
A Comparison of Power Take-Off Architectures for Wave-Powered Reverse Osmosis Desalination of Seawater with Co-Production of Electricity
Abstract
:1. Introduction
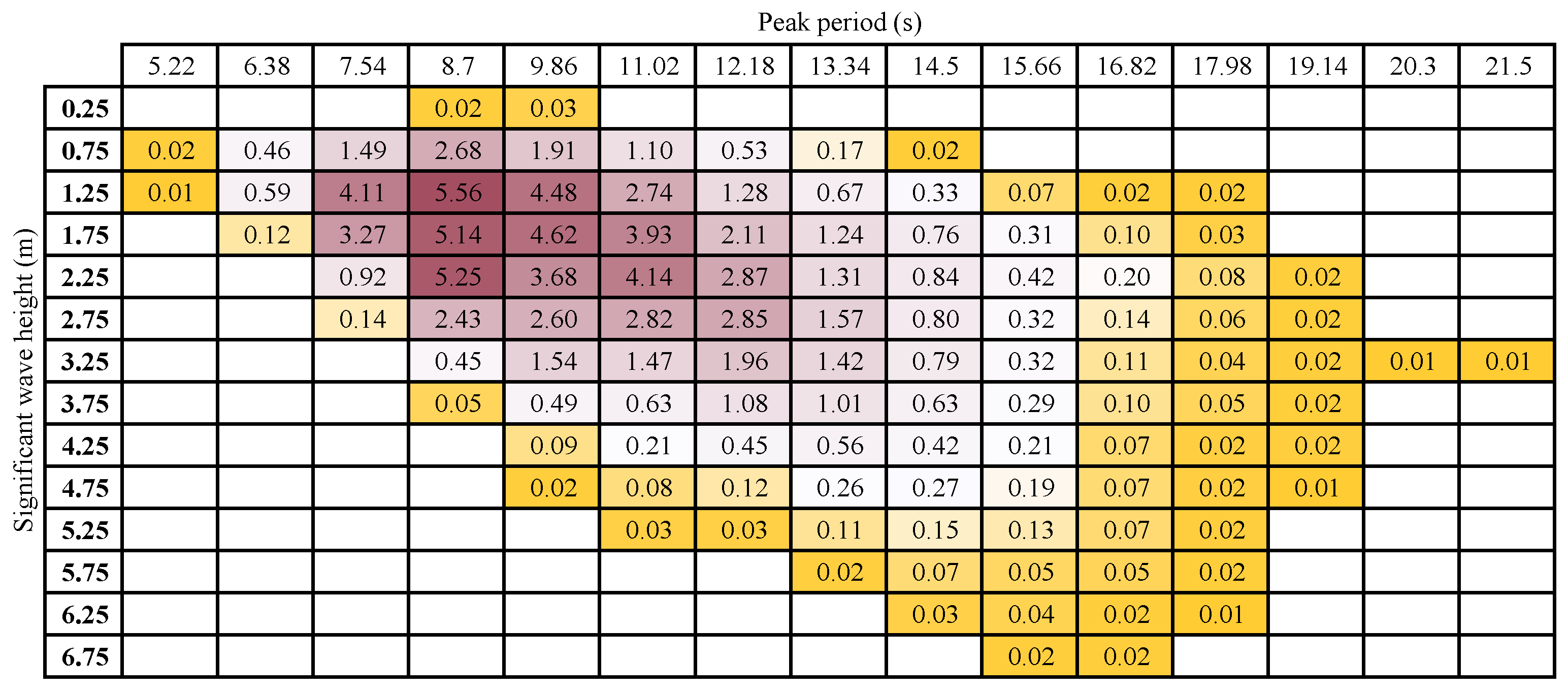
- Waves are fully developed and are described by the Pierson–Moskowitz spectrum [36].
- There is no variation in wave direction with respect to the WEC.
