
Performance Comparison of Pure Electric Vehicles with Two-Speed Transmission and Adaptive Gear Shifting Strategy Design

Abstract
:1. Introduction
- (1)
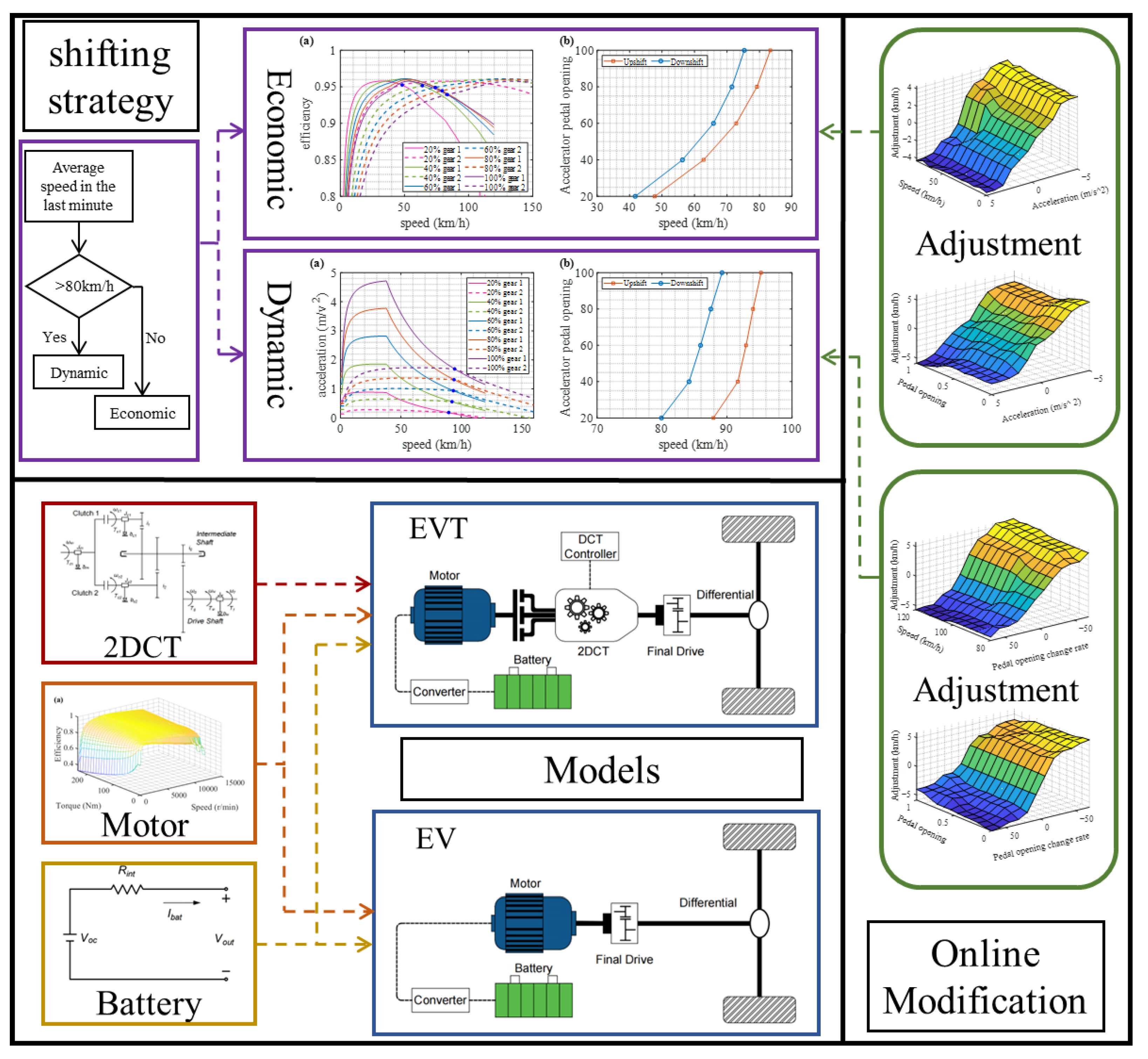
- A partition gear-shifting strategy combining the economic and dynamic performances of pure electric vehicle two-speed transmission was designed, and fuzzy logic was utilized to adjust the partition shifting strategy online.
- (2)
- Via comparison, the influence of the two-speed transmission on the economic and dynamic performances of the pure electric vehicle was revealed.
- (3)
- A few contributions to the application of automatic transmission in the field of passenger pure electric vehicles are provided.
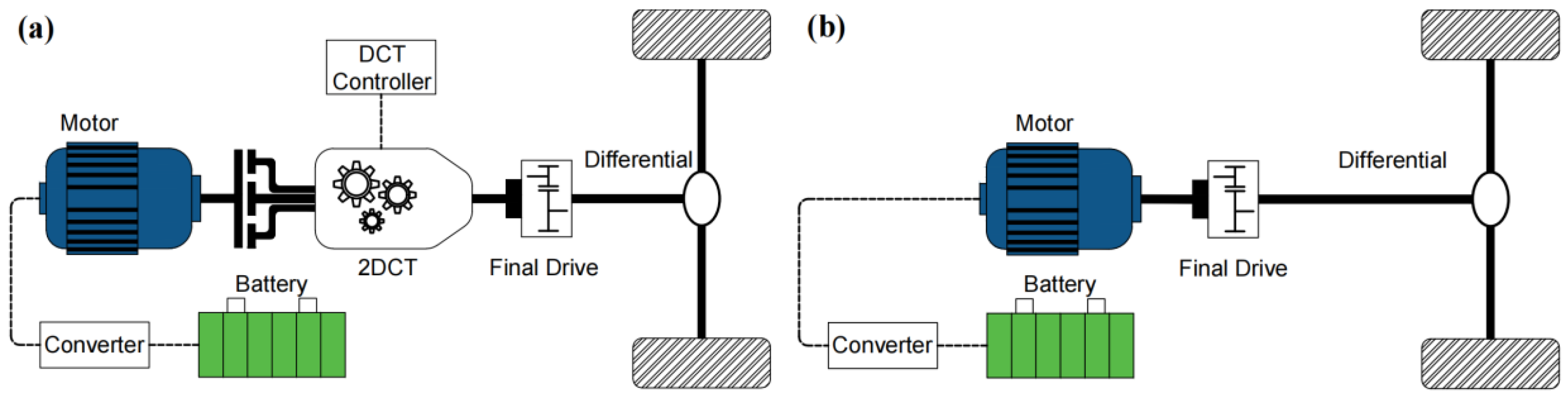
2. Powertrain Structure and System Modeling
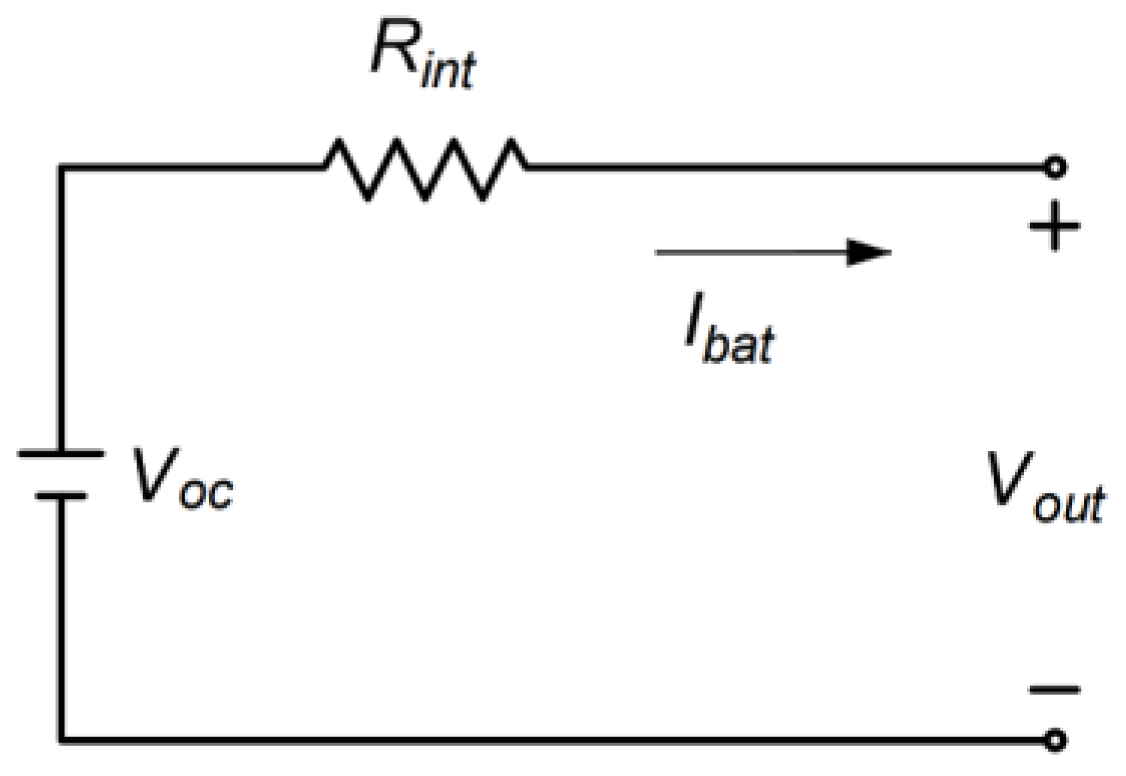
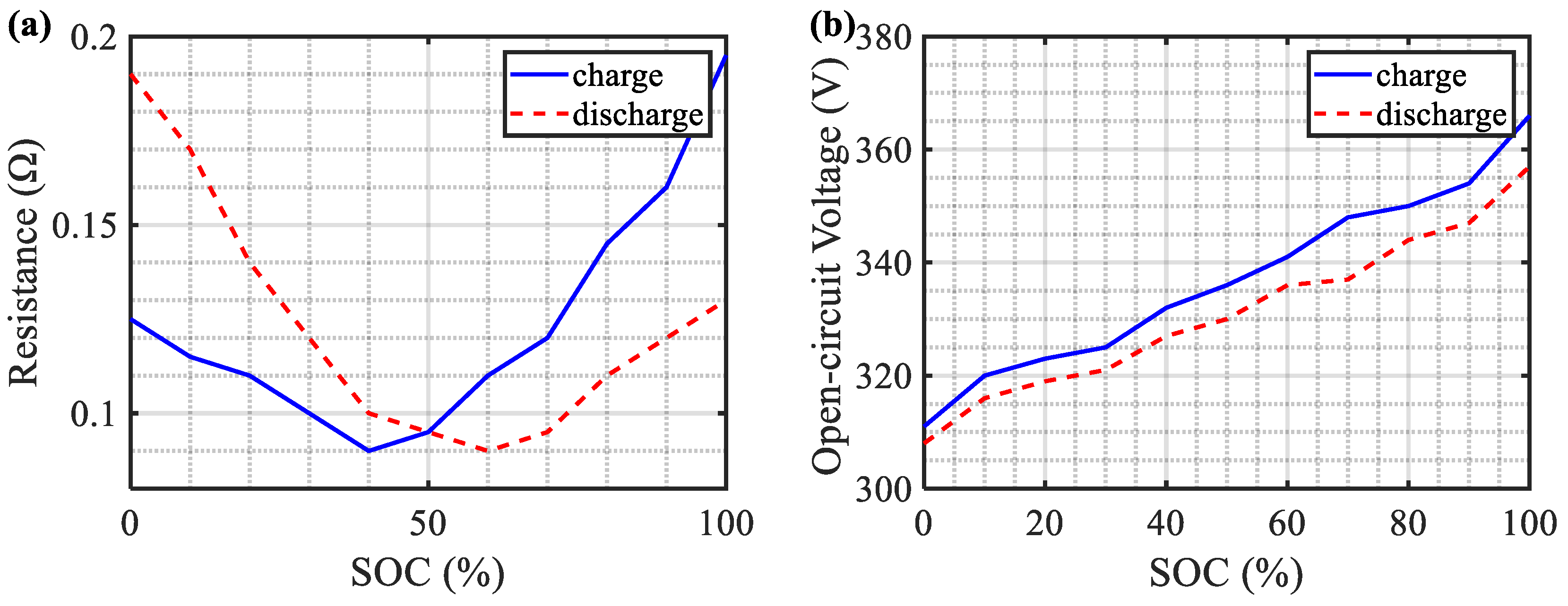
2.1. Battery Modeling
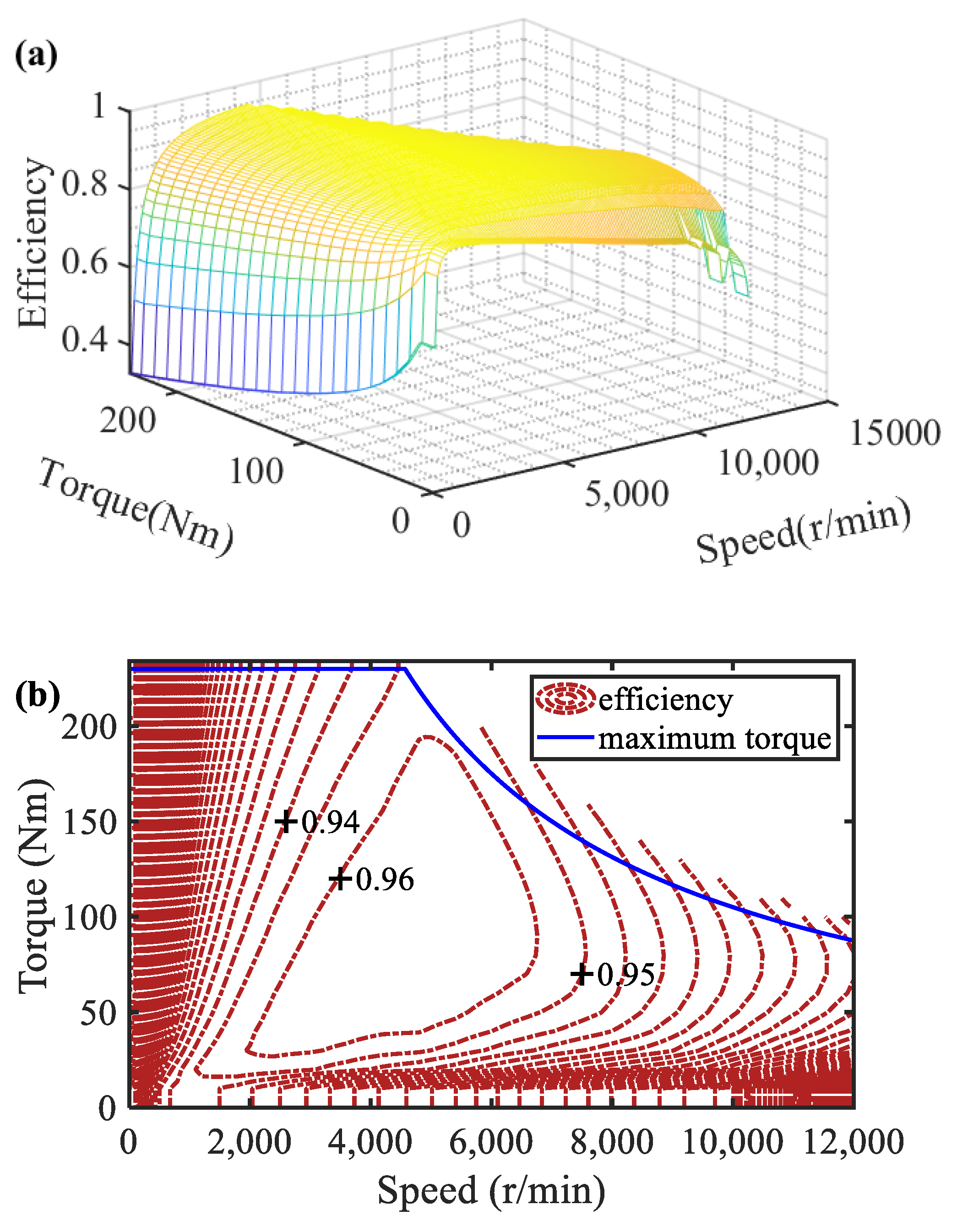
2.2. Electric Motor Model
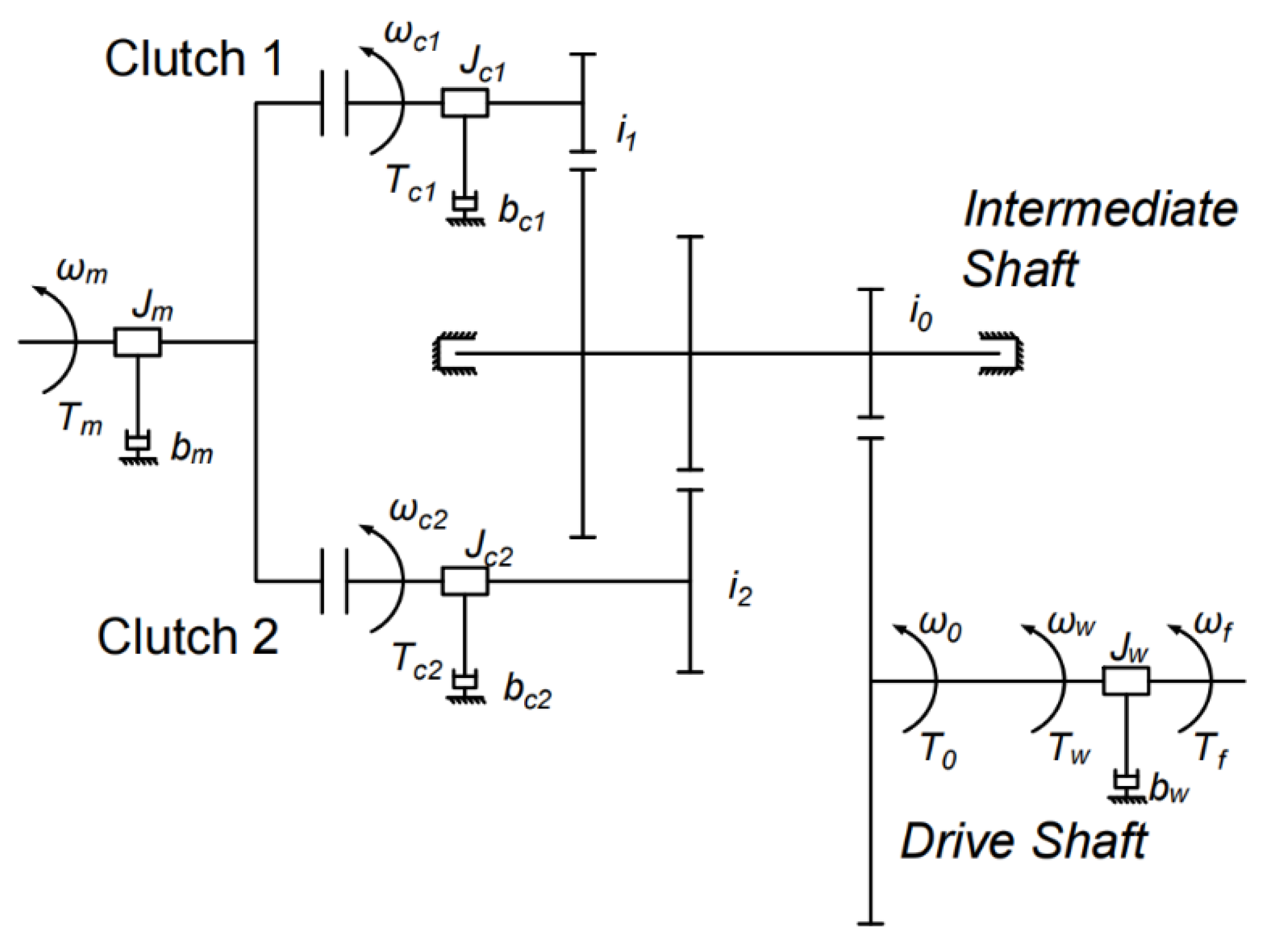
2.3. Transmission Model
2.4. Longitudinal Dynamics Model of Vehicle
3. Gear-Shifting Strategy
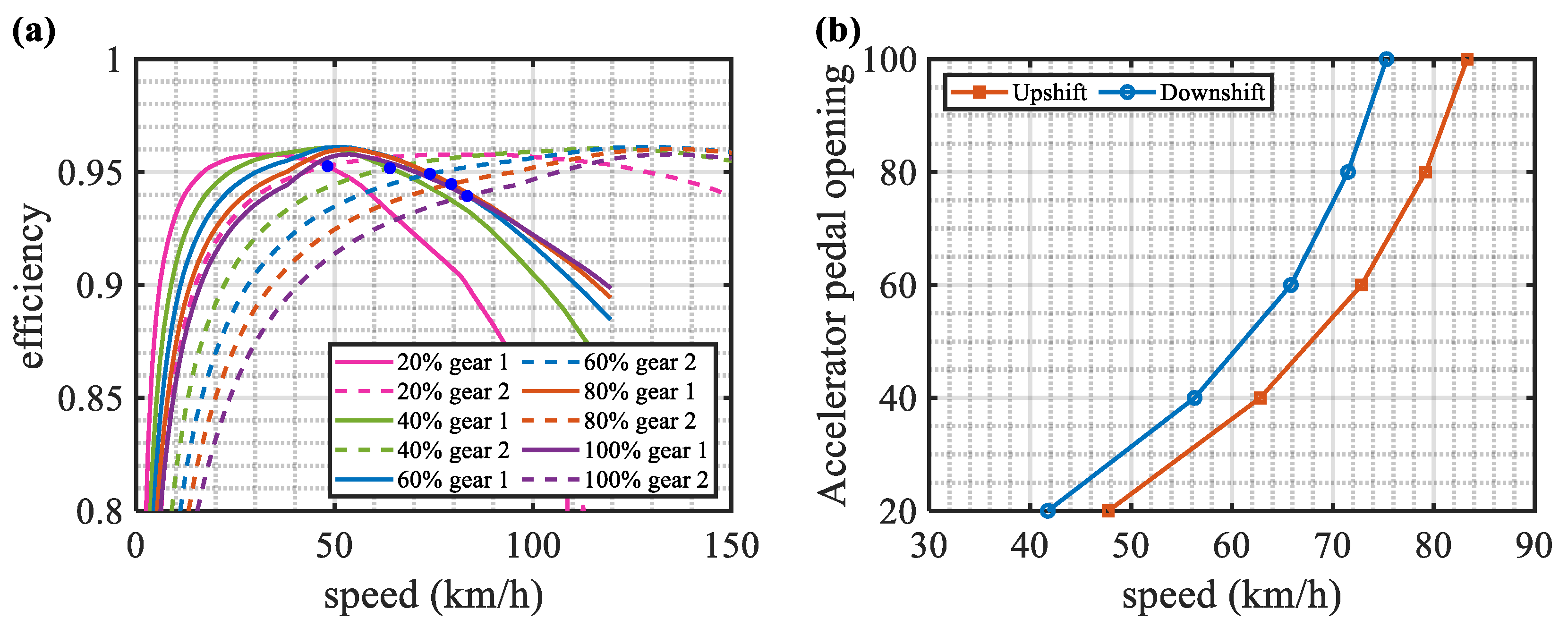
3.1. Economic Gear-Shifting Strategy
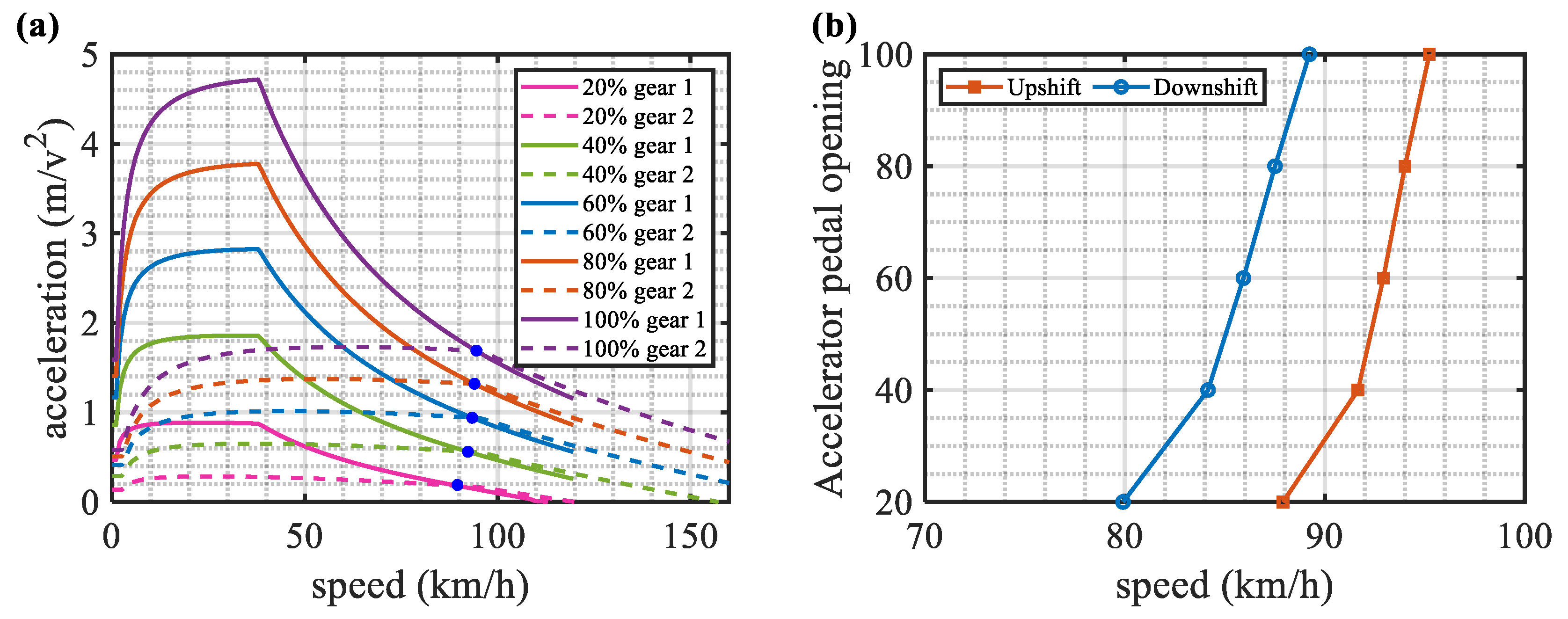
3.2. Dynamic Gear-Shifting Strategy
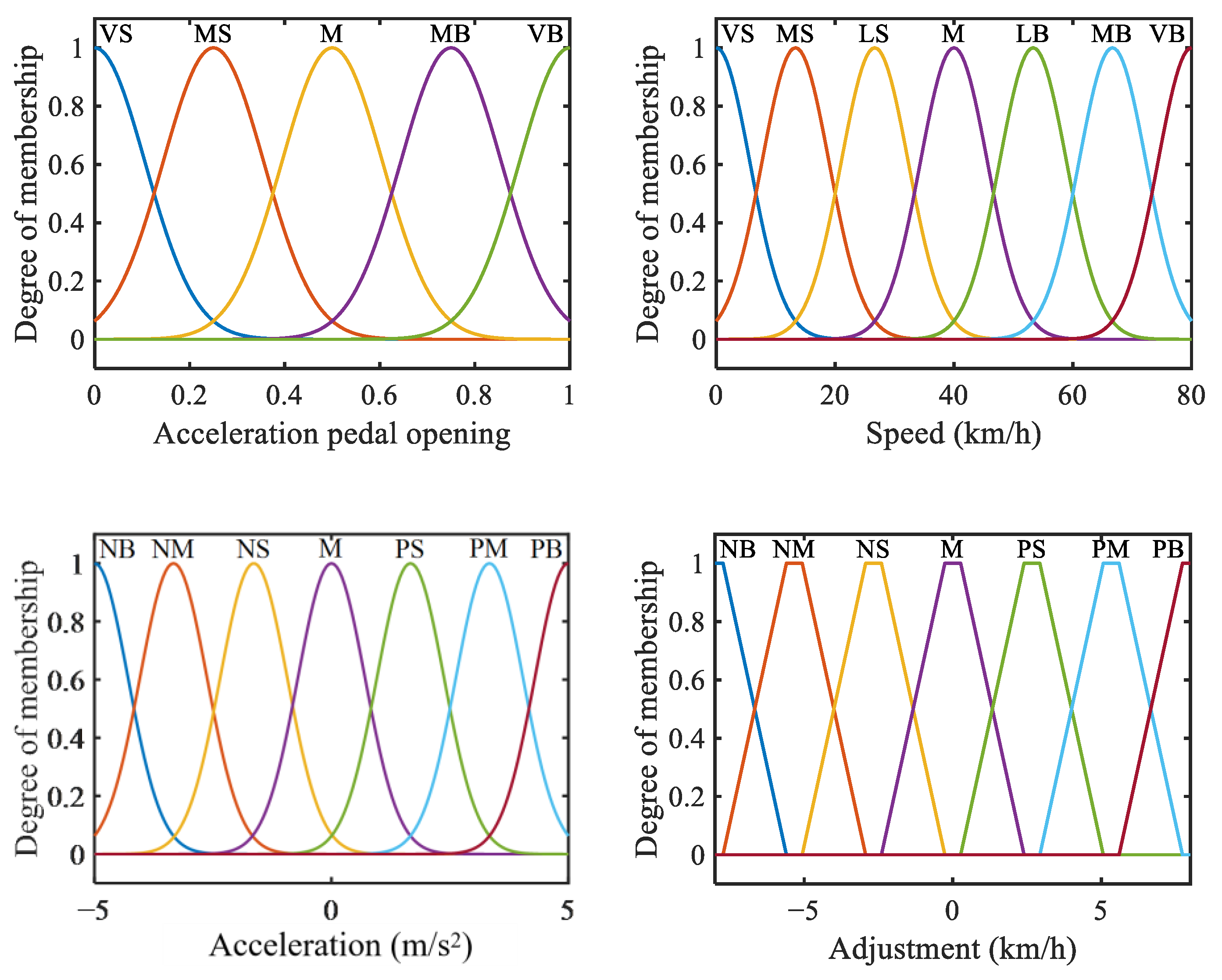
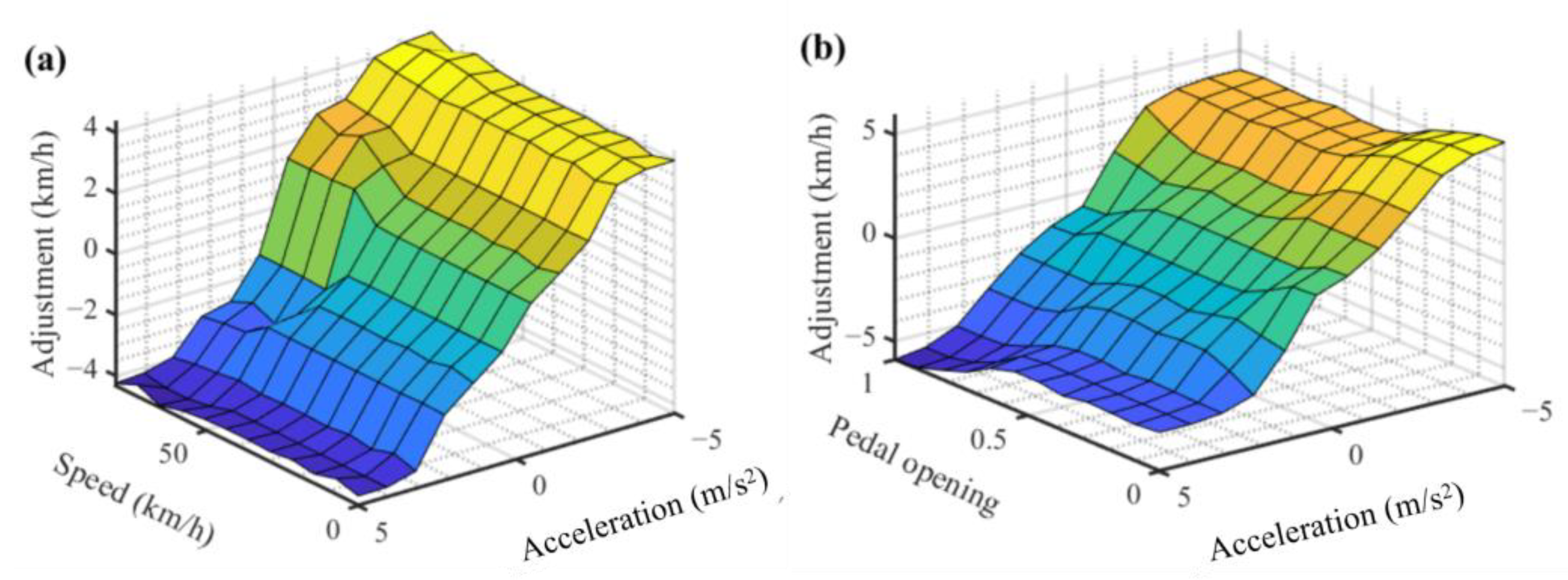
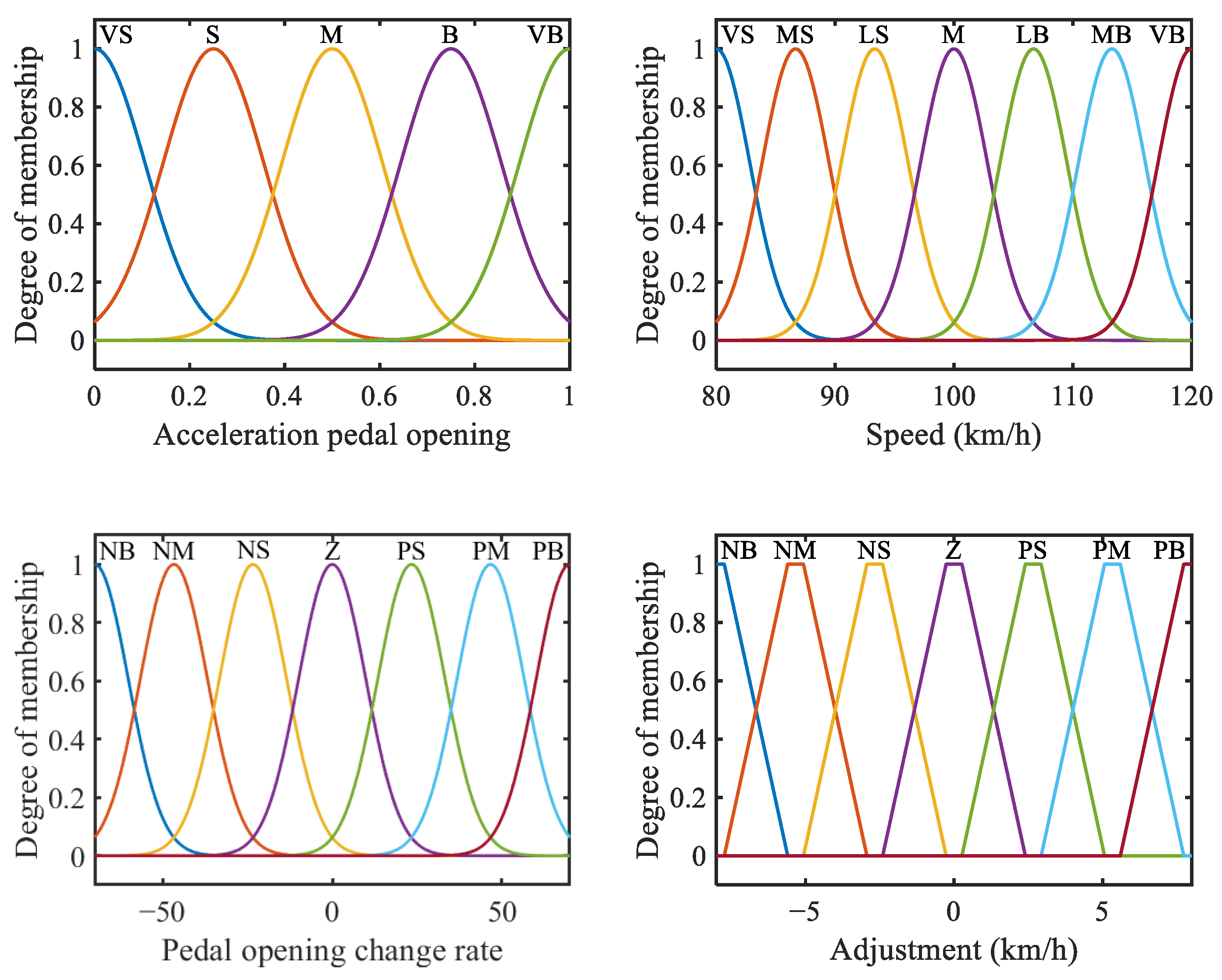
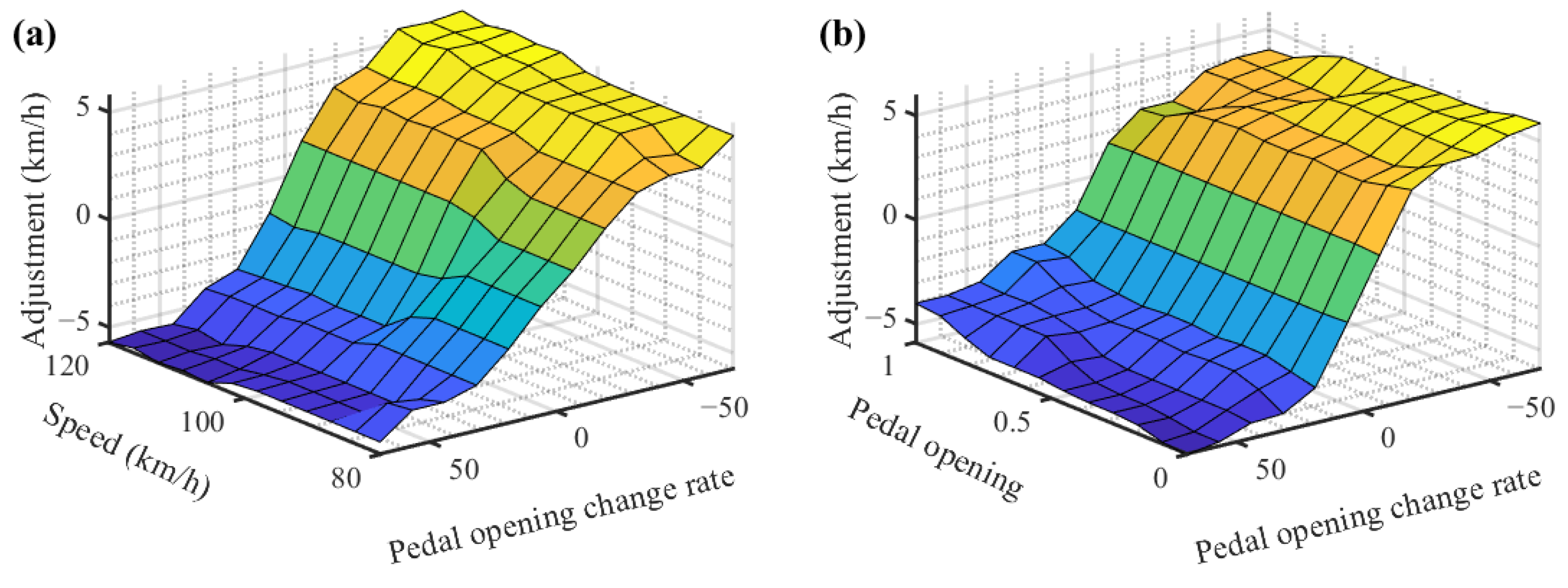
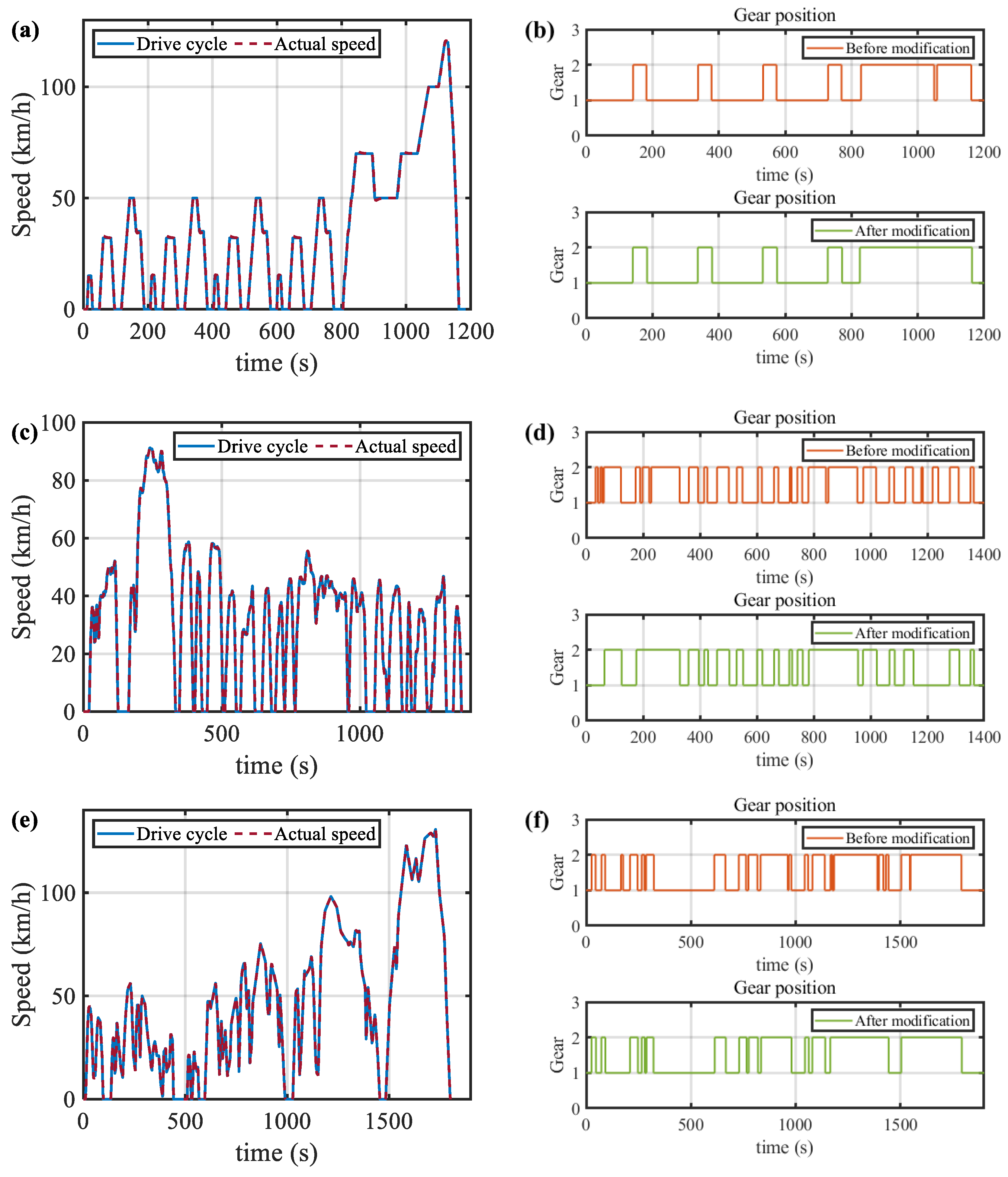
