Modeling and Design of SHPB to Characterize Brittle Materials under Compression for High Strain Rates


Abstract
:1. Introduction
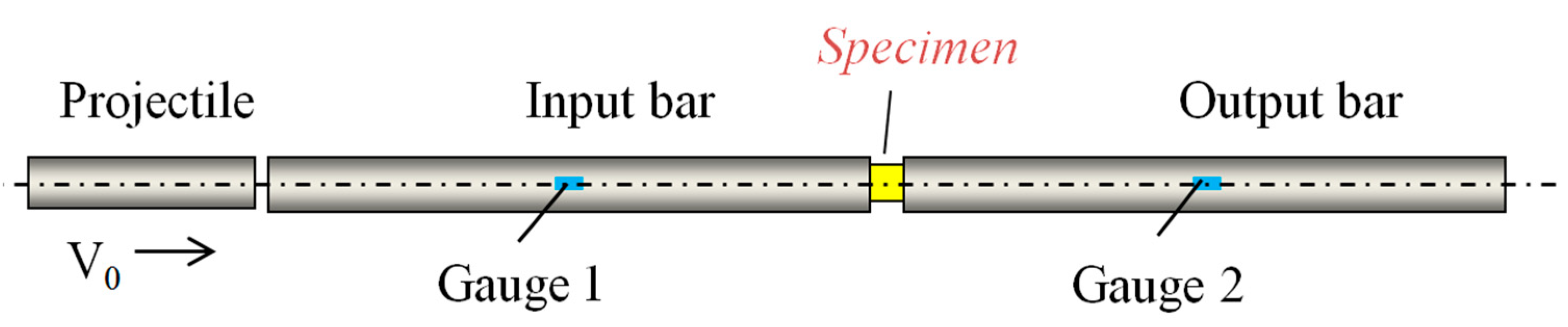
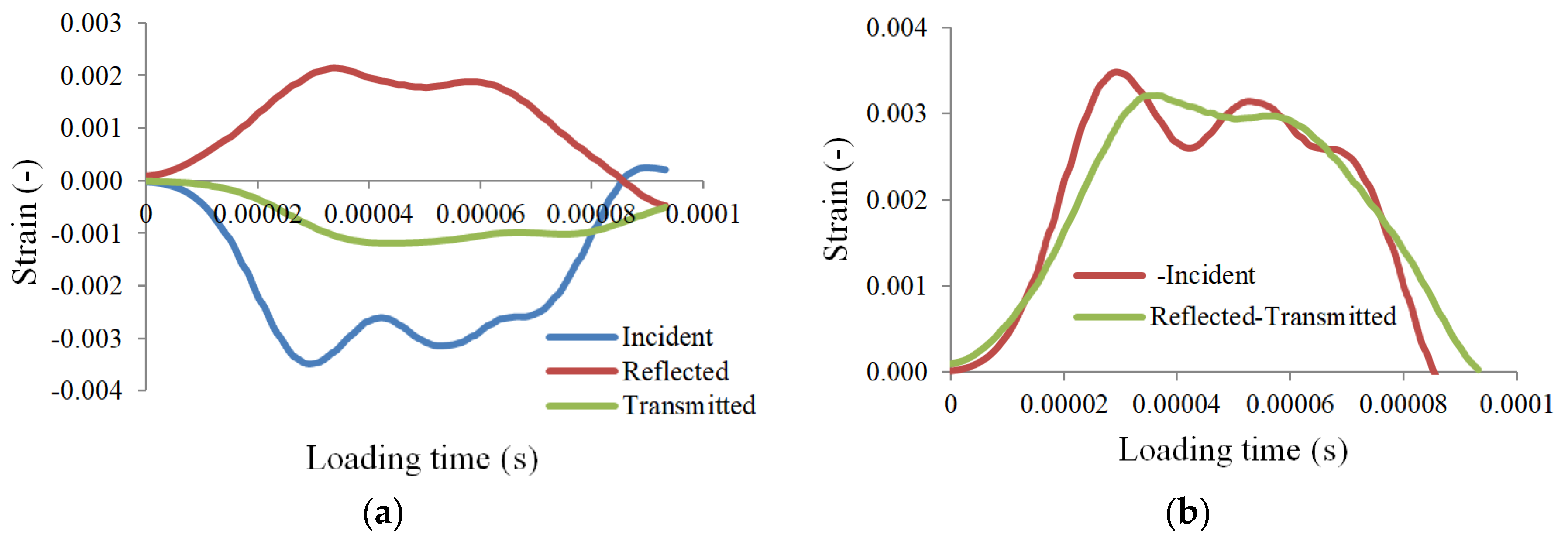
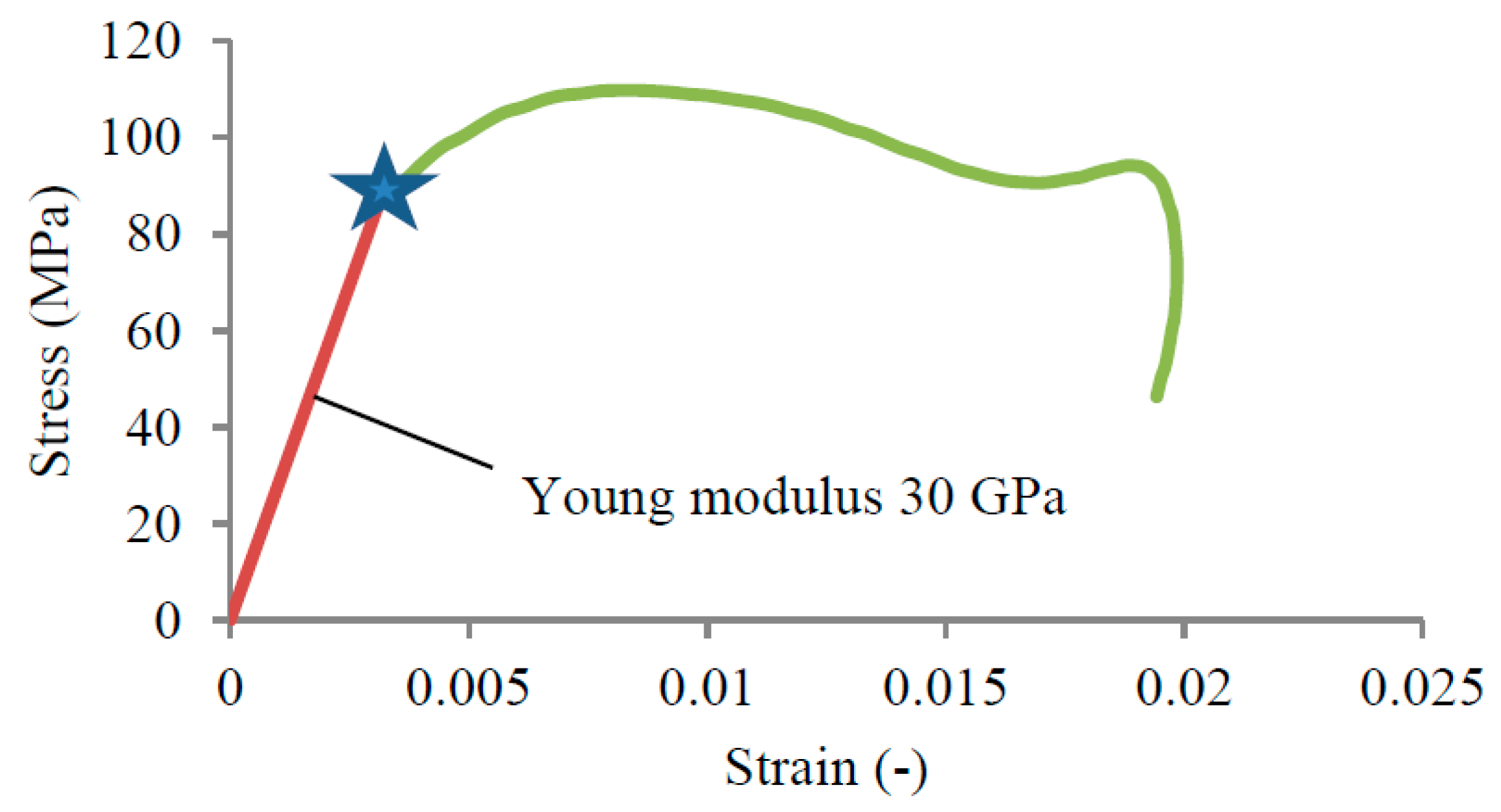