- The ERU maintains a constant recovery ratio of the RO process of 25%. This is achievable either through control (e.g., control of shaft speed) or design of the ERU, depending on its type.
- The solute concentration of the seawater is constant with an osmotic pressure of 2.275 MPa.
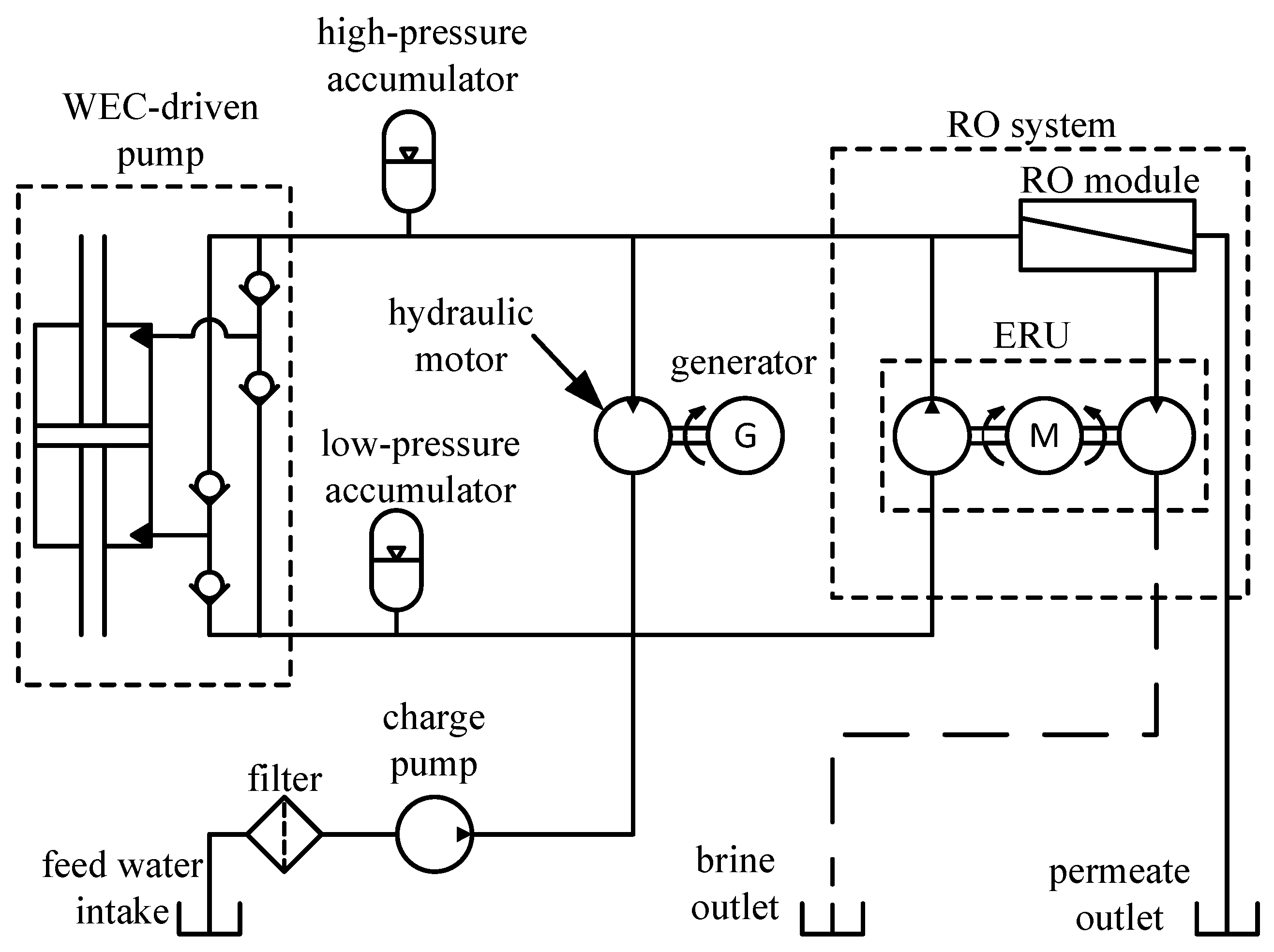
