

Performance Analysis of Different Optimization Algorithms for MPPT Control Techniques under Complex Partial Shading Conditions in PV Systems


Abstract
:1. Introduction
2. Materials and Methods
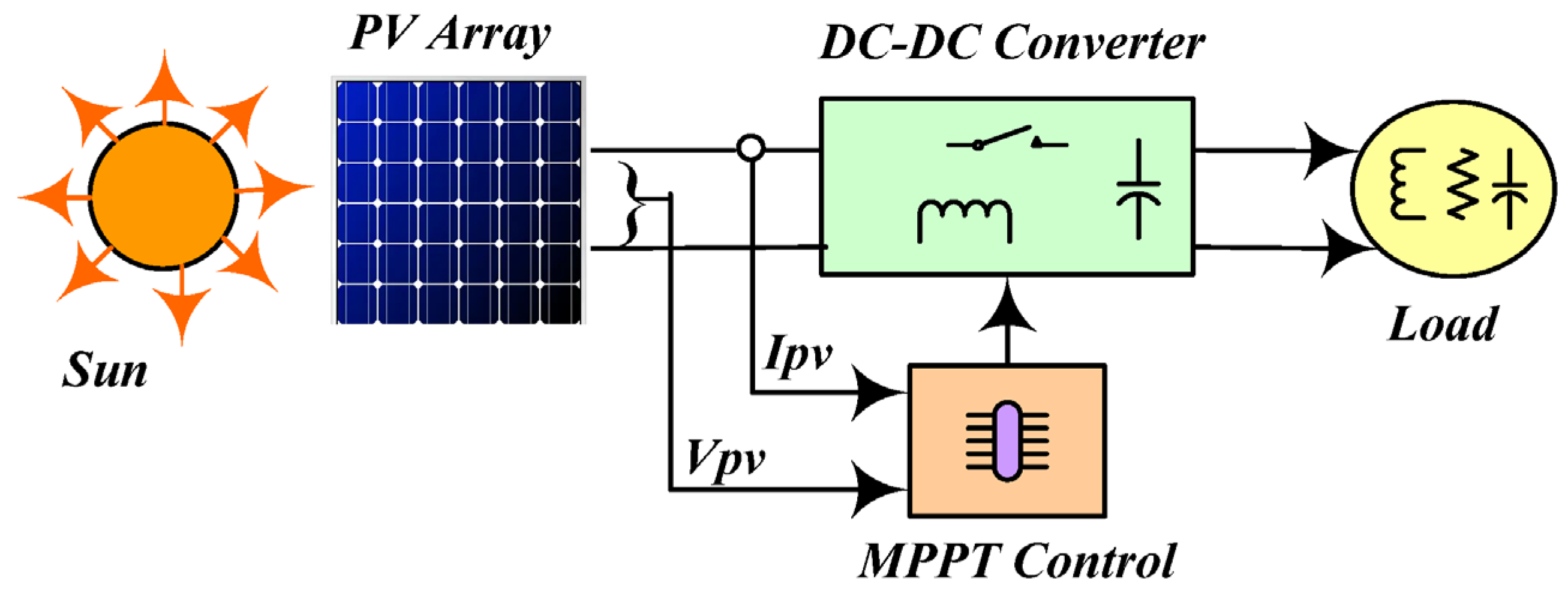
2.1. Renewable PV Energy Systems
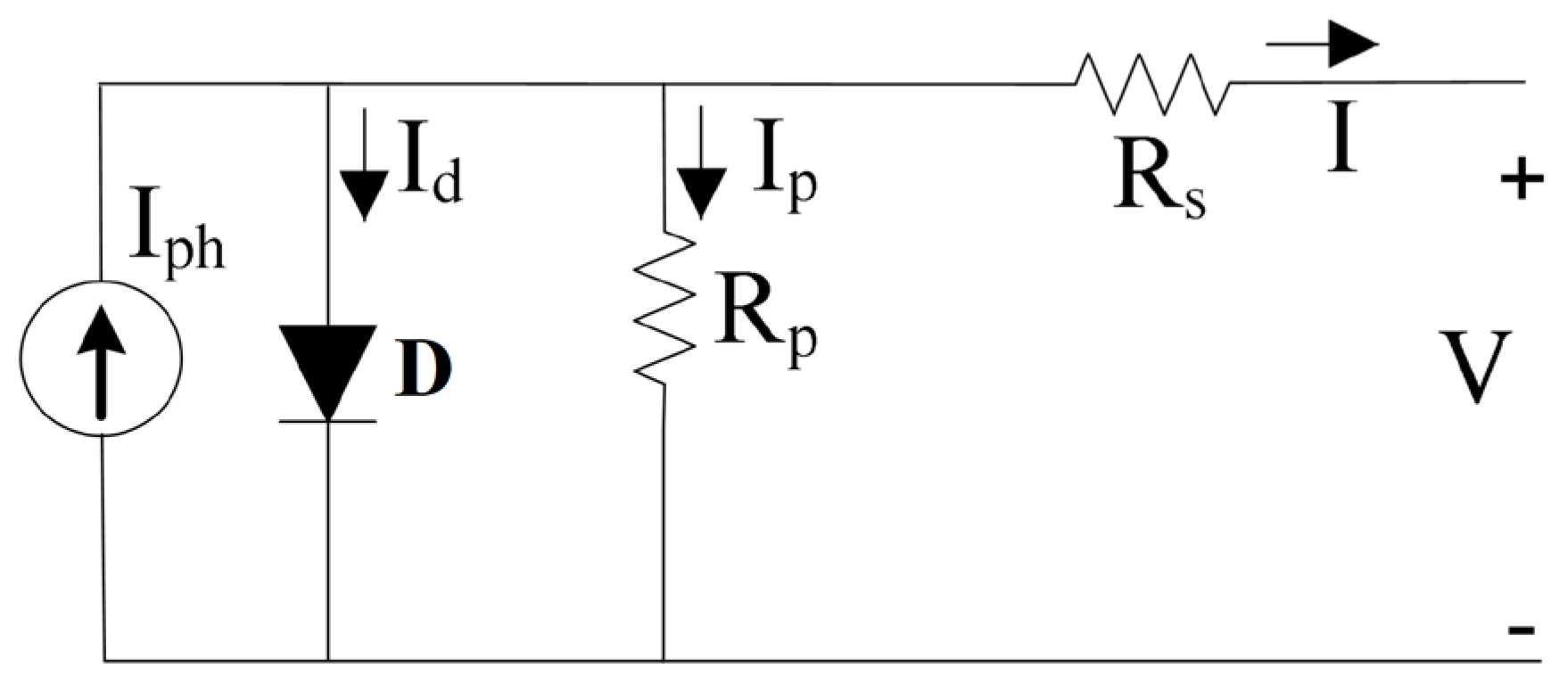
