Nowadays a series of measurement techniques is available for on-site wind resource measurement ranging from point measurements performed at different heights using cup anemometers (
Figure 1) [
5] or ultrasonic sensors [
6] to profiling techniques like
sodar (
Figure 1) [
7,
8,
9] or
lidar [
10,
11,
12]. Until now, the overwhelming majority of measurement campaigns for commercial wind farms rely on cup anemometry and occasionally on ultrasonic sensors, where the latter is often preferred in research applications. Remote-sensing techniques like
sodar or
lidar are increasingly explored as a complementary approach, particularly in large wind farm projects where the profiling device can be conveniently relocated within the project area for an exploration of the wind resource at different sites, following an initial calibration period where the profiler is operated in conjunction with a conventional tower-based measurement system.
Figure 1.
Photographs of (a) a tower-based measurement system with three redundant sets of cup anemometers at three heights, (b) a sodar unit on a trailer and equipped with a photovoltaic power system.
2.1. Cup anemometry
A cup anemometer [
5,
6,
7,
8] is a simple device relying on the different aerodynamic drag of the convex and concave surfaces of a suitably designed cup. Typically two to four cups are mounted symmetrically on a vertical axis and allowed to rotate freely. If placed in a constant speed air stream, the anemometer will eventually spin at a frequency proportional to the wind speed. If coupled to a small electric synchronous generator, the corresponding electrical signal can be conveniently registered by data conditioning and logging. Generally, since only the frequency information of the signal is of interest, a signal forming device is required for processing in digital data loggers, as the amplitude of the signal inconveniently varies proportionally to the frequency. A common choice is to convert the analog signal into a train of fixed amplitude pulses which can be counted by the digital device.
The theory of operation can be illustrated easily in the case of a two-cup anemoter. Neglecting friction, the change in angular momentum
L is given by the accelerating torque
M caused by the different drag coefficients
Cd,v and
Cd,x, respectively [
5,
8]:
where
is the moment of inertia of the device,
is the rotational frequency,
A the projected area and
. Although the drag coefficient varies with the azimuthal angle
during one half-period of rotation, it is generally assumed that they can be replaced by average values, simplifying the analysis considerably. If the velocity ratio
and the drag ratio
are defined by
we have for the steady-state case:
i.e., the rotational frequency is proportional to the wind speed, where the proportionality constant is a function of the drag ratio. For typical values of the drag coefficients for the concave and convex surfaces of 1.4 and 0.4, respectively, the steady-state speed ratio is calculated to be 0.303,
i.e., the cups will rotate at about a third of the wind speed.
The equations above assumed the wind speed to be uniform horizontally. If a horizontal wind shear is considered, then corrections have to be applied to the apparent wind speeds at the concave and convex surface, respectively. As an example, we observed that a 0.2% asymmetry in the horizontal wind speed produces a 0.7% change in the steady-state speed ratio [
8]. Even though in free stream little asymmetry can be expected on the length scale given by the typical anemometer size (
R~0.1m), the proximity of the anemometer to the measurement tower and the influence of the mounting booms may well incur a sizeable change in the calibration factor of the anemometer, particularly if the booms are short and the cups are not properly separated from their mounting base.
In the above paragraphs we assumed a constant in-flow wind speed which is hardly ever encountered in field measurements. If dynamic variables of the wind field are of interest, such as the turbulent kinetic energy or gusts in wind speed, then the inertia of the anemometer has to be taken into account. The finite response time of the sensor will also have an impact on the average wind speed, particularly in turbulent environments. In order to explore the effect of changes in wind speed, we first observed that a generalization of Equation (1) can be put in the form [
5]
Generally, the last term can be neglected, allowing to obtain an analytical solution and evaluate the step response of the anemometer. If an initial wind speed of
U0 is assumed, changing abruptly to
U1=
U0 + Δ
U at a time
t = 0, then the change in wind speed as a function of time is given by [
5]
where the time constant is given by
In Equation (6) we have introduced the
distance constant La of the anemometer, which is only a property of the instrument itself and does not depend on the wind speed signal, as opposed to the time constant which is inversely proportional to the value of the final wind speed. In principle, the distance constant could be measured in a wind tunnel subjecting the anemometer to a step change, say from zero to a finite value of the wind speed. However, in practice, most of the increase in rotational frequency typically occurs during the first three full rotations, so the determination of
La from a fit of the experimental data to Equation (5) becomes very imprecise. Kristensen and Hansen [
5] proposed an alternative to compare the field response of the cup anemometer under observation with an ultrasonic anemometer, the time response of which is significantly faster than the one of the cup anemometer. The cup anemometer transfer function, determined theoretically as
can then be calculated from the ratio of the spectra measured by the cup and the sonic anemometer, respectively. For the research anemometer RISO P2546 a distant constant of
La = 1.8 m was found [
5]. A commercial anemometer may have larger values of up to about 3 m.