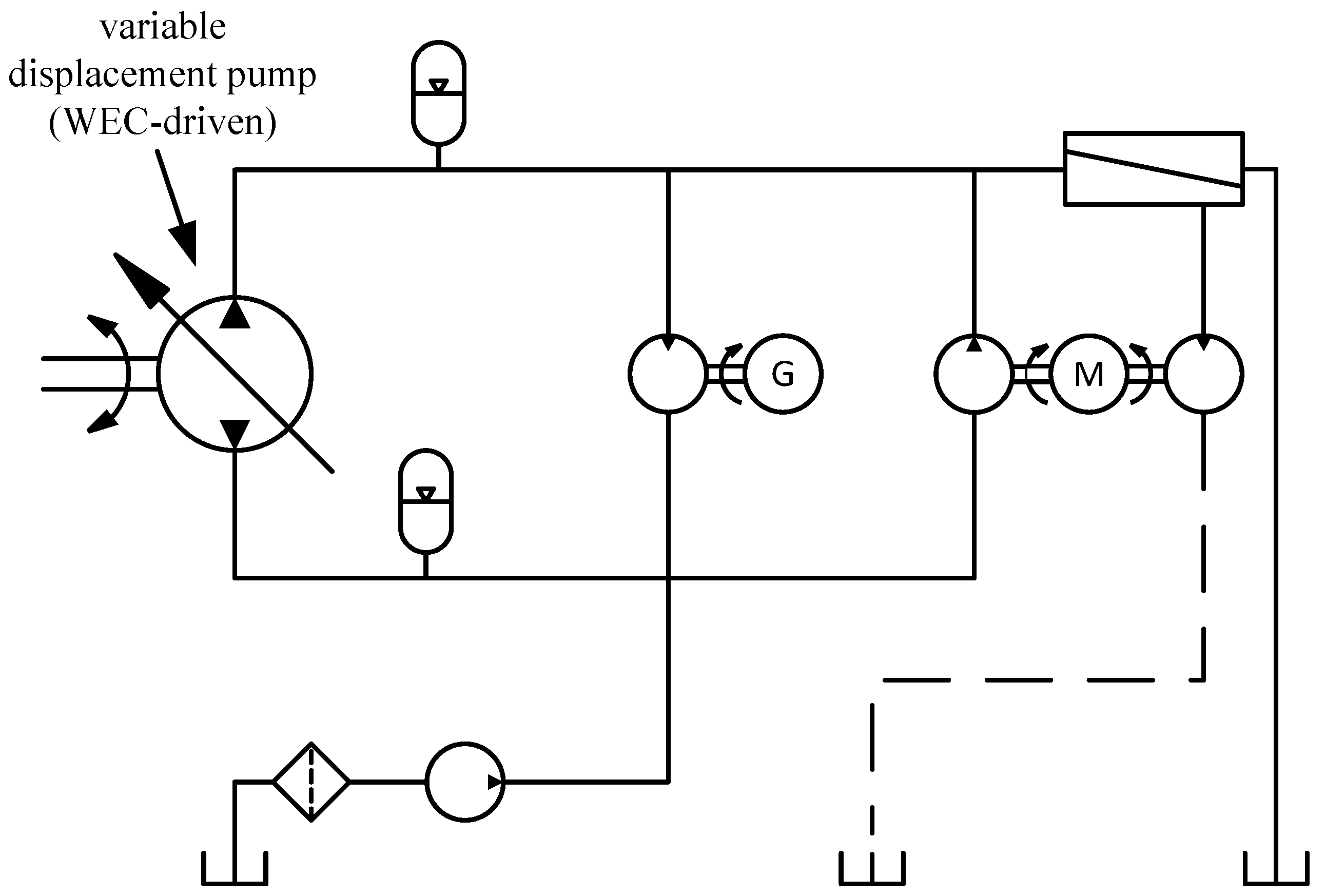
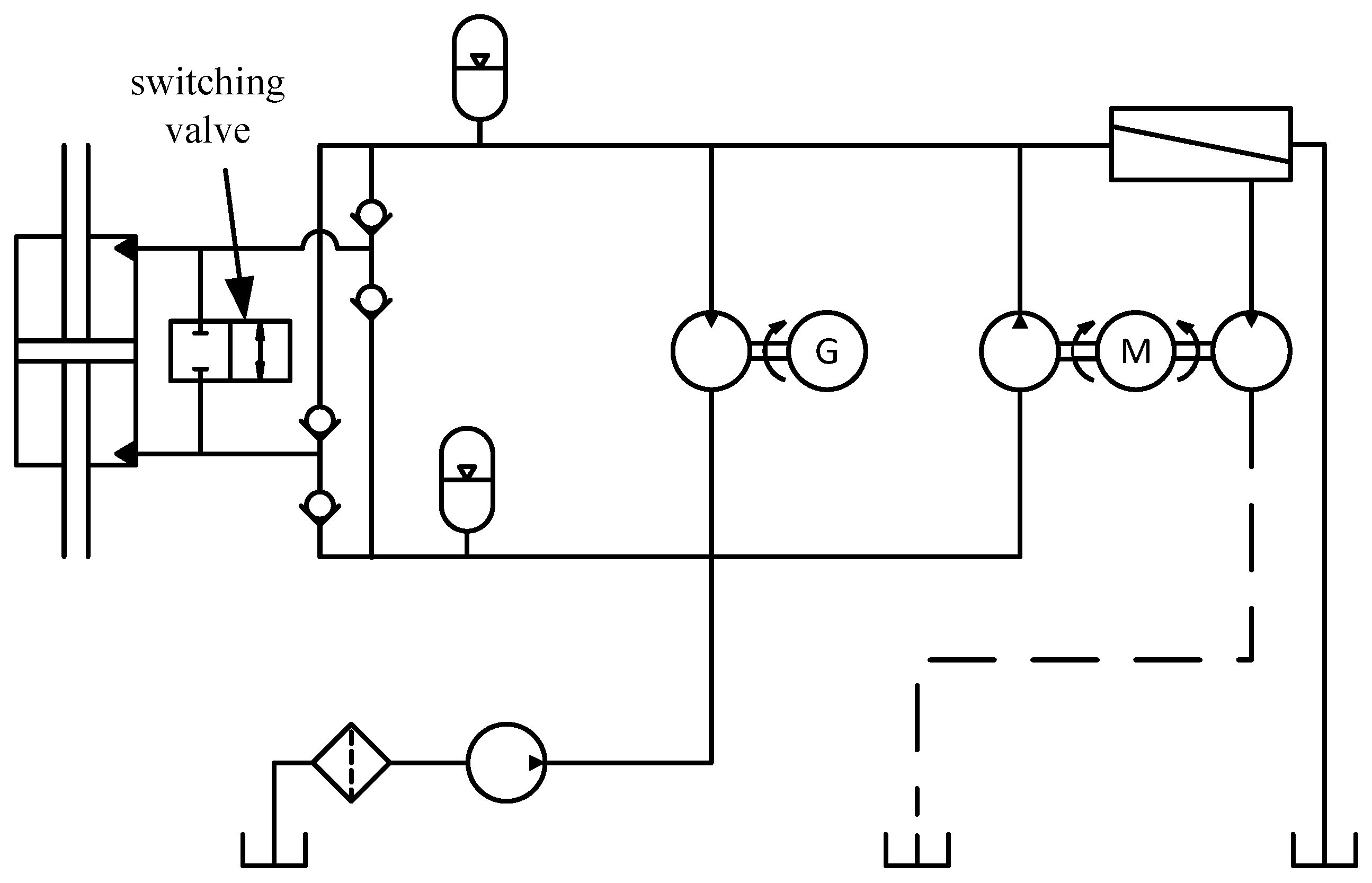
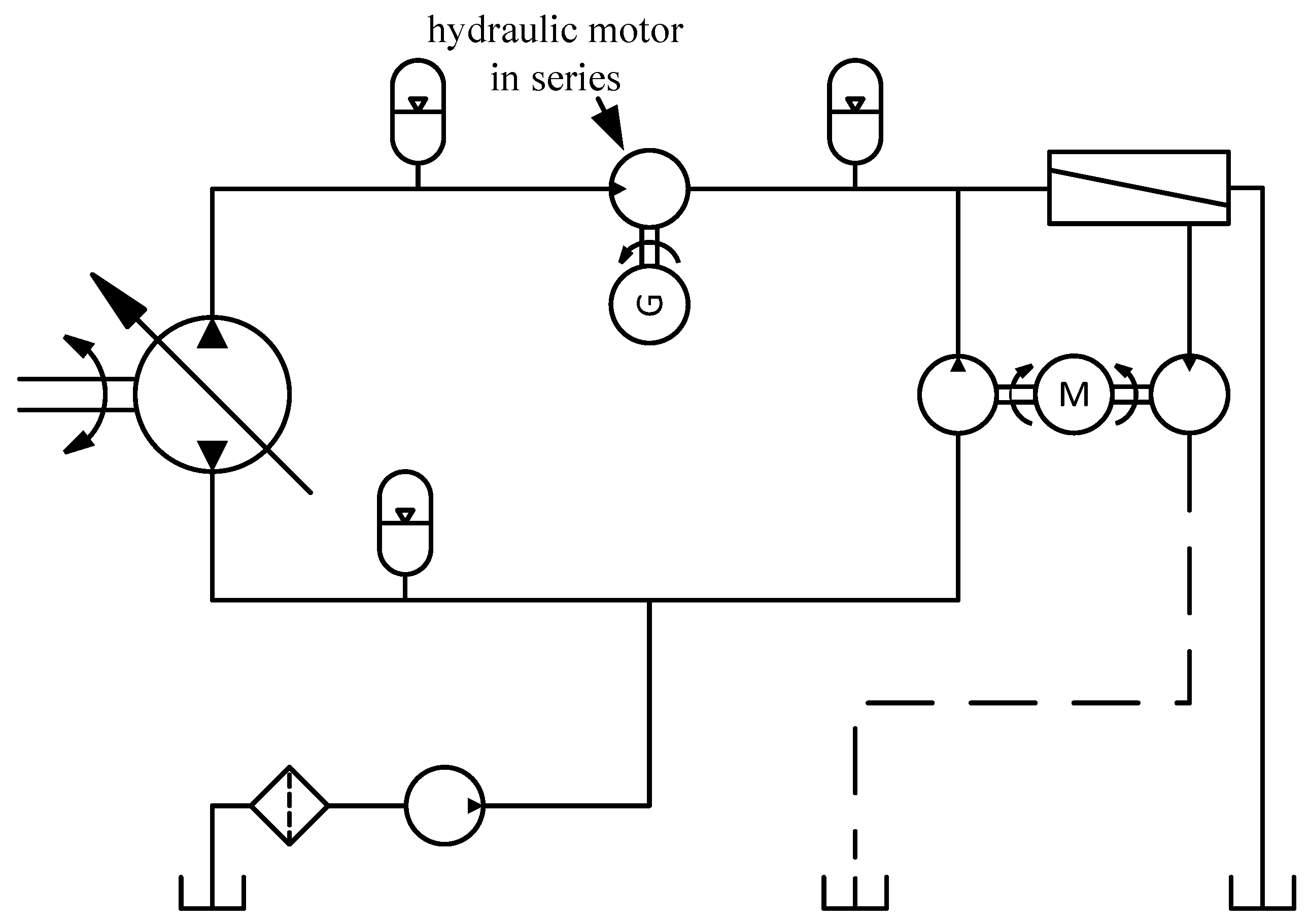
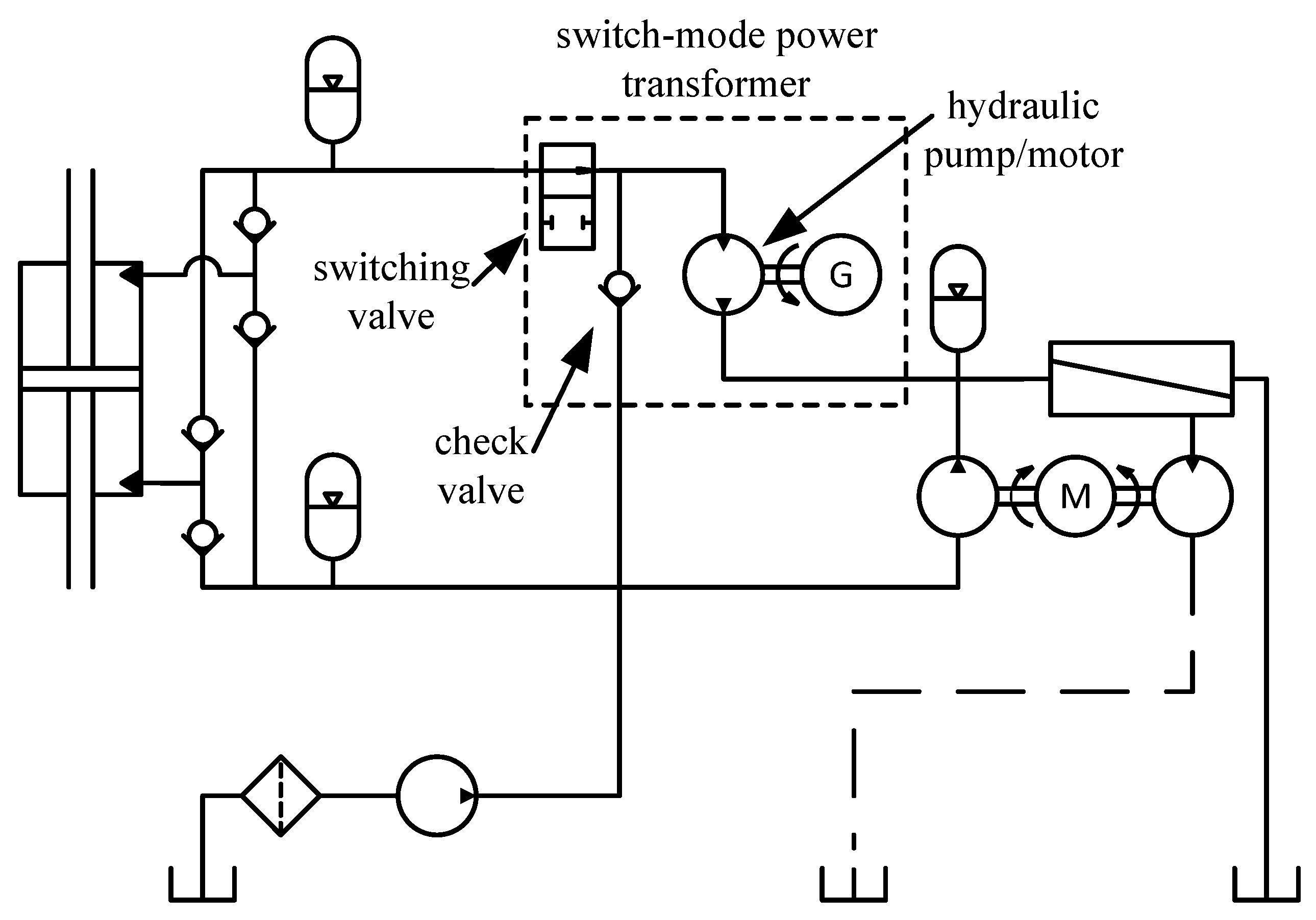
2. Proposed Power Take-Off Architectures
3. Design Performance of a System from Prior Work as a Point of Reference
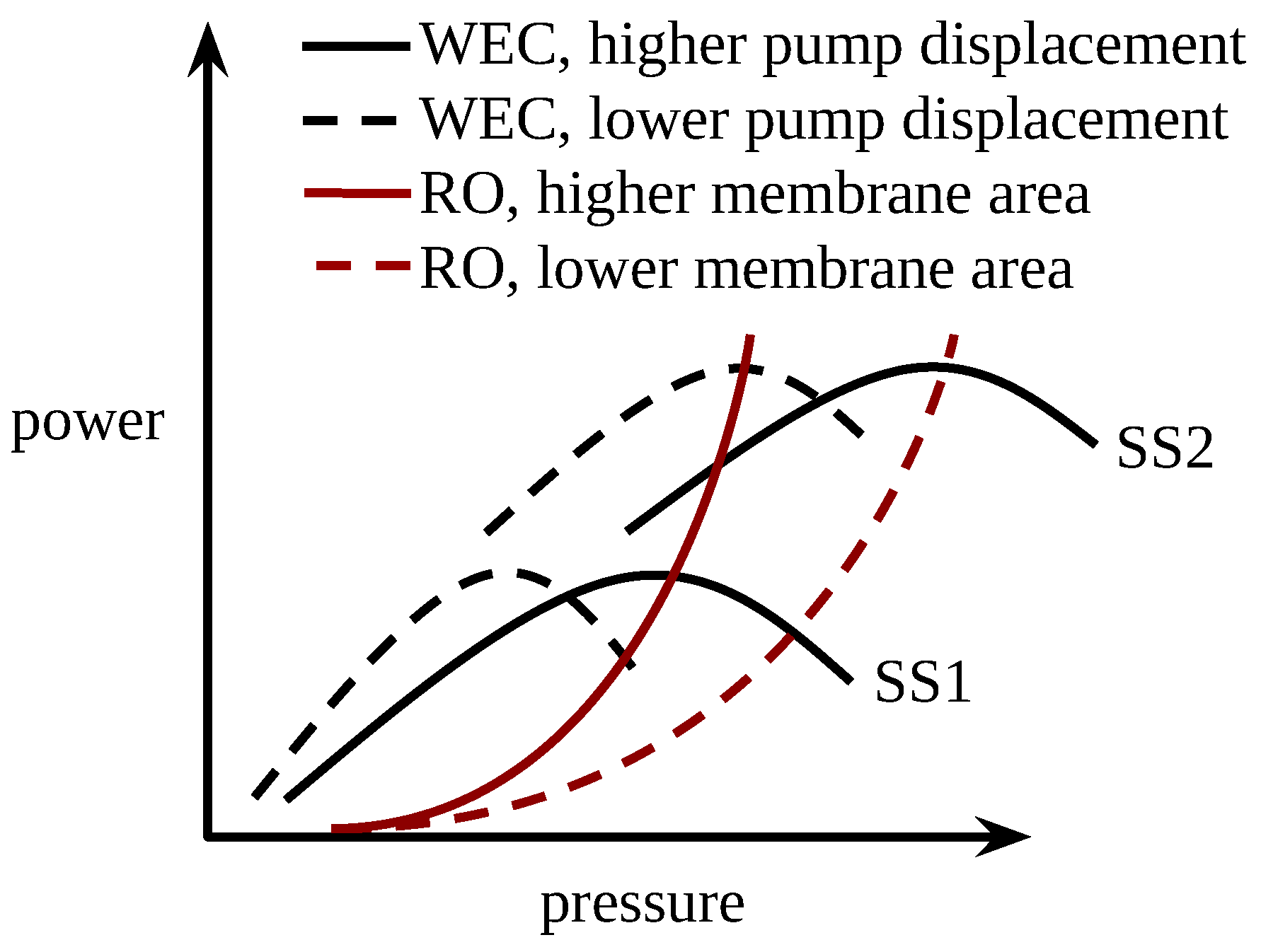