2. SHPB Technique for Concrete—Analytical Description
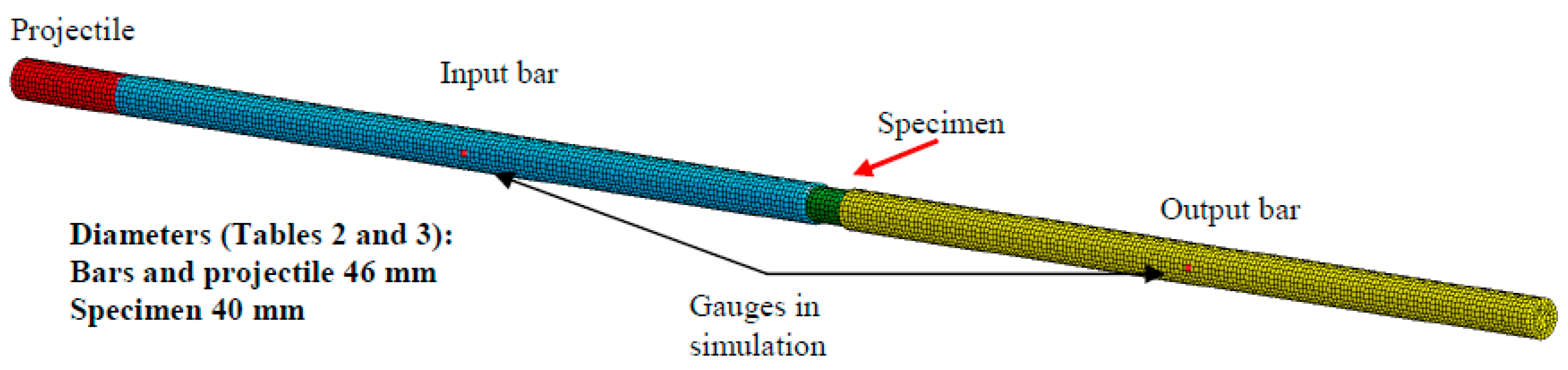
3. Simulation of the SPHB Technique for Material Characterization of Concrete at High Strain Rates