3.3. Gear-Shifting Strategy Online Modification
4. Comparison and Verification
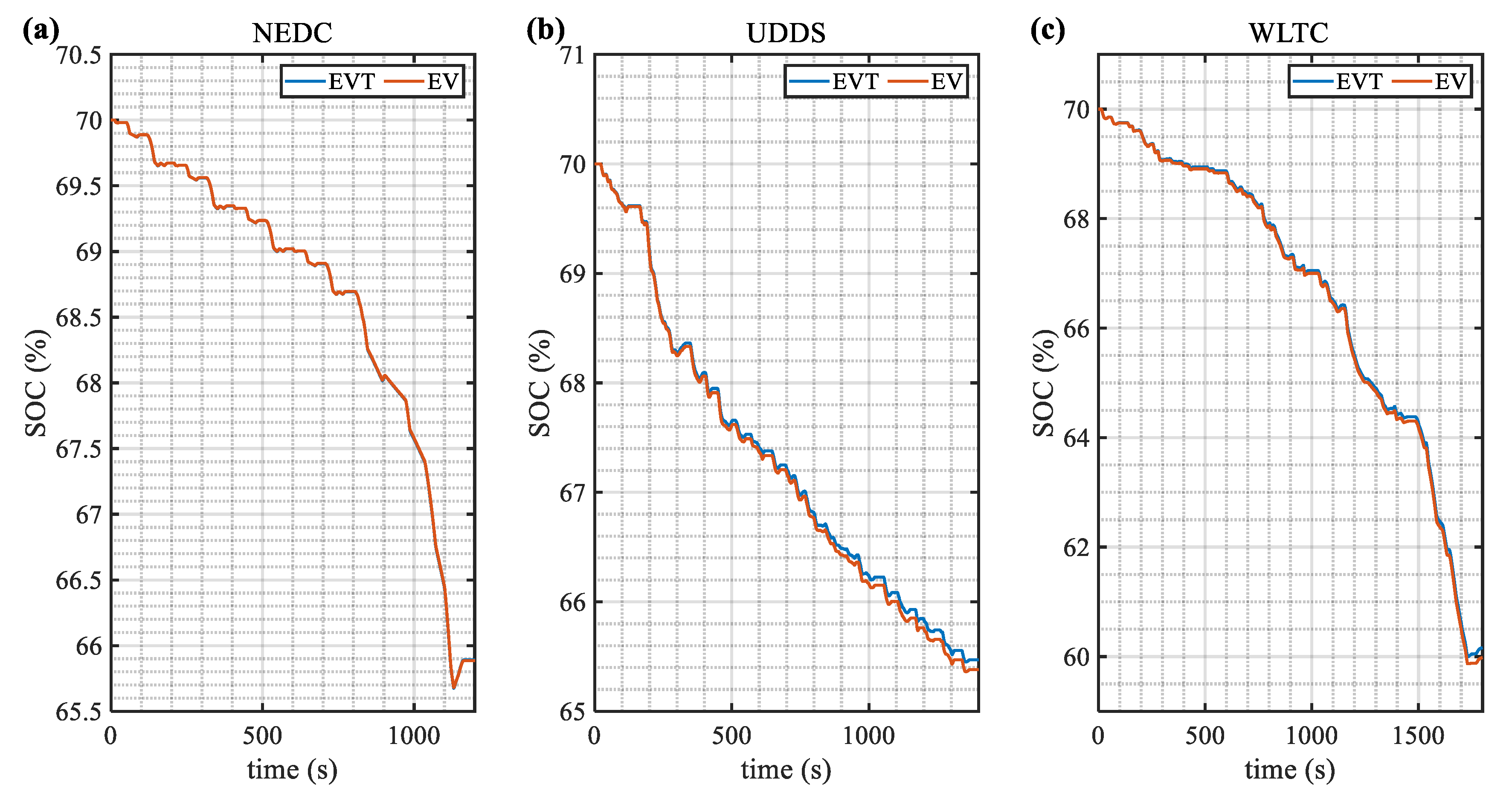
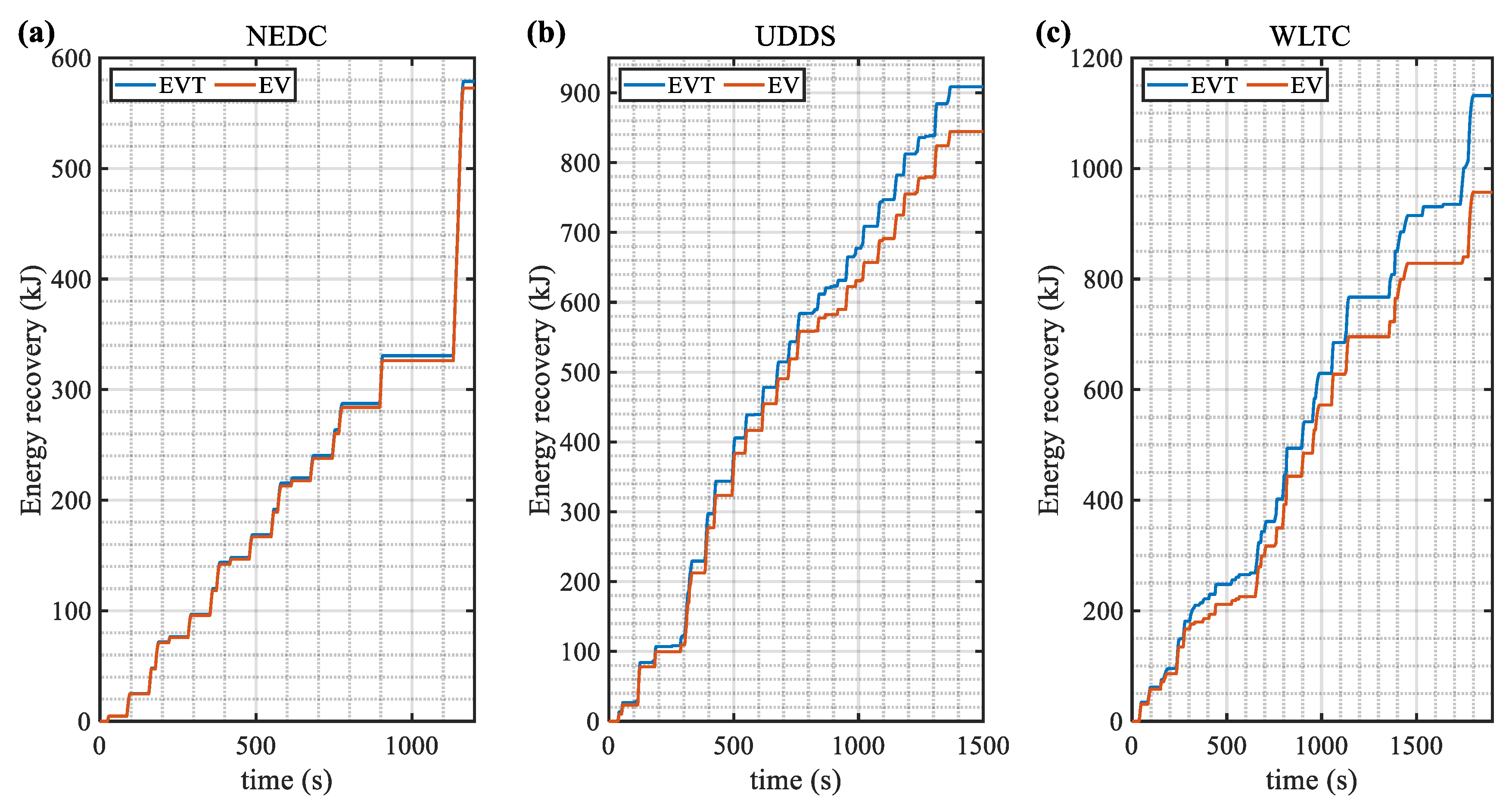
4.1. Comparison of Vehicle Economic Performance
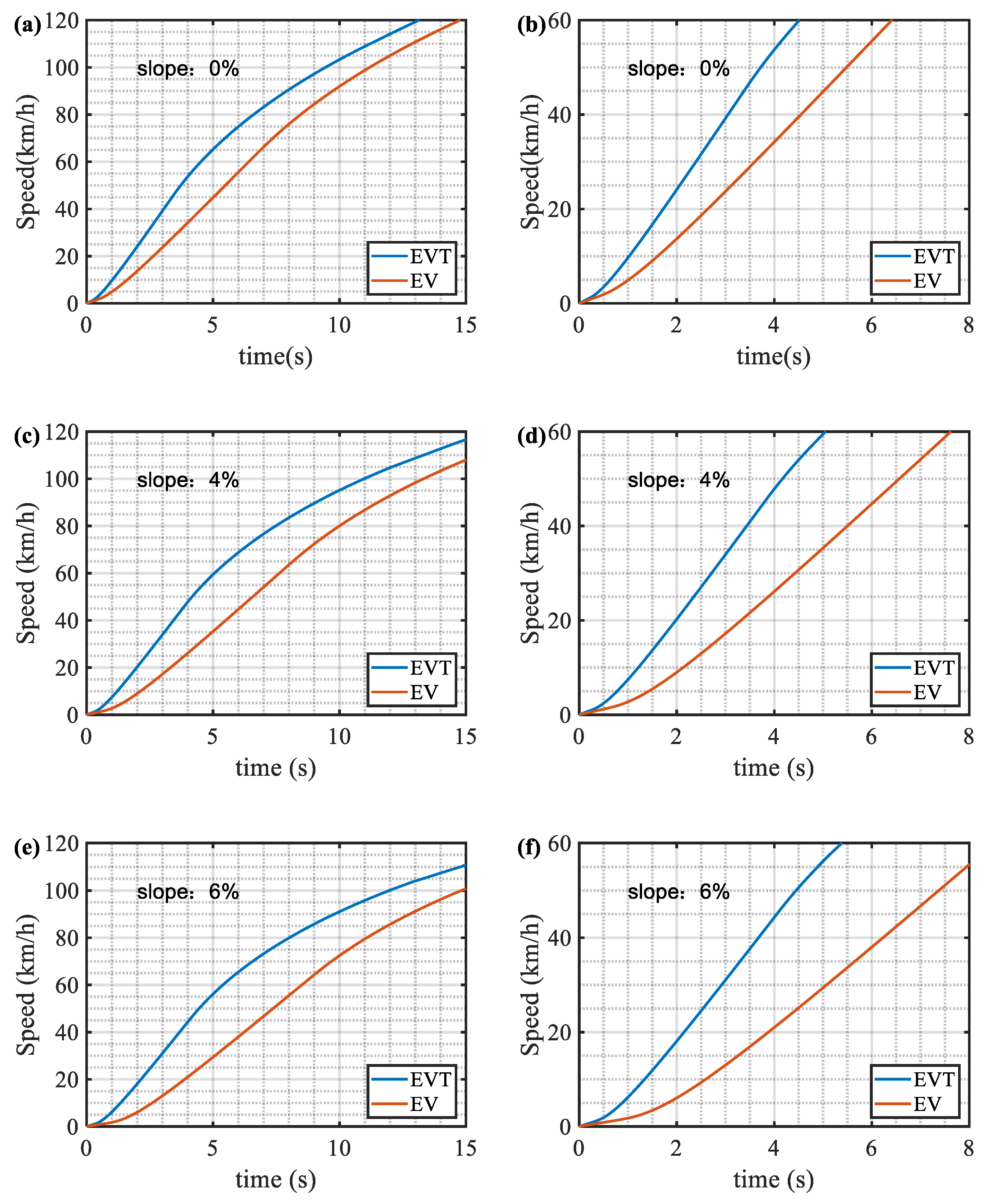
4.2. Comparison of Vehicle Dynamic Performance
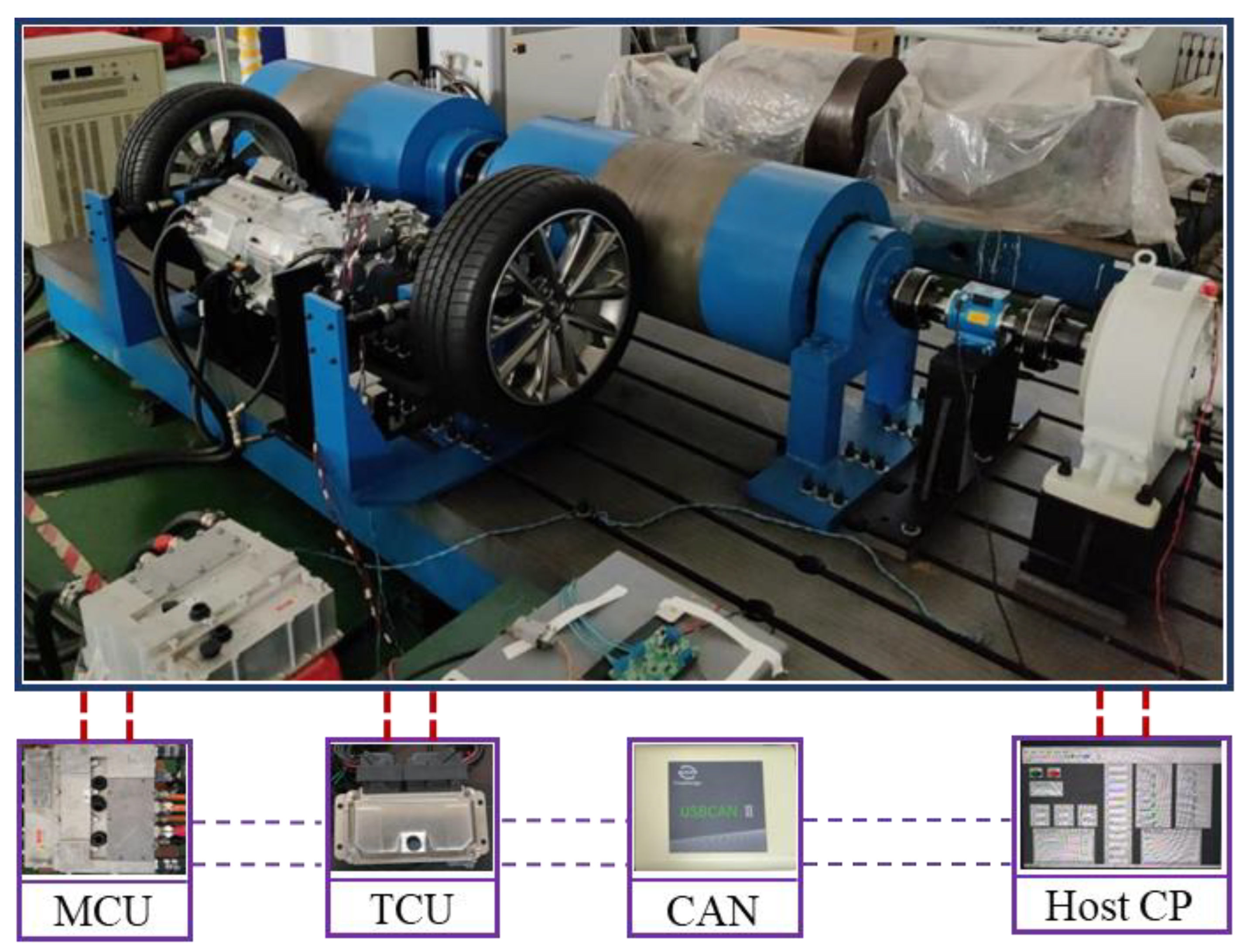
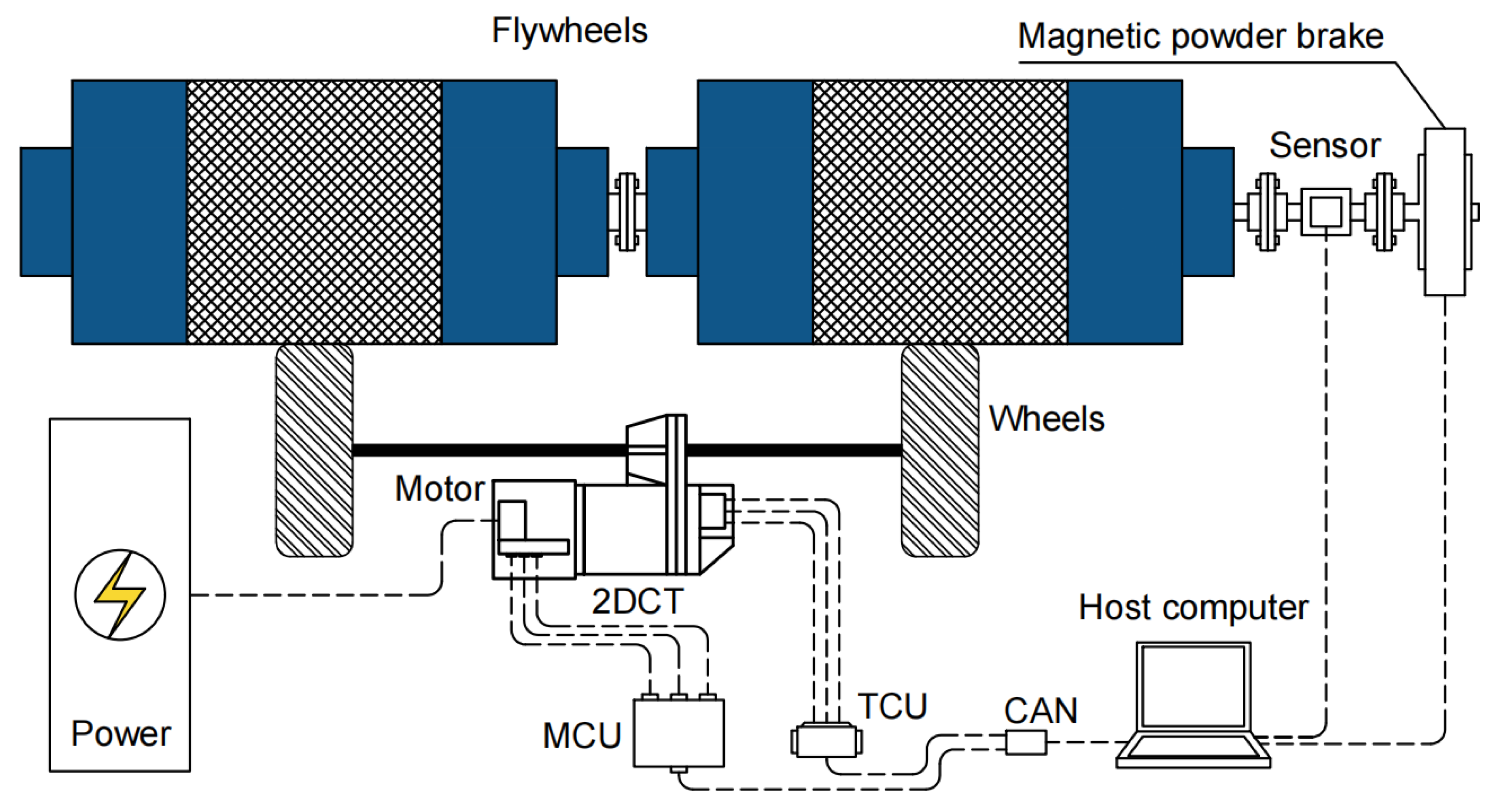
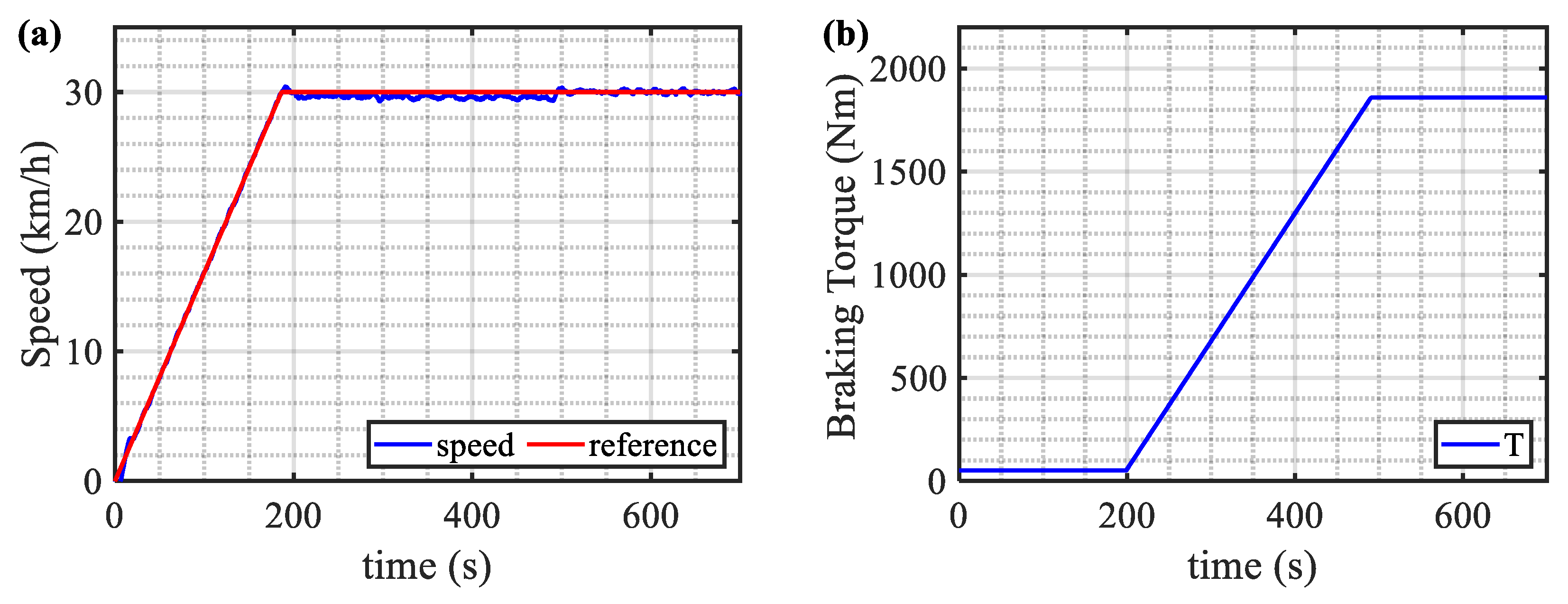
4.3. Rig Testing
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Wei, C.Y.; Sun, X.X.; Chen, Y.; Zang, L.B.; Bai, S.J. Comparison of architecture and adaptive energy management strategy for plug-in hybrid electric logistics vehicle. Energy 2021, 230, 14. [Google Scholar] [CrossRef]
- Nguyen, C.T.; Walker, P.D.; Zhang, N. Shifting strategy and energy management of a two-motor drive powertrain for extended-range electric buses. Mech. Mach. Theory 2020, 153, 17. [Google Scholar] [CrossRef]
- Itani, K.; De Bernardinis, A.; Khatir, Z.; Jammal, A.; Oueidat, M. Regenerative Braking Modeling, Control, and Simulation of a Hybrid Energy Storage System for an Electric Vehicle in Extreme Conditions. IEEE Trans. Transp. Electrif. 2016, 2, 465–479. [Google Scholar] [CrossRef]
- Cai, W.; Wu, X.; Zhou, M.; Liang, Y.; Wang, Y. Review and Development of Electric Motor Systems and Electric Powertrains for New Energy Vehicles. Automot. Innov. 2021, 4, 3–22. [Google Scholar] [CrossRef]