3.1. Pump Displacement
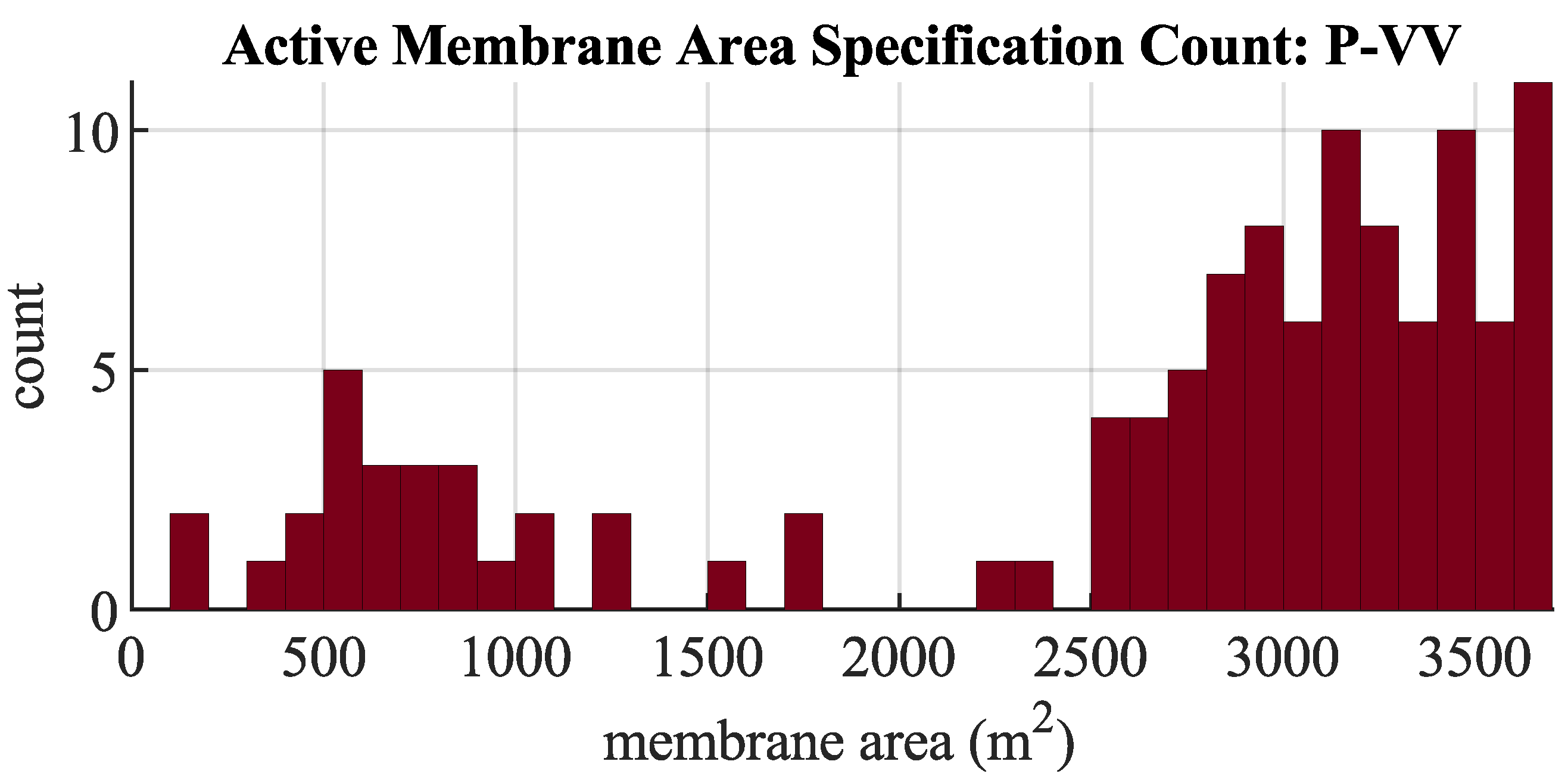
3.2. Reverse Osmosis Membrane Area
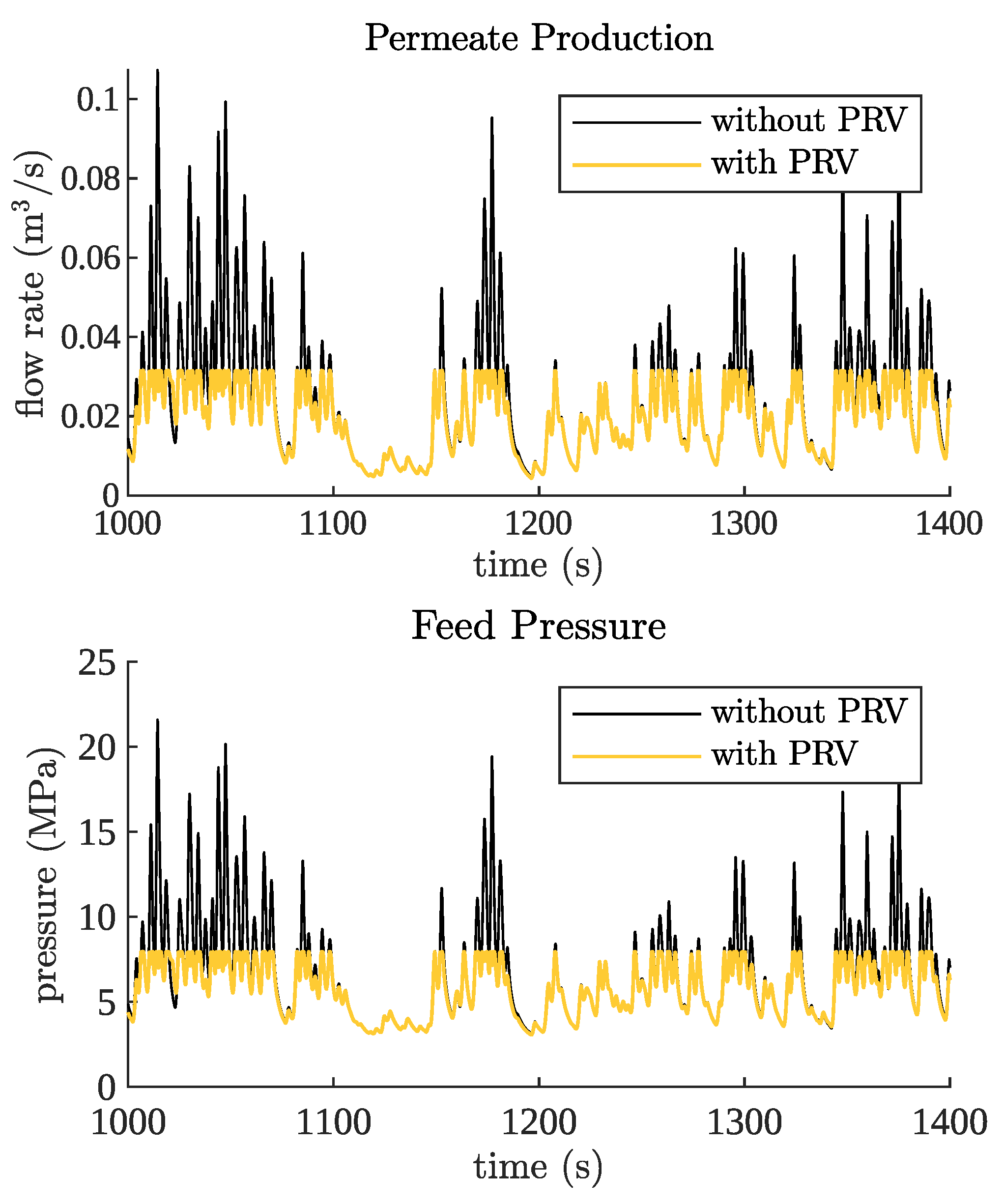
3.3. Modified Model with Pressure Relief Valve
4. Methods
4.1. Power Take-Off Models
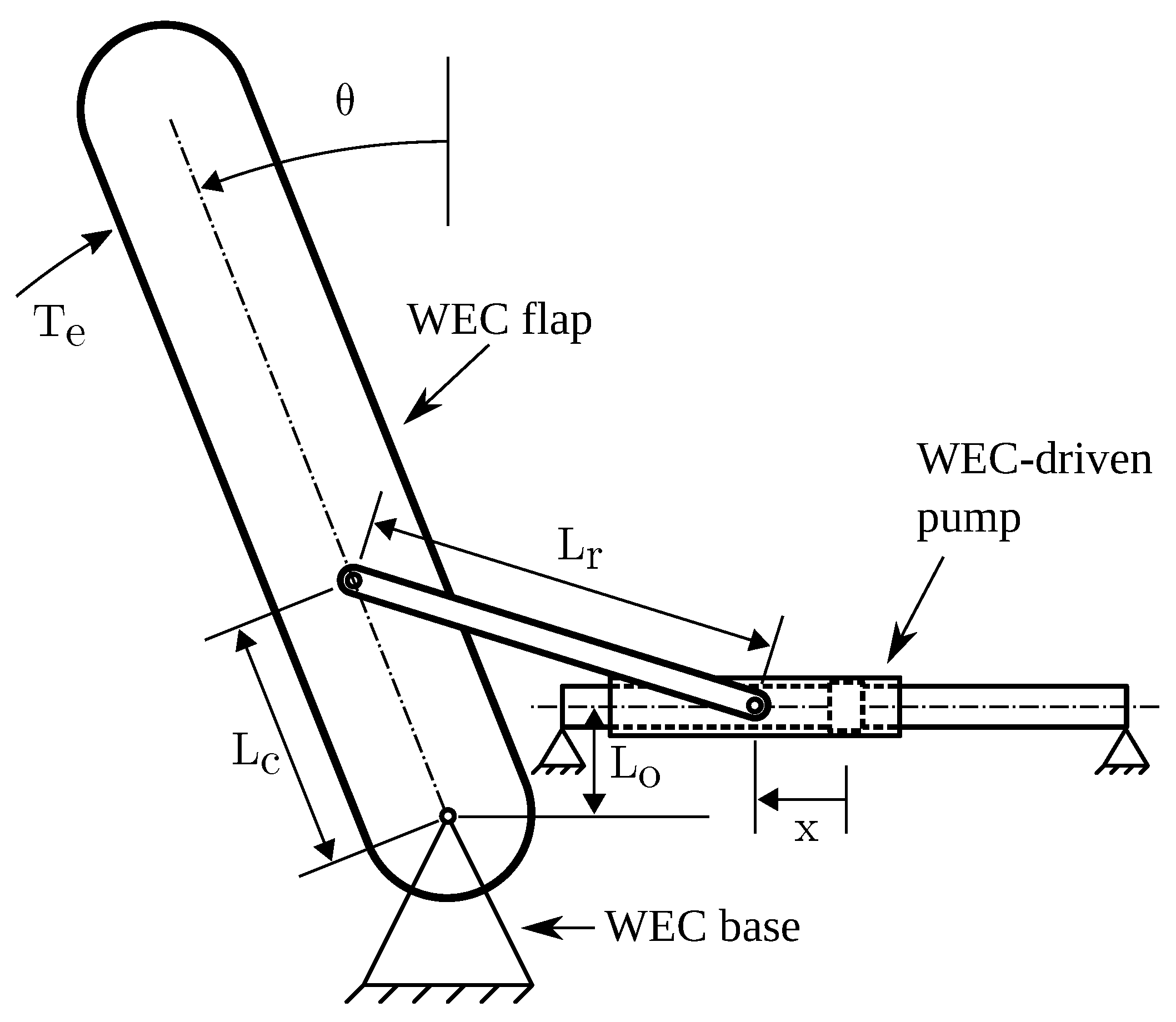
4.2. Wave Energy Converter Model
Model Validation