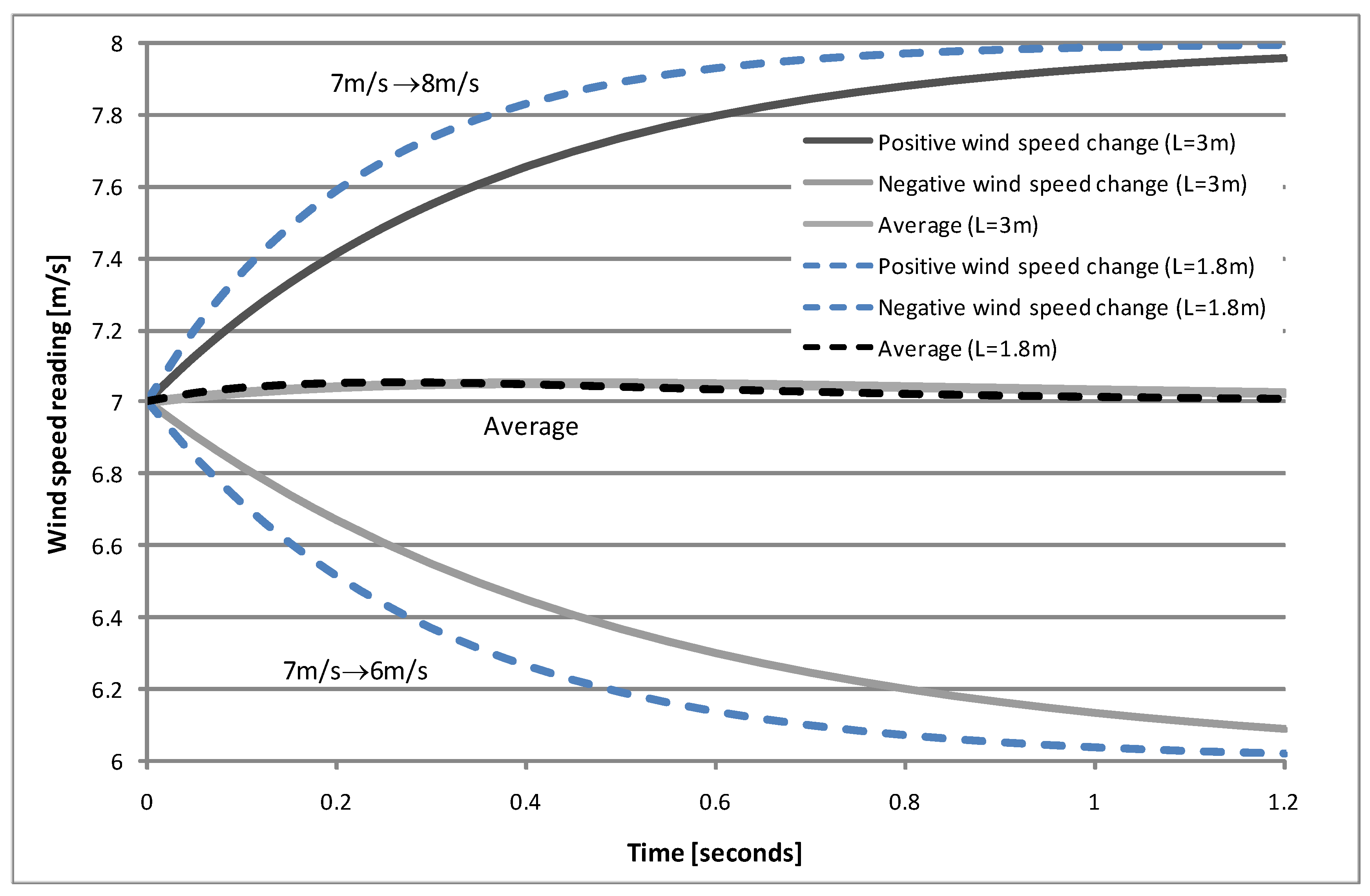
The fact that the time response of a cup anemometer is determined by a distance length rather than a time constant has a direct implication on the accuracy of the measurements under the typical fluctuating wind speed conditions. This point is illustrated in
Figure 2 where the step response of two anemometers, one with a distance constant of 1.8 m (typical of the RISO P2546) and another with a length of 3m (representative of commercial anemometers like the NRG #40 max often used for wind farm development), is shown for positive and negative wind speed changes. Although the two sets of curves look symmetric at first sight, averaging the curves reveals that the anemometer actually reacts faster to a positive rather than a negative wind speed change; this phenomenon is termed
overspeeding. In the case of
Figure 2, it can be seen that the maximum deviation of the average curve from the horizontal line is about 0.05 m/s for both curves. However, the average deviation is less then 0.03m/s for the anemometer with a distance constant of 1.8 m, where the 3m-anemometer has an average overspeeding during the 1.2s-interval shown in
Figure 2 of almost 0.04 m/s.
Figure 2.
Illustration of the different response of a cup anemometer for positive and negative wind speed changes, respectively, for two values of the distant constant (1.8 m and 3 m).
Figure 2.
Illustration of the different response of a cup anemometer for positive and negative wind speed changes, respectively, for two values of the distant constant (1.8 m and 3 m).
An important point to consider is anemometer calibration [
8]. While uncalibrated anemometers have been used for quite some time, e.g., the popular NRG #40 max anemometer, individual calibration is now the standard in the wind energy industry. The uncertainty of uncalibrated anemometers is due both to the error sources in the generic calibration procedure and the scatter between units caused by fluctuations in the production process. A typical uncertainty value of an uncalibrated anemometer is of the order of 1.4%, while individually calibrated anemometers may be expected to have an uncertainty of the order of 0.7%.
It should be noted, however, that calibration uncertainty is generally not the most important error source for the long-term estimation of the wind resource and turbine yield, respectively, at a given site. An appropriate mounting scheme [
8] providing near-free stream conditions for the anemometer under prevailing wind conditions is as important as the anemometer calibration. If possible, the highest anemometer on a measurement tower should be mounted on top of the tower and unobstructed by structural elements or lightning spikes. If this measurement does not occur at hub height (typically 80 m) but at a lower height, then the assessment of the hub height wind speed will rely on a vertical extrapolation requiring wind speed sensors at different heights (see
Section 3). This extrapolation procedure may cause an uncertainty of the same order as the calibration uncertainty, if the sensors at different heights are not mounted under identical exposure conditions. Tower wake effects (
Section 2.4) can be assessed by comparing records from two anemometers at the same level (generally the greatest height) and often cause a smaller uncertainty than anemometer calibration, due to the systematic nature of the wake effect. While other sources of uncertainty have to be considered in the course of a wind project feasibility study, the largest uncertainty generally comes from inter-annual variations of the local climatology (see
Section 4 on long-term assessment).