- Sun, X.D.; Shi, Z.; Lei, G.; Guo, Y.G.; Zhu, J.G. Analysis and Design Optimization of a Permanent Magnet Synchronous Motor for a Campus Patrol Electric Vehicle. IEEE Trans. Veh. Technol. 2019, 68, 10535–10544. [Google Scholar] [CrossRef]
- Saw, L.H.; Ye, Y.H.; Tay, A.A.O. Integration issues of lithium-ion battery into electric vehicles battery pack. J. Clean Prod. 2016, 113, 1032–1045. [Google Scholar] [CrossRef]
- Lin, Q.F.; Niu, S.X.; Cai, F.B.; Fu, W.N.; Shang, L.K. Design and Optimization of a Novel Dual-PM Machine for Electric Vehicle Applications. IEEE Trans. Veh. Technol. 2020, 69, 14391–14400. [Google Scholar] [CrossRef]
- You, Y.; Sun, D.Y.; Qin, D.T. Shift strategy of a new continuously variable transmission based wheel loader. Mech. Mach. Theory 2018, 130, 313–329. [Google Scholar] [CrossRef]
- Puricelli, S.; Cardellini, G.; Casadei, S.; Faedo, D.; van den Oever, A.E.M.; Grosso, M. A review on biofuels for light-duty vehicles in Europe. Renew. Sust. Energ. Rev. 2021, 137, 19. [Google Scholar] [CrossRef]
- Hu, J.J.; Ran, H.L.; Pang, T.; Zhang, Y. Parameter design and performance analysis of shift actuator for a two-speed automatic mechanical transmission for pure electric vehicles. Adv. Mech. Eng. 2016, 8, 15. [Google Scholar] [CrossRef] [Green Version]
- Liang, J.; Walker, P.D.; Ruan, J.; Yang, H.T.; Wu, J.L.; Zhang, N. Gearshift and brake distribution control for regenerative braking in electric vehicles with dual clutch transmission. Mech. Mach. Theory 2019, 133, 1–22. [Google Scholar] [CrossRef]
