
An Adaptive-Gain Sliding Mode Observer with Precise Compensation for Sensorless Control of PMSM
Abstract
:1. Introduction
2. Conventional SMO
2.1. Mathematical Model of PMSM
2.2. Conventional SMO with Constant Gain and Saturation Function
- (1)
- The limitation of the observable speed range caused by constant gain: The most prominent problem with constant gain is that it cannot meet the needs of a wide speed range. If the gain is too large, it will cause severe chattering at low speeds. If the gain is too small, the stability condition cannot be satisfied at high speeds, and the SMO cannot work normally.
- (2)
- The delay problem caused by the continuous switching function: Using a continuous function as the switching function will inevitably cause a certain phase delay, especially at high speeds. This is unfavorable for realizing high-precision sensorless control.
3. Improved SMO with Adaptive-Gain
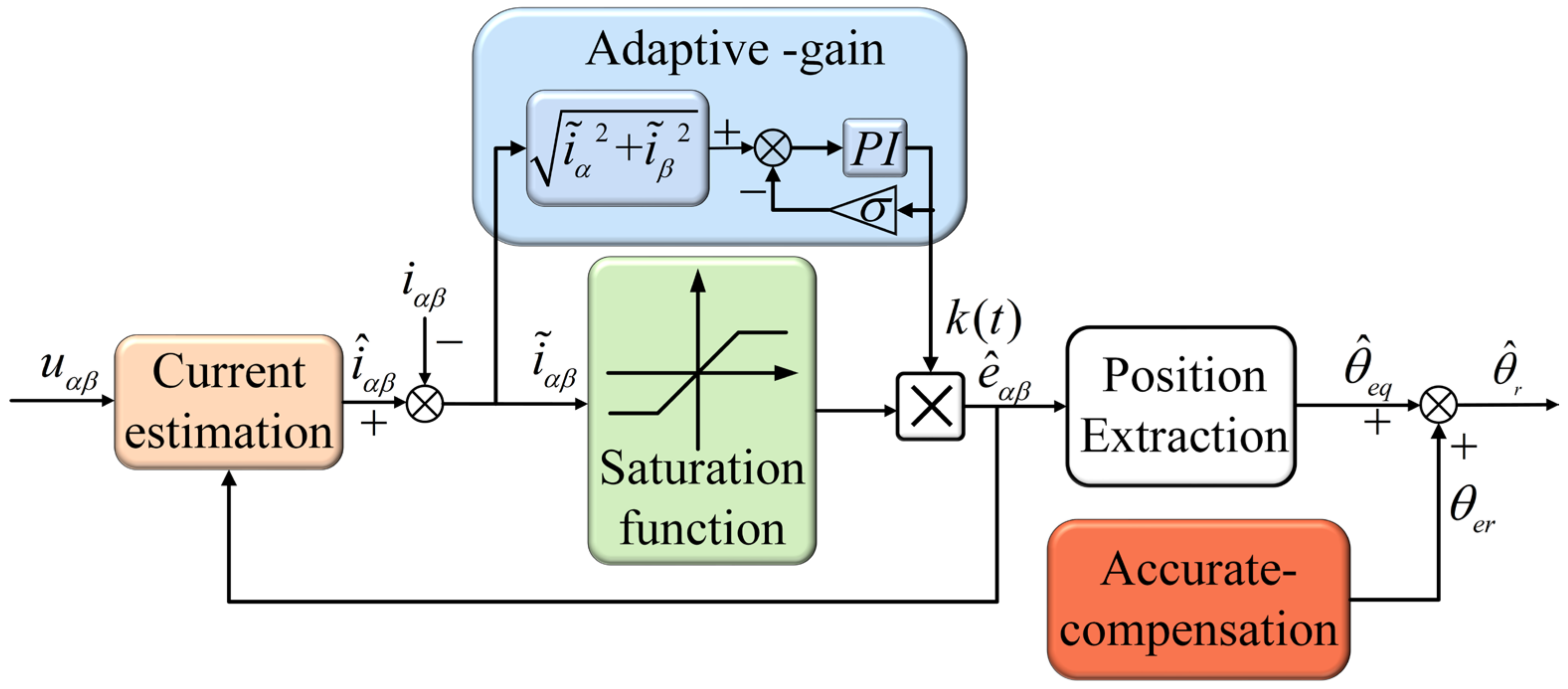
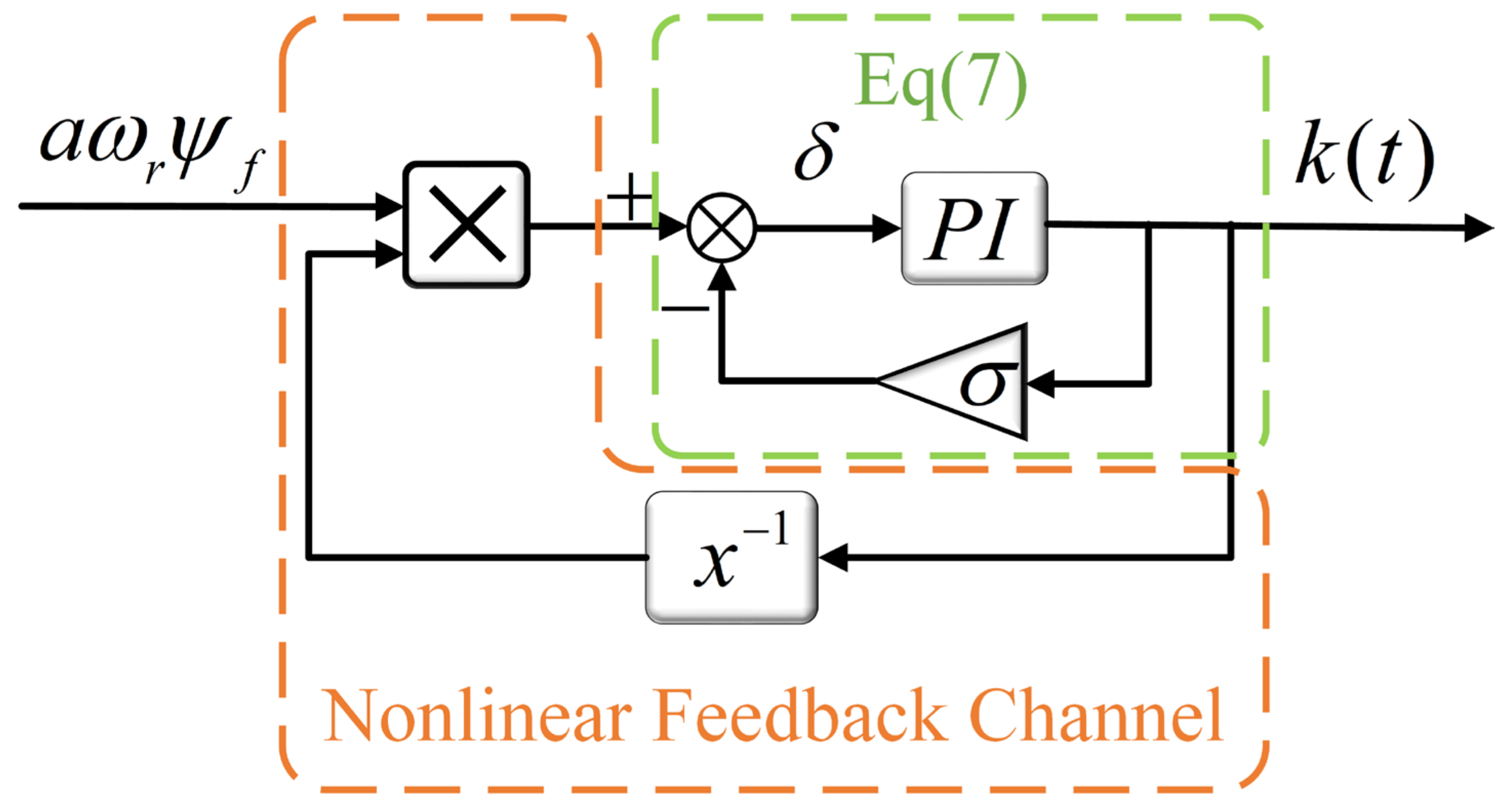
3.1. Adaptive-Gain SMO
3.2. Stability Analysis of ASMO
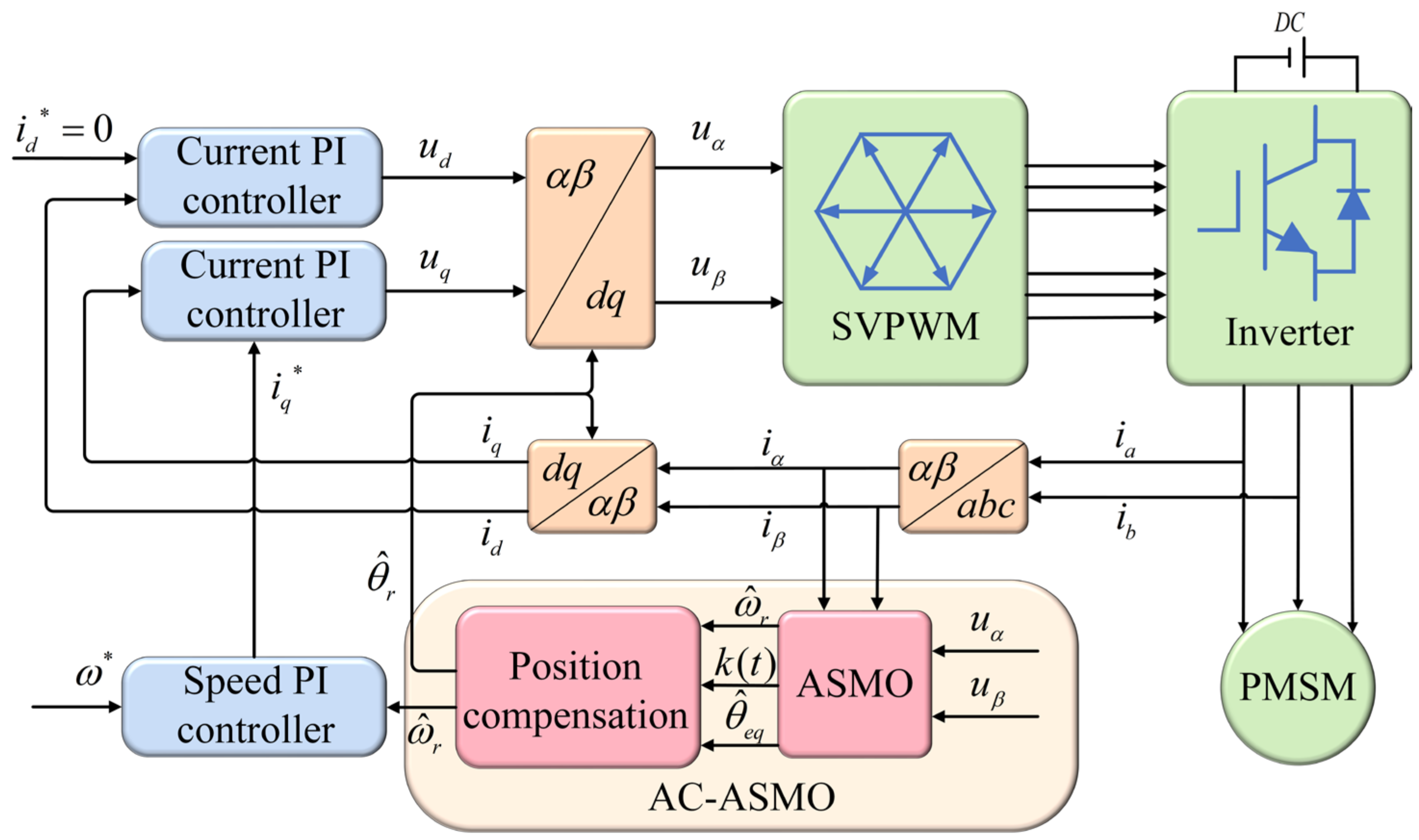
3.3. Position and Speed Extraction
4. Delay Effect Analysis and Precise Compensation
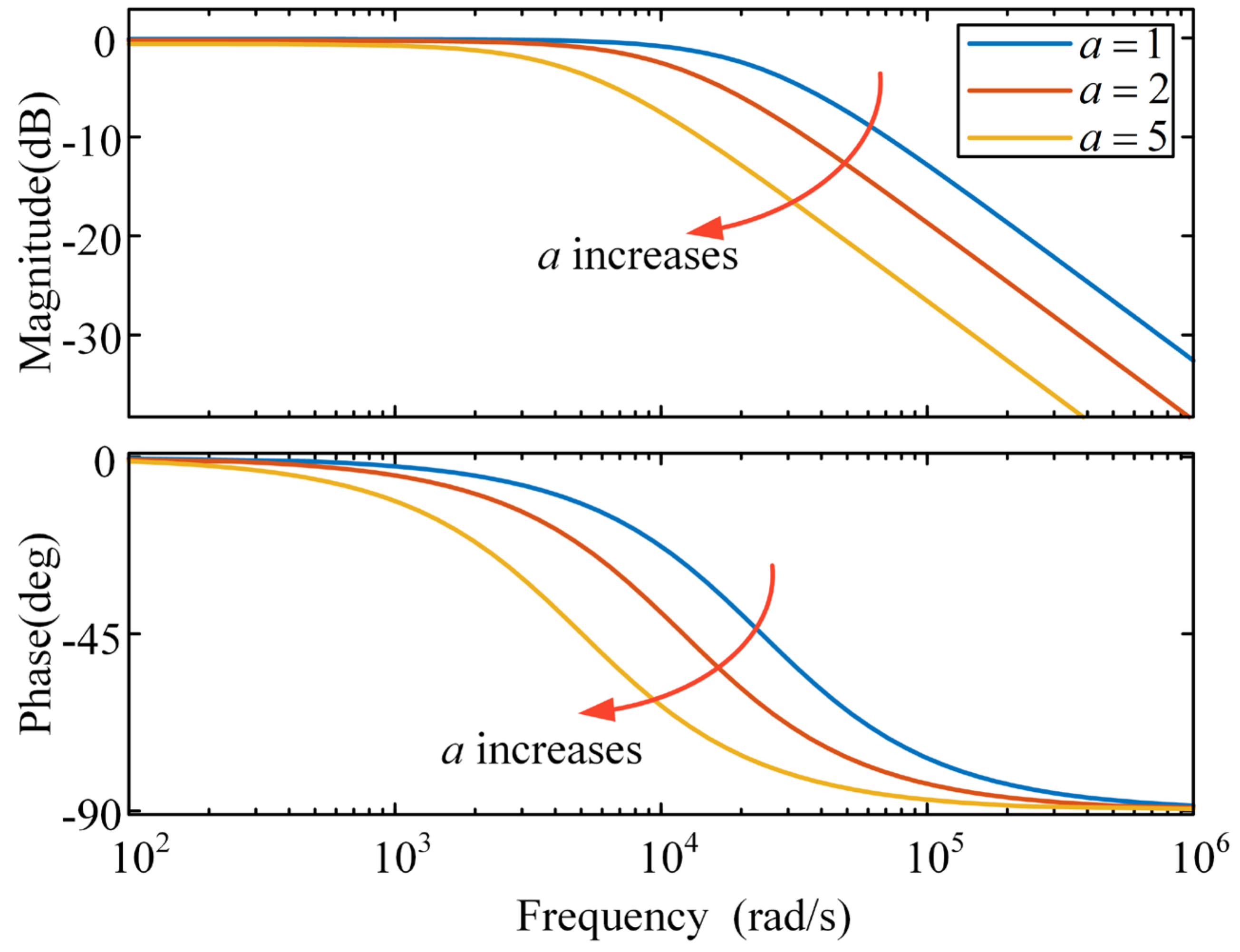
4.1. Delay Effect Analysis
4.2. Compensation Calculation
5. Experimental Results
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- El-Refaie, A.M. Fractional-slot concentrated-windings synchronous permanent magnet machines: Opportunities and challenges. IEEE Trans. Ind. Electron. 2009, 57, 107–121. [Google Scholar] [CrossRef]
