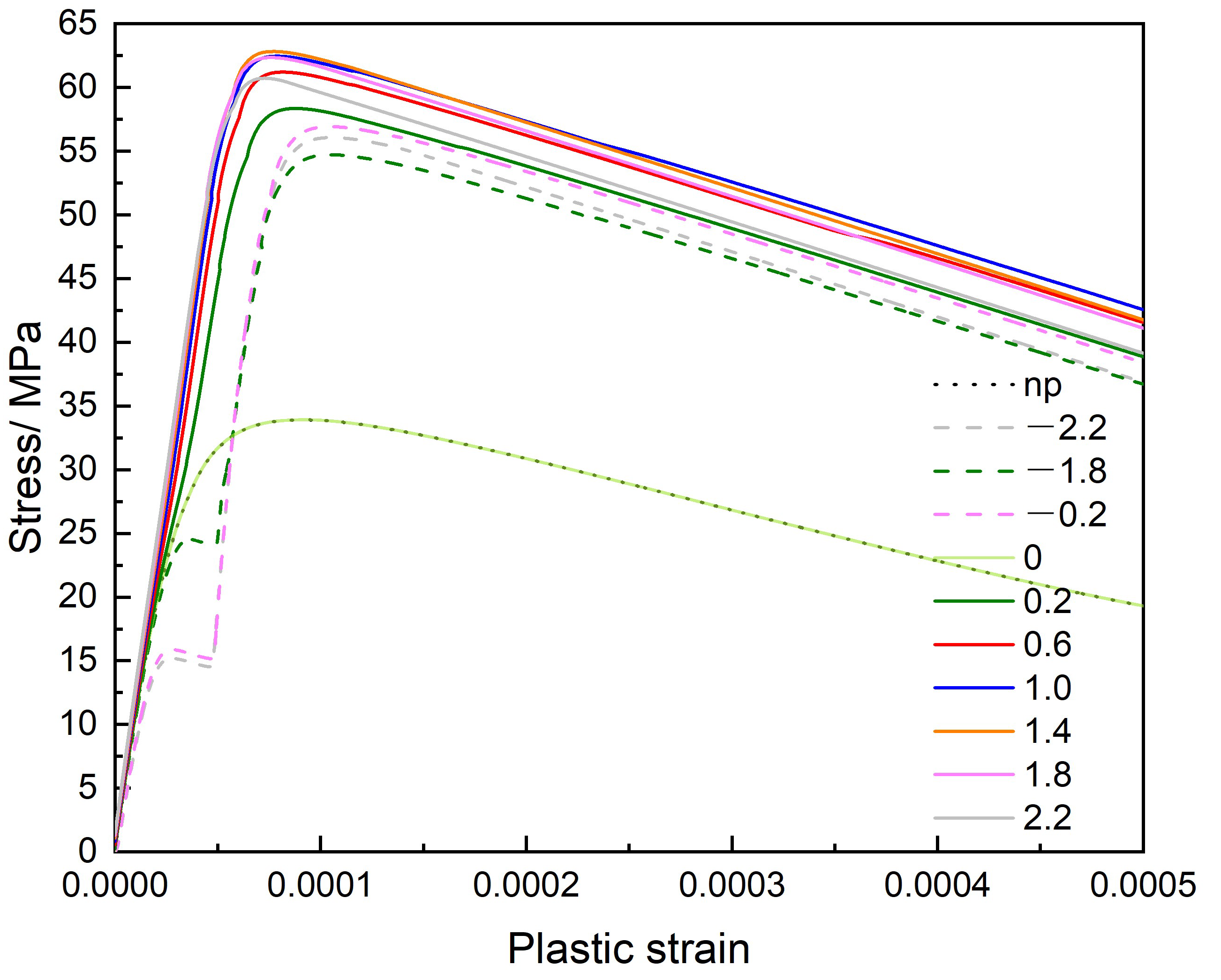
3.2.2. Analysis of the Stress and Energy Curves
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Groh, S.; Zbib, H. Advances in discrete dislocations dynamics and multiscale modeling. J. Eng. Mater. Technol. 2009, 131, 041209. [Google Scholar] [CrossRef] [Green Version]
- Brown, L. The self-stress of dislocations and the shape of extended nodes. Philos. Mag. 1964, 10, 441–466. [Google Scholar] [CrossRef]
- Bacon, D. A method for describing a flexible dislocation. Phys. Status Solidi 1967, 23, 527–538. [Google Scholar] [CrossRef]
- Foreman, A. The bowing of a dislocation segment. Philos. Mag. 1967, 15, 1011–1021. [Google Scholar] [CrossRef]
- Kubin, L.P.; Canova, G.; Condat, M.; Devincre, B.; Pontikis, V.; Bréchet, Y. Dislocation microstructures and plastic flow: A 3D simulation. In Solid State Phenomena; Trans Tech Publications: Zurich, Switzerland, 1992; Volume 23, pp. 455–472. [Google Scholar]
- Zbib, H.; Rhee, M.; Hirth, J. 3D simulation of curved dislocations: Discretization and long range interactions. Adv. Eng. Plast. Appl. 1996, 15–20. [Google Scholar] [CrossRef]
- Rhee, M.; Stolken, J.S.; Bulatov, V.V.; de la Rubia, T.D.; Zbib, H.M.; Hirth, J.P. Dislocation stress fields for dynamic codes using anisotropic elasticity: Methodology and analysis. Mater. Sci. Eng. A 2001, 309, 288–293. [Google Scholar] [CrossRef]
- Rhee, M.; Zbib, H.M.; Hirth, J.P.; Huang, H.; de la Rubia, T. Models for long-/short-range interactions and cross slip in 3D dislocation simulation of BCC single crystals. Model. Simul. Mater. Sci. Eng. 1998, 6, 467–492. [Google Scholar] [CrossRef]
- Zbib, H.M.; de la Rubia, T.D. A multiscale model of plasticity. Int. J. Plast. 2002, 18, 1133–1163. [Google Scholar] [CrossRef]
- Takahashi, A.; Ghoniem, N.M. A computational method for dislocation–precipitate interaction. J. Mech. Phys. Solids 2008, 56, 1534–1553. [Google Scholar] [CrossRef]
- Keyhani, A.; Roumina, R. Dislocation-precipitate interaction map. Comput. Mater. Sci. 2018, 141, 153–161. [Google Scholar] [CrossRef]
- Muraishi, S.; Liu, J. Micromechanical Analysis of Dislocation and Precipitate Interactions in Aluminum Alloys. In Materials Science Forum; Trans Tech Publications: Zurich, Switzerland, 2020; Volume 985, pp. 23–28. [Google Scholar]