- Hu, M.H.; Chen, L.; Wang, D.Y.; Xu, Z.F.; Xu, P.; Qin, D.T.; Zhou, A.J. Modeling and characteristic study of the shifting engagement process in stepped transmission. Mech. Mach. Theory 2020, 151, 12. [Google Scholar] [CrossRef]
- Qin, D.T.; Yao, M.Y.; Chen, S.J.; Lyu, S.K. Shifting Process Control for Two-Speed Automated Mechanical Transmission of Pure Electric Vehicles. Int. J. Precis. Eng. Manuf. 2016, 17, 623–629. [Google Scholar] [CrossRef]
- Zhu, B.; Zhang, N.; Walker, P.; Zhou, X.X.; Zhan, W.Z.; Wei, Y.Y.; Ke, N.J. Gear shift schedule design for multi-speed pure electric vehicles. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2015, 229, 70–82. [Google Scholar] [CrossRef]
- He, H.W.; Han, M.; Liu, W.; Cao, J.F.; Shi, M.; Zhou, N.N. MPC-based longitudinal control strategy considering energy consumption for a dual-motor electric vehicle. Energy 2022, 253, 16. [Google Scholar] [CrossRef]
- Gao, B.Z.; Liang, Q.; Xiang, Y.; Guo, L.L.; Chen, H. Gear ratio optimization and shift control of 2-speed I-AMT in electric vehicle. Mech. Syst. Signal Proc. 2015, 50-51, 615–631. [Google Scholar] [CrossRef]
- Jeoung, D.; Min, K.H.; Sunwoo, M. Automatic Transmission Shift Strategy Based on Greedy Algorithm Using Predicted Velocity. Int. J. Automot. Technol. 2020, 21, 159–168. [Google Scholar] [CrossRef]