As opposed to ultrasonic sensors described in the following section, anemometers do not provide information about either wind direction or temperature, so they have to be complemented by corresponding sensors. Wind direction is generally measured by a vane, the direction of which is determined by a voltage divider. Temperature is often measured by integrated circuit sensors; a radiation shield is always indispensable to avoid heating by solar radiation. While the effect of atmospheric pressure on air density can generally be approximated by the value of the barometric formula for the given site altitude, the effect of temperature is more substantial; temperature measurements are therefore always part of a wind measurement campaign. Finally, relative humidity variations can often be neglected.
2.2. Ultrasonic sensors
Sonic anemometers [
7,
9,
10,
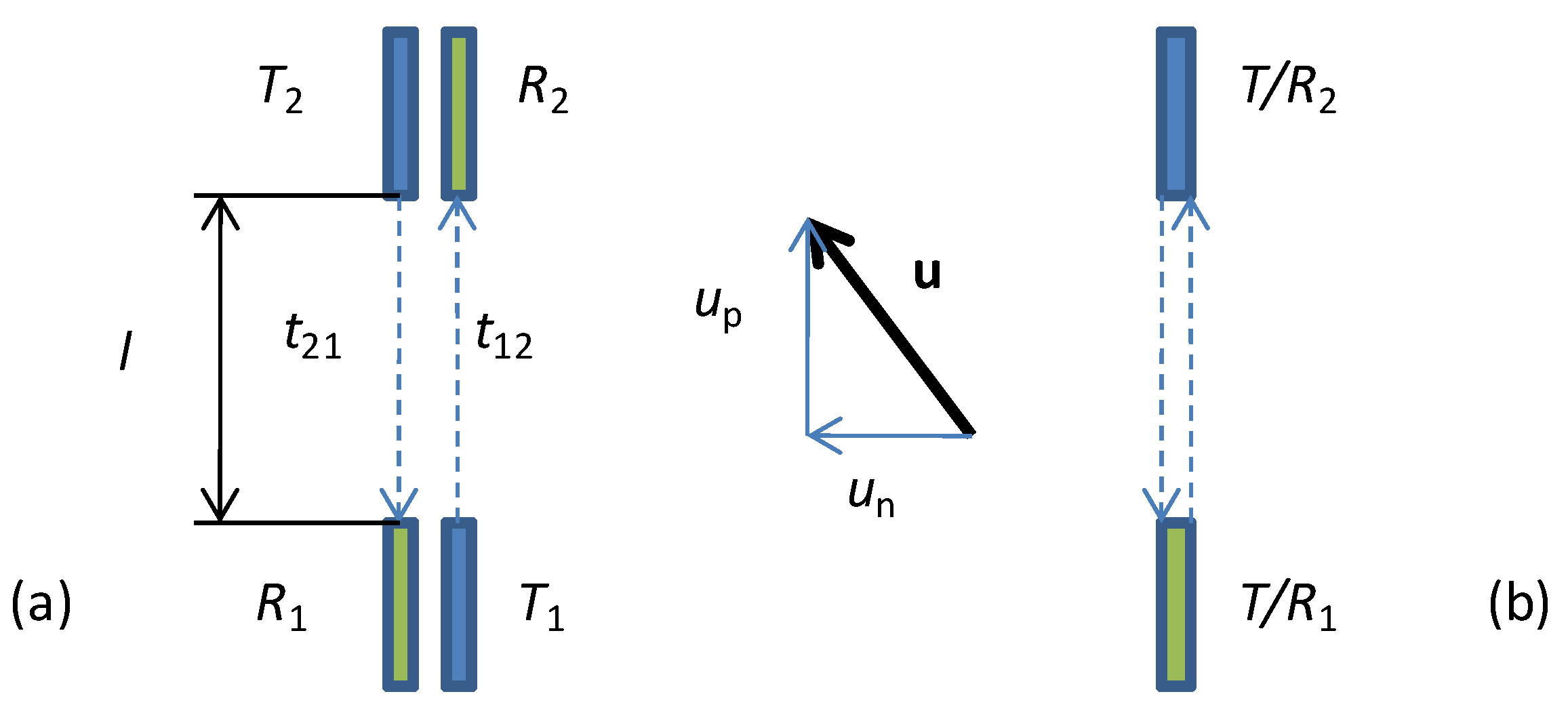
11] measure the wind speed in two or three dimensions based on a comparison of the times-of-flight of two anti-parallel sonic pulses. In modern sonic anemometers each measurement path consists of a pair of transducers, each of them capable of both transmitting and receiving. For a uniform and stationary wind field the wind velocity component in the direction of the measurement path can then be calculated from [
7,
9,
11]
where
t12 and
t21 are the flight times from transceiver 1 to 2 and vice versa, and
l is the distance between the transceivers; see
Figure 3. Two or three orthogonal measurement paths can be combined in one instrument, in order to measure the full wind velocity vector. In principle, sonic anemometers have a series of advantages over cup anemometers, such as the absence of moving parts, allowing a faster response to fluctuations and avoiding overspeeding. Furthermore, their response is linear over a large range of frequencies, and the measurement is relatively independent of the flow properties, such as spatial and time variations, temperature, density
etc. Finally, sonic anemometers are absolute instruments that do not require individual calibrations [
7]. Some drawbacks do exist, such as the influence of the finite measurement path, path separation, and transducer shadows.
Figure 3.
Geometry of ultrasonic transceiver arrangements (one measurement path). (a) Separate transmitters / receivers for each direction, (b) integrated transceiving units.