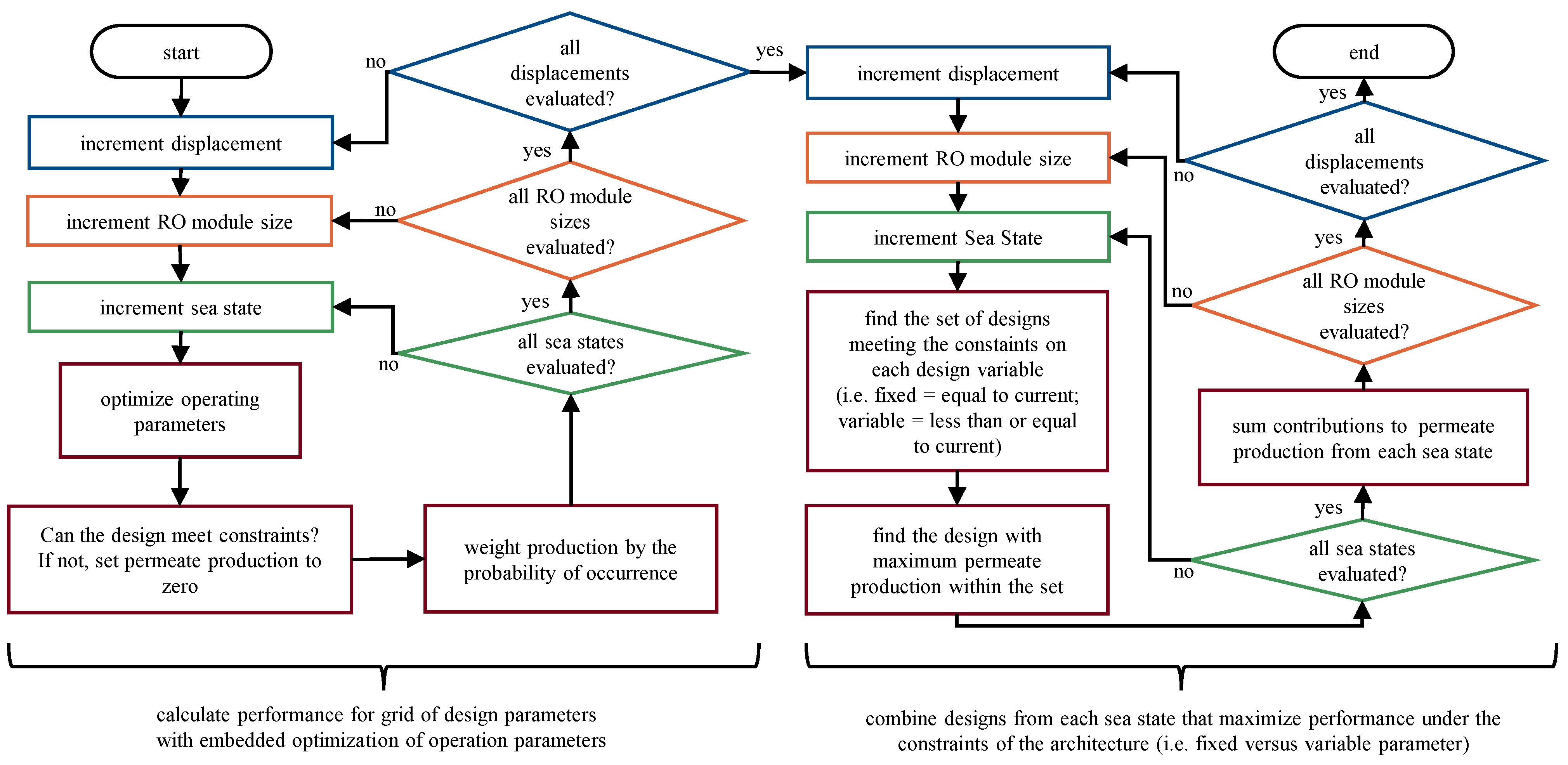
4.3. Design Study Methods
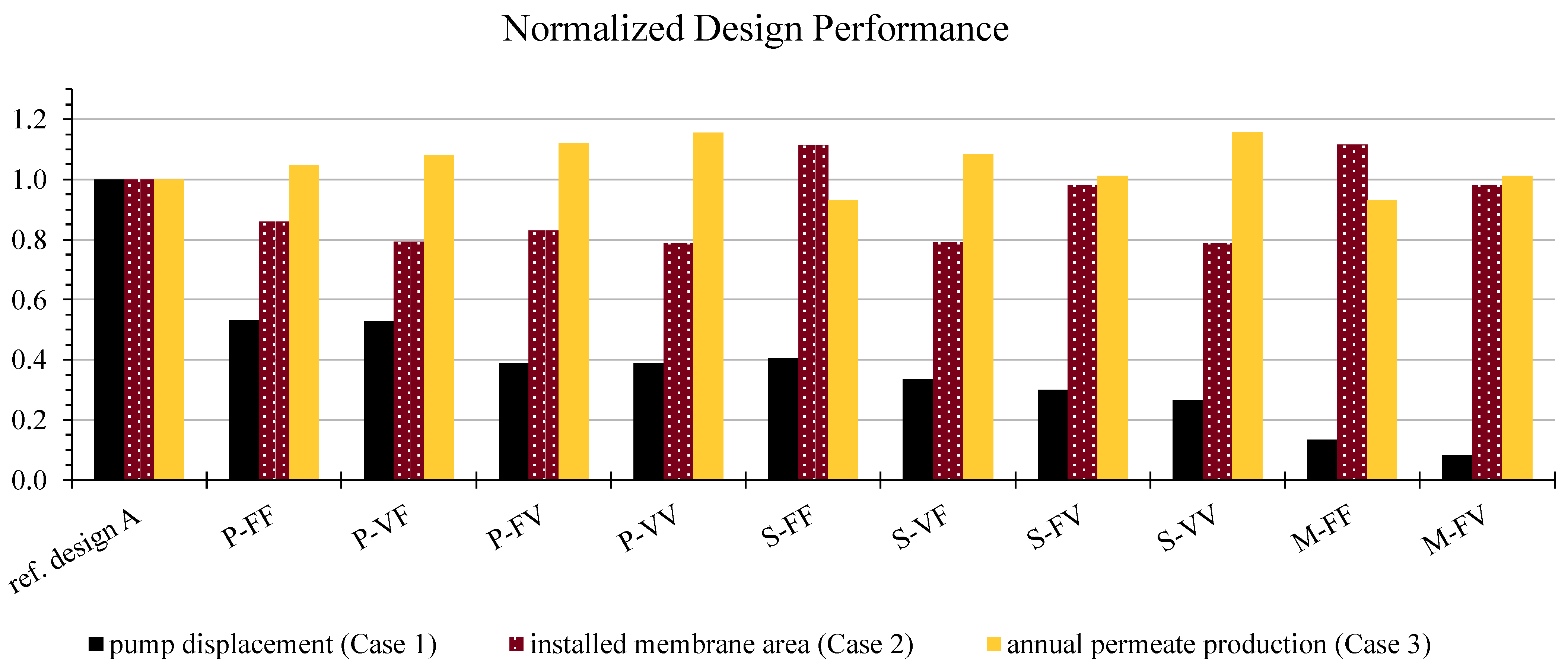
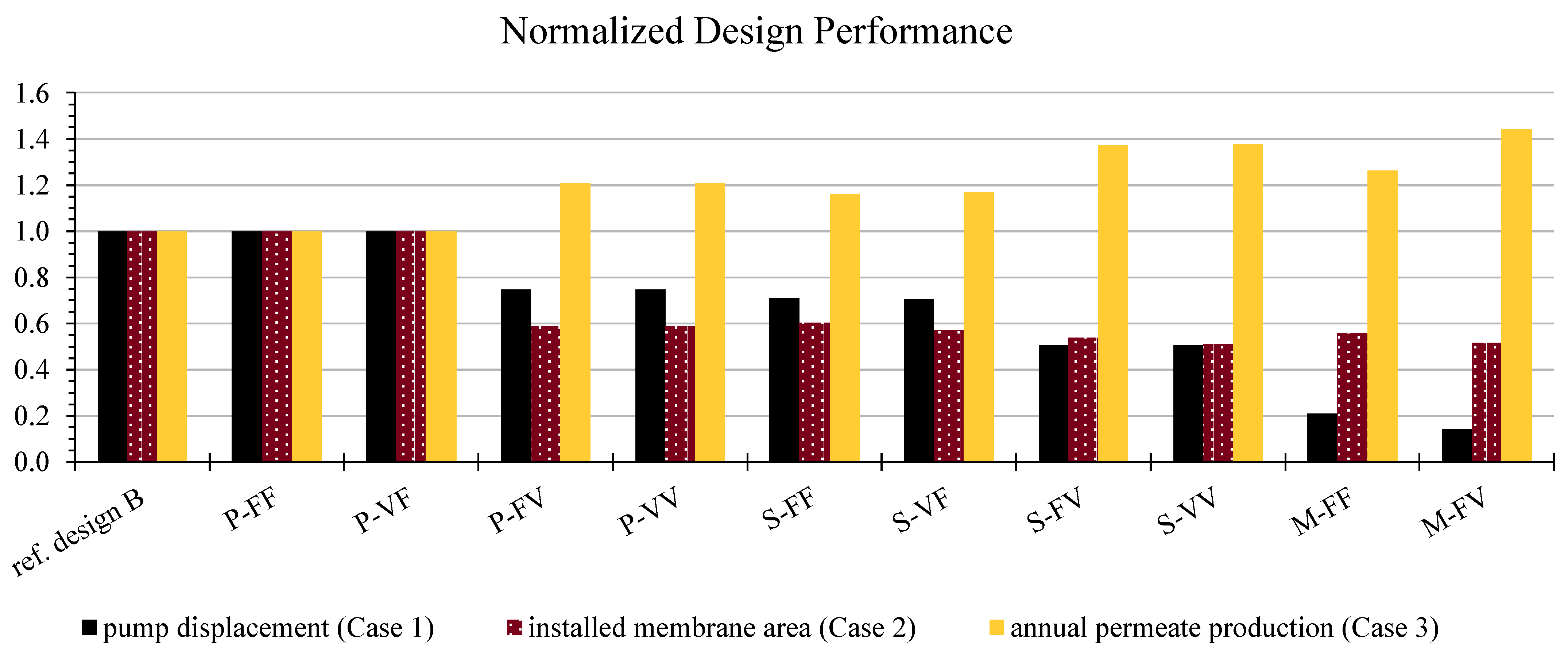
- Case 1—Determination of the lowest pump displacement that achieves the same permeate production as the reference design, while having an installed membrane area that matches the reference design.