- Zhou, Y.; Xue, Z. Analytical method for calculating the magnetic field of spoke-type permanent magnet machines accounting for eccentric magnetic pole. IEEE Trans. Ind. Electron. 2020, 68, 2096–2107. [Google Scholar] [CrossRef]
- Pacas, M. Sensorless drives in industrial applications. IEEE Ind. Electron. Mag. 2011, 5, 16–23. [Google Scholar] [CrossRef]
- Xu, P.L.; Zhu, Z.Q. Novel carrier signal injection method using zero-sequence voltage for sensorless control of PMSM drives. IEEE Trans. Ind. Electron. 2015, 63, 2053–2061. [Google Scholar] [CrossRef]
- Kim, S.; Ha, J.I.; Sul, S.K. PWM switching frequency signal injection sensorless method in IPMSM. IEEE Trans. Ind. Appl. 2012, 48, 1576–1587. [Google Scholar] [CrossRef]
- Li, H.; Zhang, X.; Yang, S.; Liu, S. Unified graphical model of high-frequency signal injection methods for PMSM sensorless control. IEEE Trans. Ind. Electron. 2019, 67, 4411–4421. [Google Scholar] [CrossRef]
- Repecho, V.; Waqar, J.B.; Biel, D.; Dòria-Cerezo, A. Zero speed sensorless scheme for permanent magnet synchronous machine under decoupled sliding-mode control. IEEE Trans. Ind. Electron. 2021, 69, 1288–1297. [Google Scholar] [CrossRef]
- Sreejith, R.; Singh, B. Sensorless predictive current control of PMSM EV drive using DSOGI-FLL based sliding mode observer. IEEE Trans. Ind. Electron. 2020, 68, 5537–5547. [Google Scholar] [CrossRef]
- Wang, G.; Ding, L.; Li, Z.; Xu, J.; Zhang, G.; Zhan, H.; Ni, R.; Xu, D. Enhanced position observer using second-order generalized integrator for sensorless interior permanent magnet synchronous motor drives. IEEE Trans. Energy Convers. 2014, 29, 486–495. [Google Scholar]