2.1.1. PV Cell Modelling
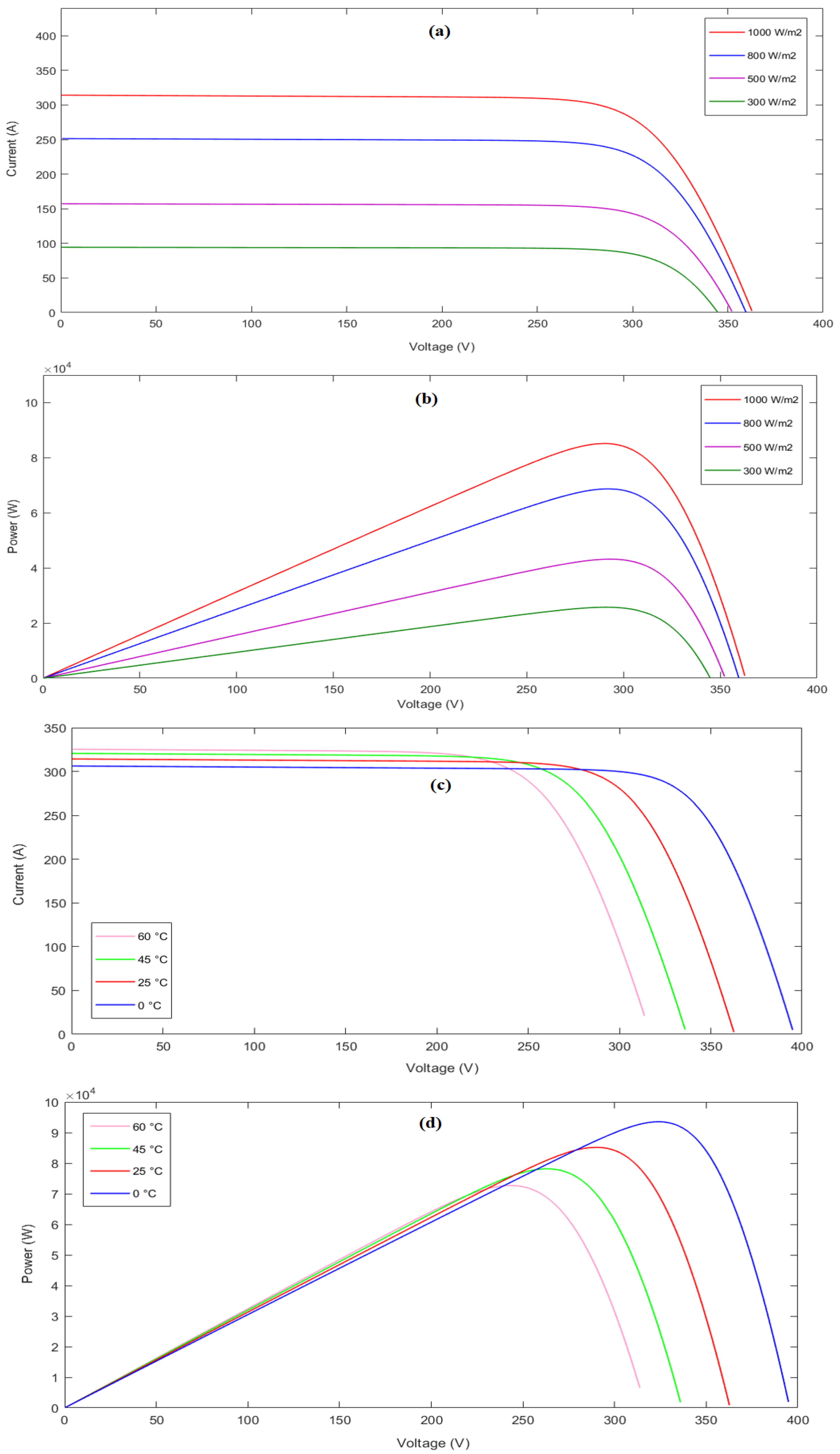
2.1.2. PV Energy Systems under Different Irradiation and Temperature Conditions
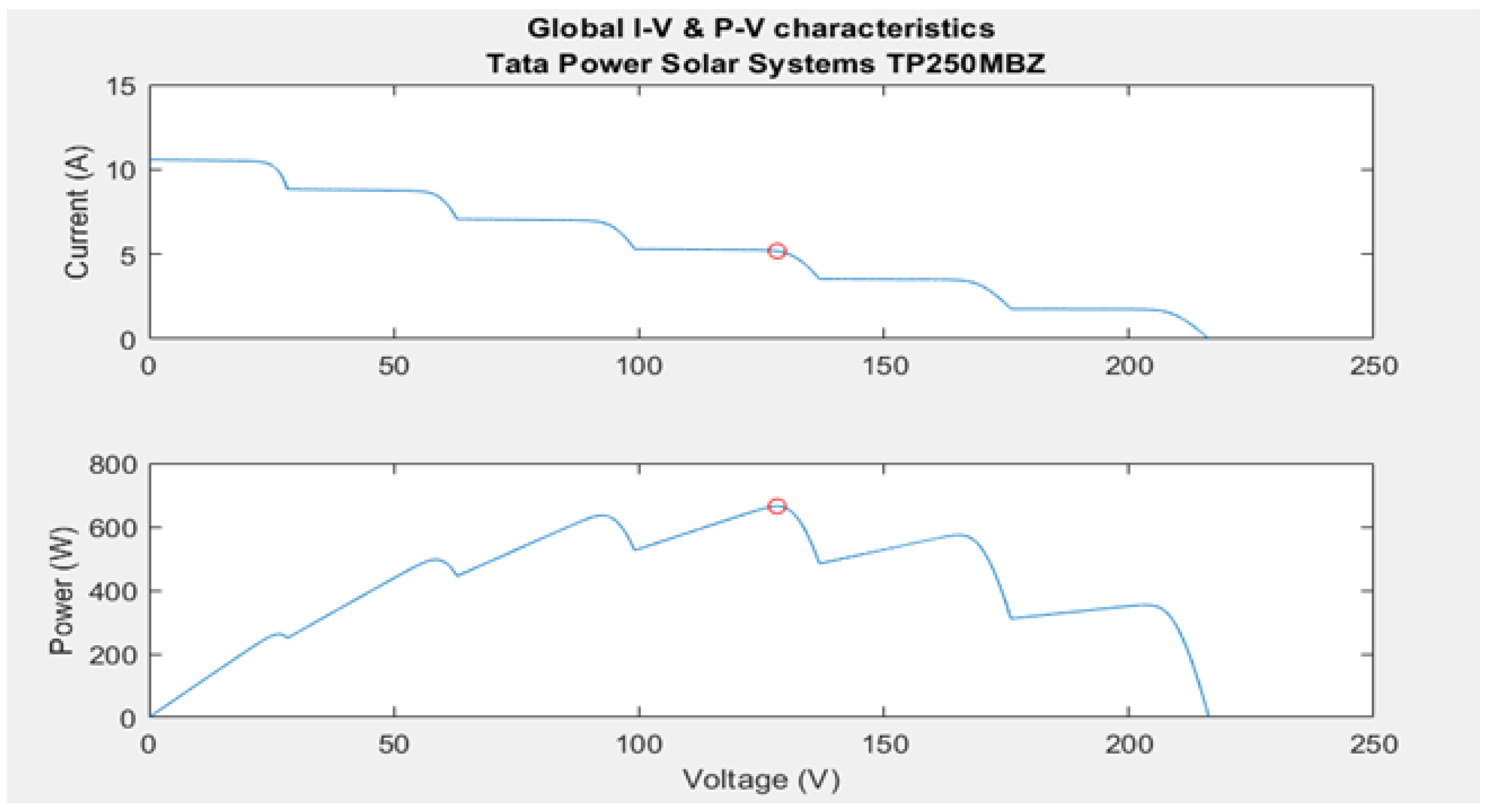
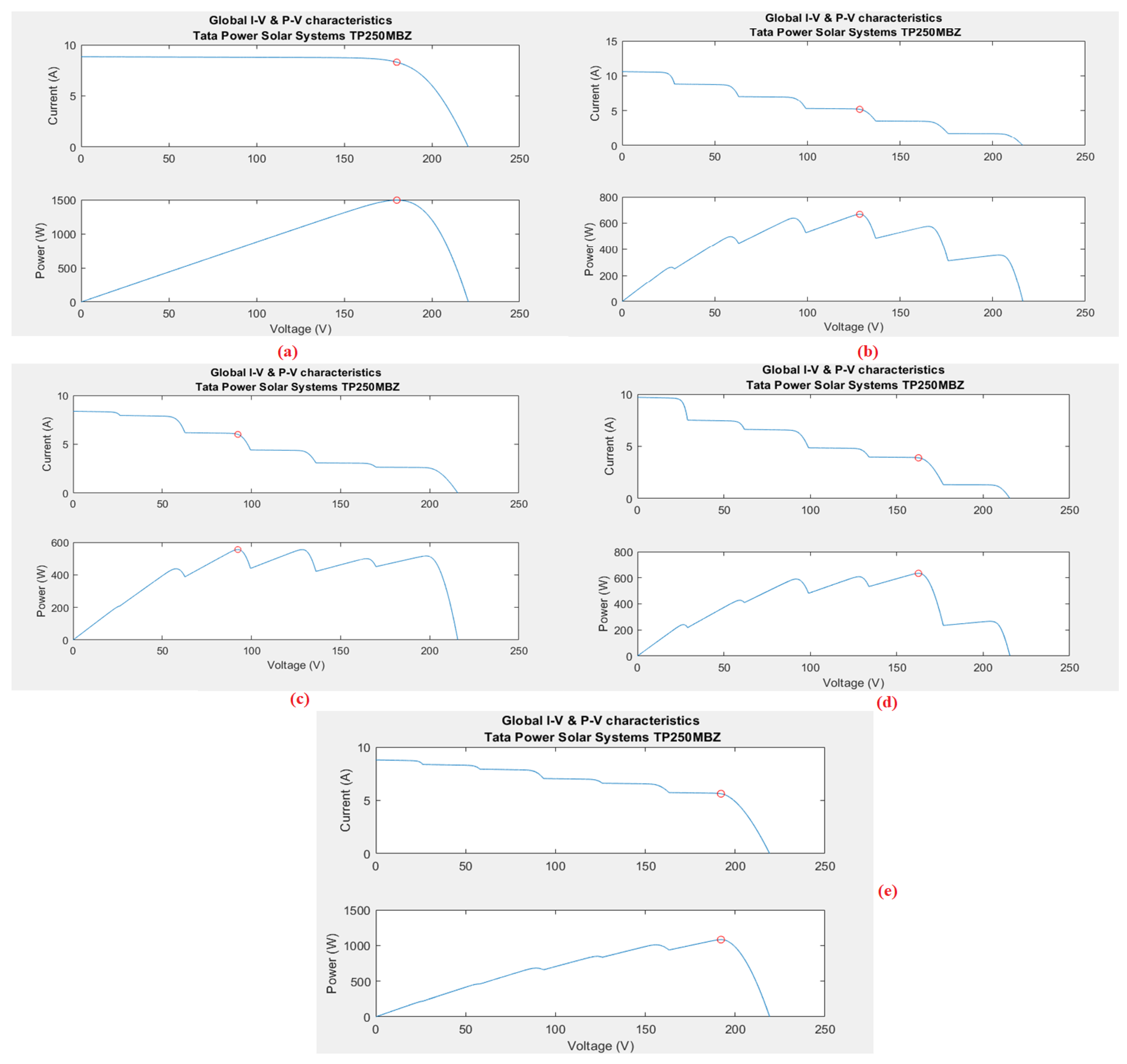
2.1.3. The Effect of Partial Shading Conditions on PV Energy Systems
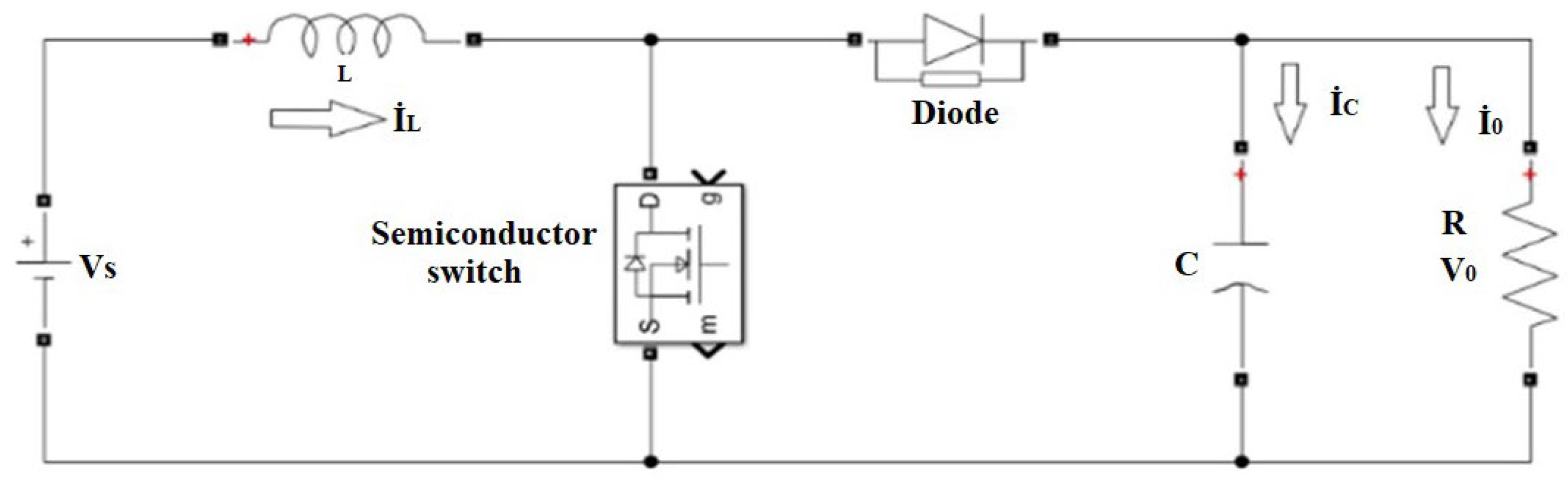