Figure 3.
Geometry of ultrasonic transceiver arrangements (one measurement path). (a) Separate transmitters / receivers for each direction, (b) integrated transceiving units.
In order to determine how the measured wind velocity component relates to the actual line-averaged wind speed along the measurement path we observe that the flight times
t12 and
t21 can be calculated from [
9,
11]
where
up(
p,
t) is the instantaneous wind speed at a position
p between the path extremes
p1 and
p2 at a time
t (see
Figure 3) Both pulses are assumed to have been fired simultaneously. If the wind is constant in space and time (
up(
p,
t) =
u), then equation (8) correctly predicts
uM =
u. In the case of a wind field varying in space and time, however, it can be expected that the fluctuations will contribute to the measured wind speed value. Using perturbation theory, Cuerva and Sanz-Andrés [
11] derive an expression for the measured wind speed in the general case of a fluctuating wind field:
where
ε measures the strength of the perturbation and
F+ and
F– account for the differences in traveling time:
P is the position within the measurement path normalized to the path length,
δ the relative variation of the wind speed and
T0± the travel times in either direction in the absence of the perturbation. As an example of the theory, Cuerva and Sanz-Andrés discuss the effect of an oscillating measurement mast in response to, e.g., vortex shedding. For an oscillating tower with an angular frequency
ω the relative measurement error is found to be
where
t0 is the time delay between the maximum of the oscillation and the pulse emission. Note that for typical values of the shedding frequency of a few Hz
, so that
is a second order small quantity. Moreover, for a random phase distribution for the vortex shedding process, the average of the cosine function will be zero for typical data logger averaging intervals in the range of 1 to 10 minutes.
In order to discuss the operation of sonic anemometers under realistic atmospheric conditions Cuerva and Sanz-Andrés first describe the fluctuating component of the wind speed by a Fourier‑Stieltjes integral [
11]
with a wave vector
k with components
k1,
k2, and
k3 in the three orthogonal directions of the wind velocity coordinate system. Ψ
ij(
k,t) are random functions which can be related to the spectral density tensor Φ
ij(
k) by
where
and
E(
k) is the three-dimensional spectrum which can be expressed as [
12]
provided an inertial sub-range exists in the wave-number range of interest. In order to relate the spectrum of the random fluctuations to measureable quantities, the so-called one-dimensional spectra for a given component, say
k1, can be obtained by integrating over the remaining coordinates:
This tensor is the Fourier transform of the velocity correlation tensor for separation in the longitudinal direction. It can now be calculated both for ideal conditions and considering the measurement conditions using the framework of Equations (16) and (17), in order to define a transfer function
Rij by setting
where
FijM is the one-dimensional spectrum determined for the wind velocity as measured by the sonic anemometer. If the special case of an alignment of the measurement path with one of the components of the wind velocity, say
x, is considered, then the corresponding transfer function
R11 can be calculated as follows [
11]
where
M∞ is the Mach number of the free-stream wind speed,
l the length of the measurement path as before, and Z
B is the non-dimensional delay time between pulse shots. For practical purposes,
R11 can be interpreted as a transfer function of the sonic anemometer [
11,
12], measuring the response of the instrument to a turbulent perturbation with wave number
k1.
As seen in
Figure 4, where the longitudinal transfer function
R11 has been plotted for different Mach numbers under the assumption of simultaneous emission of both measurement pulses, the influence of the Mach number on the instrument response is negligible for wind speeds in the interesting range, since even for a Mach number of 0.1 (equivalent to a wind speed of 34.5 m/s) the response function is essentially identical to the one for
M∞ = 0 (labeled as “Kaimal” in
Figure 4). Not unexpectedly, for very large wind speed values the finite speed of sound becomes a limiting factor, reducing the spatial frequencies that can be resolved with the instrument. The fact that often the two opposite sound pulses are fired in a sequential manner, which gives rise to a finite delay time, does have an important impact on the instrument response. This can be seen in
Figure 5, where the response function has been plotted for different values of the normalized delay time.
Figure 4.
Transfer function of a sonic anemometer for different Mach numbers as a function of the dimensionless spatial frequency k1l. The non-dimensional delay time is ZB = 0 for all curves.
Figure 4.
Transfer function of a sonic anemometer for different Mach numbers as a function of the dimensionless spatial frequency k1l. The non-dimensional delay time is ZB = 0 for all curves.
2.3. Sonic detection and ranging (SODAR)
While anemometers (both mechanical and sonic) measure wind velocity at a specific location in space, requiring the use of several instruments for the assessment of vertical profiles, remote sensing techniques are capable of providing an almost instantaneous photograph of the complete vertical wind velocity profile up to a certain height. One such technique, becoming increasingly popular in the wind energy industry, is
sodar (
sonic
detection
and
ranging) [
13,
14,
15,
16,
17].
sodar was originally developed for atmospheric research [
13,
14,
15] and air traffic safety but is increasingly deployed where a knowledge of the wind velocity profile up to greater heights than provided by anemometer towers (generally limited to 60 m or 80 m) is required, or the assessment of different locations within a vast wind project development is desirable. Commercially available systems tailored for wind resource assessment are capable of providing information on the atmospheric boundary layer up to heights of 200 m or 300 m, thereby covering the full range of heights swept by typical rotor blades. This type of information is particularly useful when dynamic structural analysis of the turbine rotor is performed, since both wind shear over the rotor diameter and the evolution of turbulence with height significantly impact on the prediction of rotor stress, and their precise knowledge avoids the use of sometimes oversimplifying assumptions.
Figure 5.
Transfer function of a sonic anemometer as a function of the dimensionless spatial frequency k1l for different normalized delay times. M∞ = 0.1 except for the Kaimal case (M∞ = 0) shown for reference purposes.