- Liu, J.; Muraishi, S. Energy analysis of misfit hardening by parametric dislocation dynamics simulation. Comput. Mater. Sci. 2020, 178, 109630. [Google Scholar] [CrossRef]
- Eshelby, J.D. The determination of the elastic field of an ellipsoidal inclusion, and related problems. Proc. R. Soc. Lond. Ser. A Math. Phys. Sci. 1957, 241, 376–396. [Google Scholar]
- Muraishi, S. Efficient interpolation algorithm of electro-elastic Green’s function for boundary integral equation method and Eshelby inclusion problem. Int. J. Solids Struct. 2016, 100, 297–306. [Google Scholar] [CrossRef]
- Liu, J.; Muraishi, S. Dislocation Dynamics Simulations of Dislocation-Particle Bypass Mechanisms. In Materials Science Forum; Trans Tech Publications: Zurich, Switzerland, 2020; Volume 985, pp. 35–41. [Google Scholar]
- Hatano, T.; Kaneko, T.; Abe, Y.; Matsui, H. Void-induced cross slip of screw dislocations in fcc copper. Phys. Rev. B 2008, 77, 064108. [Google Scholar] [CrossRef] [Green Version]
- Kumar, A.; Hauser, F.; Dorn, J. Viscous drag on dislocations in aluminum at high strain rates. Acta Metall. 1968, 16, 1189–1197. [Google Scholar] [CrossRef]
- Mura, T. Micromechanics of Defects in Solids; Springer Science & Business Media: Berlin, Germany, 2013. [Google Scholar]
- Erel, C.; Po, G.; Crosby, T.; Ghoniem, N. Generation and interaction mechanisms of prismatic dislocation loops in FCC metals. Comput. Mater. Sci. 2017, 140, 32–46. [Google Scholar] [CrossRef]






















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zheng, H.; Liu, J.; Muraishi, S. Dislocation Topological Evolution and Energy Analysis in Misfit Hardening of Spherical Precipitate by the Parametric Dislocation Dynamics Simulation. Materials 2021, 14, 6368. https://doi.org/10.3390/ma14216368
Zheng H, Liu J, Muraishi S. Dislocation Topological Evolution and Energy Analysis in Misfit Hardening of Spherical Precipitate by the Parametric Dislocation Dynamics Simulation. Materials. 2021; 14(21):6368. https://doi.org/10.3390/ma14216368
Chicago/Turabian StyleZheng, Haiwei, Jianbin Liu, and Shinji Muraishi. 2021. "Dislocation Topological Evolution and Energy Analysis in Misfit Hardening of Spherical Precipitate by the Parametric Dislocation Dynamics Simulation" Materials 14, no. 21: 6368. https://doi.org/10.3390/ma14216368