2.1.4. DC–DC Boost Converter
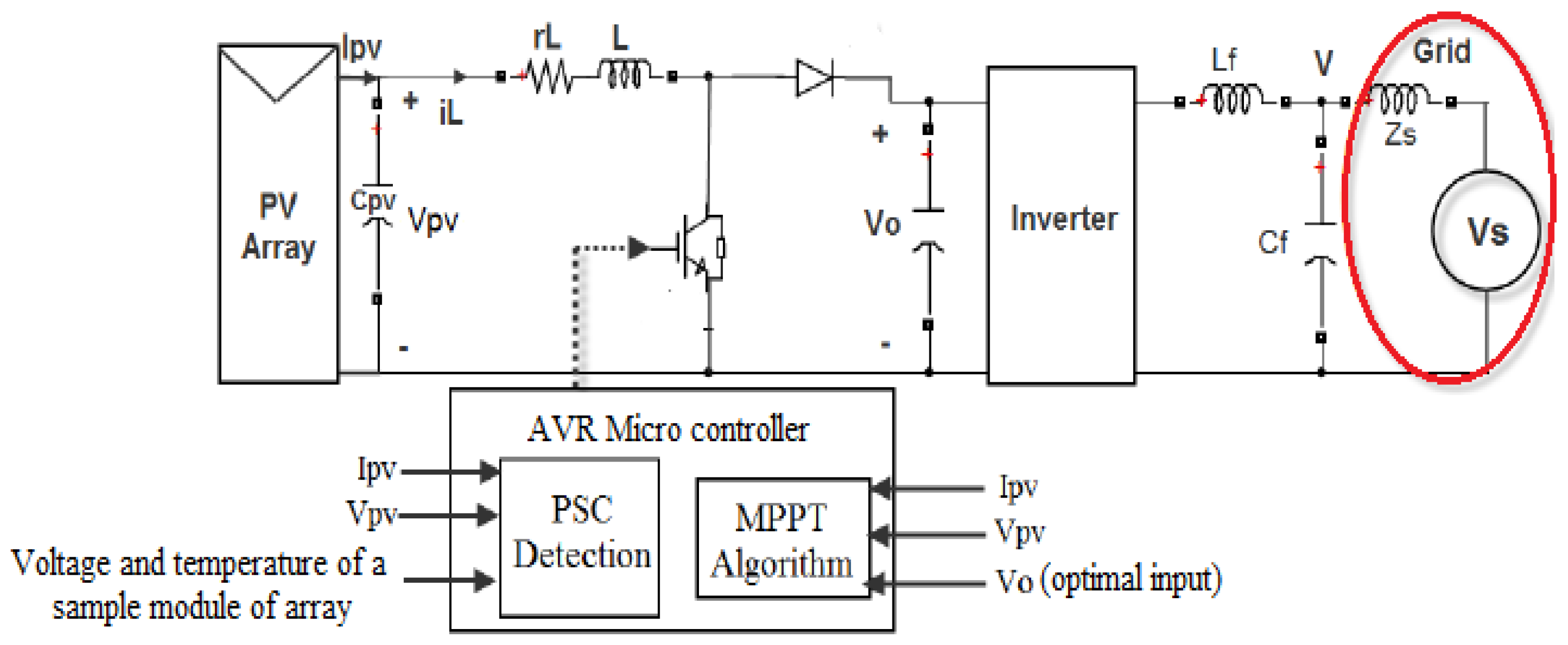
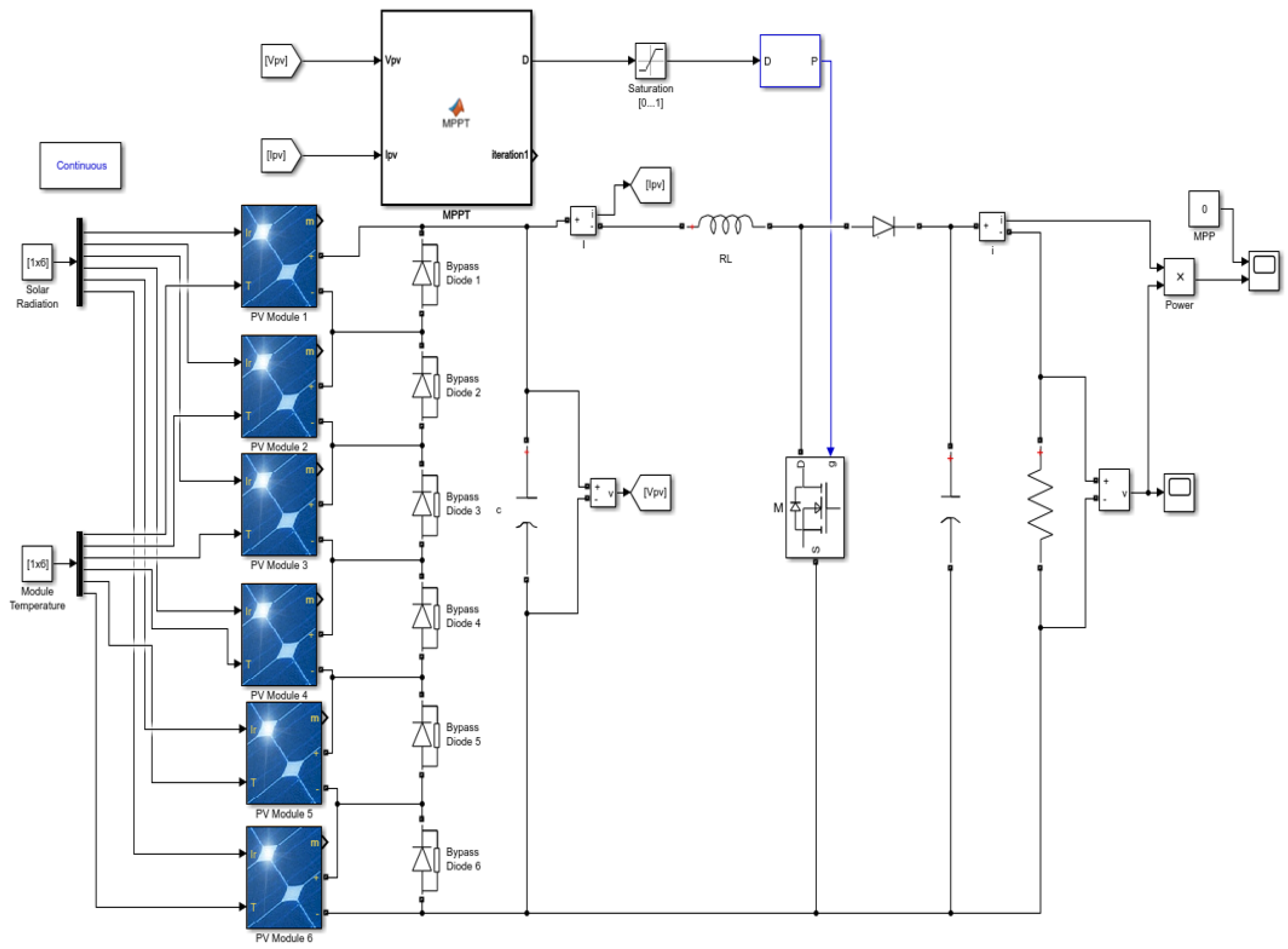
2.1.5. System Design
2.2. Maximum Power Point Tracking
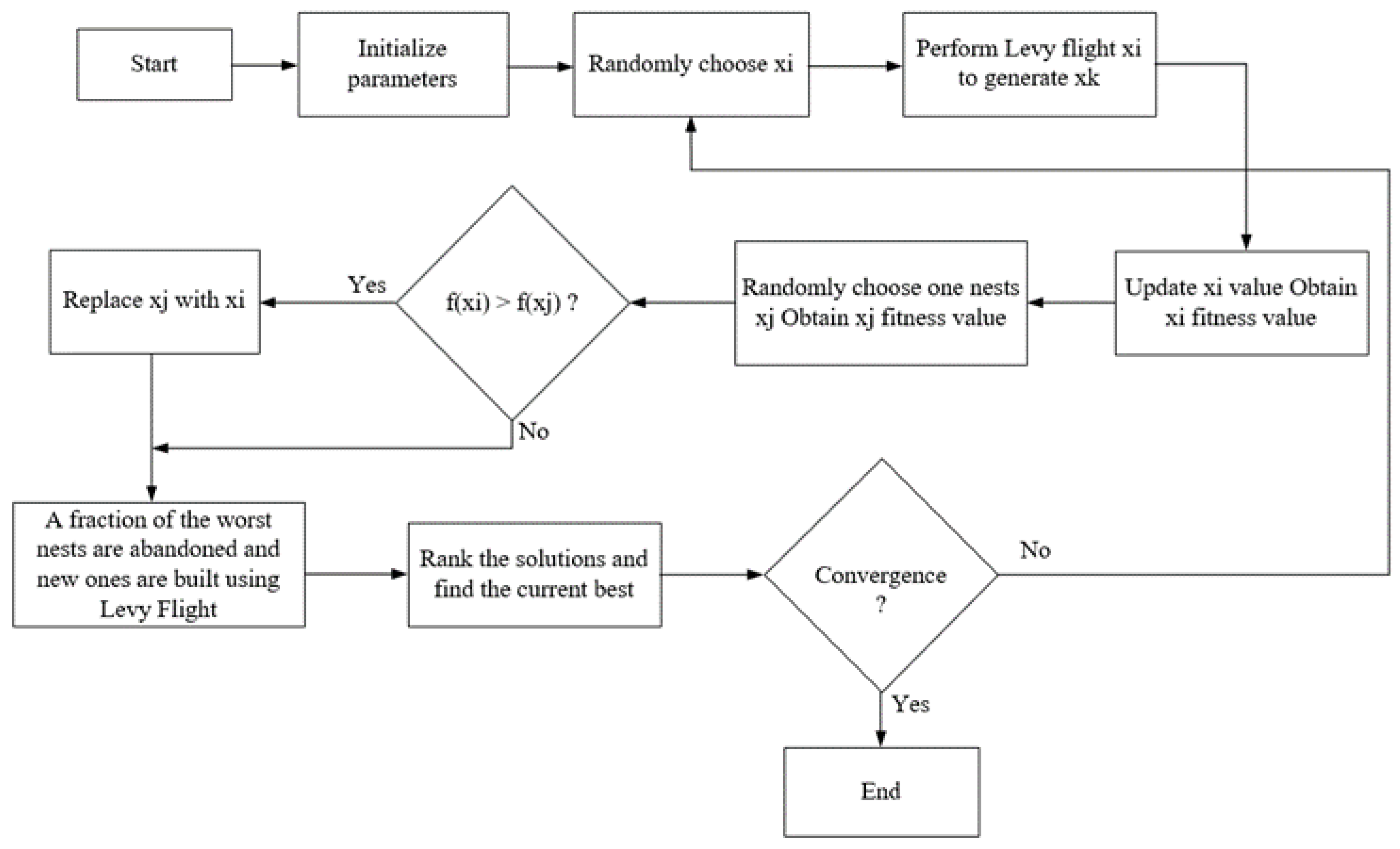
2.3. Cuckoo Search Algorithm (CSA)
- ∗
- Cuckoos lay only one egg at a time in a randomly selected nest.
