
Reliability Enhancement of Fast Charging Station under Electric Vehicle Supply Equipment Failures and Repairs
 , ,
, ,
Abstract
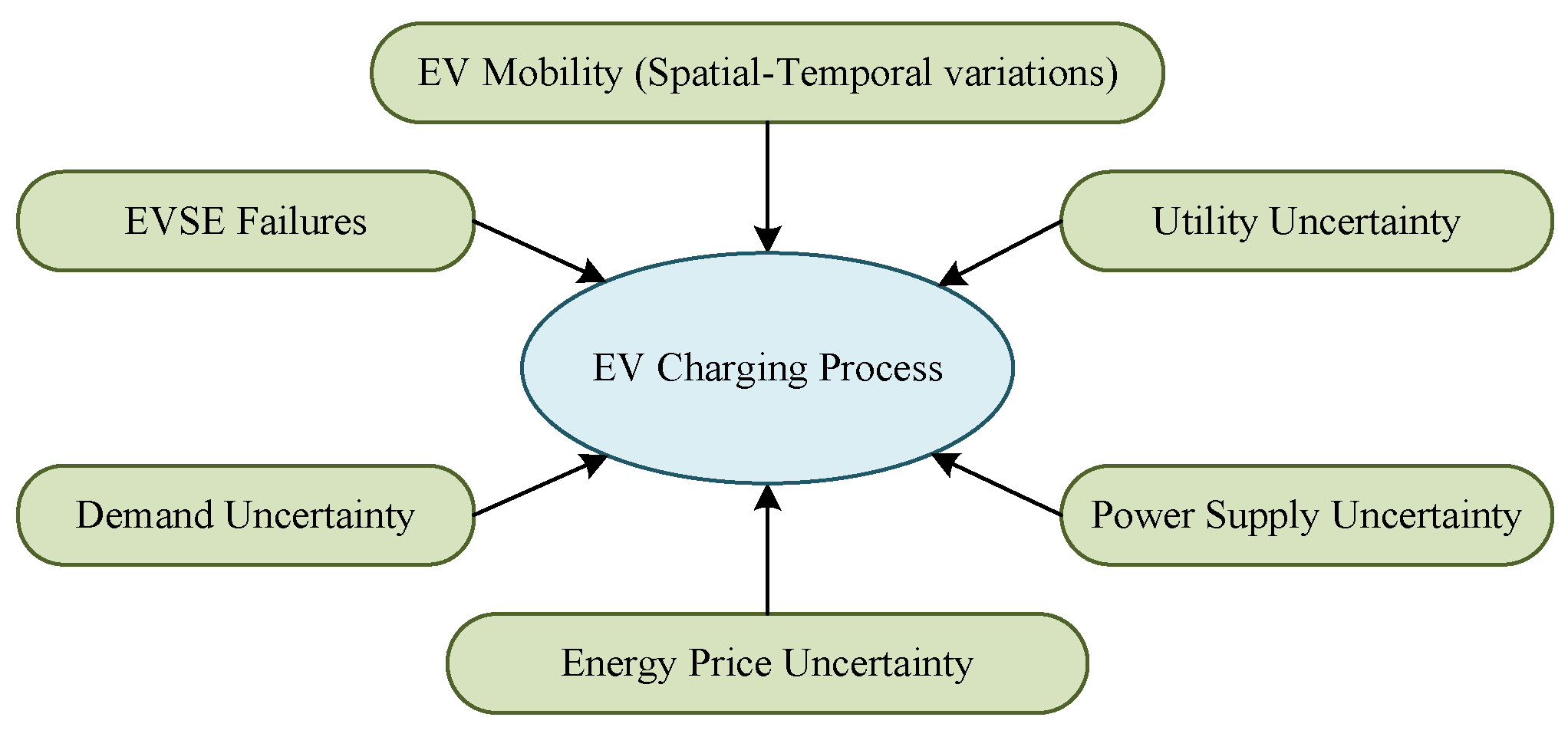
:1. Introduction

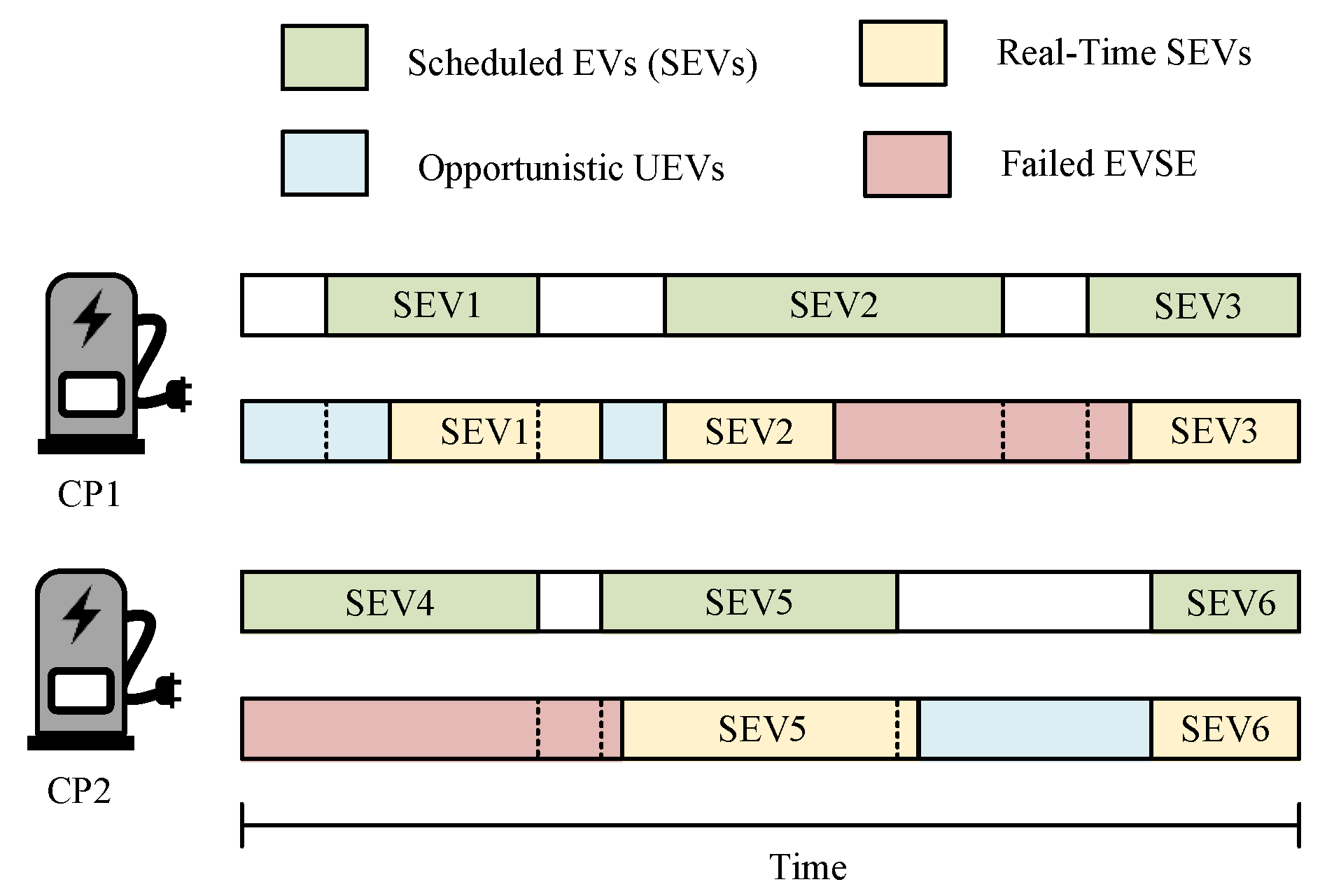
2. Dynamic Charging Resource Allocation under EVSE Failure
3. Methods
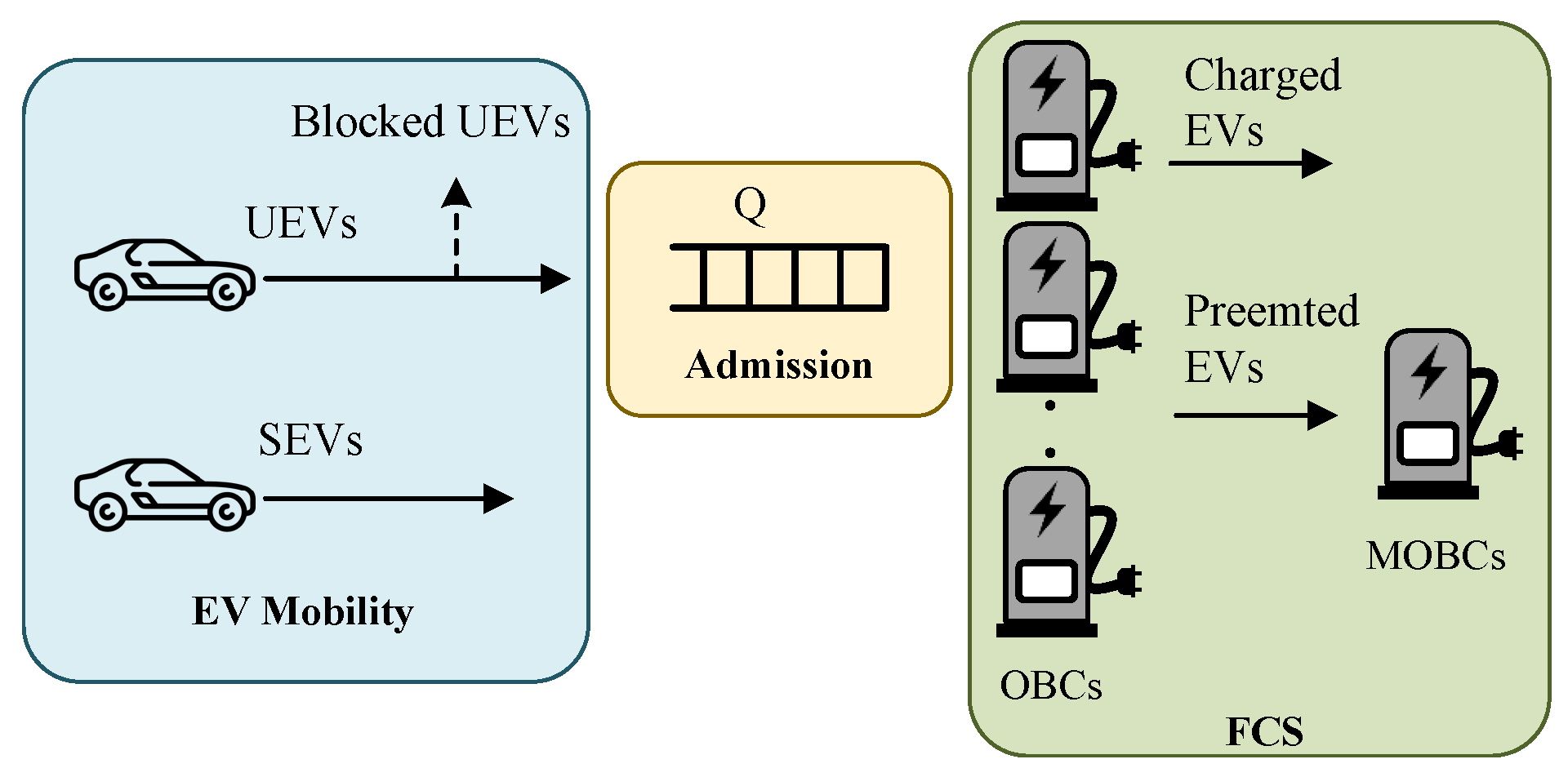
3.1. Stochastic EV Mobility Model
- Both SEV and UEV arrivals are Poisson processes with mean arrival rates of and , respectively. ( denotes the average number of charging requests made by the respective category of EVs per unit time);
- All OBCs and MOBCs are homogeneous and the service time of an EVSE is exponentially distributed with the service rate of . ( rate denotes the average number of charged EVs per EVSE per unit time);
- All failures are homogeneous. The inter-failure time (during which an OBC functions well) of an OBC is exponentially distributed with a failure rate of per EVSE;
- The repair time of an OBC is exponentially distributed, with a repair rate per EVSE of .
3.2. Dynamic Charging Coordination Model
3.2.1. Arrivals of EVs at FCS
3.2.2. Departures of EVs from FCS
3.2.3. EVSE Failures and Repairs
3.3. FCS Centric Performance Evaluation Parameters
3.3.1. Availability of FCS for EVs
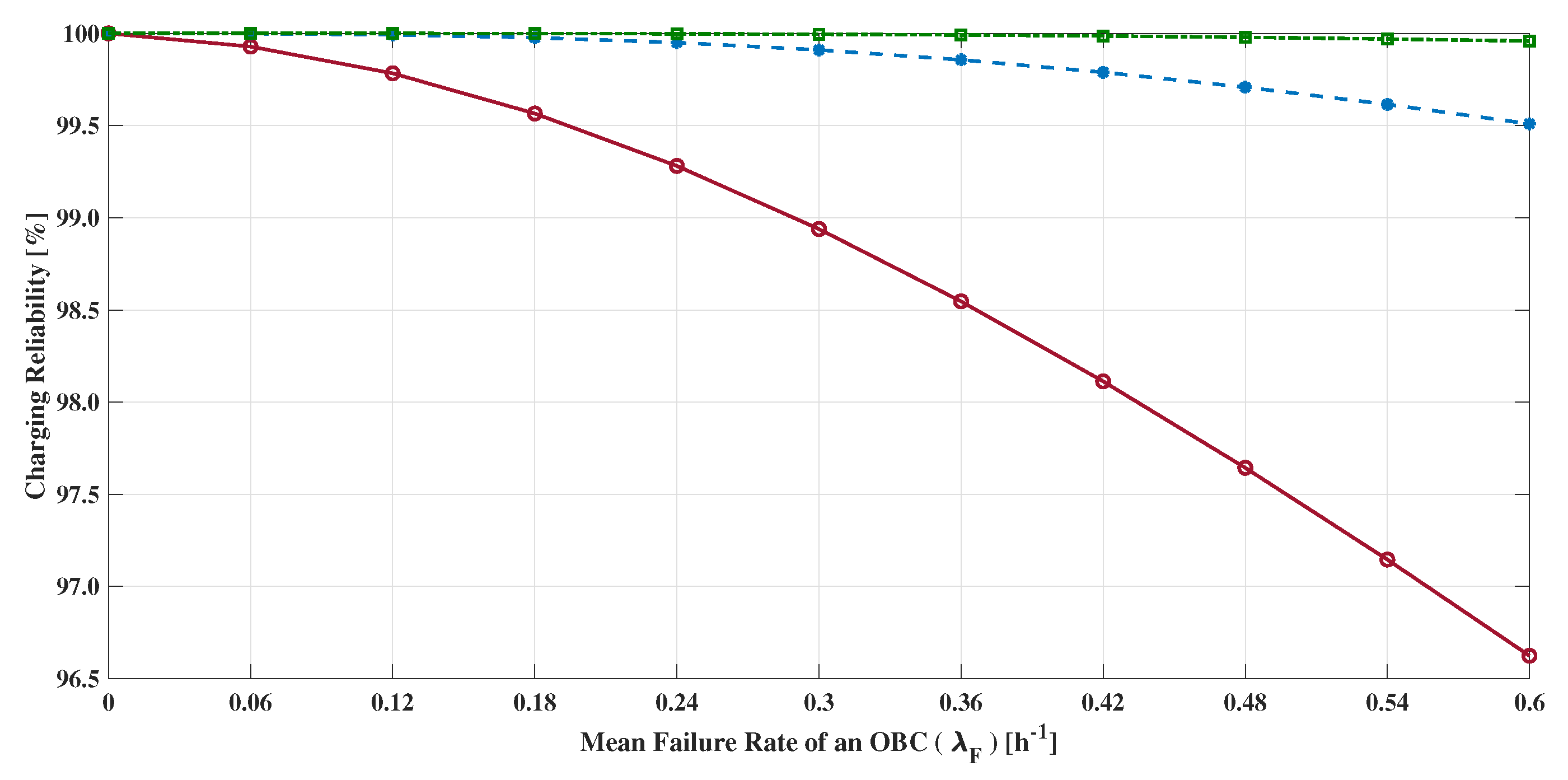
3.3.2. Reliability of Charging Process
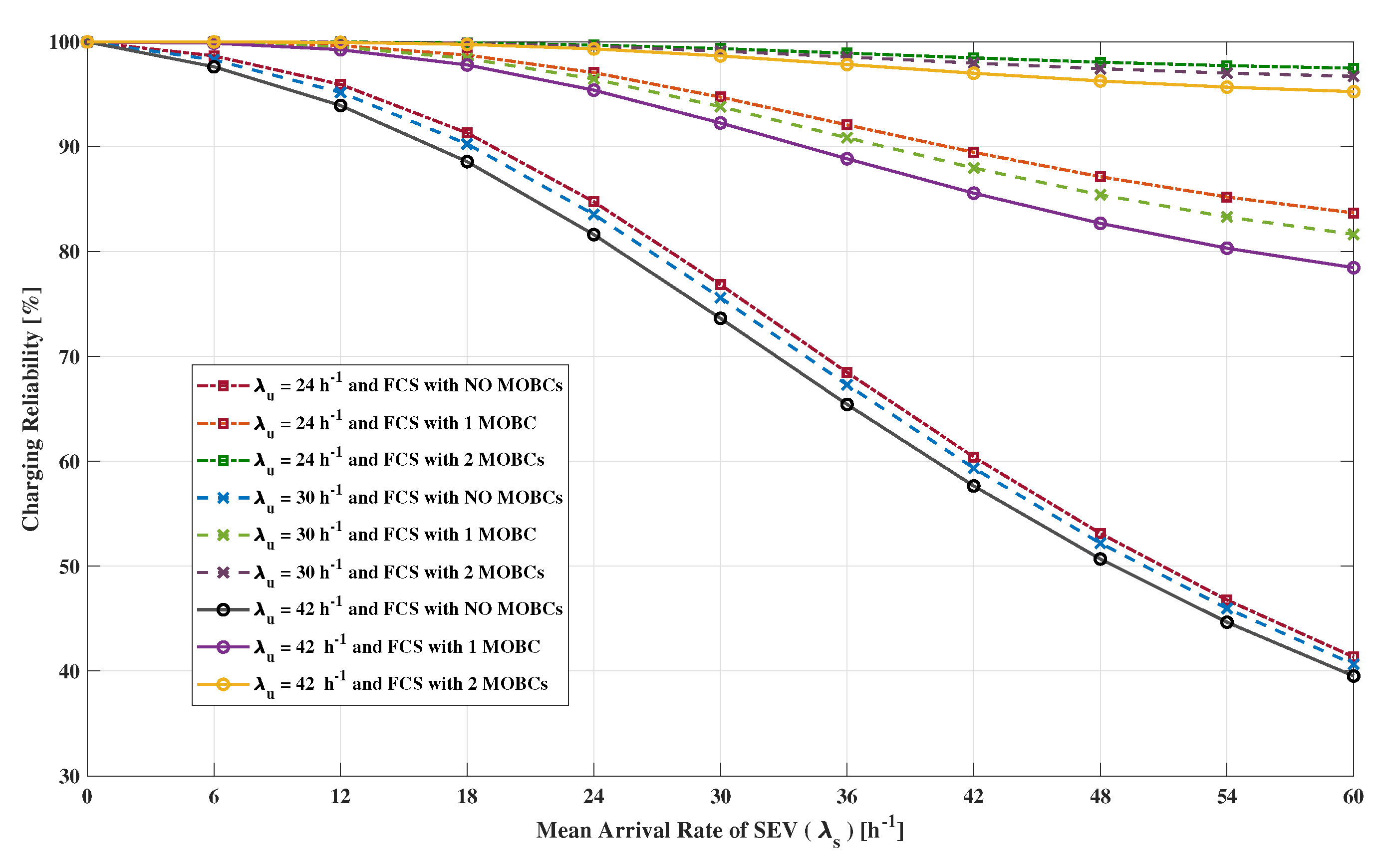
4. Results and Discussion
4.1. Reliability of UEVs