Figure 5.
Transfer function of a sonic anemometer as a function of the dimensionless spatial frequency k1l for different normalized delay times. M∞ = 0.1 except for the Kaimal case (M∞ = 0) shown for reference purposes.
The measurement principle of
sodar relies on the backscattering of an audible sonic beam at a given frequency (typically in the range from 2000 to 4500 Hz) from inhomogeneities within the atmosphere and the detection of a slight frequency change caused by the moving scatter volume on account of the Doppler effect [
16]. Since first-order modifications of the carrier frequency only occur in the direction of the beam, three independent beams are required to determine the velocity components in the vertical and two horizontal directions. While the vertical component can be determined by sending a beam straight up into the atmosphere, the determination of the horizontal components (generally priority for wind resource assessment) requires the corresponding beams to be tilted. If (
u,
v,
w) are used to denominate the
x,
y, and
z components of the wind velocity, respectively,
S denotes the speed of sound,
f0 the frequency at which the sonic beam is emitted and Δ
f the frequency shift registered upon receiving the backscattered signal, then the following relationships hold [
16]:
θ x and
θ y are the tilt angles for the
x- and
y-beams respectively. The power levels of the backscattered signals are very low, as can be seen from the following equation, termed the
sodar equation [
18]:
where
PR and
PT are the receive and transmit power, respectively,
G is the antenna transmit efficiency,
Ae the effective receive area,
σs the cross section for turbulent scattering of sound in air per unit volume and unit solid angle,
c the speed of sound,
τ the pulse length,
α the sound absorption coefficient and
z the measurement height. The scattering cross section can be calculated from [
19]
where
CT2 is the structure function coefficient for temperature fluctuations defined as [
20]
Θ is the potential temperature, i.e., the temperature a volume of air at temperature T would have if expanded adiabatically to standard pressure (100 kPa). r and r + r0 are the position vectors of two locations in the atmospheric boundary layer and the temperature structure function is assumed to depend only on the difference vector r of the two positions.
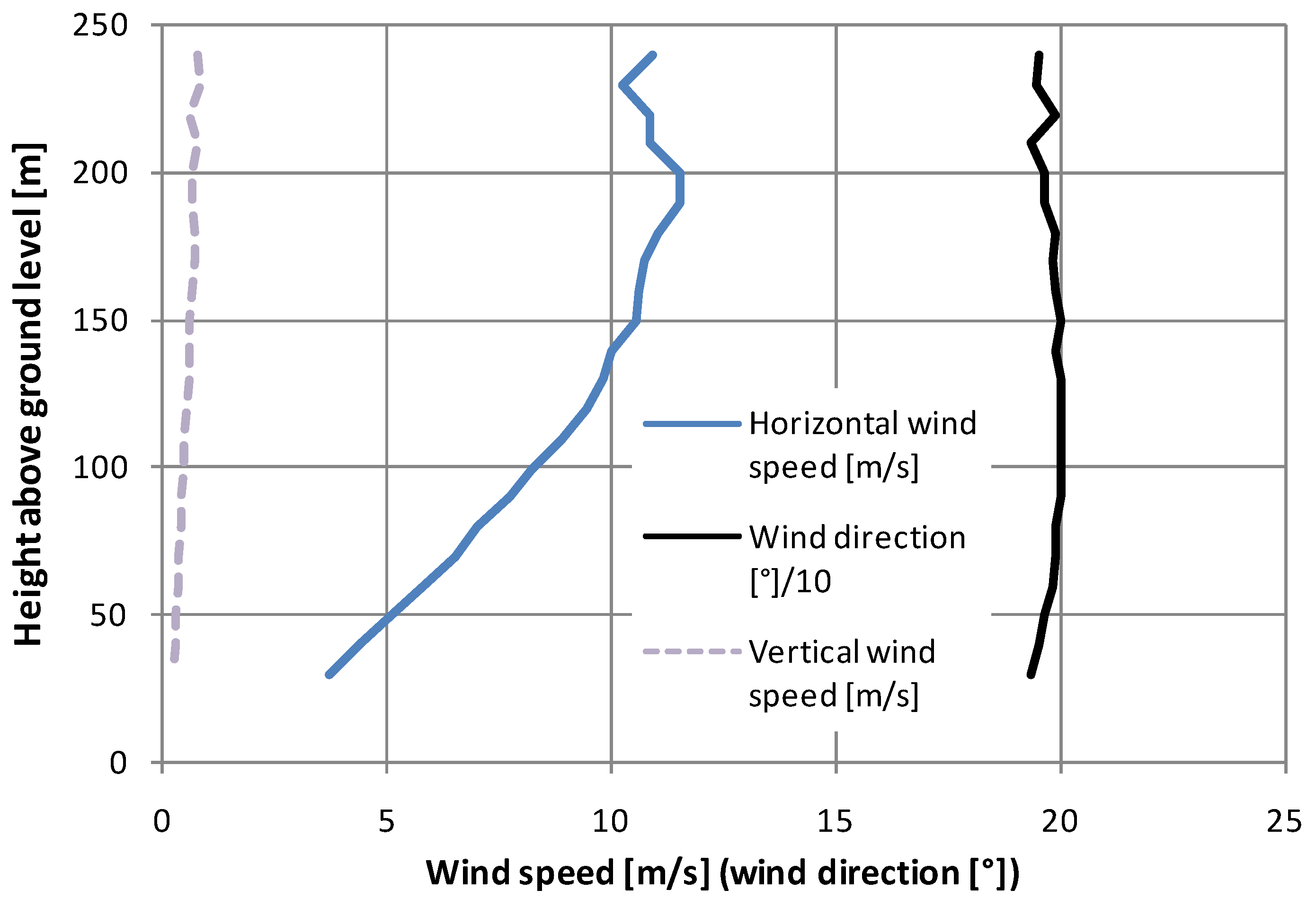
As illustrated in
Figure 6, commercial sodar units designed for wind energy applications are capable of obtaining reliable wind speed and direction readings for heights of up to 250 m, well beyond the maximum height swept by the rotor blades; the measurements shown were obtained with an Atmospheric Research and Technology (ART) Model VT-1 unit. It is conspicuous, from the example, how significant deviations from the logarithmic profile can occur well below the height of the atmospheric boundary layer; such measurements therefore provide useful input for the calculation of the effective rotor-averaged wind speed and the mechanical stresses occurring in the rotor blades. In
Figure 7 a comparison is shown between the readings of a cup anemometer at 54 m height and the sodar vector wind speed obtained for 50 m at an unobstructed flat site, demonstrating the excellent correlation between the two.