- ∗
- Those who have deposited eggs in the nests are transferred to the next generation.
- ∗
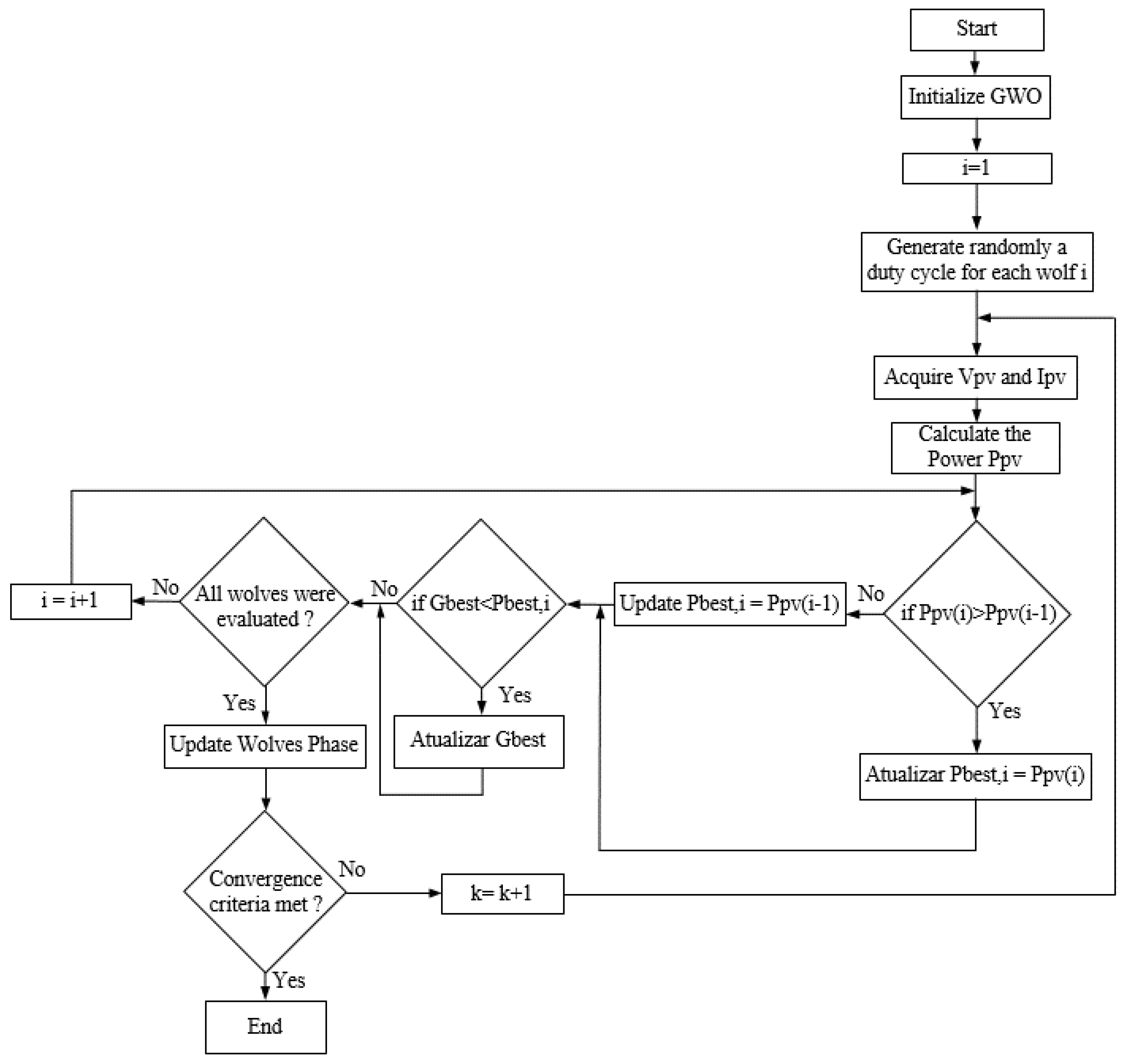
2.4. Grey Wolf Optimization Algorithm (GWO)
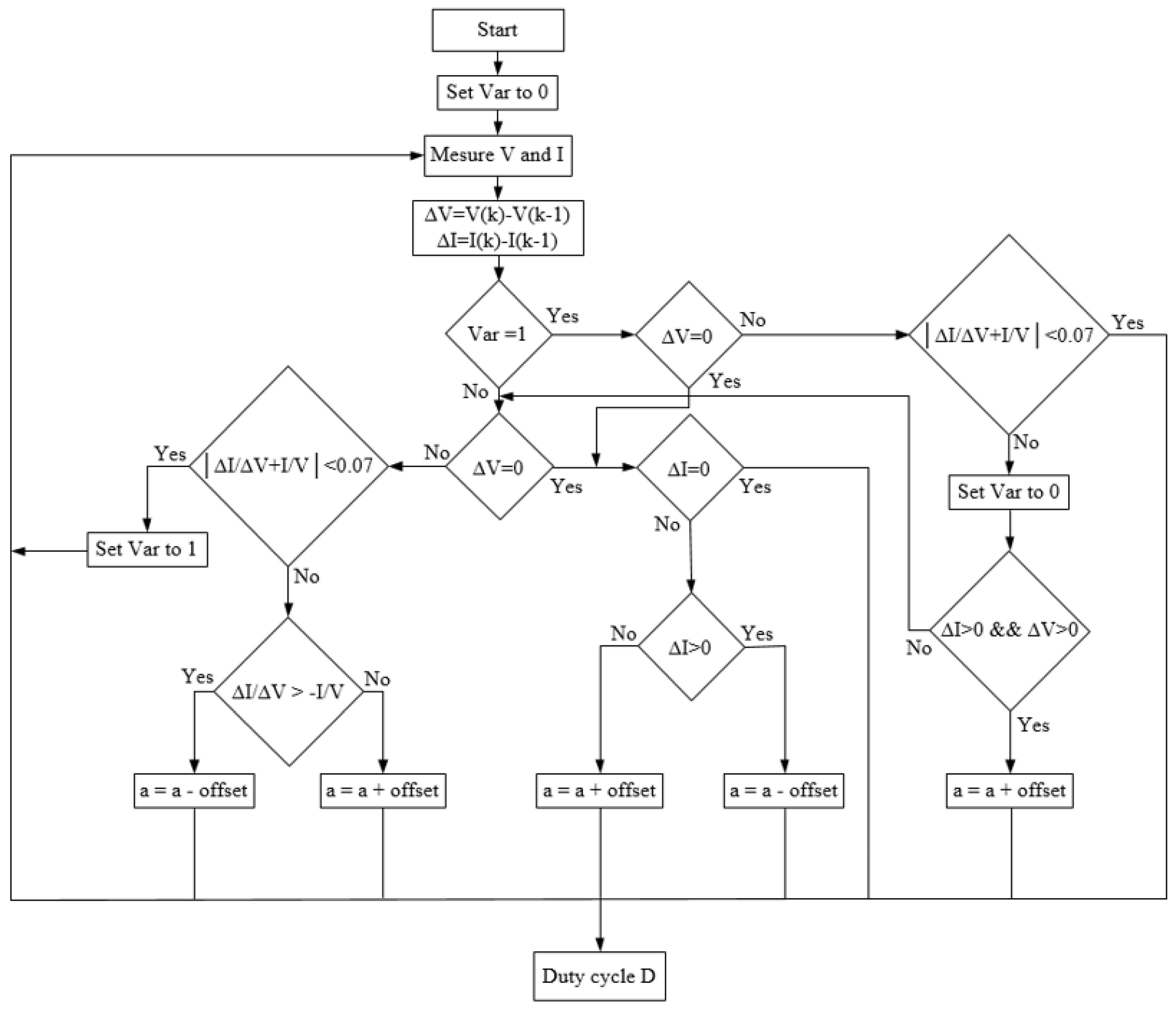
2.5. Modified Incremental Conductivity Algorithm (MIC)
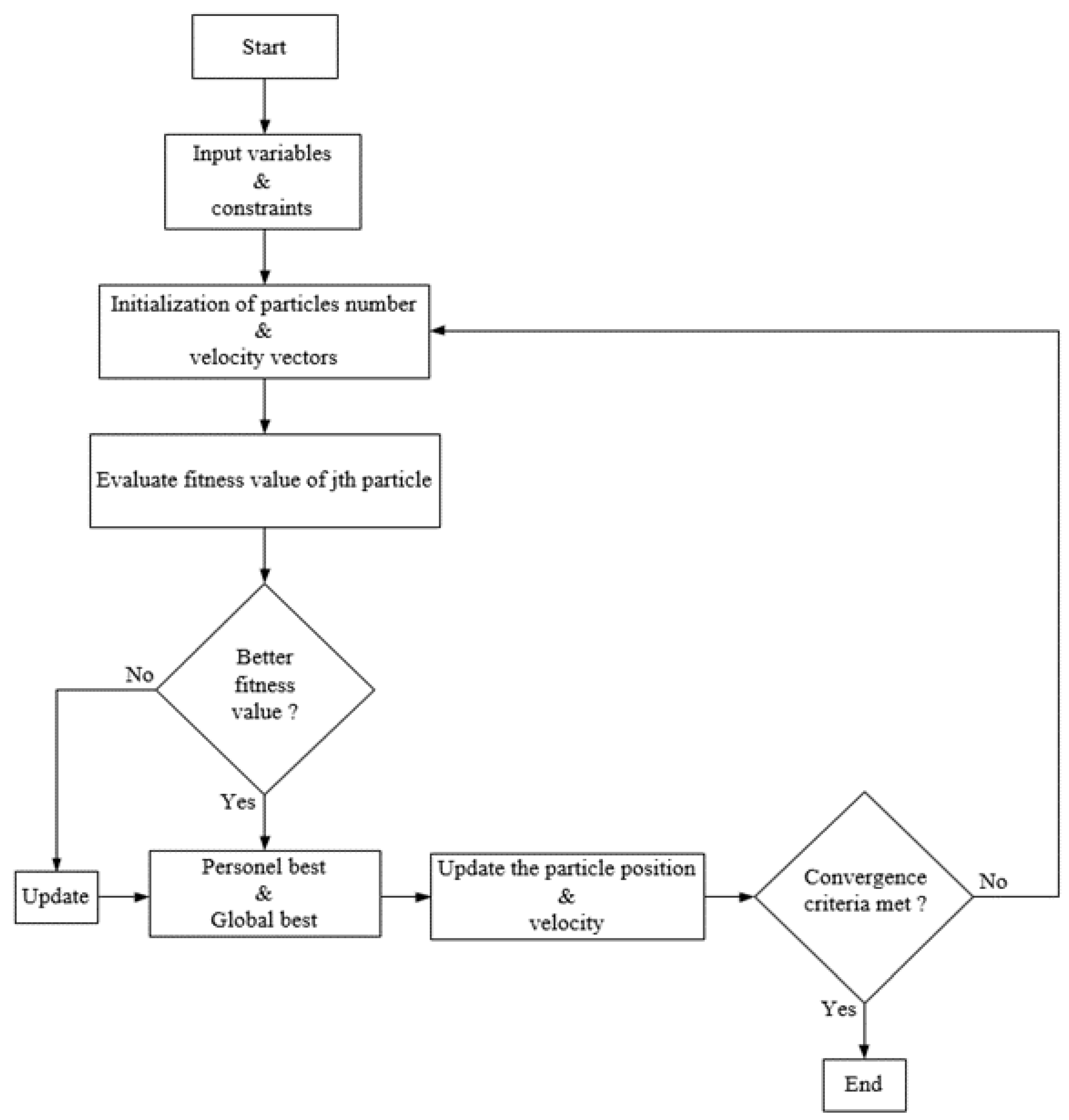
2.6. Particle Swarm Optimization Algorithm (PSO)
3. Findings and Discussion
3.1. Result Obtained from the Designed System
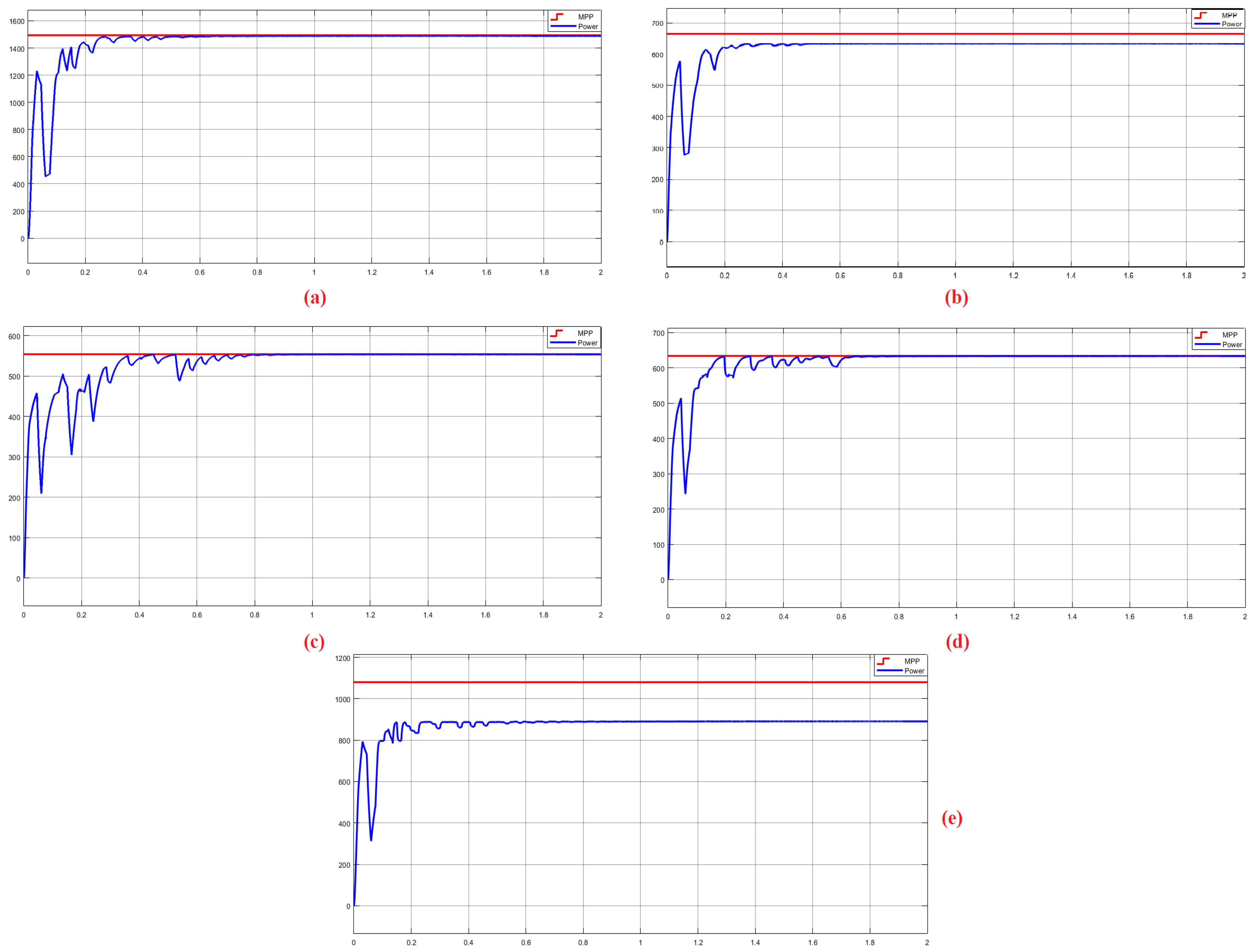
3.2. Modeling the Designed System with Cuckoo Search Optimization Algorithm
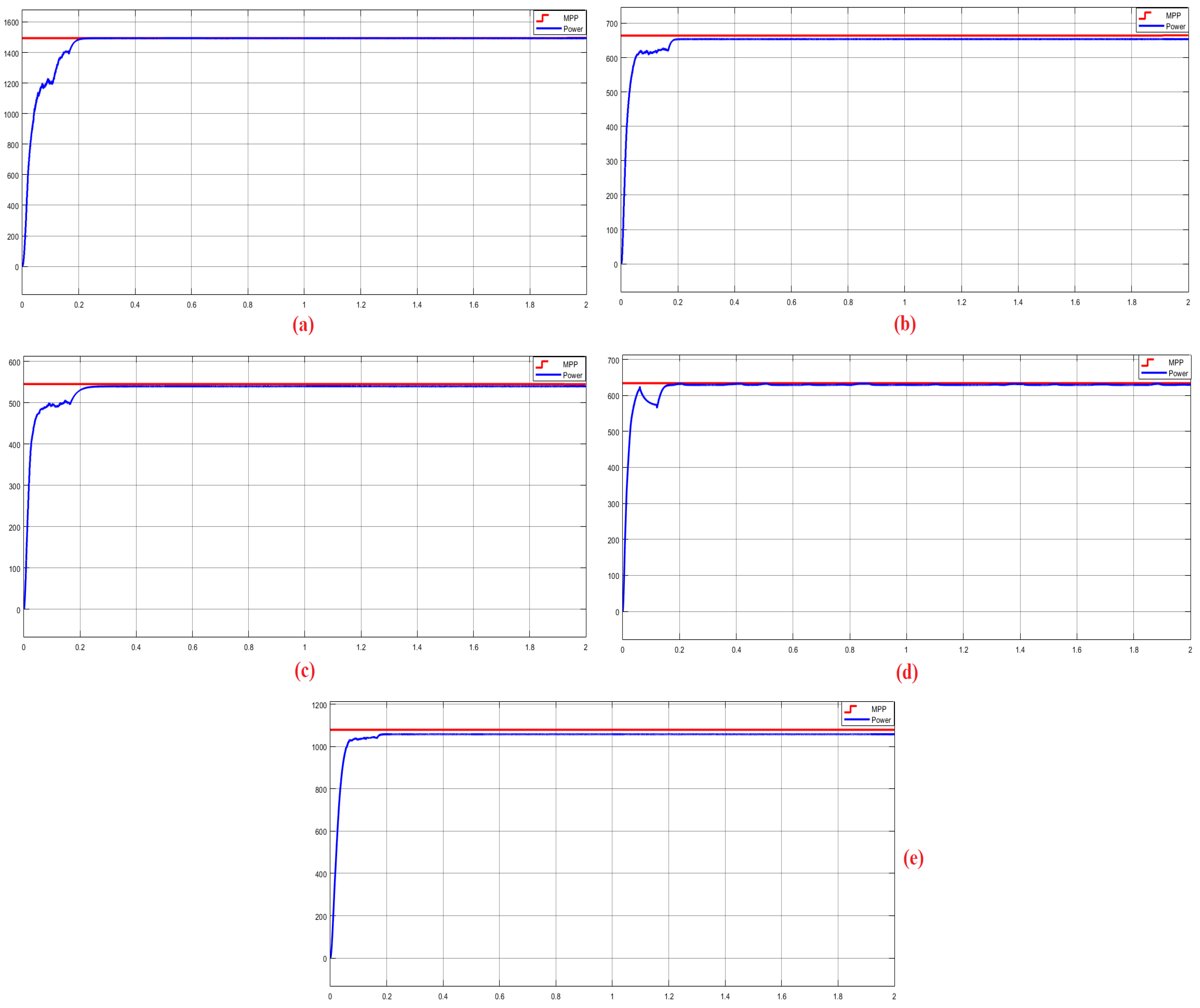
3.3. Modeling the Designed System with Grey Wolf Optimization Algorithm
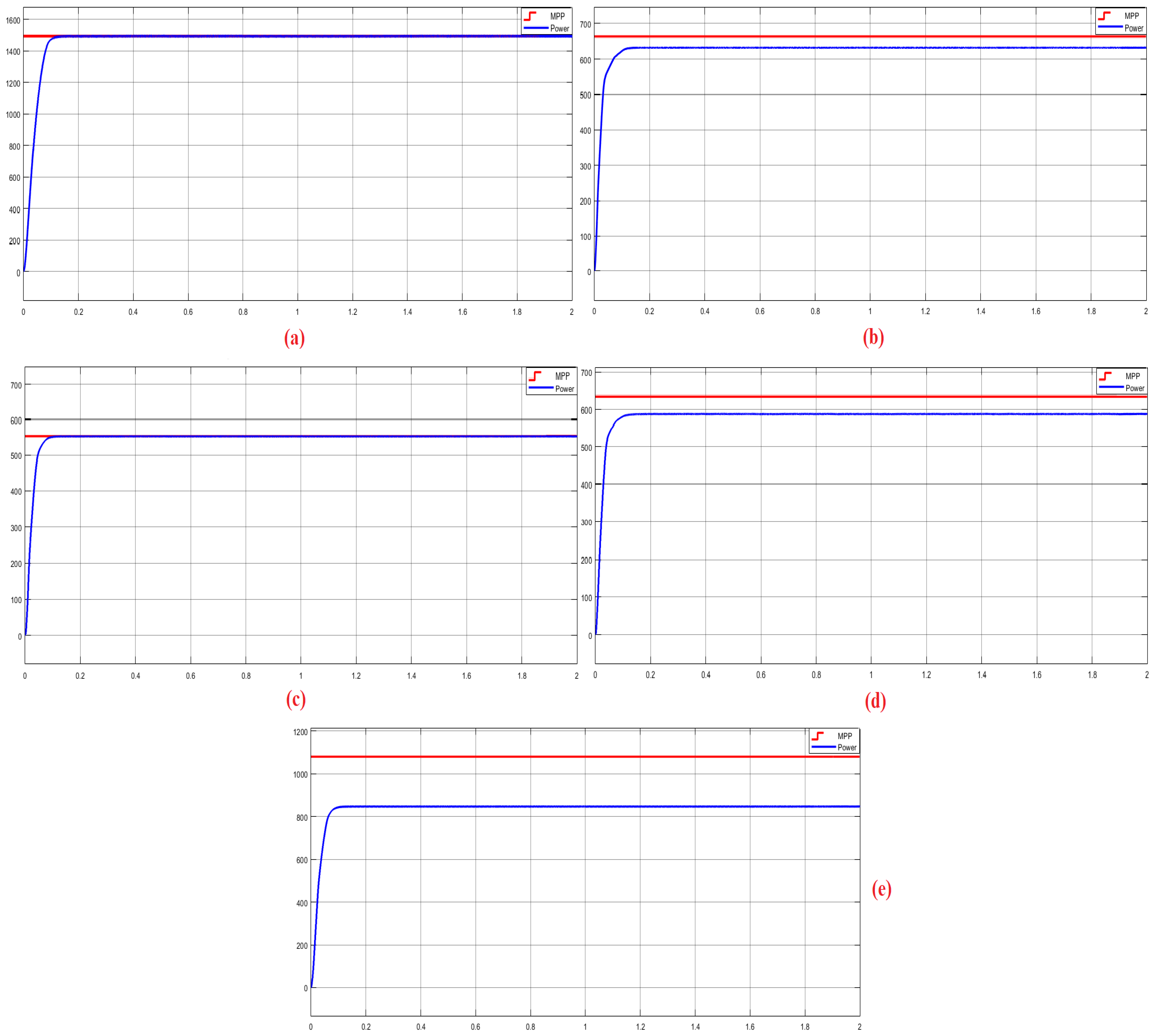
3.4. Modeling the Designed System with Modified Incremental Conductivity Algorithm
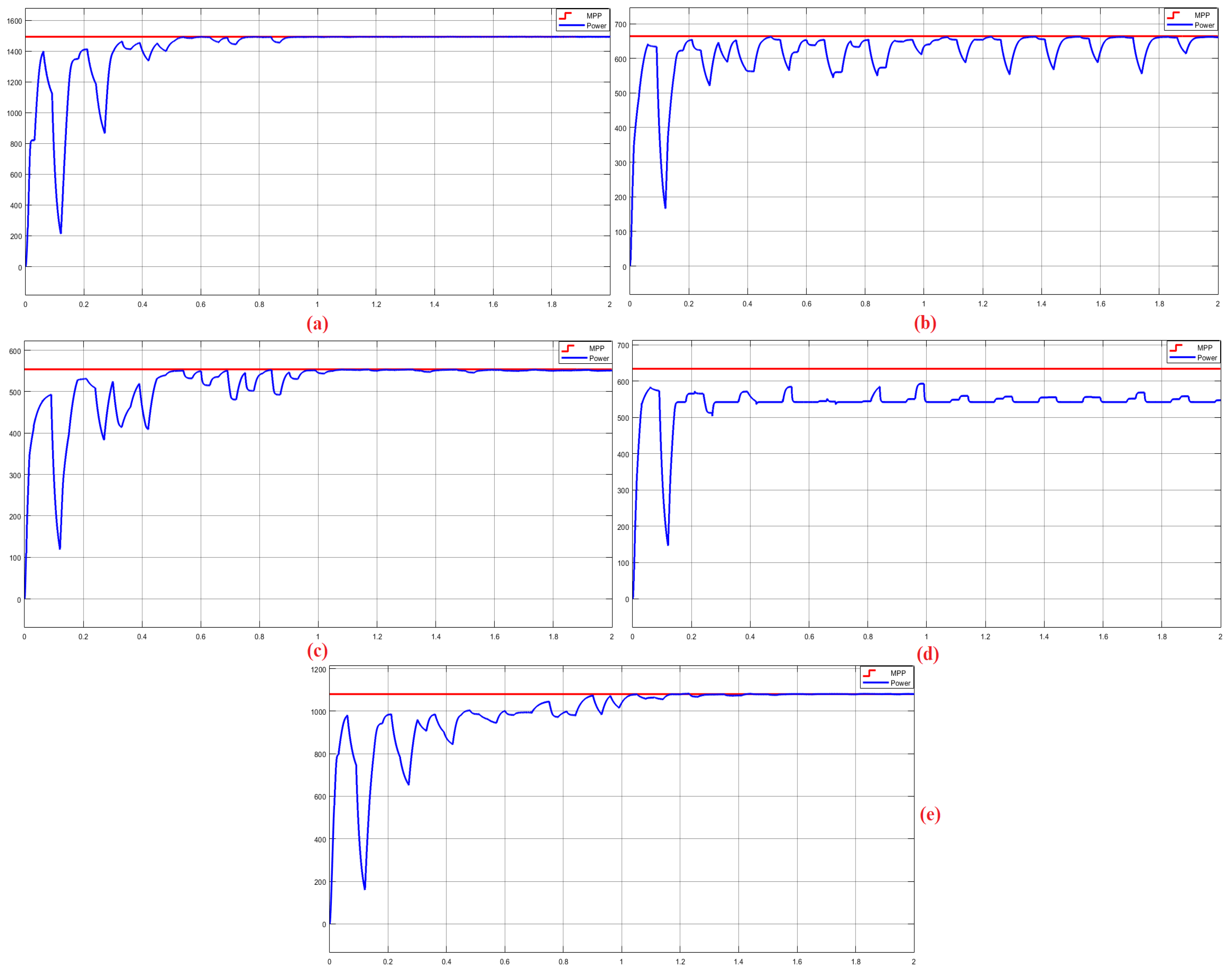
3.5. Modeling the Designed System with Particle Swarm Optimization Algorithm
4. Conclusions
Funding
Data Availability Statement
Conflicts of Interest
References
- Sanseverino, E.R.; Ngoc, T.N.; Cardinale, M.; Li Vigni, V.; Musso, D.; Romano, P.; Viola, F. Dynamic programming and Munkres algorithm for optimal photovoltaic arrays reconfiguration. Sol. Energy 2015, 122, 347–358. [Google Scholar] [CrossRef]
- Zhang, H.; Lu, Z.; Hu, W.; Wang, Y.; Dong, L.; Zhang, J. Coordinated optimal operation of hydro-wind-solar integrated systems. Appl. Energy 2019, 242, 883–896. [Google Scholar] [CrossRef]
- Kabalci, E. Maximum power point tracking (MPPT) algorithms for photovoltaic systems. In Energy Harvesting and Energy Efficiency, Technology, Methods, and Applications, 1st ed.; Lecture Notes in Energy; Bizon, N., Mahdavi Tabatabaei, N., Blaabjerg, F., Kurt, E., Eds.; Springer: Cham, Switzerland, 2017; Volume 37, pp. 205–234. [Google Scholar]
- Podder, A.K.; Roy, N.K.; Pota, H.R. MPPT methods for solar PV systems: A critical review based on tracking nature. IET Renew. Power Gener. 2019, 13, 1615–1632. [Google Scholar] [CrossRef]
- Dali, A.; Abdelmalek, S.; Bakdi, A.; Bettayeb, M. A novel effective nonlinear state observer based robust nonlinear sliding mode controller for a 6 kW Proton Exchange Membrane Fuel Cell voltage regulation. Sustain. Energy Technol. Assess. 2021, 44, 100996. [Google Scholar] [CrossRef]
- Ravyts, S.; Vecchia, M.D.; Van den Broeck, G.; Yordanov, G.H.; Gonçalves, J.E.; Moschner, J.D.; Saelens, D.; Driesen, J. Embedded BIPV module-level DC/DC converters: Classification of optimal ratings. Renew. Energy 2020, 146, 880–889. [Google Scholar] [CrossRef]
- Anwer, A.M.O.; Omar, F.A.; Bakir, H.; Kulaksiz, A.A. Sensorless control of a PMSM drive using EKF for wide speed range supplied by MPPT based solar PV system. Elektron. Ir Elektrotechnika 2020, 26, 32–39. [Google Scholar] [CrossRef] [Green Version]
- Karami, N.; Moubayed, N.; Outbib, R. General review and classification of different MPPT techniques. Renew. Sustain. Energy Rev. 2017, 68, 1–18. [Google Scholar] [CrossRef]
- Guiza, D.; Ounnas, D.; Soufi, Y.; Bouden, A.; Maamri, M. Implementation of Modified Perturb and Observe Based MPPT Algorithm for Photovoltaic System. In Proceedings of the International Conference on Sustainable Renewable Energy Systems and Applications (ICSRESA), Tebessa, Algeria, 4–5 December 2019. [Google Scholar]
- Ping, W.; Hui, D.; Changyu, D.; Shengbiao, Q. An Improved MPPT Algorithm Based on Traditional Incremental Conductance Method. In Proceedings of the 4th International Conference on Power Electronics Systems and Applications, Hong Kong, China, 8–10 June 2011. [Google Scholar]
- Schoeman, J.J.; van Wyk, J.D. A Simplified Maximal Power Controller for Terrestrial Photovoltaic Panel Arrays. In Proceedings of the IEEE Power Electronics Specialists Conference, Cambridge, MA, USA, 14–17 June 1982; pp. 361–367. [Google Scholar]
- Ankaiah, B.; Nageswararao, J. Enhancement of solar photovoltaic cell by using short-circuit current MPPT method. Int. J. Eng. Sci. Invent. 2013, 2, 45–50. [Google Scholar]
- Gosumbonggot, J.; Fujita, G. Partial shading detection and global maximum power point tracking algorithm for photovoltaic with the variation of irradiation and temperature. Energies 2019, 12, 202. [Google Scholar] [CrossRef] [Green Version]