4. Parametric Study Concerning the Main Crucial Material Parameters
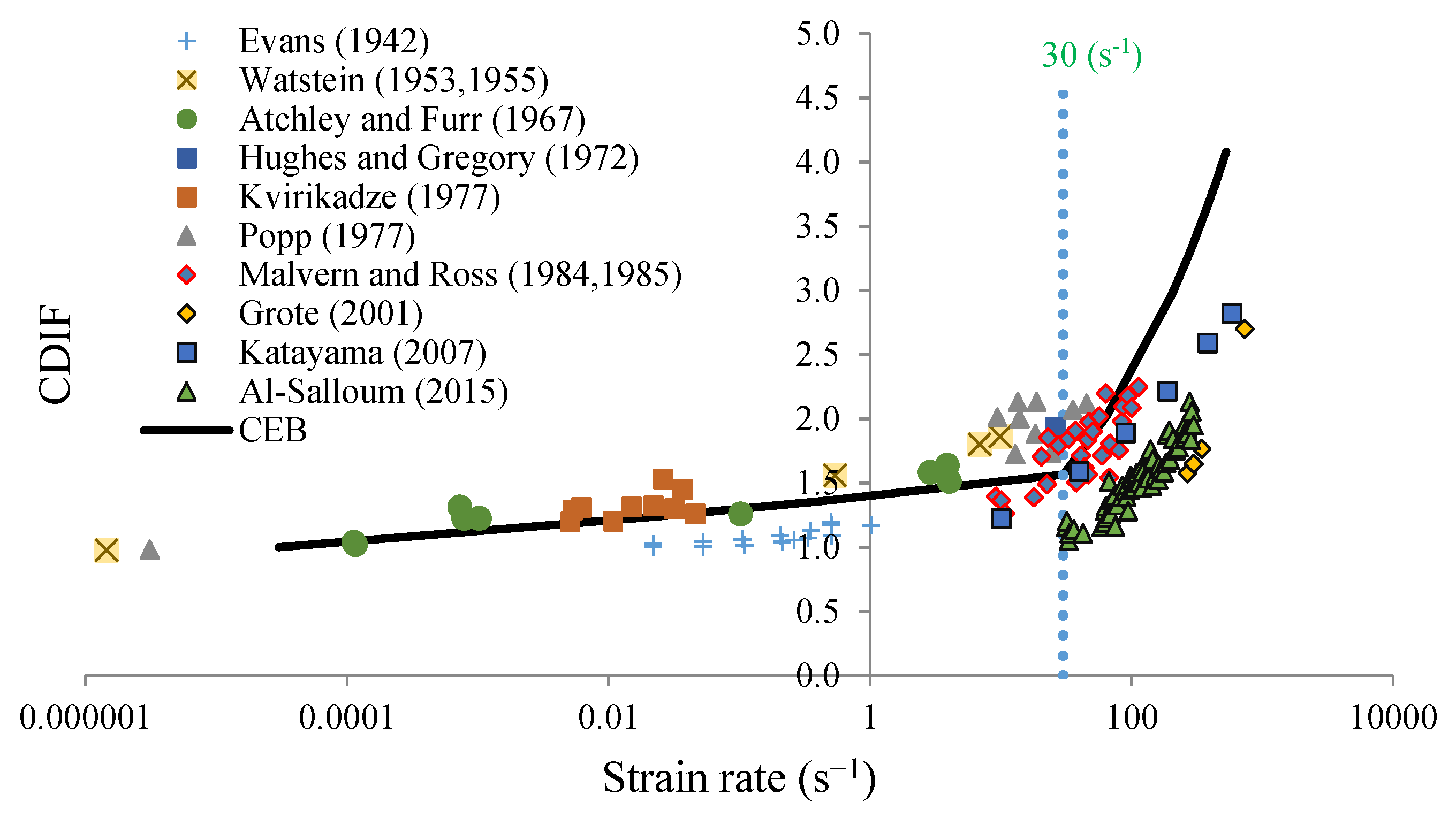
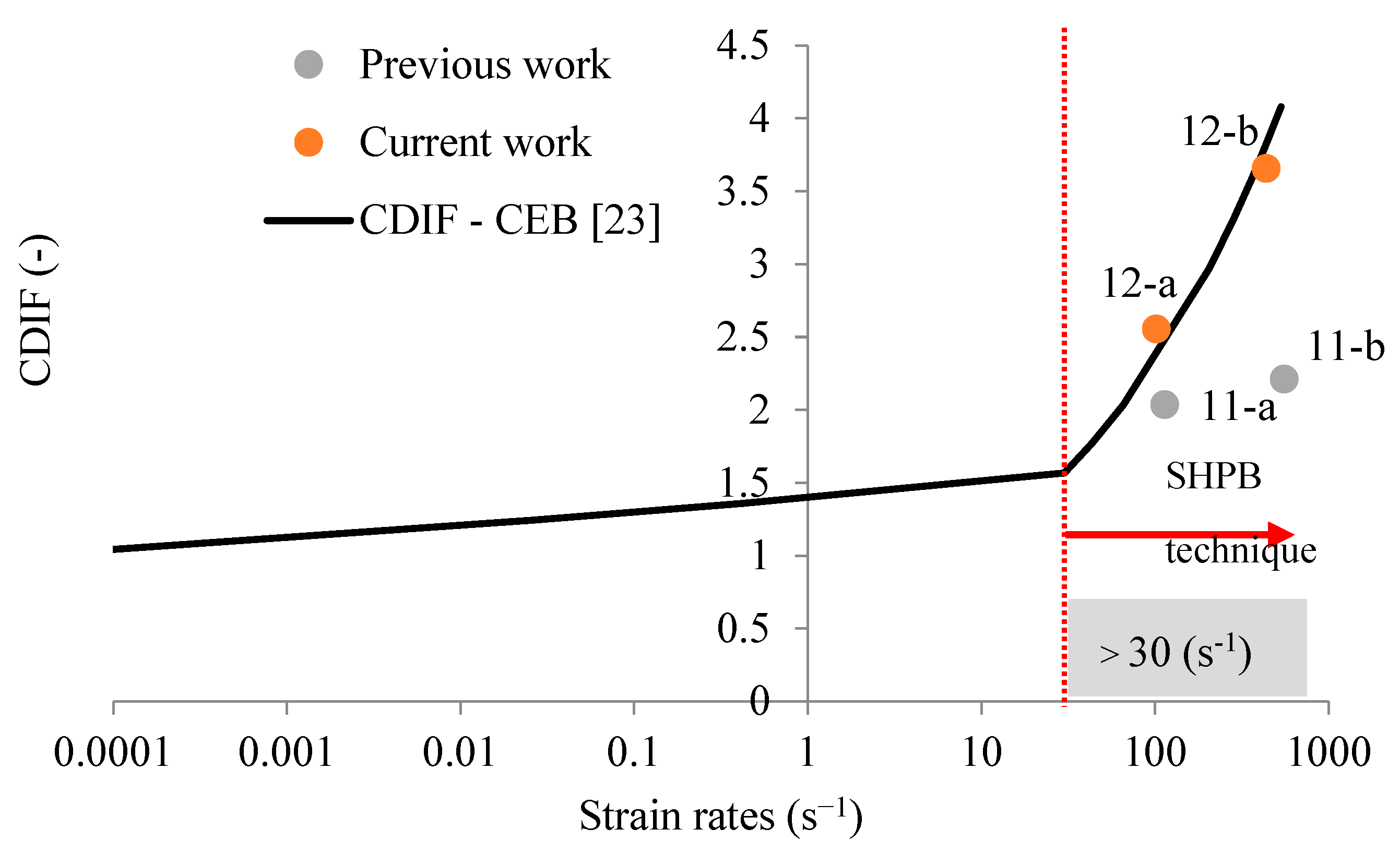
4.1. Analysis of Strain Rate Sensitivity in Compression
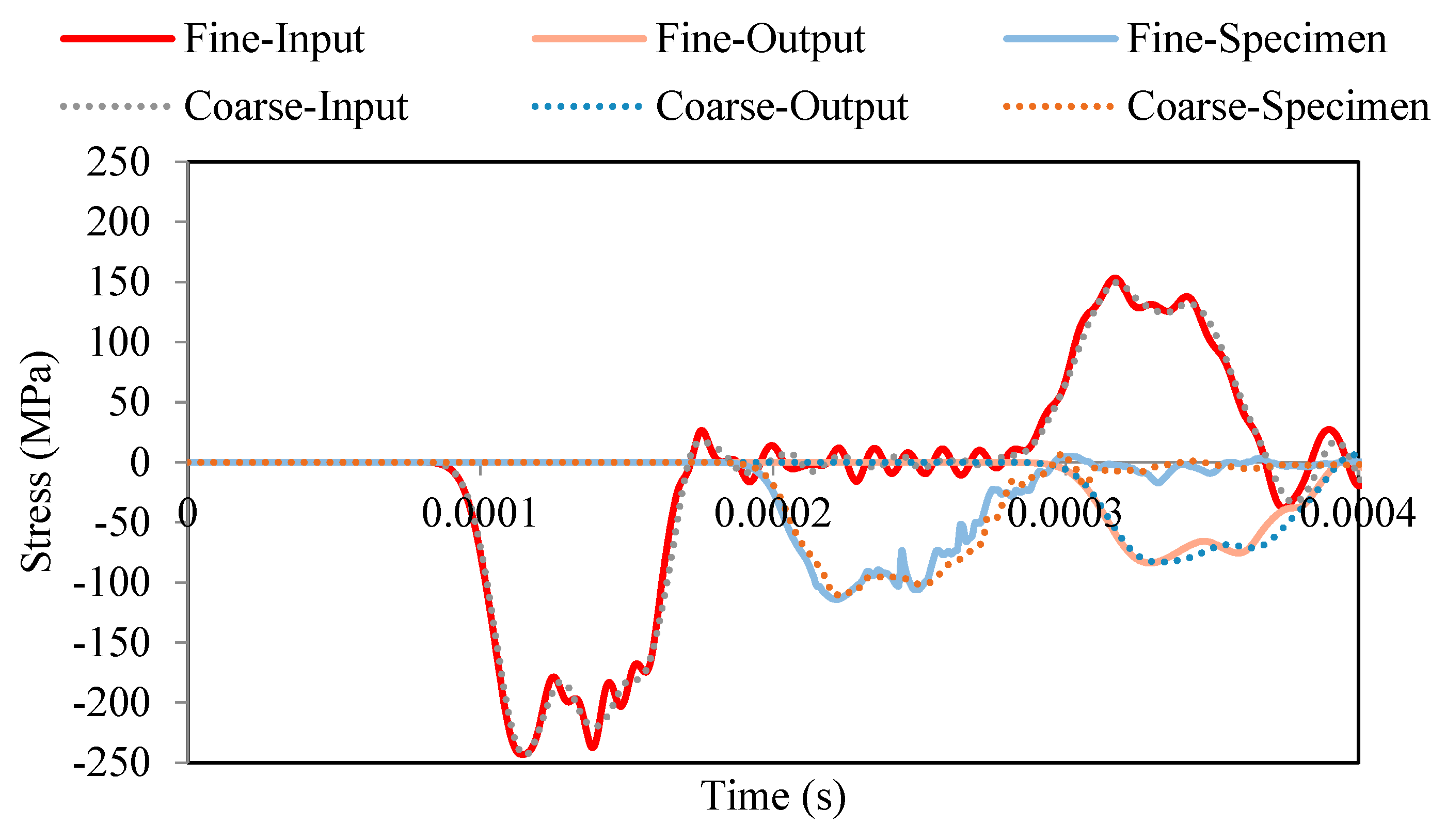