- Zhang, X. Sensorless induction motor drive using indirect vector controller and sliding-mode observer for electric vehicles. IEEE Trans. Veh. Technol. 2013, 62, 3010–3018. [Google Scholar] [CrossRef]
- Comanescu, M. Design and implementation of a highly robust sensorless sliding mode observer for the flux magnitude of the induction motor. IEEE Trans. Energy Convers. 2016, 31, 649–657. [Google Scholar] [CrossRef]
- Bernard, P.; Praly, L. Estimation of position and resistance of a sensorless PMSM: A nonlinear Luenberger approach for a nonobservable system. IEEE Trans. Autom. Control 2020, 66, 481–496. [Google Scholar] [CrossRef]
- Kwon, T.S.; Shin, M.H.; Hyun, D.S. Speed sensorless stator flux-oriented control of induction motor in the field weakening region using Luenberger observer. IEEE Trans. Power Electron. 2005, 20, 864–869. [Google Scholar] [CrossRef]
- Yin, Z.; Li, G.; Zhang, Y.; Liu, J.; Sun, X.; Zhong, Y. A speed and flux observer of induction motor based on extended Kalman filter and Markov chain. IEEE Trans. Power Electron. 2016, 32, 7096–7117. [Google Scholar] [CrossRef]
- Cao, R.; Jiang, N.; Lu, M. Sensorless control of linear flux-switching permanent magnet motor based on extended Kalman filter. IEEE Trans. Ind. Electron. 2019, 67, 5971–5979. [Google Scholar] [CrossRef]
- Qiao, Z.; Shi, T.; Wang, Y.; Yan, Y.; Xia, C.; He, X. New sliding-mode observer for position sensorless control of permanent-magnet synchronous motor. IEEE Trans. Ind. Electron. 2012, 60, 710–719. [Google Scholar] [CrossRef]
- An, Q.; Zhang, J.; An, Q.; Liu, X.; Shamekov, A.; Bi, K. Frequency-adaptive complex-coefficient filter-based enhanced sliding mode observer for sensorless control of permanent magnet synchronous motor drives. IEEE Trans. Ind. Appl. 2019, 56, 335–343. [Google Scholar] [CrossRef]