- Avila, E.; Pozo, N.; Pozo, M.; Salazar, G.; Dominguez, X. Improved Particle Swarm Optimization Based MPPT for PV Systems Under Partial Shading Conditions. In Proceedings of the IEEE Southern Power Electronics Conference (SPEC), Puerto Varas, Chile, 4–7 December 2017. [Google Scholar]
- Ahmed, J.; Salam, Z. A maximum power point tracking (MPPT) for PV system using cuckoo search with partial shading capability. Appl. Energy 2014, 119, 118–130. [Google Scholar] [CrossRef]
- Mohapatra, A.; Nayak, B.; Das, P.; Mohanty, K.B. A review on MPPT techniques of PV system under partial shading condition. Renew. Sustain. Energy Rev. 2017, 80, 854–867. [Google Scholar] [CrossRef]
- Sagonda, A.F.; Folly, K.A. Maximum Power Point Tracking in Solar PV Under Partial Shading Conditions Using Stochastic Optimization Techniques. In Proceedings of the IEEE Congress on Evolutionary Computation (CEC), Wellington, New Zealand, 10–13 June 2019; pp. 1967–1974. [Google Scholar]
- Sawant, P.T.; Lbhattar, P.C.; Bhattar, C.L. Enhancement of PV System Based on Artificial Bee Colony Algorithm Under Dynamic Conditions. In Proceedings of the IEEE International Conference on Recent Trends in Electronics, Information & Communication Technology (RTEICT), Bangalore, India, 20–21 May 2016; pp. 1251–1255. [Google Scholar]
- Besheer, A.H.; Adly, M. Ant Colony System Based PI Maximum Power Point Tracking for Stand Alone Photovoltaic System. In Proceedings of the IEEE International Conference on Industrial Technology, Athens, Greece, 19–21 March 2012; pp. 693–698. [Google Scholar]
- Kaced, K.; Larbes, C.; Ramzan, N.; Bounabi, M.; Dahmane, Z.E. Bat algorithm based maximum power point tracking for photovoltaic system under partial shading conditions. Sol. Energy 2017, 158, 490–503. [Google Scholar] [CrossRef] [Green Version]
- Kumar, C.H.S.; Rao, R.S. A novel global MPP tracking of photovoltaic system based on whale optimization algorithm. Int. J. Renew. Energy Dev. 2016, 5, 225–232. [Google Scholar] [CrossRef]
- Aygul, K.; Cikan, M.; Demirdelen, T.; Tumay, M. Butterfly optimization algorithm based maximum power point tracking of photovoltaic systems under partial shading condition. Energy Sources Part A Recovery Utulization Environ. Eff. 2019, 1–19. [Google Scholar] [CrossRef]
- Mirza, A.F.; Mansoor, M.; Ling, Q.; Yin, B.; Javed, M.Y. A salp-swarm optimization based MPPT technique for harvesting maximum energy from PV systems under partial shading conditions. Energy Convers. Manag. 2020, 209, 112625. [Google Scholar] [CrossRef]
- Vasantharaj, S.; Vinodhkumar, G.; Sasikumar, M. Development of A Fuzzy Logic Based Photovoltaic Maximum Power Point Tracking Control System Using Boost Converter. In Proceedings of the IET Chennai 3rd International on Sustainable Energy and Intelligent Systems (SEISCON 2012), Tiruchengode, India, 27–29 December 2012. [Google Scholar]
- Kulaksiz, A.A.; Akkaya, R. A genetic algorithm optimized ANN-based MPPT algorithm for a stand-alone PV system with induction motor drive. Sol. Energy 2012, 86, 2366–2375. [Google Scholar] [CrossRef]
- Rizzo, S.A.; Scelba, G. ANN based MPPT method for rapidly variable shading conditions. Appl. Energy 2015, 145, 124–132. [Google Scholar] [CrossRef]
- Mansoor, M.; Mirza, A.F.; Ling, Q. Harris hawk optimization-based MPPT control for PV systems under partial shading conditions. J. Clean. Prod. 2020, 274, 122857. [Google Scholar] [CrossRef]
- Motamarri, R.; Bhookya, N. JAYA algorithm based on lévy flight for global MPPT under partial shading in photovoltaic system. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 9, 4979–4991. [Google Scholar] [CrossRef]
- Mohammadinodoushan, M.; Abbassi, R.; Jerbi, H.; Waly Ahmed, F.; Abdalqadir, K.; Ahmed, H.; Rezvani, A. A new MPPT design using variable step size perturb and observe method for PV system under partially shaded conditions by modified shuffled frog leaping algorithm-SMC controller. Sustain. Energy Technol. Assess. 2021, 45, 101056. [Google Scholar] [CrossRef]