4.2. Analysis of Mesh Size Sensitivity
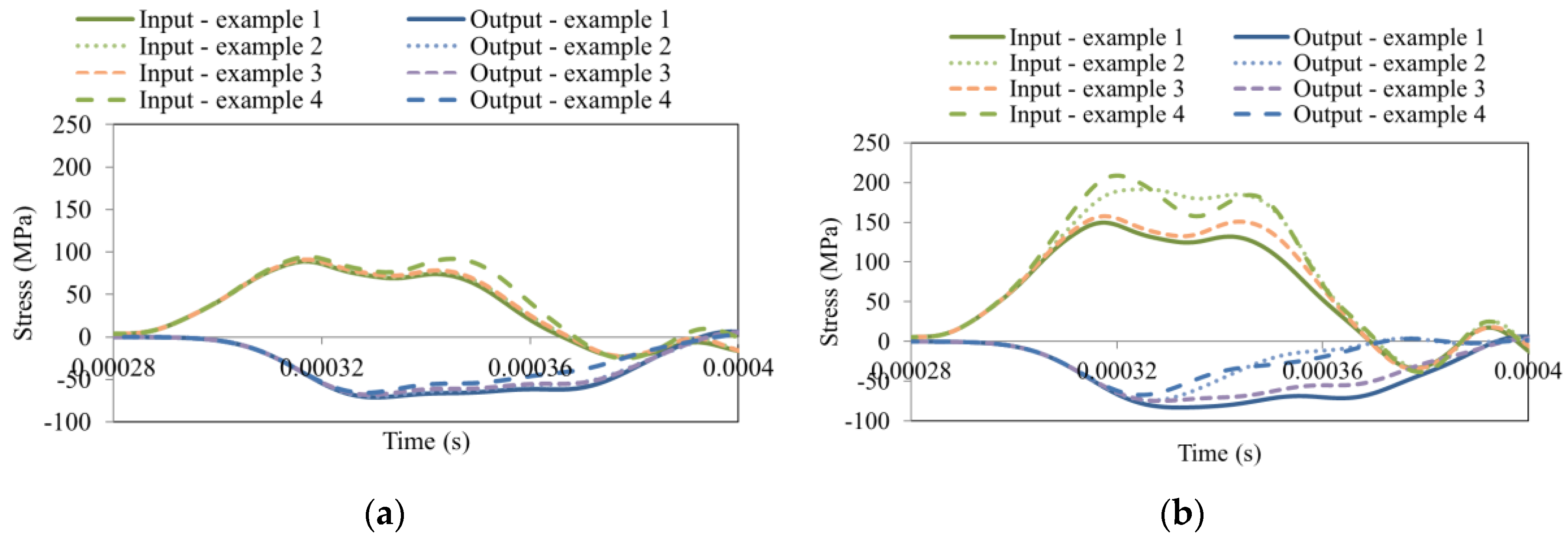
4.3. Analysis of the Fracture Energy in Compression Sensitivity
5. Conclusions
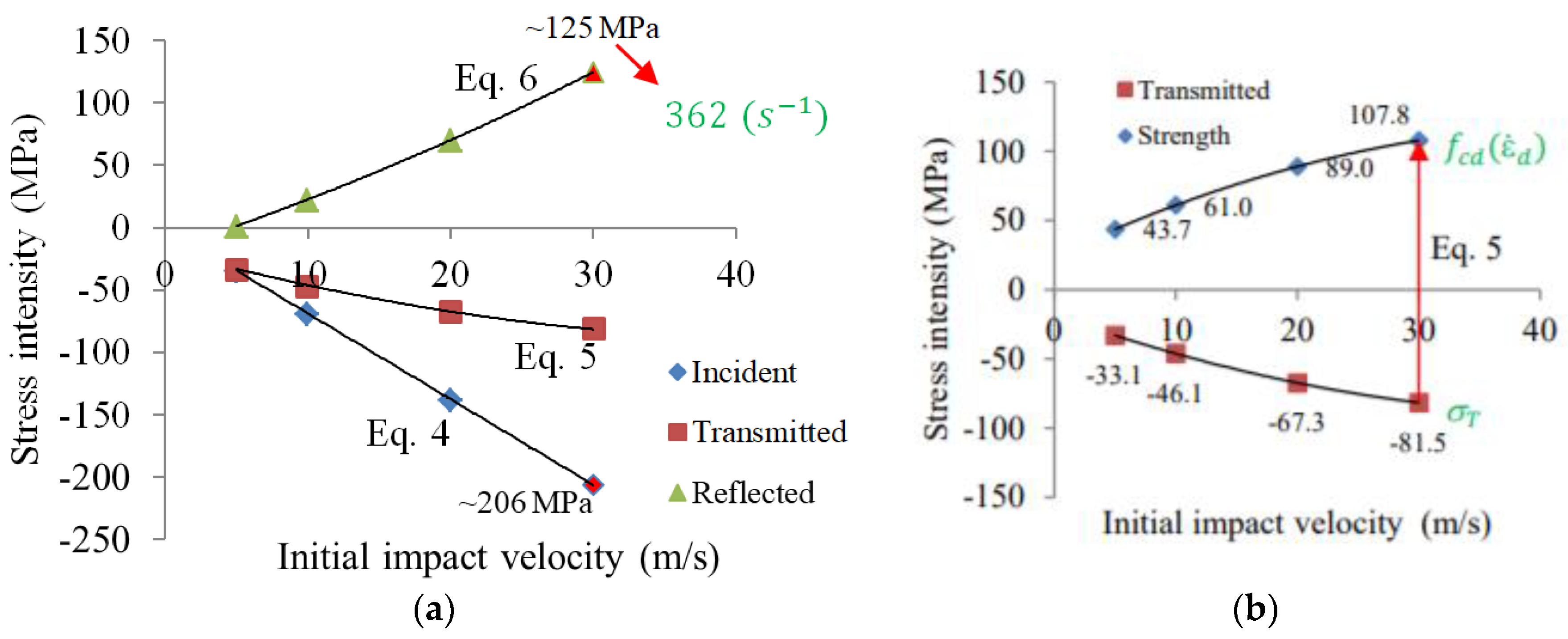
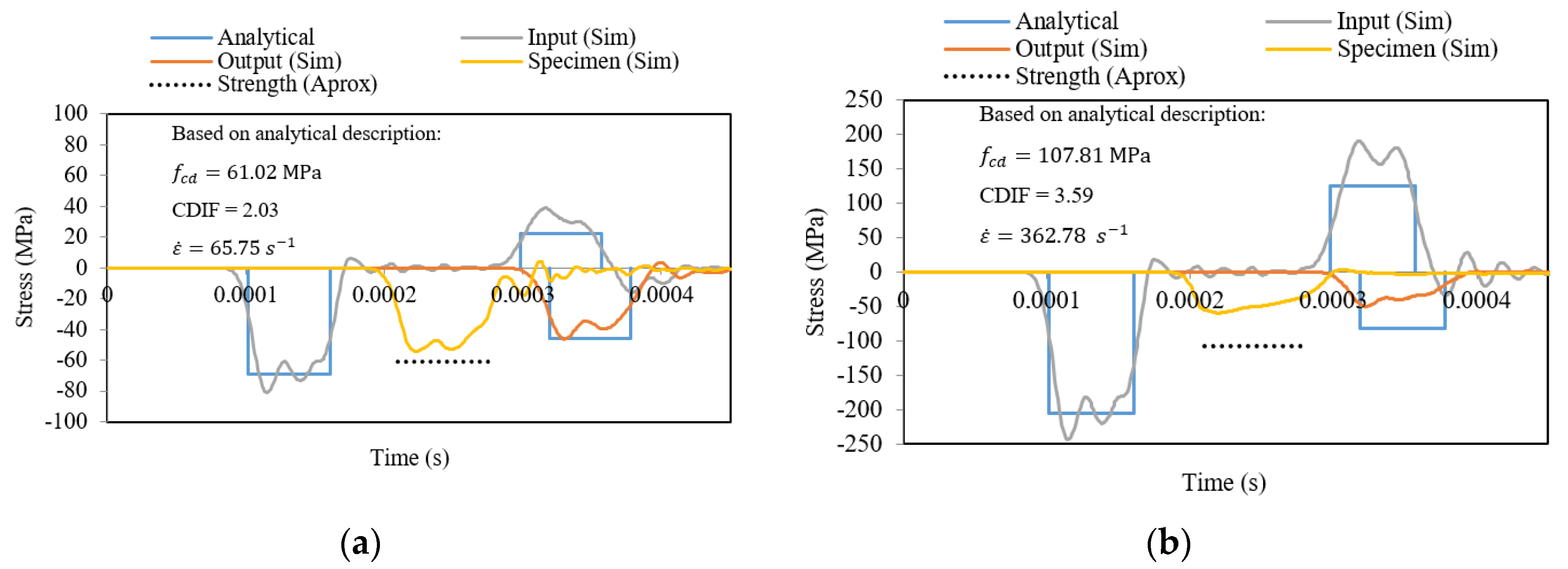