- Lin, C.; Zhao, M.J.; Pan, H.; Yi, J. Blending gear shift strategy design and comparison study for a battery electric city bus with AMT. Energy 2019, 185, 1–14. [Google Scholar] [CrossRef]
- Shen, W.C.; Yu, H.L.; Hu, Y.H.; Xi, J.Q. Optimization of Shift Schedule for Hybrid Electric Vehicle with Automated Manual Transmission. Energies 2016, 9, 220. [Google Scholar] [CrossRef] [Green Version]
- Saini, V.; Singh, S.; Nv, S.; Jain, H. Genetic Algorithm Based Gear Shift Optimization for Electric Vehicles. SAE Int. J. Altern. Powertrains 2016, 5, 348–356. [Google Scholar] [CrossRef]
- Liu, Y.G.; Gao, D.K.; Zhai, K.N.; Huang, Q.; Chen, Z.; Zhang, Y. Coordinated control strategy for braking and shifting for electric vehicle with two-speed automatic transmission. eTransportation 2022, 13, 16. [Google Scholar] [CrossRef]
- Nguyen, C.T.; Walker, P.D.; Zhang, N. Optimization and coordinated control of gear shift and mode transition for a dual-motor electric vehicle. Mech. Syst. Signal Proc. 2021, 158, 18. [Google Scholar] [CrossRef]
- Xu, X.; Liang, J.; Hao, Q.; Dong, P.; Wang, S.; Guo, W.; Liu, Y.; Lu, Z.; Geng, J.; Yan, B. A Novel Electric Dual Motor Transmission for Heavy Commercial Vehicles. Automot. Innov. 2021, 4, 34–43. [Google Scholar] [CrossRef]
- Granovskii, M.; Dincer, I.; Rosen, M.A. Economic and environmental comparison of conventional, hybrid, electric and hydrogen fuel cell vehicles. J. Power Sources 2006, 159, 1186–1193. [Google Scholar] [CrossRef]