- Tey, K.S.; Mekhilef, S. Modified incremental conductance algorithm for photovoltaic system under partial shading conditions and load variation. IEEE Trans. Ind. Electron. 2014, 61, 5384–5392. [Google Scholar]
- Babu, T.S.; Rajasekar, N.; Sangeetha, K. Modified particle swarm optimization technique based maximum power point tracking for uniform and under partial shading condition. Appl. Soft Comput. 2015, 34, 613–624. [Google Scholar] [CrossRef]
- Omar, F.A.; Kulaksiz, A.A. Experimental evaluation of a hybrid global maximum power tracking algorithm based on modified firefly and perturbation and observation algorithms. Neural Comput. Appl. 2021, 33, 17185–17208. [Google Scholar] [CrossRef]
- Kulaksız, A.A.; Akkaya, R. Training data optimization for ANNs using genetic algorithms to enhance MPPT efficiency of a stand-alone PV system. Turk. J. Electr. Eng. Comput. Sci. 2012, 20, 241–254. [Google Scholar] [CrossRef]
- Manickam, C.; Raman, G.R.; Raman, G.P.; Ganesan, S.I.; Nagamani, C. A hybrid algorithm for tracking of GMPPT based on P&O and PSO with reduced power oscillation in string inverters. IEEE Trans. Ind. Electron. 2016, 63, 6097–6106. [Google Scholar]
- Zhang, W.; Zhou, G.; Ni, H.; Sun, Y. A modified hybrid maximum power point tracking method for photovoltaic arrays under partially shading condition. IEEE Access 2019, 7, 160091–160100. [Google Scholar] [CrossRef]
- Rocha, M.V.; Sampaio, L.P.; Silva, S.A.O. Comparative analysis of MPPT algorithms based on bat algorithm for PV systems under partial shading condition. Sustain. Energy Technol. Assess. 2020, 40, 100761. [Google Scholar] [CrossRef]
- Özdemir, A.; Pamuk, N. Investigation of maximum power point tracking in complex photovoltaic energy systems under partial shading conditions using metaheuristic algorithms. Eur. J. Sci. Technol. 2021, 31 (Suppl. S1), 157–164. [Google Scholar]
- Sameeullah, M.; Swarup, A. MPPT schemes for PV system under normal and partial shading condition: A review. Int. J. Renew. Energy Dev. 2016, 5, 79–94. [Google Scholar] [CrossRef] [Green Version]
- Celikel, R.; Yilmaz, M.; Gundogdu, A. A voltage scanning-based MPPT method for PV power systems under complex partial shading conditions. Renew. Energy 2022, 184, 361–373. [Google Scholar] [CrossRef]
- Luque, A.; Hegedus, S. Handbook of Photovoltaic Science and Engineering, 2nd ed.; John Wiley & Sons, Ltd.: West Sussex, UK, 2011; pp. 841–895. [Google Scholar]
- Suryavanshiu, R.G.; Suryavanshi, S.R.; Joshi, D.R.; Magadum, R.B. Maximum Power Point Tracking of SPV at Varying Atmospheric Condition Using Genetic Algorithm. In Proceedings of the International Conference on Energy Systems and Applications, Pune, India, 30 October–1 November 2015; pp. 415–419. [Google Scholar]
- Bulárka, S.; Gontean, A. Dynamic PV Array Reconfiguration Under Suboptimal Conditions in Hybrid Solar Energy Harvesting Systems. In Proceedings of the IEEE 23rd International Symposium for Design and Technology in Electronic Packaging (SIITME), Constanta, Romania, 26–29 October 2017; pp. 419–422. [Google Scholar]
- Saad, E.; Helmy, S.; Elkoteshy, Y.; AbouZayed, U. Implementation of a Modified MPPT Strategy for Solar-PV Arrays Connected to Harmonic-Polluted Grids Under Partial Shading Conditions. In Proceedings of the International Telecommunications Conference (ITC-Egypt), Alexandria, Egypt, 13–15 July 2021. [Google Scholar]
- Kaffash, M.; Javidi, M.H.; Darudi, A. A Combinational Maximum Power Point Tracking Algorithm in Photovoltaic Systems Under Partial Shading Conditions. In Proceedings of the Iranian Conference on Renewable Energy & Distributed Generation (ICREDG), Mashhad, Iran, 2–3 April 2016; pp. 103–107. [Google Scholar]
- Omar, F.A. Artificial Intelligence-Based Maximum Power Point Tracking Controller for PV Modules under Partial Shading Conditions. Ph.D. Thesis, Selçuk University, Konya, Turkey, 2020. [Google Scholar]
- Aashoor, F. Maximum Power Point Tracking Techniques for Photovoltaic Water Pumping Systems. Ph.D. Thesis, University of Bath, Bath, UK, 2015. [Google Scholar]
- Rashid, A.H. Power Electronics Handbook, 4th ed.; Butterworth-Heinemann: Oxford, UK, 2018; pp. 15–48. [Google Scholar]