4.2. Reliability of SEVs
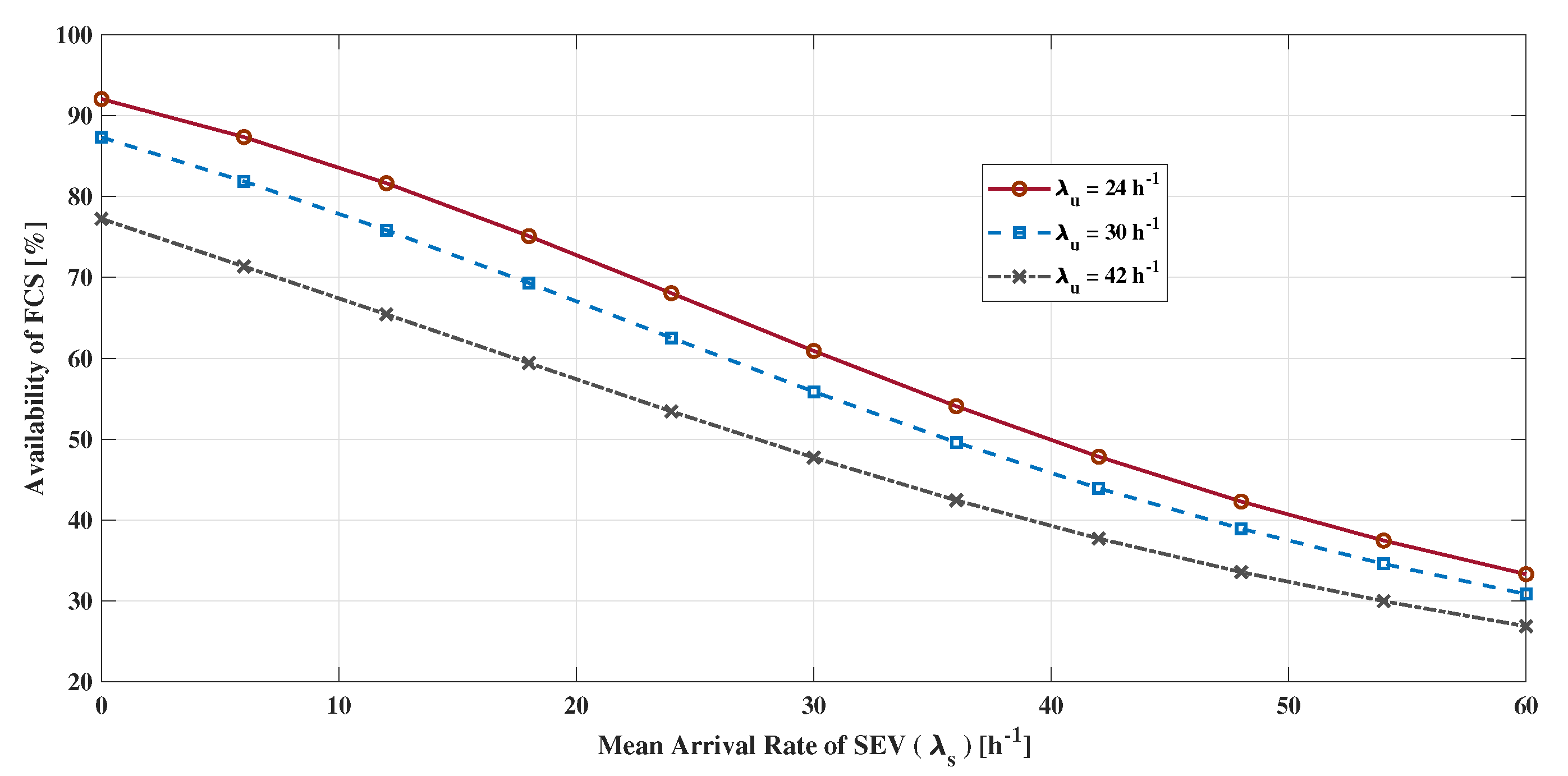
4.3. Availability of FCS SEVs
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| EV | Electric vehicle |
| CS | Charging station |
| FCS | Fast charging station |
| SEV | Scheduled EV user |
| OEV | Opportunistic ultra-fast charging EV user |
| EVSE | EV supply equipment |
| OBC | Off-board EV charger |
| MOBC | Mobile Off-board EV charger |
| CP | Charging point |
| QP | Queue point |
| CTMC | Continuous-time Markov chain |
| RES | Renewable energy system |
| ES | Energy storage |
| ASEV | Arrival of a SEV |
| AUEV | Arrival of a UEV |
| DSEV | Departure of a SEV |
| DUEV | Departure of a UEV |
| FSEV | A failure of SEV connected EVSE |
| FUEV | A failure of UEV connected EVSE |
| TR | Transition rate |
| ST | State transition |
References
- Transforming Our World: The 2030 Agenda for Sustainable Development. 2021. Available online: https://sdgs.un.org/2030agenda (accessed on 18 July 2022).
- Liu, Y.; Dong, H.; Wang, S.; Lan, M.; Zeng, M.; Zhang, S.; Yang, M.; Yin, S. An Optimization Approach Considering User Utility for the PV-Storage Charging Station Planning Process. Processes 2020, 8, 83. [Google Scholar] [CrossRef] [Green Version]
- IEA. Global EV Outlook 2021; IEA: Paris, France, 2021. Available online: //www.iea.org/reports/global-ev-outlook-2021 (accessed on 18 July 2022).