- Yang, C.; Ma, T.; Che, Z.; Zhou, L. An adaptive-gain sliding mode observer for sensorless control of permanent magnet linear synchronous motors. IEEE Access 2017, 6, 3469–3478. [Google Scholar] [CrossRef]
- Cheng, H.; Sun, S.; Zhou, X.; Shao, D.; Mi, S.; Hu, Y. Sensorless DPCC of PMLSM using SOGI-PLL-based high-order SMO with cogging force feedforward compensation. IEEE Trans. Transp. Electrif. 2021, 8, 1094–1104. [Google Scholar] [CrossRef]
- Song, X.; Fang, J.; Han, B.; Zheng, S. Adaptive compensation method for high-speed surface PMSM sensorless drives of EMF-based position estimation error. IEEE Trans. Power Electron. 2015, 31, 1438–1449. [Google Scholar] [CrossRef]
- Wang, B.; Shao, Y.; Yu, Y.; Dong, Q. High-order terminal sliding-mode observer for chattering suppression and finite-time convergence in sensorless SPMSM drives. IEEE Trans. Power Electron. 2021, 36, 11910–11920. [Google Scholar] [CrossRef]
- Di Gennaro, S.; Domínguez, J.R.; Meza, M.A. Sensorless high order sliding mode control of induction motors with core loss. IEEE Trans. Ind. Electron. 2013, 61, 2678–2689. [Google Scholar] [CrossRef]
- Wang, G.; Zhan, H.; Zhang, G.; Gui, X.; Xu, D. Adaptive compensation method of position estimation harmonic error for EMF-based observer in sensorless IPMSM drives. IEEE Trans. Power Electron. 2013, 29, 3055–3064. [Google Scholar] [CrossRef]
- Ye, S.; Yao, X. An enhanced SMO-based permanent-magnet synchronous machine sensorless drive scheme with current measurement error compensation. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 9, 4407–4419. [Google Scholar] [CrossRef]