- Case 2—Determination of the lowest installed membrane area that achieves the same permeate production as the reference design, while having a pump displacement that matches the reference design.
- Case 3—Determination of the permeate production with a pump displacement and installed membrane area that match the reference design.
5. Results and Discussion
5.1. Optimal Operating Parameters
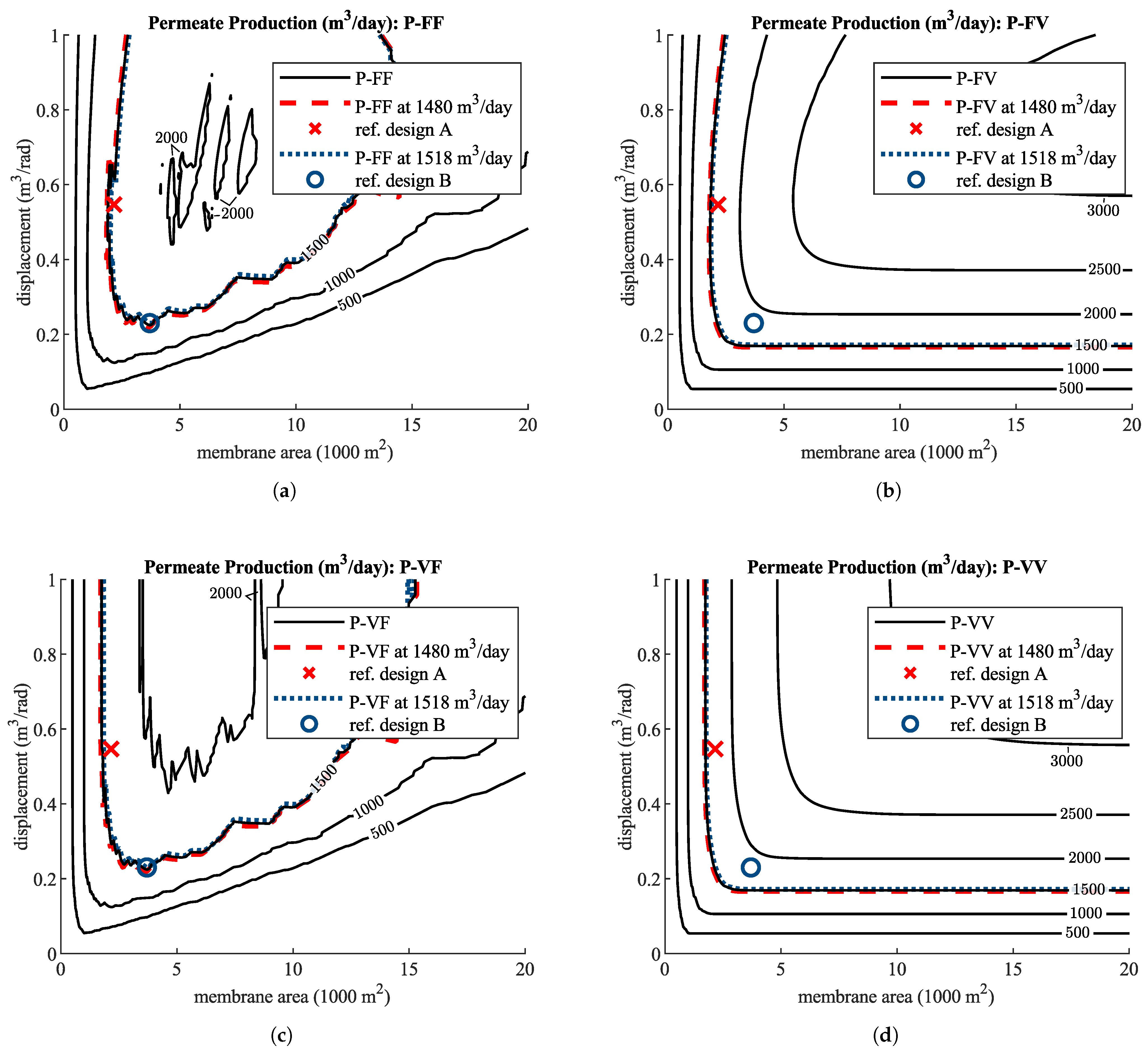
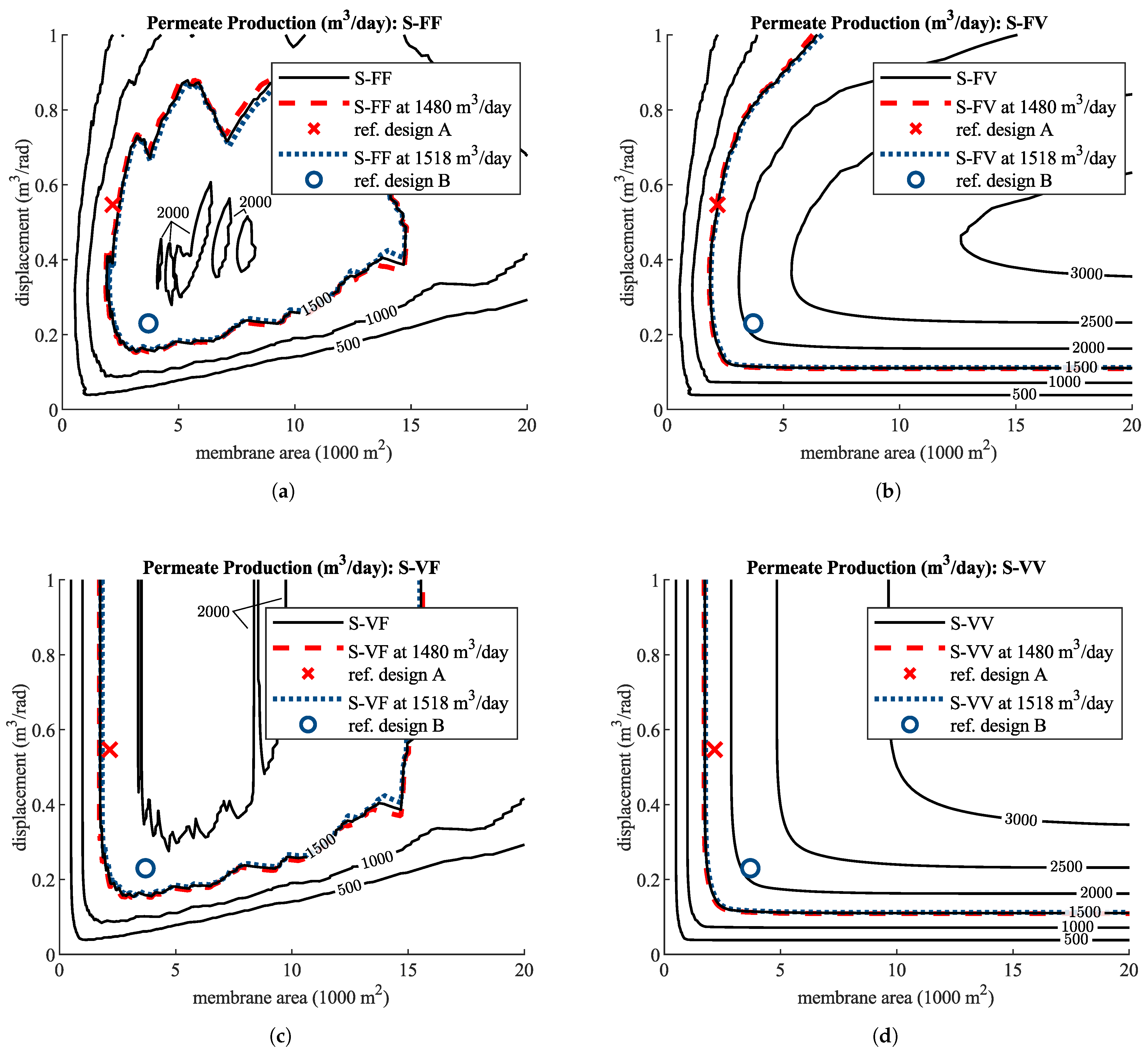
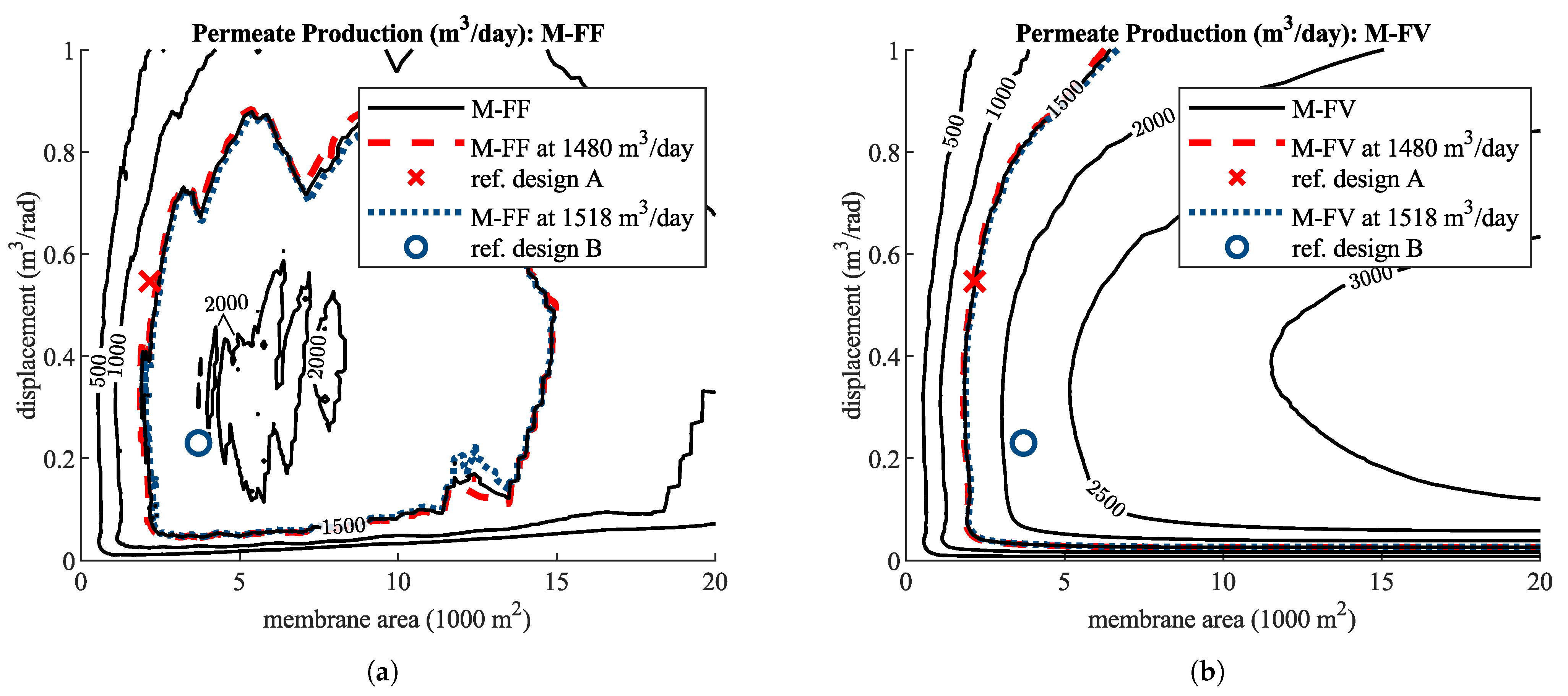
5.2. Objective Space
5.3. Comparison to Reference Designs
5.4. Discussion
6. Conclusions and Future Work
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| MDPI | Multidisciplinary Digital Publishing Institute |
| DOAJ | Directory of open access journals |
| WEC | wave energy converter |
| PTO | power take-off |
| RO | reverse osmosis |
| OWSC | oscillating wave surge converter |
| CA | California |
| PRV | pressure relief valve |
| DOE | U.S. Department of Energy |
| ORISE | Oak Ridge Institute for Science and Education |
| ORAU | Oak Ridge Associated Universities |
| SBIR | Small Business Innovation Research program |
References
- Davies, P. Wave-powered desalination: Resource assessment and review of technology. Desalination 2005, 186, 97–109. [Google Scholar] [CrossRef]
- Folley, M.; Suarez, B.P.; Whittaker, T. An autonomous wave-powered desalination system. Desalination 2008, 220, 412–421. [Google Scholar] [CrossRef]
- Resolute Marine Energy. Available online: http://www.resolutemarine.com/ (accessed on 15 April 2019).
- Mi, J.; Wu, X.; Capper, J.; Li, X.; Shalaby, A.; Chung, U.; Datla, R.; Hajj, M.; Zuo, L. Ocean Wave Powered Reverse Osmosis Desalination: Design, Modeling and Test Validation. IFAC-PapersOnLine 2022, 55, 782–787. [Google Scholar] [CrossRef]
- Mi, J.; Wu, X.; Capper, J.; Li, X.; Shalaby, A.; Wang, R.; Lin, S.; Hajj, M.; Zuo, L. Experimental investigation of a reverse osmosis desalination system directly powered by wave energy. Appl. Energy 2023, 343, 121194. [Google Scholar] [CrossRef]
- Schallenberg-Rodríguez, J.; Del Rio-Gamero, B.; Melian-Martel, N.; Alecio, T.L.; Herrera, J.G. Energy supply of a large size desalination plant using wave energy. Practical case: North of Gran Canaria. Appl. Energy 2020, 278, 115681. [Google Scholar] [CrossRef]
- Hwang, J.; Kiung, Y. Wave energy converters (WEC) for desalination applications. A potential application in Mediterranean Sea. In Proceedings of the OCEANS 2017-Anchorage, Anchorage, AK, USA, 18–21 September 2017; pp. 1–6. [Google Scholar]
- Franzitta, V.; Curto, D.; Milone, D.; Viola, A. The desalination process driven by wave energy: A challenge for the future. Energies 2016, 9, 1032. [Google Scholar] [CrossRef]
- Cabrera, P.; Folley, M.; Carta, J.A. Design and performance simulation comparison of a wave energy-powered and wind-powered modular desalination system. Desalination 2021, 514, 115173. [Google Scholar] [CrossRef]
- Del Río-Gamero, B.; Alecio, T.L.; Schallenberg-Rodríguez, J. Performance indicators for coupling desalination plants with wave energy. Desalination 2022, 525, 115479. [Google Scholar] [CrossRef]
- Burgaç, A.; Yavuz, H. Renewable energy based freshwater production utilizing reverse osmosis desalination. In Energy Sources, Part A: Recovery, Utilization, and Environmental Effects; Taylor and Francis: Abingdon, UK, 2021; pp. 1–15. [Google Scholar]