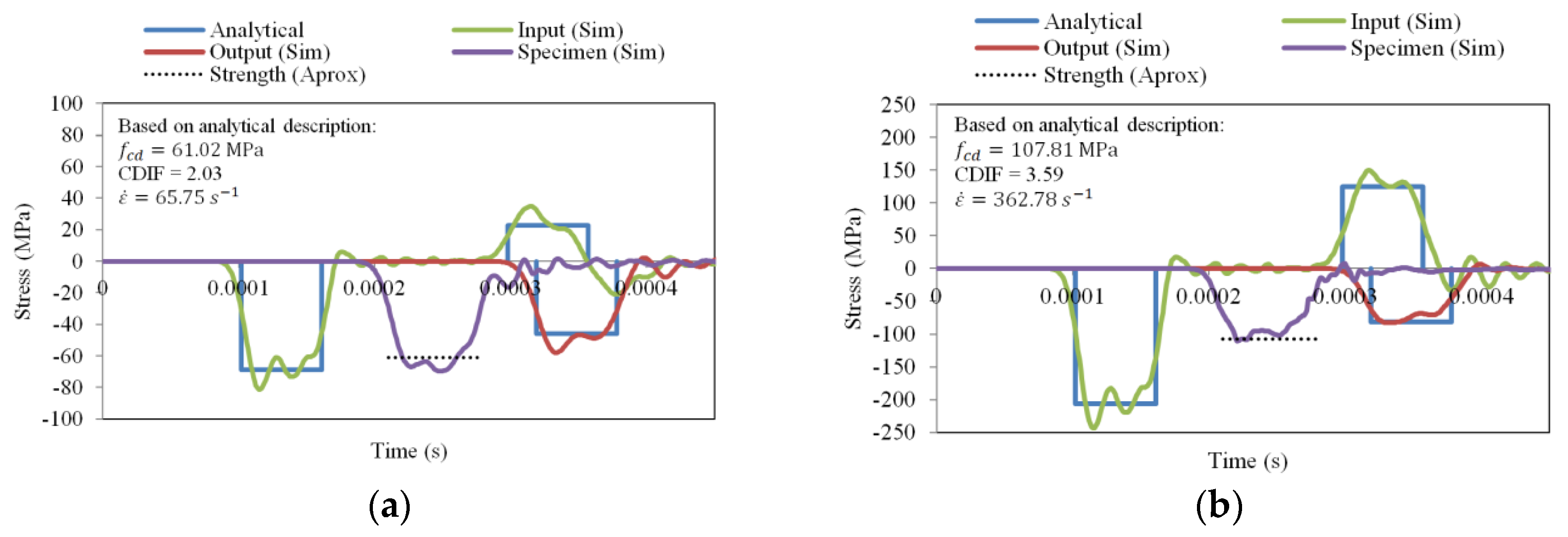
- An analytical solution to predicting stress and strain wave intensities was presented. This could be used to simplify the design process of SHPB and check consistency in further experimental test results.