- Li, K.B.; Bouscayrol, A.; Han, S.L.; Cui, S.M. Comparisons of Electric Vehicles Using Modular Cascade Machines System and Classical Single Drive Electric Machine. IEEE Trans. Veh. Technol. 2018, 67, 354–361. [Google Scholar] [CrossRef]
- Ragheb, H.; Aydin, M.; El-Gindy, M.; Kishawy, H.A. Comparison of gradability performance of fuel cell hybrid electric and internal-combustion engine vehicles. J. Power Sources 2013, 221, 447–454. [Google Scholar] [CrossRef]
- Wu, J.L.; Liang, J.J.Y.; Ruan, J.G.; Zhang, N.; Walker, P.D. Efficiency comparison of electric vehicles powertrains with dual motor and single motor input. Mech. Mach. Theory 2018, 128, 569–585. [Google Scholar] [CrossRef]
- Spanoudakis, P.; Tsourveloudis, N.C.; Doitsidis, L.; Karapidakis, E.S. Experimental Research of Transmissions on Electric Vehicles’ Energy Consumption. Energies 2019, 12, 388. [Google Scholar] [CrossRef] [Green Version]
- Li, X.Y.; Yuan, C.G.; Wang, Z.P.; He, J.T.; Yu, S.K. Lithium battery state-of-health estimation and remaining useful lifetime prediction based on non-parametric aging model and particle filter algorithm. eTransportation 2022, 11, 11. [Google Scholar] [CrossRef]
- Li, X.Y.; Yuan, C.G.; Wang, Z.P.; Xie, J.L. A data-fusion framework for lithium battery health condition Estimation Based on differential thermal voltammetry. Energy 2022, 239, 13. [Google Scholar] [CrossRef]