Figure 6.
Vertical wind speed and direction profiles as measured with a single frequency three-beam sodar device.
Data courtesy of Atmospheric Research and Technology, Inc. [
21].
Figure 6.
Vertical wind speed and direction profiles as measured with a single frequency three-beam sodar device.
Data courtesy of Atmospheric Research and Technology, Inc. [
21].
Figure 7.
Scatter plot showing the correlation of the sodar-measured (vector) wind speed at 50 m and the anemometer-measured (scalar) wind speed at 54 m above ground level.
Courtesy of Atmospheric Research and Technology, Inc. Reproduced with permission [
21].
Figure 7.
Scatter plot showing the correlation of the sodar-measured (vector) wind speed at 50 m and the anemometer-measured (scalar) wind speed at 54 m above ground level.
Courtesy of Atmospheric Research and Technology, Inc. Reproduced with permission [
21].
In several studies the application of
sodar for wind speed measurements has been discussed [
23,
24,
25,
26]. The general approach is to correlate the
sodar data to concurrent tower data recorded at a site close enough to the
sodar location to make sure the same wind field is probed. On the other hand, one has to allow for a certain distance between tower and
sodar to avoid static echo interference stemming from reflections of the
sodar beam at the tower structure, even when the
sodar beams are pointing away from the tower. While the manufacturers recommend that any significant obstacle should be seen by the
sodar at an angle of 45° or less, in our experience the minimum distance should be closer to two obstacle heights in order to avoid anomalous wind shear readings indicative of echo effects. In general, the key to a successful utilization of
sodar for wind resource assessment lies with the appropriate filtering of the raw data, since the
sodar signal is easily affected by background noise and echo signals due to reflections from static obstacles, simulating a zero wind speed event occurring at a height equivalent to the round-trip travel time of the
sodar beam. Background noise issues can often be dealt with satisfactorily by establishing data rejection criteria based on minimum values of signal amplitude and/or signal-to-noise ratio. While reflections from hard surfaces are detected relatively easily with the echo rejection algorithms implemented in commercial
sodar devices, reflections from softer surfaces such as vegetation, hills and low buildings are more subtle to detect. Since clutter affects lower range gate data more strongly, they also have an adverse effect on the determination of wind shear, if not properly accounted for [
25]. A pragmatic approach, recommended by
sodar manufacturer ART, is to use a short (6 m) pole with a conventional anemometer, the readings of which can be correlated to the
sodar readings for quality control when no external mast is available [
24].
2.4. Light detection and ranging (lidar)
Much like
sodar, modern
lidar (
light
detection
and
ranging) devices designed for wind energy purposes rely on the detection and frequency analysis of backscattered waves [
27,
28,
29]. As in
sodar, the wind velocity component along with the observation direction is obtained through a Fast Fourier Transformation (FFT) of a Doppler-shifted signal. However, instead of sound waves laser beams are used and backscattering is caused by interaction with particles (aerosols) and molecules in the atmosphere instead of density fluctuations as in the case of
sodar. Scattering mechanisms include molecular processes such as Rayleigh (elastic) and Raman (inelastic) scattering, with Rayleigh scattering being by far the dominant process. Interaction with particles is also known as Mie scattering. For eye safety, commercial units use infrared laser light at a wavelength of 1.55 μm [
27].
In order to obtain the three vector components of the wind velocity, the laser beam has to be inclined at an angle θ with respect to the normal, much like in sodar units. As opposed to sodar, however, where beam steering relies on phase shifts between the speaker units contained in the antenna, requiring a relatively complex electronic control scheme, laser beams can be easily rotated by means of a rotating wedge, in order to acquire redundant information by performing a full 360° scan around the vertical axis.