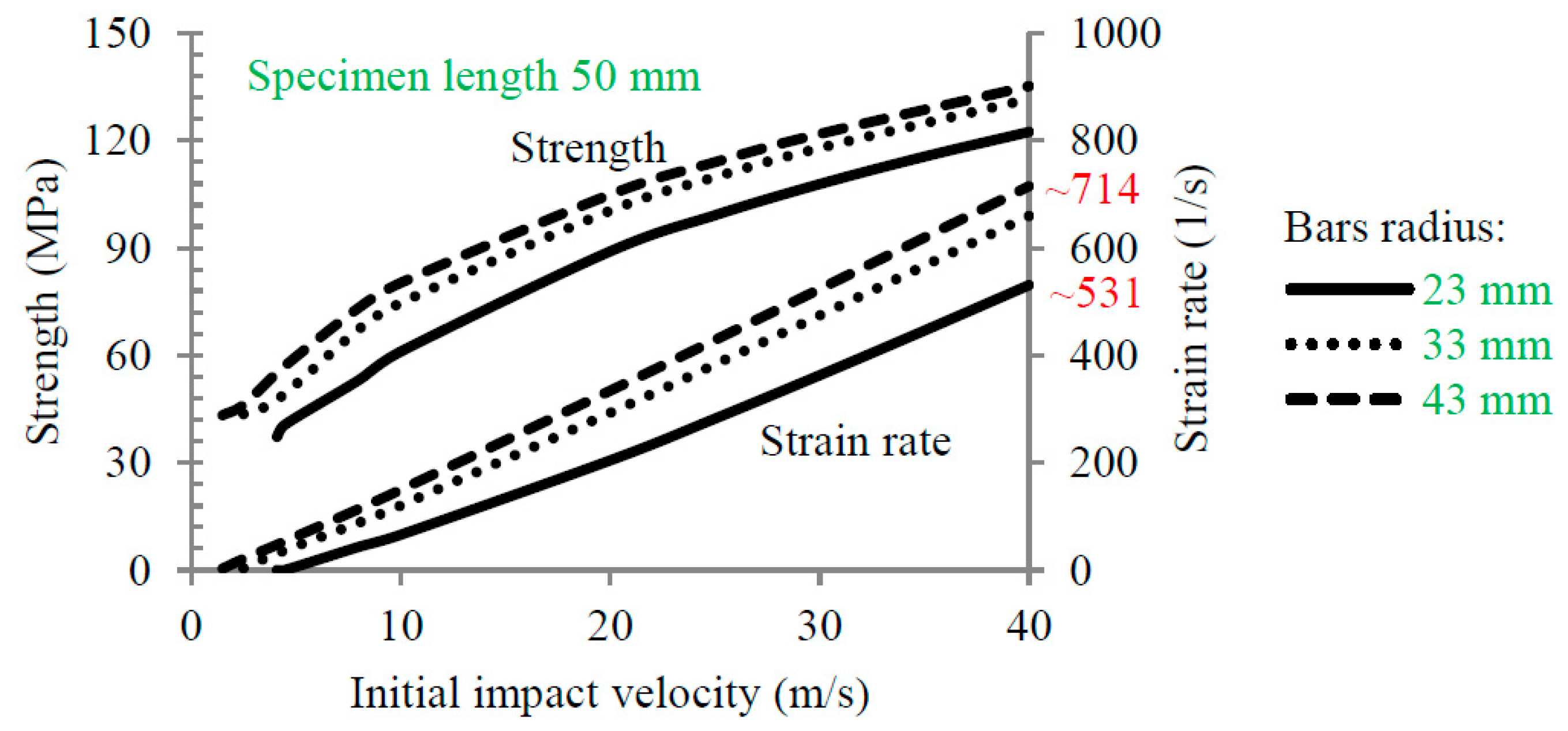
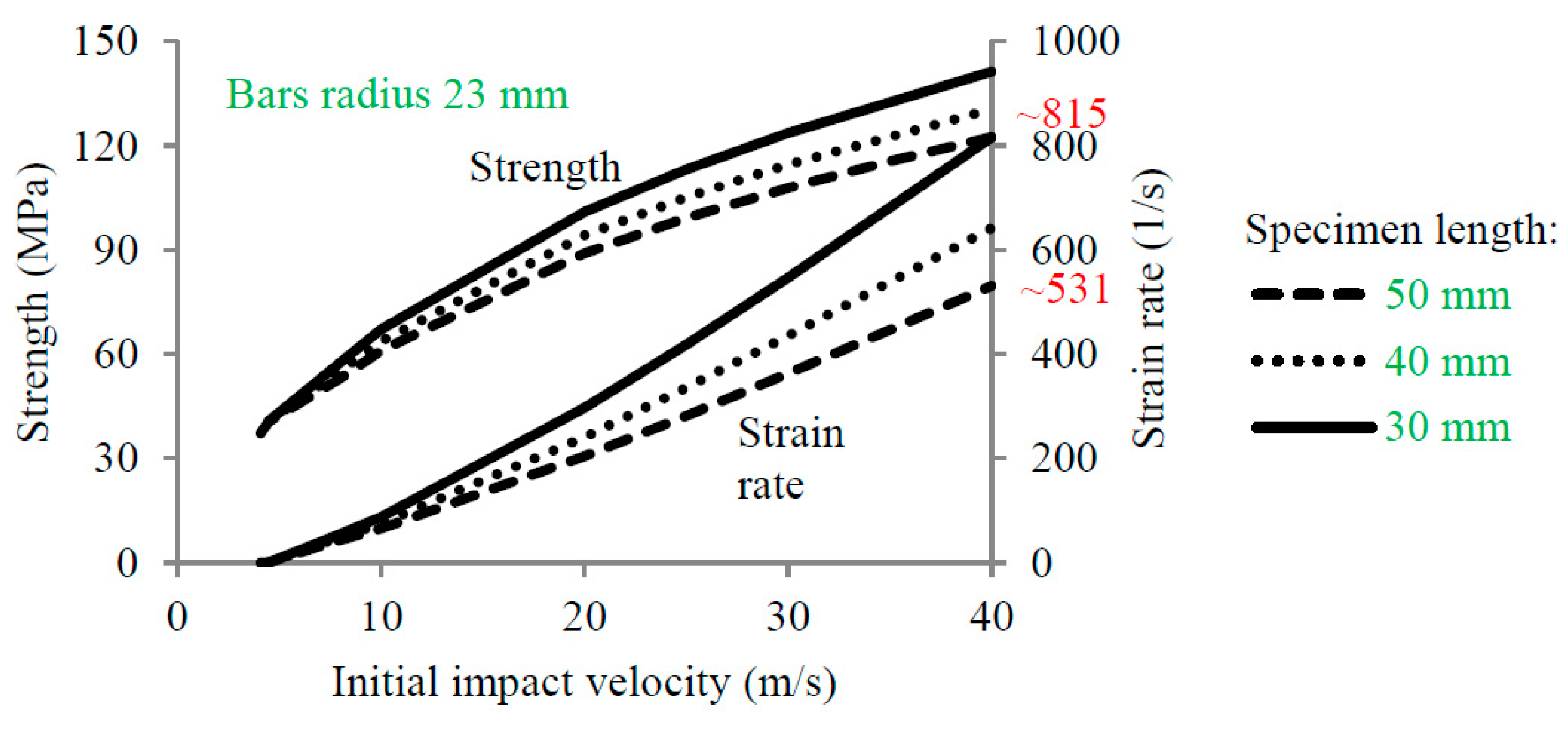
- The effect of the initial impact velocity of the projectile on the strength and strain rate reached in the specimen was determined for different bar diameters.
- A method to calibrate the material model for concrete including strain rate sensitivity was presented. A numerical simulation was used to find a correct value of the parameters that define the strain rate sensitivity. As discussed, the original parameters have very low values of dynamic strength for compressed concrete in comparison with the analytical solution.
- The presented analysis proved that the solution was not sensitive to mesh size. The important aspect is that possible changes in fracture energy during compression or the shape of the softening (descending) part of the curve can be identified using this experimental technique.
- This work assumes that the concrete specimen is in equilibrium during the simulations, and that the friction coefficient has limited influence on the final results.