- Li, L.; Li, X.J.; Wang, X.Y.; Song, J.; He, K.; Li, C.F. Analysis of downshift’s improvement to energy efficiency of an electric vehicle during regenerative braking. Appl. Energy 2016, 176, 125–137. [Google Scholar] [CrossRef]
- Kim, S.; Oh, J.; Choi, S. Gear shift control of a dual-clutch transmission using optimal control allocation. Mech. Mach. Theory 2017, 113, 109–125. [Google Scholar] [CrossRef]
- Xu, C.; Geyer, S.; Fathy, H.K. Formulation and Comparison of Two Real-Time Predictive Gear Shift Algorithms for Connected/Automated Heavy-Duty Vehicles. IEEE Trans. Veh. Technol. 2019, 68, 7498–7510. [Google Scholar] [CrossRef]
- Huang, R.C.; He, H.W.; Zhao, X.Y.; Wang, Y.L.; Li, M.L. Battery health-aware and naturalistic data-driven energy management for hybrid electric bus based on TD3 deep reinforcement learning algorithm. Appl. Energy 2022, 321, 15. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Parameter | Unit | Value |
|---|---|---|---|
| Vehicle | Vehicle mass (EVT) | kg | 1758 |
| Vehicle mass (EV) | kg | 1730 | |
| Rolling resistance coefficient | 0.0083 | ||
| Rotating mass conversion factor | 1.08 | ||
| Air resistance coefficient | 0.28 | ||
| Vehicle frontal area | m2 | 2.1 | |
| Dynamic radius of the wheel | m | 0.31 | |
| Battery | Rated capacity | Ah | 88.24 |
| Battery voltage | V | 340 | |
| Motor | Peak power | kw | 110 |
| Peak speed | r/min | 12,000 | |
| Peak torque | Nm | 230 | |
| Transmission | First gear ratio | 3 | |
| Second gear ratio | 1.19 | ||
| Final Drive | Final drive ratio (EVT) | 3.91 | |