- Irle, R. Global EV Sales for 2021. 2021. Available online: http://www.ev-volumes.com/country/total-world-plug-in-vehicle-volumes/ (accessed on 18 July 2022).
- Hannan, M.A.; Hoque, M.M.; Hussain, A.; Yusof, Y.; Ker, P.J. State-of-the-art and energy management system of lithium-ion batteries in electric vehicle applications: Issues and recommendations. IEEE Access 2018, 6, 19362–19378. [Google Scholar] [CrossRef]
- Das, U.K.; Shrivastava, P.; Tey, K.S.; Bin Idris, M.Y.I.; Mekhilef, S.; Jamei, E.; Seyedmahmoudian, M.; Stojcevski, A. Advancement of lithium-ion battery cells voltage equalization techniques: A review. Renew. Sustain. Energy Rev. 2020, 134, 110227. [Google Scholar] [CrossRef]
- Cano, Z.P.; Banham, D.; Ye, S.; Hintennach, A.; Lu, J.; Fowler, M.; Chen, Z. Batteries and fuel cells for emerging electric vehicle markets. Nat. Energy 2018, 3, 279–289. [Google Scholar] [CrossRef]
- Gan, X.; Zhang, H.; Hang, G.; Qin, Z.; Jin, H. Fast-Charging Station Deployment Considering Elastic Demand. IEEE Trans. Transp. Electrif. 2020, 6, 158–169. [Google Scholar] [CrossRef]
- Muneer, T.; Kolhe, M.; Doyle, A. Electric Vehicles: Prospects and Challenges; Elsevier: Amsterdam, The Netherlands, 2017. [Google Scholar]
- Tu, H.; Feng, H.; Srdic, S.; Lukic, S. Extreme Fast Charging of Electric Vehicles: A Technology Overview. IEEE Trans. Transp. Electrif. 2019, 5, 861–878. [Google Scholar] [CrossRef]