Author Contributions
Conflicts of Interest
Appendix A
References
- Gebbeken, N.; Warnstedt, P.; Rüdiger, L. Blast protection in urban areas using protective plants. Int. J. Prot. Struct. 2017, 9, 226–247. [Google Scholar] [CrossRef]
- Hao, Y.; Zhang, X. Aspecial issue on protective structures against blast and impact loading. Int. J. Prot. Struct. 2018, 9, 3. [Google Scholar] [CrossRef]
- Sielicki, P.W.; Ślosarczyk, A.; Szulc, D. Concrete slab fragmentation after bullet impact: An experimental study. Int. J. Prot. Struct. 2019, 10, 380–389. [Google Scholar] [CrossRef]
- Abdel-Kader, M. Numerical predictions of the behaviour of plain concrete targets subjected to impact. Int. J. Prot. Struct. 2018, 9, 313–346. [Google Scholar] [CrossRef]
- Ramesh, K.T. High Rates and Impact Experiments. In Springer Handbook of Experimental Solid Mechanics; Sharpe, W.N.J., Ed.; Springer: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- Field, J.E. Review of experimental techniques for high rate deformation and shock studies. Int. J. Impact Eng. 2004, 30, 725–775. [Google Scholar] [CrossRef]
- Kolsky, H. An investigation of the mechanical properties of materials at very high rates of loading. Proc. Phys. Soc. Sect. B 1949, 12, 676–700. [Google Scholar] [CrossRef]
- Hopkinson, B. A method of measuring the pressure in the deformation of high explosives or by the impact of bullets. Philos. Trans. R. Soc. A 1914, 213, 437–456. [Google Scholar]
- Davies, R.M. A critical study of the Hopkinson pressure bar. Philos. Trans. R. Soc. A 1948, 240, 375–457. [Google Scholar]
- Li, Q.M.; Meng, H. About the dynamic strength enhancement of concrete-like materials in a split Hopkinson pressure bar test. Int. J. Solids Struct. 2003, 40, 343–360. [Google Scholar] [CrossRef]
- Jankowiak, T.; Rusinek, A.; Wood, P. Comments on paper: “Glass damage by impact spallation” by A. Nyoungue et al., Materials Science and Engineering A 407 (2005) 256–264. Mater. Sci. Eng. A 2013, 564, 206–212. [Google Scholar] [CrossRef]
- Yang, F.; Ma, H.; Jing, L.; Zhao, L.; Wang, Z. Dynamic compressive and splitting tensile tests on mortar using split Hopkinson pressure bar technique. Lat. Am. J. Solids Struct. 2015, 12, 730–746. [Google Scholar] [CrossRef]
- Piotrowska, E.; Forquin, P.; Malecot, Y. Experimental study of static and dynamic behavior of concrete under high confinement: Effect of coarse aggregate strength. Mech. Mater. 2016, 92, 164–174. [Google Scholar] [CrossRef]
- Mu, Z.C.; Dancygier, A.N.; Zhang, W.; Yankelevsky, D.Z. Revisiting the dynamic compressive behavior of concrete-like materials. Int. J. Impact Eng. 2012, 49, 91–102. [Google Scholar] [CrossRef]
- Kupfer, H.; Hilsdorf, H.K.; Rusch, H. Behavior of concrete under biaxial stresses. J. Am. Concr. Inst. 1969, 66, 656–666. [Google Scholar]
- Harding, J.; Wood, E.D.; Campbell, J.D. Tensile testing of material at impact rates of strain. J. Mech. Eng. Sci. 1960, 2, 88–96. [Google Scholar] [CrossRef]
- Subhash, G.; Ravichandran, G. Split-Hopkinson Pressure Bar Testing of ceramics. In ASM Handbook, Volume 08—Mechanical Testing and Evaluation; Kuhn, H., Medlin, D., Eds.; ASM International: Cleveland, OH, USA, 2000. [Google Scholar]
- Xia, K.; Yao, W. Dynamic rock tests using split Hopkinson (Kolsky) bar system—A review. J. Rock Mech. Geotech. Eng. 2015, 7, 27–59. [Google Scholar] [CrossRef] [Green Version]
- Baranowski, P.; Janiszewski, J.; Małachowski, J. Study on computational methods applied to modelling of pulse shaper in split—Hopkinson bar. Arch. Mech. 2014, 66, 429–452. [Google Scholar]
- Frew, D.J.; Forrestal, M.J.; Chen, W. Pulse shaping techniques for testing brittle materials with a split Hopkinson pressure bar. Exp. Mech. 2002, 42, 93–106. [Google Scholar] [CrossRef]
- Pająk, M.; Janiszewski, J.; Kruszka, L. Laboratory investigation on the influence of high compressive strain rates on the hybrid fibre reinforced self-compacting concrete. Constr. Build. Mater. 2019, 227, 116687. [Google Scholar] [CrossRef]
- Jankowiak, T.; Rusinek, A.; Łodygowski, T. Validation of the Klepaczko-Malinowski model for friction correction and recommendations on Split Hopkinson Pressure Bar. Finite Elem. Anal. Des. 2011, 47, 1191–1208. [Google Scholar] [CrossRef]
- Committee Euro-International du Beton (CEB). Concrete Structures under Impact and Impulsive Loading in: CEB Bulletin d’information; Committee Euro-International du Beton (CEB): Lausanne, France, 1988. [Google Scholar]
- Al-Salloum, Y.; Almusallam, T.; Ibrahim, S.M.; Abbas, H.; Alsayed, S. Rate dependent behavior and modeling of concrete based on SHPB experiments. Cem. Concr. Compos. 2015, 55, 34–44. [Google Scholar] [CrossRef]
- Bischoff, P.H.; Perry, S.H. Compressive behavior of concrete at high strain-rates. Mater. Struct. 1991, 24, 425–450. [Google Scholar] [CrossRef]
- Grote, D.L.; Park, S.W.; Zhou, M. Dynamic behavior of concrete at high strain-rates and pressures: I. Experimental characterization. Int. J. Impact Eng. 2001, 25, 869–886. [Google Scholar] [CrossRef]
- Katayama, M.; Itoh, M.; Tamura, S.; Beppu, M.; Ohno, T. Numerical analysis method for the RC and geological structures subjected to extreme loading by energetic materials. Int. J. Impact Eng. 2007, 34, 1546–1561. [Google Scholar] [CrossRef]
- Drugan, W.J.; Willis, J.R. A micromechanics-based nonlocal constitutive equation and estimates of representative volume element size for elastic composites. J. Mech. Phys. Solids 1996, 44, 497–524. [Google Scholar] [CrossRef]
- Gambin, B. Wpływ Mikrostruktury na Własności Kompozytów Sprężystych, Piezoelektrycznych i Termosprężystych; IPPT Reports on Fundamental Technological Research, 12; IPPT PAN: Warszawa, Poland, 2006; pp. 1–183. [Google Scholar]
- Livermore Software Technology Corporation. LS-DYNA Keyword User’s Manual, (LSTC); Livermore Software Technology Corporation: Livermore, CA, USA, 2019. [Google Scholar]
- Zhong, W.Z.; Rusinek, A.; Jankowiak, T.; Abed, F.; Bernier, R.; Sutter, G. Influence of interfacial friction and specimen configuration in Split Hopkinson Pressure Bar system. Tribol. Int. 2015, 90, 1–14. [Google Scholar] [CrossRef]
- Jankowiak, T.; Łodygowski, T. Smoothed particle hydrodynamics versus finite element method for blast impact. Bull. Pol. Acad. Sci. Tech. Sci. 2013, 61, 111–121. [Google Scholar] [CrossRef]
- U.S. Department of Transportation. User’s Manual for LS-DYNA Concrete Material Model 159, Public. Number FHWA-HRT-05-062; U.S. Department of Transportation: Washington, DC, USA, 2007.