- Brodersen, K.M.; Bywater, E.A.; Lanter, A.M.; Schennum, H.H.; Furia, K.N.; Sheth, M.K.; Kiefer, N.S.; Cafferty, B.K.; Rao, A.K.; Garcia, J.M.; et al. Direct-drive ocean wave-powered batch reverse osmosis. Desalination 2022, 523, 115393. [Google Scholar] [CrossRef]
- Yu, Y.H.; Jenne, D. Analysis of a wave-powered, reverse-osmosis system and its economic availability in the United States. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, Trondheim, Norway, 25–30 June 2017; American Society of Mechanical Engineers: New York, NY, USA, 2017; Volume 57786, p. V010T09A032. [Google Scholar]
- Dupont. Filmtec Reverse Osmosis Membranes Technical Manual; Dupont Water Solutions: Edina, MN, USA, 2023; Form No. 45-D01504-en, Rev. 16. [Google Scholar]
- Hicks, D.C.; Mitcheson, G.R.; Pleass, C.M.; Salevan, J.F. Delbouy: Ocean wave-powered seawater reverse osmosis desalination systems. Desalination 1989, 73, 81–94. [Google Scholar] [CrossRef]
- Leijon, J.; Boström, C. Freshwater production from the motion of ocean waves—A review. Desalination 2018, 435, 161–171. [Google Scholar] [CrossRef]
- Yu, Y.H.; Jenne, D. Numerical modeling and dynamic analysis of a wave-powered reverse-osmosis system. J. Mar. Sci. Eng. 2018, 6, 132. [Google Scholar] [CrossRef]
- Suchithra, R.; Das, T.K.; Rajagopalan, K.; Chaudhuri, A.; Ulm, N.; Prabu, M.; Samad, A.; Cross, P. Numerical modelling and design of a small-scale wave-powered desalination system. Ocean. Eng. 2022, 256, 111419. [Google Scholar] [CrossRef]
- CETO 5—Perth (WA). Available online: https://www.carnegiece.com/portfolio/ceto-5-perth-wa/ (accessed on 22 December 2022).
- Henderson, R. Design, simulation, and testing of a novel hydraulic power take-off system for the Pelamis wave energy converter. Renew. Energy 2006, 31, 271–283. [Google Scholar] [CrossRef]
- O’Boyle, L.; Doherty, K.; van’t Hoff, J.; Skelton, J. The value of full scale prototype data-testing oyster 800 at emec, orkney. In Proceedings of the 11th European Wave and Tidal Energy Conference (EWTEC), Nantes, France, 6–11 September 2015. [Google Scholar]
- Cargo, C.; Hillis, A.; Plummer, A. Optimisation and control of a hydraulic power take-off unit for a wave energy converter in irregular waves. Proc. Inst. Mech. Eng. Part J. Power Energy 2014, 228, 462–479. [Google Scholar] [CrossRef]
- Hansen, R.H.; Kramer, M.M.; Vidal, E. Discrete displacement hydraulic power take-off system for the wavestar wave energy converter. Energies 2013, 6, 4001–4044. [Google Scholar] [CrossRef]
- Penalba, M.; Ringwood, J.V. A review of wave-to-wire models for wave energy converters. Energies 2016, 9, 506. [Google Scholar] [CrossRef]
- Plummer, A.; Schlotter, M. Investigating the performance of a hydraulic power take-off. In Proceedings of the Eight European Wave and Tidal Energy Conference, Uppsala, Sweden, 7–11 September 2009; pp. 729–735. [Google Scholar]
- Thomson, A.R.; Morris, R. Desalination System and Method. U.S. Patent Application 12/781,456, 13 January 2011. [Google Scholar]
- Stover, R.L. Seawater reverse osmosis with isobaric energy recovery devices. Desalination 2007, 203, 168–175. [Google Scholar] [CrossRef]
- Danfoss. Energy Recovery Devices for Small to Medium SWRO Applications. Available online: https://www.danfoss.com/en/products/hpp/energy-recovery-devices/energy-recovery-device-for-small-to-medium-swro-applications/#tab-overview (accessed on 16 October 2023).