- Wang, L.; Qin, Z.; Slangen, T.; Bauer, P.; Van Wijk, T. Grid Impact of Electric Vehicle Fast Charging Stations: Trends, Standards, Issues and Mitigation Measures—An Overview. IEEE Open J. Power Electron. 2021, 2, 56–74. [Google Scholar] [CrossRef]
- Pieltain Fernández, L.; Gomez San Roman, T.; Cossent, R.; Mateo Domingo, C.; Frías, P. Assessment of the Impact of Plug-in Electric Vehicles on Distribution Networks. IEEE Trans. Power Syst. 2011, 26, 206–213. [Google Scholar] [CrossRef]
- Rafi, M.A.H.; Bauman, J. A Comprehensive Review of DC Fast-Charging Stations with Energy Storage: Architectures, Power Converters, and Analysis. IEEE Trans. Transp. Electrif. 2021, 7, 245–368. [Google Scholar] [CrossRef]
- Konara, K.M.S.Y.; Kolhe, M.L.; Sharma, A. Power Dispatching Techniques as a Finite State Machine for a Standalone Photovoltaic System with a Hybrid Energy Storage. AIMS Energy 2020, 8, 214–230. [Google Scholar] [CrossRef]
- Konara, K.M.S.Y.; Kolhe, M.L.; Sharma, A. Power Flow Management Controller within a Grid Connected Photovoltaic Based Active Generator as a Finite State Machine using Hierarchical Approach with Droop Characteristics. Renew. Energy 2020, 155, 1021–1031. [Google Scholar] [CrossRef]
- Ahmed, S.; Bloom, I.; Jansen, A.N.; Tanim, T.; Dufek, E.J.; Pesaran, A.; Burnham, A.; Carlson, R.B.; Dias, F.; Hardy, K. Enabling fast charging—A battery technology gap assessment. J. Power Sources 2017, 367, 250–262. [Google Scholar] [CrossRef]