| Final drive ratio (EV) | 8.28 |
| Drive Cycle | Vehicle Type | Final SOC (%) | Braking Recovery Energy (kJ) |
|---|---|---|---|
| NEDC | EVT | 65.89 | 578.69 |
| EV | 65.88 | 572.64 | |
| UDDS | EVT | 65.47 | 908.43 |
| EV | 65.38 | 844.60 | |
| WLTC | EVT | 60.16 | 1131.90 |
| EV | 59.97 | 957.15 |
| Slope | Vehicle Type | 0~100 km/h (s) | 0~50 km/h (s) |
|---|---|---|---|
| 0% | EVT | 9.45 | 3.72 |
| EV | 11.19 | 5.48 | |
| 4% | EVT | 10.97 | 4.17 |
| EV | 13.32 | 6.57 | |
| 6% | EVT | 11.98 | 4.45 |
| EV | 14.81 | 7.37 |
| Vehicle Type | Max Slope | Max Speed |
|---|---|---|
| EVT | 36% | 228 km/h |
| EV | 25% | 169 km/h |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
He, B.; Chen, Y.; Wei, Q.; Wang, C.; Wei, C.; Li, X. Performance Comparison of Pure Electric Vehicles with Two-Speed Transmission and Adaptive Gear Shifting Strategy Design. Energies 2023, 16, 3007. https://doi.org/10.3390/en16073007
He B, Chen Y, Wei Q, Wang C, Wei C, Li X. Performance Comparison of Pure Electric Vehicles with Two-Speed Transmission and Adaptive Gear Shifting Strategy Design. Energies. 2023; 16(7):3007. https://doi.org/10.3390/en16073007
Chicago/Turabian StyleHe, Bolin, Yong Chen, Qiang Wei, Cong Wang, Changyin Wei, and Xiaoyu Li. 2023. "Performance Comparison of Pure Electric Vehicles with Two-Speed Transmission and Adaptive Gear Shifting Strategy Design" Energies 16, no. 7: 3007. https://doi.org/10.3390/en16073007