- Tejan, K.V.; Pindoriya, R.M.; Rajpurohit, B.S. Rotor position sensorless technique using high-speed sliding mode observer for pmsm drive. In Proceedings of the 2021 IEEE Industry Applications Society Annual Meeting (IAS), Vancouver, BC, Canada, 10–14 October 2021; pp. 1–8. [Google Scholar]
- Yuan, Q.; Yang, Y.; Wu, H.; Wu, H. Low speed sensorless control based on an improved sliding mode observation and the inverter nonlinearity compensation for SPMSM. IEEE Access 2020, 8, 61299–61310. [Google Scholar] [CrossRef]
- Chen, Z.; Zhang, X.; Zhang, H.; Liu, C.; Luo, G. Adaptive sliding mode observer-based sensorless control for SPMSM employing a dual-PLL. IEEE Trans. Transp. Electrif. 2021, 8, 1267–1277. [Google Scholar] [CrossRef]
- Liang, D.; Li, J.; Qu, R.; Kong, W. Adaptive second-order sliding-mode observer for PMSM sensorless control considering VSI nonlinearity. IEEE Trans. Power Electron. 2017, 33, 8994–9004. [Google Scholar] [CrossRef]
- Liang, D.; Li, J.; Qu, R. Sensorless control of permanent magnet synchronous machine based on second-order sliding-mode observer with online resistance estimation. IEEE Trans. Ind. Appl. 2017, 53, 3672–3682. [Google Scholar] [CrossRef]
- Kim, H.; Son, J.; Lee, J. A high-speed sliding-mode observer for the sensorless speed control of a PMSM. IEEE Trans. Ind. Electron. 2010, 58, 4069–4077. [Google Scholar]
- Ye, S.; Yao, X. A modified flux sliding-mode observer for the sensorless control of PMSMs with online stator resistance and inductance estimation. IEEE Trans. Power Electron. 2020, 35, 8652–8662. [Google Scholar] [CrossRef]