- IEC 61851-1:2017; Electric Vehicle Conductive Charging System. IEC: Geneva, Switzerland, 2017; p. 1.
- IEC 62196:2014; Plugs, Socket-Outlets, Vehicle Connectors and Vehicle Inlets—Conductive Charging of Electric Vehicles. IEC: Geneva, Switzerland, 2014; p. 1.
- Nimalsiri, N.I.; Mediwaththe, C.P.; Ratnam, E.L.; Shaw, M.; Smith, D.B.; Halgamuge, S.K. A Survey of Algorithms for Distributed Charging Control of Electric Vehicles in Smart Grid. IEEE Trans. Intell. Transp. Syst. 2019, 21, 4497–4515. [Google Scholar] [CrossRef] [Green Version]
- Zheng, Y.; Niu, S.; Shang, Y.; Shao, Z.; Jian, L. Integrating plug-in electric vehicles into power grids: A comprehensive review on power interaction mode, scheduling methodology and mathematical foundation. Renew. Sustain. Energy Rev. 2015, 51, 648–661. [Google Scholar] [CrossRef]
- Mukherjee, J.C.; Gupta, A. Review of Charge Scheduling of Electric Vehicles in Smart Grid. IEEE Syst. J. 2015, 9, 1541–1553. [Google Scholar] [CrossRef]
- Xu, Z.; Su, W.; Hu, Z.; Song, Y.; Zhang, H. A Hierarchical Framework for Coordinated Charging of Plug-In Electric Vehicles in China. IEEE Trans. Smart Grid 2016, 7, 428–438. [Google Scholar] [CrossRef]
- Qi, W.; Xu, Z.; Shen, Z.-J.M.; Hu, Z.; Song, Y. Hierarchical coordinated control of plug-in electric vehicles charging in multifamily dwellings. IEEE Trans. Smart Grid 2014, 5, 1465–1474. [Google Scholar] [CrossRef]