- Santos, J.L.; Antunes, F.; Chehab, A.; Cruz, C. A maximum power point tracker for FV systems using a high performance boost converter. Sol. Energy 2006, 80, 772–778. [Google Scholar] [CrossRef]
- Esram, T.; Chapman, P.L. Comparison of photovoltaic array maximum power point tracking techniques. IEEE Trans. Energy Convers. 2007, 22, 439–449. [Google Scholar] [CrossRef] [Green Version]
- Nugraha, D.A.; Lian, K.L.; Suwarno. A novel MPPT method based on cuckoo search algorithm and golden section search algorithm for partially shaded PV system. Can. J. Electr. Comput. Eng. 2019, 42, 173–182. [Google Scholar] [CrossRef]
- Yang, X.S. Nature-Inspired Metaheuristic Algorithms, 2nd ed.; Luniver Press: Cambridge, UK, 2010; pp. 127–140. [Google Scholar]
- Peng, B.R.; Ho, K.C.; Liu, Y.H. A novel and fast MPPT method suitable for both fast changing and partially shaded conditions. IEEE Trans. Ind. Electron. 2018, 65, 3240–3251. [Google Scholar] [CrossRef]
- Ahmed, J.; Salam, Z. A Soft Computing MPPT for PV System Based on Cuckoo Search Algorithm. In Proceedings of the 4th International Conference on Power Engineering, Energy and Electrical Drives, Istanbul, Turkey, 13–17 May 2013; pp. 558–562. [Google Scholar]
- Pant, S.; Saini, R.P. Comparative Study of MPPT Techniques for Solar Photovoltaic System. In Proceedings of the International Conference on Electrical, Electronics and Computer Engineering (UPCON), Aligarh, India, 8–10 November 2019; pp. 1–6. [Google Scholar]
- Ho, K.C.; Lin, C.C.; Bagci, F.S.; Wang, S.C.; Liu, Y.H.; Cheng, Y.S. Comparison of Swarm Intelligence Based Global Maximum Power Point Tracking Methods for Photovoltaic Generation System. In Proceedings of the 10th International Conference on Power Electronics and ECCE Asia (ICPE 2019—ECCE Asia), Busan, Republic of Korea, 27–30 May 2019. [Google Scholar]
- Yang, X.S.; Deb, S. Cuckoo Search via Levy Flights. In Proceedings of the World Congress on Nature & Biologically Inspired Computing (NaBIC), Coimbatore, India, 9–11 December 2009; pp. 210–214. [Google Scholar]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey wolf optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef] [Green Version]
- Mohanty, S.; Subudhi, B.; Ray, P.K. A new MPPT design using grey wolf optimization technique for photovoltaic system under partial shading conditions. IEEE Trans. Sustain. Energy 2016, 7, 181–188. [Google Scholar] [CrossRef]
- Rocha, M.V.; Sampaio, L.P.; Silva, S.A.O. Comparative Analysis of ABC, Bat, GWO and PSO Algorithms for MPPT in PV Systems. In Proceedings of the 8th International Conference on Renewable Energy Research and Applications (ICRERA), Brasov, Romania, 3–6 November 2019; pp. 347–352. [Google Scholar]
- El-Hassan, D.; Hassan, M.A.M.; Elshahed, M.A. Comparison Between Maximum Power Point Tracking Techniques for Grid-Connected PV System. In Proceedings of the 10th IEEE International Conference on Intelligent Data Acquisition and Advanced Computing Systems: Technology and Applications (IDAACS), Metz, France, 18–21 September 2019; pp. 1050–1055. [Google Scholar]
- Motahhir, S.; El Ghzizal, A.; Sebti, S.; Derouich, A. Modeling of photovoltaic system with modified incremental conductance algorithm for fast changes of irradiance. Int. J. Photoenergy 2018, 2018, 3286479. [Google Scholar] [CrossRef] [Green Version]
- Necaibia, S.; Kelaiaia, M.S.; Labar, H.; Necaibia, A.; Castronuovo, E.D. Enhanced auto-scaling incremental conductance MPPT method, implemented on low-cost microcontroller and SEPIC converter. Sol. Energy 2019, 180, 152–168. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. Particle Swarm Optimization. In Proceedings of the ICNN’95—International Conference on Neural Networks, Perth, Australia, 27 November–1 December 1995; pp. 1942–1948. [Google Scholar]
- Chaieb, H.; Sakly, A. Comparison Between P&O and P.S.O Methods Based MPPT Algorithm for Photovoltaic Systems. In Proceedings of the 16th International Conference on Sciences and Techniques of Automatic Control and Computer Engineering (STA), Monastir, Tunisia, 21–23 December 2015; pp. 694–699. [Google Scholar]