The line-of-sight velocity component obtained from the Doppler shift of the laser frequency then becomes a function of the azimuth angle
φ with the general form [
27]
where the parameters
a,
b, and
c can be obtained from a non-linear least-square fit to the experimental data. From the geometry of the arrangement we can then calculate the wind velocity components according to
where a 180° wind bearing ambiguity can occur in the case of a poor fit of Equation (28) to the data. In this case, an additional wind direction sensor used in conjunction with the
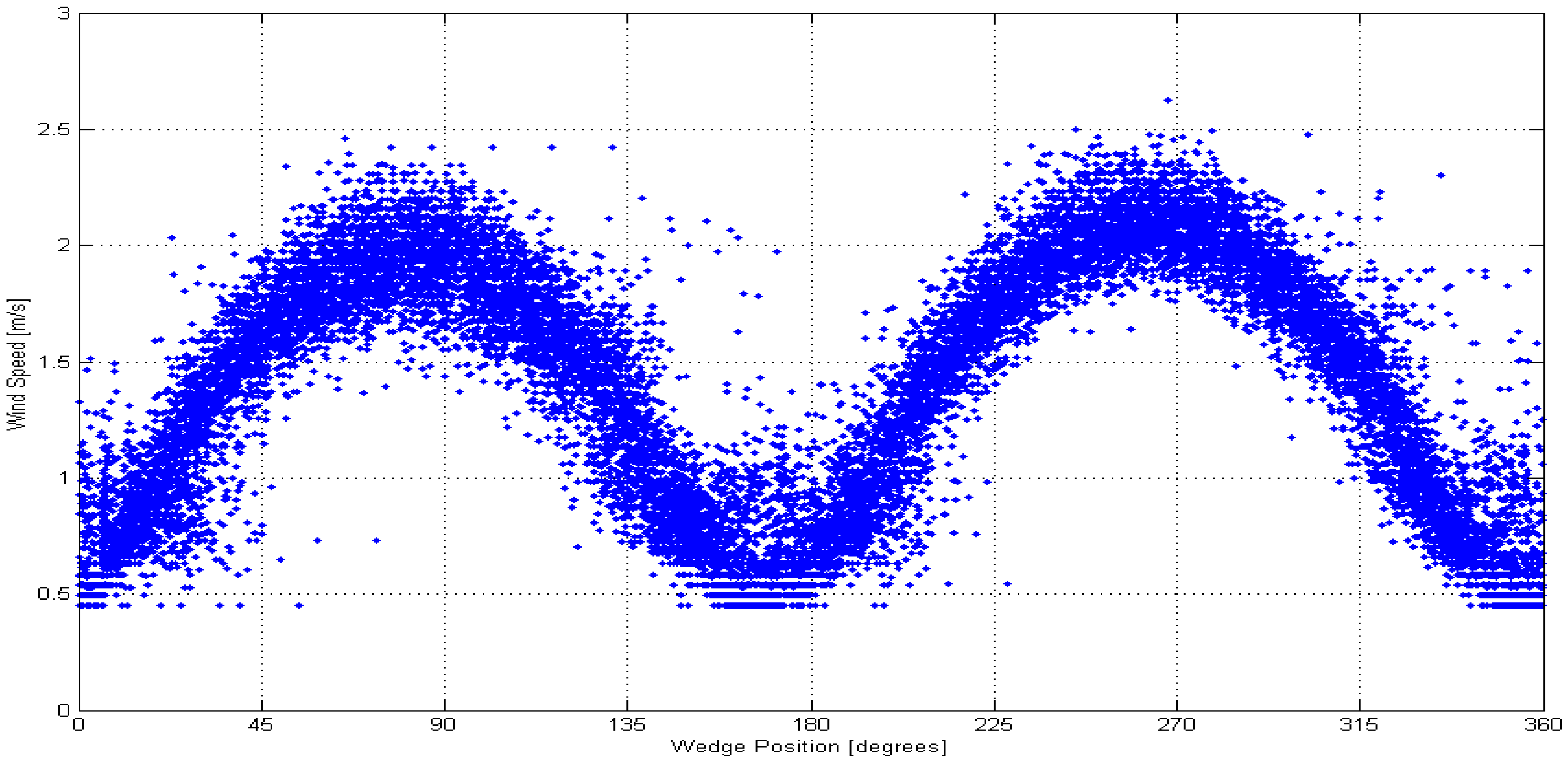
lidar unit can be used to resolve this ambiguity. An example of the azimuthal variation of the line-of-sight velocity is shown in
Figure 8 [
30].
Figure 8.
Line-of-sight velocity determined with a
lidar unit as a function of the azimuth angle [
30].
Reproduced with permission [
31].
Figure 8.
Line-of-sight velocity determined with a
lidar unit as a function of the azimuth angle [
30].
Reproduced with permission [
31].
Much like sodar,
lidar requires a finite angle
θ in order to obtain a reliable reading for the horizontal wind velocity component; in the case of the commercial unit ZephIR [
27] an angle of
θ = 30° is used. A natural consequence of this arrangement are significant volume averaging effects, with increasing volumes at higher sampling heights. As opposed to
sodar where the beam sample different and often disjunct volumes, the averaging process at a
lidar unit covers a 360° azimuthal range, so all three wind velocity components belong to the same averaging volume.
In spite of the large averaging volumes, published comparisons of
lidar measurements with tower‑based anemometer measurements generally find a high degree of correlation (
R2 = 0.95 and higher), with better correlations for wind speed averages than for their standard deviations. Jaynes
et al. [
27] find the correlations are limited more by uncertainty sources at the reference tower than at the
lidar, where most of the error sources could be traced back to interference with the tower structure. Due to encouraging initial experiences and despite its relatively high cost it can be expected that
lidar units will play an increasingly important role for wind resource assessment and wind turbine performance certification.
The major obstacle for a more widespread utilization of LIDAR units for routine wind resource assessment is currently the high cost of the units (typically priced at around US$150,000), compared to US$50,000 for common SODAR units and some US$25,000 for an instrumented 60 m tower. Due to the high price of lidar units, leasing units for special purpose campaigns is a suitable commercial alternative pursued by some providers. One possible application could be comparative studies, where the unit is placed at a prospective location for a limited period of time (1–3 months) and the long-term wind resource is determined through correlations with a near-by anemometry tower. Another useful applications include turbine certification campaigns under the IEC 61400-12 standard. In the long run lidar units can be expected to play a major role in routine wind resource assessment.
2.5. Tower shading effects
When wind speed measurement instruments are mounted on a tower, they are inevitably affected to some degree by flow distortion [
8,
32]. The minimization of such effects therefore requires a certain knowledge of the general flow characteristics around the tower, apart from common-sense guidelines as to the mounting of the measurement devices. Two general types of towers are commonly used: (1) Tubular towers with tower diameters in the 20–25 cm range (for typical heights of 60 m), (2) lattice towers with either triangular or square sections and similar diameters as in the case of tubular towers. Tubular towers are suitable for erection by up-tilting by means of a ginpole and therefore do not require staff with tower climbing skills. Lattice towers are often an appropriate solution in places where an antenna construction and installation industry (generally for telecommunications applications such as radio and cellular telephony) exists.