- Vandael, S.; Claessens, B.; Hommelberg, M.; Holvoet, T.; Deconinck, G. A Scalable Three-Step Approach for Demand Side Management of Plug-in Hybrid Vehicles. IEEE Trans. Smart Grid 2013, 4, 720–728. [Google Scholar] [CrossRef] [Green Version]
- Molderink, A.; Bakker, V.; Bosman, M.G.C.; Hurink, J.L.; Smit, G.J.M. Management and control of domestic smart grid technology. IEEE Trans. Smart Grid 2010, 1, 109–119. [Google Scholar] [CrossRef] [Green Version]
- Mukherjee, J.C.; Gupta, A. Distributed charge scheduling of plug-in electric vehicles using inter-aggregator collaboration. IEEE Trans. Smart Grid 2017, 8, 331–341. [Google Scholar] [CrossRef]
- Ghosh, A.; Aggarwal, V. Control of Charging of Electric Vehicles Through Menu-Based Pricing. IEEE Trans. Smart Grid 2018, 4, 5918–5929. [Google Scholar] [CrossRef] [Green Version]
- Alinia, B.; Hajiesmaili, M.H.; Crespi, N. Online EV Charging Scheduling With On-Arrival Commitment. IEEE Trans. Intell. Transp. Syst. 2019, 21, 4524–4537. [Google Scholar] [CrossRef]
- Konara, K.M.S.Y.; Kolhe, M.L. Priority Based Coordinated Electric Vehicle Charging System for Heterogeneous Traffic. In Proceedings of the 5th International Conference on Smart and Sustainable Technologies (SpliTech), Split, Croatia, 23–26 September 2020. [Google Scholar]
- Konara, K.M.S.Y.; Kolhe, M.L. Queue Based Dynamic Charging Resource Allocation and Coordination for Heterogeneous Traffic in an Electrical Vehicle Charging Station, Energy Sources. Energy Source Part A 2021, 1–18. [Google Scholar] [CrossRef]