- Sawant, P.T.; Bhattar, C.L. Optimization of PV System Using Particle Swarm Algorithm Under Dynamic Weather Conditions. In Proceedings of the IEEE 6th International Conference on Advanced Computing (IACC), Bhimavaram, India, 27–28 February 2016; pp. 208–213. [Google Scholar]
- Shehu, M.M.; Dong, M.; Hu, J. Optimization of Particle Swarm Based MPPT Under Partial Shading Conditions in Photovoltaic Systems. In Proceedings of the IEEE 16th Conference on Industrial Electronics and Applications (ICIEA), Chengdu, China, 1–4 August 2021; pp. 267–272. [Google Scholar]
- Ibrahim, A.W.; Shafik, M.B.; Ding, M.; Sarhan, M.A.; Fang, Z.; Alareqi, A.G.; Almoqri, T.; Al-Rassas, A.M. PV maximum power-point tracking using modified particle swarm optimization under partial shading conditions. Chin. J. Electr. Eng. 2020, 6, 106–121. [Google Scholar] [CrossRef]
- Beltran, A.S.; Das, S. Particle Swarm Optimization with Reducing Boundaries (PSO-RB) for Maximum Power Point Tracking of Partially Shaded PV Arrays. In Proceedings of the 47th IEEE Photovoltaic Specialists Conference (PVSC), Calgary, AB, Canada, 15 June–21 August 2020; pp. 2040–2043. [Google Scholar]
- Obukhov, S.; Ibrahim, A.; Zaki Diab, A.A.; Al-Sumaiti, A.S.; Aboelsaud, R. Optimal performance of dynamic particle swarm optimization based maximum power trackers for stand-alone PV system under partial shading conditions. IEEE Access 2020, 8, 20770–20785. [Google Scholar] [CrossRef]
- Alshareef, M.; Lin, Z.; Ma, M.; Cao, W. Accelerated particle swarm optimization for photovoltaic maximum power point tracking under partial shading conditions. Energies 2019, 12, 623. [Google Scholar] [CrossRef] [Green Version]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Power at STC (W) | 250 | Vmp: Voltage at Max Power (V) | 30 |
| Power at PTC (W) | 222.7 | Imp: Current at Max Power (A) | 8.3 |
| Power Density at STC (W/m2) | 151.515 | Voc: Open Circuit Voltage (V) | 36.8 |
| Power Density at PTC (W/m2) | 134.97 | Isc: Short Circuit Current (A) | 8.83 |
| Panel | 1. UIC (W/m2) | 2. CPSC (W/m2) | 3. CPSC (W/m2) | 4. CPSC (W/m2) | 5. CPSC (W/m2) |
|---|---|---|---|---|---|
| Panel 1 | 1000 | 1200 | 350 | 150 | 1000 |
| Panel 2 | 1000 | 1000 | 950 | 450 | 800 |
| Panel 3 | 1000 | 800 | 900 | 550 | 950 |
| Panel 4 | 1000 | 600 | 700 | 750 | 750 |
| Panel 5 | 1000 | 400 | 500 | 850 | 900 |
| Panel 6 | 1000 | 200 | 300 | 1100 | 650 |
| Shading | Algorithm | Power (W) | Efficiency (η) | Convergence Speed (s) | Oscillation (%) |
|---|---|---|---|---|---|
| 1. UIC | CSA | 1489 W | 99.66% | 0.48 | 0 |
| GWO | 1493.9 W | 99.99% | 0.25 | 0 | |
| MIC | 1493.5 W | 99.96% | 0.16 | 0 | |
| PSO | 1493.5 W | 99.96% | 0.92 | 0 | |
| 2. CPSC | CSA | 633.5 W | 95.40% | 0.49 | 0 |
| GWO | 653.5 W | 98.41% | 0.20 | 0 | |
| MIC | 633.5 W | 95.40% | 0.15 | 0 | |
| PSO | 662 W | 99.69% | 1.35 | 16.84 | |
| 3. CPSC | CSA | 553.5 W | 99.90% | 0.88 | 0 |
| GWO | 548.5 W | 99.00% | 0.29 | 0 | |
| MIC | 553.5 W | 99.90% | 0.14 | 0 | |
| PSO | 552.5 W | 99.72% | 1.08 | 0.45 | |
| 4. CPSC | CSA | 631 W | 99.52% | 0.65 | 0 |
| GWO | 630 W | 99.36% | 0.21 | 0 | |
| MIC | 588.5 W | 92.82% | 0.14 | 0 | |
| PSO | 542 W | 85.48% | 1.95 | 0.92 | |
| 5. CPSC | CSA | 890 W | 82.40% | 0.79 | 0 |
| GWO | 1061 W | 98.24% | 0.19 | 0 | |
| MIC | 847 W | 78.42% | 0.15 | 0 | |
| PSO | 1077.5 W | 99.76% | 1.18 | 0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pamuk, N. Performance Analysis of Different Optimization Algorithms for MPPT Control Techniques under Complex Partial Shading Conditions in PV Systems. Energies 2023, 16, 3358. https://doi.org/10.3390/en16083358
Pamuk N. Performance Analysis of Different Optimization Algorithms for MPPT Control Techniques under Complex Partial Shading Conditions in PV Systems. Energies. 2023; 16(8):3358. https://doi.org/10.3390/en16083358
Chicago/Turabian StylePamuk, Nihat. 2023. "Performance Analysis of Different Optimization Algorithms for MPPT Control Techniques under Complex Partial Shading Conditions in PV Systems" Energies 16, no. 8: 3358. https://doi.org/10.3390/en16083358