The effect of the tower on the distortion of the flow field can be modeled by computational fluid dynamics (CFD) techniques, where, in the case of lattice towers, it is necessary to combine Navier‑Stokes modeling with actuator disk models representing the drag effects induced by the tower [
8,
9]. Hansen and Pederson [
9] have pursued such a combined approach by modeling the effect of the lattice tower by volume forces acting on the three main cylindrical tubes and the smaller connecting tubes and verifying that the momentum deficit of the air equals the specified total force on the tower section. The general findings of such simulations are similar for both tower types, but differ in some specific aspects. One example is the angular position, where the least flow distortion is observed which is about 45° with respect to the wind direction in the case of tubular towers, but almost 90° for lattice towers [
8]. In case a fairly unidirectional wind flow pattern exists at the measurement site, these angular positions may be the recommended ones, as opposed to the commonly chosen position where the anemometers face the prevailing wind. Evidently, the effect of flow distortion is a function of the distance, so that tower effects can be minimized if mounting booms with suitable lengths are used. If the case of the upwind placement of the anemometer is considered, expressions can be derived in order to design the mounting boom for a given type of tower. In the case of lattice towers, the following empirical relationship, based on combined Navier-Stokes/actuator disk model [
9] results, has been proposed for the center-line upwind velocity deficit [
8]:
where
CT is the drag coefficient (dependent on both construction type and porosity of the towers),
L is the horizontal tower face width, and
R is the distance from the geometrical center of the tower. Expressions for
CT can be obtained from national building codes, such as the Danish wind loading code [
8], where the following expression has been proposed:
where
p is the porosity defined by the ratio of the projected area of all structural elements and the overall exposed area and
fgeo is a drag factor taken as 4.4 for towers with square plane sections and sharp edges, 2.6 for square towers with round edges and 2.1 for triangular towers with round edges. Considering a conservative (high) value of
CT = 0.6 and also a conservative value of
L/
R = 0.2 (
i.e., corresponding to a boom length five times the face width of the tower) an upwind center-line velocity deficit of about 1.2% is obtained.
Tubular towers, not unexpectedly, show higher velocity deficits at typical distances and do not display a linear behavior as a function of the corresponding distance parameters, taken in this case as d/R, where d is the tower diameter. For a value of CT = 0.6 (calculated in this case directly from the Navier-Stokes equations) and a normalized inverse distance of d/R = 0.2 a velocity deficit of 1.6% is obtained.
In situations where the anemometer is directly in the wake of the measurement tower, a major impact on wind speed readings is almost inevitable, since the wake typically extends 10–20 diameters downstream making a mounting of the anemometer at a safe distance difficult. Fortunately, the wake is normally confined to a small angular range so that most readings are not affected by tower shading, especially at sites where a more or less well defined prevailing wind direction exists. CFD simulations [
8] indicate that the wake behind a lattice tower has a width comparable to the face width
L introduced earlier, whereas, in the case of a tubular tower, the wake width is of the order of three tower diameters for distances greater than about three tower diameters. As a consequence, for mountings with relatively short booms (say,
L/
R =
d/
R = 0.2), the CFD simulations predict a full width of the angular sector affected by tower shading effects of the order of 10° in the case of lattice towers and about 30° for tubular towers. If the length of the mounting boom is doubled (
L/
R =
d/
R = 0.1) the full width of the affected angular sector is now about 6° for lattice towers and 17° for tubular towers.
Figure 9.
Ratio of wind speed readings recorded by a pair of anemometers mounted on a lattice tower. The continuous line represents bin-averages for a bin width of 10°. Error bars correspond to ± one standard deviation.
Figure 9.
Ratio of wind speed readings recorded by a pair of anemometers mounted on a lattice tower. The continuous line represents bin-averages for a bin width of 10°. Error bars correspond to ± one standard deviation.
As a consequence, it is a common practice to use two anemometers at a given height above ground level and compare their readings as a function of wind direction. To reduce costs, this analysis is often limited to the highest anemometer level, typically at 60 m. The first or main anemometer should be oriented in such a way that wake effects are avoided most of the time. The limited fraction of the total measurement time during which the main anemometer does suffer from tower shading effects can then be replaced by the second anemometer readings which at that time should be unaffected by wake losses.
An example of tower wake effects is shown in
Figure 9 where the ratio of the wind speed readings of two anemometers mounted at 80 m above ground level has been plotted as a function of the readings of the wind direction sensor. The main sensor (channel 1) has been mounted at 240° with respect to true north, whereas the second or redundant anemometer (channel 2) is at 0°. Clearly, the wind speed ratio reflects substantially higher readings of the main sensor at 180° (when the redundant anemometer is in the tower wake) and lower values at 60° (when the main wind speed sensor is in the wake). It can be seen from the figure that tower effects are not necessarily symmetric and reflect to some extent the characteristics of the wind pattern at the site. In the present case, the prevailing wind is from the south, so that the two peaks in the figure have very different associated statistics. Moreover, it should be noted that the angular width of the wake zone is greater than expected from the Navier-Stokes/actuator disk modeling with two angular sectors of 10° width affected at both wind directions showing wake effects. This is not completely unexpected since the CFD model given in [
8] only considers a head-on interaction with the actuator disk and angular variations of the effective drag coefficient (as caused by a variation in the apparent porosity of the lattice structure as a function of wind direction) are not accounted for.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}