- Konara, K.M.S.Y.; Kolhe, M.L.; Ulltveit-Moe, N.; Balapuwaduge, I.A.M. Optimal Utilization of Charging Resources of Fast Charging Station with Opportunistic Electric Vehicle Users. Batteries 2023, 9, 140. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SEVs | UEVs |
|---|---|
| • Pre-scheduled charging process | • Opportunistic charging |
| • Charged at specified charge rate | • Charged at specified higher charge rate |
| , | |
| • Charger is guaranteed on | • Charger is assigned if sufficient |
| arrival. | resources are available only. |
| • Hardly subject to blockages | • Subject to blockages |
| • Charging process regularly finishes. | • Charging process is liable to be preempted |
| before regularly finishes. | |
| • Prioritized users at the MOBCs | • Charging process is liable to be preempted |
| at the MOBCs. | |
| • Expect uninterruptible EV charging | • Expect to charge as quickly as possible |
| Conditions | Destination State | ST Rate | |
|---|---|---|---|
| ASEVs, at least one idle OBC | ; | ||
| ASEVs, FCS is full. UEVs exist. | ; ; | ||
| idle MOBC exist | ; | ||
| ASEVs, FCS is full. UEVs exist | ; ; | ||
| No idle MOBCs | ; | ||
| ASEVs, FCS is full. UEVs exist | ; | ||
| No idle MOBCs | ; | ||
| ASEVs, FCS is full. No UEVs | ; ; | ||
| AUEVs, at least one idle OBC | |||
| Enough CRs available | |||
| AUEVs, FCS is full. | ; | ||
| Conditions | Destination State | ST Rate | |