- Gong, C.; Hu, Y.; Gao, J.; Wang, Y.; Yan, L. An improved delay-suppressed sliding-mode observer for sensorless vector-controlled PMSM. IEEE Trans. Ind. Electron. 2019, 67, 5913–5923. [Google Scholar] [CrossRef]
- Liu, G.; Zhang, H.; Song, X. Position-estimation deviation-suppression technology of PMSM combining phase self-compensation SMO and feed-forward PLL. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 9, 335–344. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Value | Unit |
|---|---|---|
| Rated voltage | 220 | V |
| Rated speed | 1000 | rpm |
| Efficiency | 91.7% | / |
| Number of pole pairs | 4 | / |
| Stator winding resistance Rs | 2 | Ω |
| α-axis inductance Lα | 6.5 | mH |
| β-axis inductance Lβ | 6.5 | mH |
| Switching frequency | 10 | kHz |
| Sampling frequency | 10 | kHz |
| Dead-time | 0.6 | μs |
| Feedback coefficient σ | 0.06 | / |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, W.; Luo, B.; Yang, Y.; Niu, H.; Zhang, X.; Zhou, Y.; Zeng, C. An Adaptive-Gain Sliding Mode Observer with Precise Compensation for Sensorless Control of PMSM. Energies 2023, 16, 7968. https://doi.org/10.3390/en16247968
Liu W, Luo B, Yang Y, Niu H, Zhang X, Zhou Y, Zeng C. An Adaptive-Gain Sliding Mode Observer with Precise Compensation for Sensorless Control of PMSM. Energies. 2023; 16(24):7968. https://doi.org/10.3390/en16247968
Chicago/Turabian StyleLiu, Wenfei, Bo Luo, Yong Yang, Haoming Niu, Xujun Zhang, Yu Zhou, and Chengbi Zeng. 2023. "An Adaptive-Gain Sliding Mode Observer with Precise Compensation for Sensorless Control of PMSM" Energies 16, no. 24: 7968. https://doi.org/10.3390/en16247968