- Jiang, H.; Zhao, J. Calibration of the continuous surface cap model for concrete. Finite Elem. Anal. Des. 2015, 97, 1–19. [Google Scholar] [CrossRef]
- Guo, Y.B.; Gao, G.F.; Jing, L.; Shim, V.P.W. Response of high-strength concrete to dynamic compressive loading. Int. J. Impact Eng. 2017, 108, 114–135. [Google Scholar] [CrossRef]
- Pajak, M.; Janiszewski, J.; Kruszka, L. Behavior of concrete reinforced with fibers from end-of-life tires under high compressive strain rates. Eng. Trans. 2019, 67, 119–131. [Google Scholar]
- Voyiadjis, G.Z.; Taqieddin, Z.N.; Kattan, P.I. Theoretical Formulation of a Coupled Elastic-Plastic Anisotropic Damage Model for Concrete using the Strain Energy Equivalence Concept. Int. J. Damage Mech. 2009, 18, 603–638. [Google Scholar] [CrossRef]
- Needleman, A. Material rate dependence and mesh sensitivity in localization problems. Comput. Methods Appl. Mech. Eng. 1988, 67, 69–85. [Google Scholar] [CrossRef]
- De Borst, R.; Sluys, L.J.; Muhlhaus, H.B.; Pamin, J. Fundamental issues in finite element analyses of localization of deformation. Eng. Comput. 1993, 2, 99–121. [Google Scholar] [CrossRef] [Green Version]
- Perzyna, P. The Thermodynamical Theory of Elasto-Yiscoplasticity (Review Paper). Eng. Trans. 2005, 53, 235–316. [Google Scholar]
- Abed, F.H.; Voyiadjis, G.Z. A consistent modified Zerilli–Armstrong flow stress model for BCC and FCC metals for elevated. Acta Mech. 2005, 175, 1–18. [Google Scholar] [CrossRef]
- Tejchman, J.; Gudehus, G. Shearing of a narrow granular strip with polar quantities. Int. J. Numer. Anal. Methods Geomech. 2001, 25, 1–18. [Google Scholar] [CrossRef]
- Pijaudier-Cabot, G.; Bažant, Z.; Tabbara, M. Comparison of various models for strain-softening. Eng. Comput. 1988, 5, 141–150. [Google Scholar] [CrossRef] [Green Version]
- Bobinski, J.; Tejchman, J. Modelling of size effects in concrete using elasto-plasticity with non-local softening. Arch. Civ. Eng. 2006, 52, 7–35. [Google Scholar]
- De Borst, R.; Pamin, J.; Geers, M. On coupled gradient dependent plasticity and damage theories with a view to localization analysis. Eur. J. Mech.—A/Solids 1999, 18, 939–962. [Google Scholar] [CrossRef]
- Pamin, J. Gradient plasticity and damage models: A short comparison. Comput. Mater. Sci. 2005, 32, 472–479. [Google Scholar] [CrossRef]
- Voyiadjis, G.Z.; Song, Y. Strain Gradient Continuum Plasticity Theories: Theoretical, Numerical and Experimental Investigations. Int. J. Plast. 2019, 55. [Google Scholar] [CrossRef]
- Voyiadjis, G.Z.; Song, Y. Effect of Passivation on Higher Order Gradient Plasticity Models for Non-proportional Loading: Energetic and Dissipative Gradient Components. Philos. Mag. Struct. Prop. Condensed Matter 2017, 97, 318–345. [Google Scholar] [CrossRef]
- Al-Rub, R.K.A.; Voyiadjis, G.Z. Gradient-enhanced Coupled Plasticity-anisotropic Damage Model for Concrete Fracture: Computational Aspects and Applications. Int. J. Damage Mech. 2009, 18, 115–154. [Google Scholar] [CrossRef]
- Cicekli, U.; Voyiadjis, G.Z.; Al-Rub, R.K.A. A Plasticity and Anisotropic Damage Model for Plain Concrete. Int. J. Plast. 2007, 23, 1874–1900. [Google Scholar] [CrossRef]
- Pietruszczak, S.; Mróz, Z. Finite element analysis of deformation of strain softening materials. Int. J. Numer. Methods Eng. 1981, 17, 327–334. [Google Scholar] [CrossRef]
- Melenk, J.; Babuska, I. The Partition of Unity Finite Element Method: Basic Theory and Applications. Comput. Methods Appl. Mech. Eng. 1996, 39, 289–314. [Google Scholar] [CrossRef] [Green Version]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Experimental Technique | Strain Rates in Metals (s−1) | Strain Rates in Brittle Materials (s−1) |
|---|---|---|
| Servo-hydraulic machines | 10−6 to 100 | |
| Specialized machines | 100 to 102 | |
| Conventional Kolsky bar | 102 to 104 | 101 to 103 |
| Miniaturized Kolsky bar | 104 to 105 | |
| Plate impact | 105 to 107 |
| Material | Value (Units) |
|---|---|
| Aluminum alloy | |
| Young’s modulus, | 70,000 (MPa) |
| Density, | 2700 (kg/m3) |
| Elastic wave speed, | 5091.8 (m/s) |
| Concrete C30/37 | |
| Young’s modulus, | 26,357 (MPa) |
| Density, | 2450 (kg/m3) |
| Elastic wave speed, | 3280.0 (m/s) |
| Part | Value (Units) |
|---|---|
| Bars and projectile | |
| Input and output bar length, | 1 (m) |
| Length of the projectile, | 0.15 (m) |
| Radius of the projectile and bars, | 0.023 (m) |
| Specimen | |
| Length of the specimen, | 0.05 (m) |
| Radius of the specimen, | 0.02 (m) |
| Parameter | Value (Units) |
|---|---|
| Articles [32,33] | |
| Fluidity in compression, | 0.0001003 (s−1) |
| Power in compression, | 0.78 (-) |
| Current analysis | |
| Fluidity in compression, | 0.00012 (s−1) |
| Power in compression, | 0.58 (-) |
| Examples | Parameter | Value (Units) |
|---|---|---|
| Example 1 (default) | Fracture energy in uniaxial compression, | 6.838 (MPa·mm) |
| Compressive shape softening parameter, | 100 (-) | |
| Example 2 | Fracture energy in uniaxial compression, | 3.419 (MPa·mm) |
| Compressive shape softening parameter, | 100 (-) | |
| Example 3 | Fracture energy in uniaxial compression, | 6.838 (MPa·mm) |
| Compressive shape softening parameter, | 10 (-) | |
| Example 4 | Fracture energy in uniaxial compression, | 3.419 (MPa·mm) |
| Compressive shape softening parameter, | 10 (-) |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jankowiak, T.; Rusinek, A.; Voyiadjis, G.Z. Modeling and Design of SHPB to Characterize Brittle Materials under Compression for High Strain Rates. Materials 2020, 13, 2191. https://doi.org/10.3390/ma13092191
Jankowiak T, Rusinek A, Voyiadjis GZ. Modeling and Design of SHPB to Characterize Brittle Materials under Compression for High Strain Rates. Materials. 2020; 13(9):2191. https://doi.org/10.3390/ma13092191
Chicago/Turabian StyleJankowiak, Tomasz, Alexis Rusinek, and George Z. Voyiadjis. 2020. "Modeling and Design of SHPB to Characterize Brittle Materials under Compression for High Strain Rates" Materials 13, no. 9: 2191. https://doi.org/10.3390/ma13092191