|---|---|---|---|
| DSEVs from an OBC | ; | ||
| DUEVs from an OBC | ; | ||
| DSEVs from an MOBC | ; | ||
| DUEVs from an MOBC | ; | ||
| Conditions | Destination State | ST Rate | |
|---|---|---|---|
| Idle EVSE Failure | ; | ||
| FSEVs, idle OBC exists | ; | ||
| FSEVs, no idle OBC | ; | ||
| idle MOBC exists | ; | ||
| FSEVs, no idle MOBC | ; | ||
| UEVs are at MOBCs | ; | ||
| FSEVs, no idle MOBC | ; | ||
| No UEVs are at MOBCs | ; | ||
| FUEVs, idle OBC exists | ; | ||
| FUEVs, no idle OBC | ; | ||
| idle MOBC exists | ; | ||
| FUEVs, no idle MOBC | ; | ||
| ; | |||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Konara, K.M.S.Y.; Kolhe, M.L.; Ulltveit-Moe, N.; Balapuwaduge, I.A.M. Reliability Enhancement of Fast Charging Station under Electric Vehicle Supply Equipment Failures and Repairs. Energies 2023, 16, 2933. https://doi.org/10.3390/en16062933
Konara KMSY, Kolhe ML, Ulltveit-Moe N, Balapuwaduge IAM. Reliability Enhancement of Fast Charging Station under Electric Vehicle Supply Equipment Failures and Repairs. Energies. 2023; 16(6):2933. https://doi.org/10.3390/en16062933
Chicago/Turabian StyleKonara, Konara Mudiyanselage Sandun Y., Mohan Lal Kolhe, Nils Ulltveit-Moe, and Indika A. M. Balapuwaduge. 2023. "Reliability Enhancement of Fast Charging Station under Electric Vehicle Supply Equipment Failures and Repairs" Energies 16, no. 6: 2933. https://doi.org/10.3390/en16062933