- Thomson, M.; Miranda, M.S.; Infield, D. A small-scale seawater reverse-osmosis system with excellent energy efficiency over a wide operating range. Desalination 2002, 153, 229–236. [Google Scholar] [CrossRef]
- Paulsen, K.; Hensel, F. Introduction of a new Energy Recovery System—Optimized for the combination with renewable energy. Desalination 2005, 184, 211–215. [Google Scholar] [CrossRef]
- Folley, M.; Whittaker, T. The cost of water from an autonomous wave-powered desalination plant. Renew. Energy 2009, 34, 75–81. [Google Scholar] [CrossRef]
- Ylänen, M.M.; Lampinen, M.J. Determining optimal operating pressure for AaltoRO—A novel wave powered desalination system. Renew. Energy 2014, 69, 386–392. [Google Scholar] [CrossRef]
- Oyster 1. Available online: http://www.aquamarinepower.com/technologies/oyster-1/ (accessed on 29 November 2010).
- Van’t Hoff, J. Hydrodynamic Modelling of the Oscillating Wave Surge Converter. Ph.D. Thesis, Queen’s University Belfast, Belfast, UK, 2009. [Google Scholar]
- Dallman, A.R.; Neary, V.S. Characterization of US Wave Energy Converter (WEC) Test Sites: A Catalogue of Met-Ocean Data; Technical Report; Sandia National Lab (SNL-NM): Albuquerque, NM, USA, 2014. [Google Scholar]
- Falnes, J.; Kurniawan, A. Ocean Waves and Oscillating Systems: Linear Interactions Including Wave-Energy Extraction; Cambridge University Press: Cambridge, UK, 2020; Volume 8. [Google Scholar]
- Folley, M.; Whittaker, T.; Van’t Hoff, J. The design of small seabed-mounted bottom-hinged wave energy converters. In Proceedings of the 7th European Wave and Tidal Energy Conference, Porto, Portugal, 11–13 September 2007; Volume 455, p. 312. [Google Scholar]
- Fulbright, N.J.; Boyce-Erickson, G.C.; Chase, T.R.; Li, P.Y.; Van de Ven, J.D. Automated design and analysis of a variable displacement linkage motor. In Fluid Power Systems Technology, Proceedings of the ASME/BATH 2019 Symposium on Fluid Power and Motion Control, Longboat Key, FL, USA, 7–9 October 2019; American Society of Mechanical Engineers: New York, NY, USA, 2019; Volume 59339, p. V001T01A036. [Google Scholar]
- Larson, J.; Pozo-Palacios, J.; Boyce-Erickson, G.; Fulbright, N.; Dai, J.; Voth, J.; Gajghate, N.; Saikia, J.; Michael, P.; Chase, T.; et al. Experimental validation of subsystem models for a novel variable displacement hydraulic motor. In Proceedings of the Fluid Power Systems Technology, Virtual, 19–21 October 2021; American Society of Mechanical Engineers: New York, NY, USA, 2021; Volume 85239, p. V001T01A014. [Google Scholar]
- Simmons, J.W.; Van de Ven, J.D. Switch-mode power transformer in a wave-powered, reverse osmosis desalination plant. In Fluid Power Systems Technology, Proceedings of the ASME/BATH 2019 Symposium on Fluid Power and Motion Control, Longboat Key, FL, USA, 7–9 October 2019; American Society of Mechanical Engineers: New York, NY, USA, 2019; Volume 59339, p. V001T01A020. [Google Scholar]
- WAVE Water Treatment Design Software. Available online: https://www.dupont.com/water/resources/design-software.html (accessed on 21 August 2023).
- Cummins, W. The Impulse Response Function and Ship Motions; Technical Report; David Taylor Model Basin: Washington, DC, USA, 1962. [Google Scholar]
- Perez, T.; Fossen, T.I. A Matlab Toolbox for Parametric Identification of Radiation-Force Models of Ships and Offshore Structures. Model. Identif. Control 2009, 30, 1–15. [Google Scholar] [CrossRef]
- Babarit, A.; Delhommeau, G. Theoretical and numerical aspects of the open source BEM solver NEMOH. In Proceedings of the 11th European Wave and Tidal Energy Conference (EWTEC2015), Nantes, France, 6–11 September 2015. [Google Scholar]
- Ruehl, K.; Michelen, C.; Kanner, S.; Lawson, M.; Yu, Y.H. Preliminary verification and validation of WEC-Sim, an open-source wave energy converter design tool. In International Conference on Offshore Mechanics and Arctic Engineering, Proceedings of the ASME 2014 33rd International Conference on Ocean, Offshore and Arctic Engineering, San Francisco, CA, USA, 8–13 June 2014; American Society of Mechanical Engineers: New York, NY, USA, 2014; Volume 45547, p. V09BT09A040. [Google Scholar]
- Simmons, J.W.; Van de Ven, J.D. Limits on the Range and Rate of Change in Power Take-Off Load in Ocean Wave Energy Conversion: A Study Using Model Predictive Control. Energies 2023, 16, 5909. [Google Scholar] [CrossRef]
- Linjama, M. Digital fluid power: State of the art. In Proceedings of the Proceedings of The Twelfth Scandinavian International Conference on Fluid Power, Tampere, Finland, 18–20 May 2011. [Google Scholar]
- The Water Hydraulics Company. Motors. Available online: https://www.waterhydraulics.co.uk/motors/ (accessed on 16 October 2023).


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Units |
|---|---|---|
| Crank length, | 3 | m |
| Rod length, | 5 | m |
| Offset length, | 1.3 | m |
| Piston area, | 0.18 | m |
| Parameter | Value | Units |
|---|---|---|
| Permeate flux coefficient, | 2.57 × 10 | mNs |
| Osmotic pressure, | 2.275 | MPa |
| Recovery ratio, Y | 0.25 | - |
| Charge pressure, | 0.3 | MPa |
| WEC and WEC-driven pump efficiency, combined, | 0.9 | - |
| Hydraulic motor/pump efficiency, | 0.9 | - |
| Electric generator efficiency, | 0.9 | - |
| Charge pump efficiency, | 0.7 | - |
| Electric motor efficiency, | 0.9 | - |
| Parameter | Value | Units |
|---|---|---|
| WEC design | Oyster 1 | - |
| WEC type | oscillating wave | - |
| surge converter | ||
| Mass | 127,000 | kg |
| Moment of inertia | 1,850,000 | kg m |
| Length of flap from hinge | 11 | m |
| Center of mass from hinge | 5 | m |
| Width | 18 | m |
| Thickness | 2 | m |
| Hinge location above sea bed | 2 | m |
| Mean water depth | 10.9 | m |
| Parameter | Value | Units |
|---|---|---|
| Start-up duration | 250 | s |
| Simulation duration (after start-up) | 2000 | s |
| Solver | fixed-step Euler method | - |
| Time step | 0.01 | s |
| Number of wave frequency components | 100 | - |
| Random number generator seed | 3 | - |
| (MATLAB function rng()) |
| Parameter | Max. WEC-Driven Pump Displacement (m3/rad) | Total Installed RO Membrane Area (m2) | Annual Average Permeate Production (m3) | Source Description |
|---|---|---|---|---|
| A | 0.54 | 2162 | 1476 | Design from [13] re-evaluated in Section 3 |
| B | 0.23 | 3700 | 1518 | Selected design with the P-FF architecture |
| Sea Condition | Operating Parameters | Permeate Production (m3/day) | Power (kW) | ||||
|---|---|---|---|---|---|---|---|
| Significant Wave Height (m) | Peak Period (s) | RO Feed Pressure (Mpa) | Unweighted | Weighted | Captured by WEC | Consumed by Charge Pump | Produced by Generator |
| 0.75 | 9.9 | - | 0 | 0 | - | - | - |
| 0.75 | 12.2 | - | 0 | 0 | - | - | - |
| 1.25 | 5.2 | - | 0 | 0 | - | - | - |
| 1.75 | 14.5 | 5.1 | 2283 | 17.35 | 208.5 | 50.3 | 50.3 |
| 2.25 | 8.7 | - | 0 | 0 | - | - | - |
| 2.25 | 19.1 | 5.4 | 2539 | 0.508 | 242.2 | 56.0 | 56.0 |
| 3.25 | 13.3 | 7.4 | 4224 | 59.98 | 514.3 | 93.1 | 93.1 |
| 3.25 | 14.5 | 7.4 | 4199 | 33.17 | 509.7 | 92.6 | 92.6 |
| 4.25 | 11 | 8.0 | 4704 | 9.88 | 610.4 | 103.7 | 105.4 |
| 4.75 | 16.8 | 8.0 | 4704 | 3.29 | 639.5 | 103.7 | 126.6 |
| Sea Condition | Operating Parameters | Permeate Production (m3/day) | Power (kW) | |||||
|---|---|---|---|---|---|---|---|---|
| Significant Wave Height (m) | Peak Period (s) | WEC-Driven Pump Displacement (m3/rad) | RO Feed Pressure (Mpa) | Unweighted | Weighted | Captured by WEC | Consumed by Charge Pump | Produced by Generator |
| 0.75 | 9.9 | - | - | 0 | 0 | - | - | - |
| 0.75 | 12.2 | - | - | 0 | 0 | - | - | - |
| 1.25 | 5.2 | - | - | 0 | 0 | - | - | - |
| 1.75 | 14.5 | 0.230 | 5.1 | 2283 | 17.35 | 208.5 | 50.3 | 50.3 |
| 2.25 | 8.7 | - | - | 0 | 0 | - | - | - |
| 2.25 | 19.1 | 0.230 | 5.4 | 2539 | 0.508 | 242.2 | 56.0 | 56.0 |
| 3.25 | 13.3 | 0.230 | 7.4 | 4224 | 59.98 | 514.3 | 93.1 | 93.1 |
| 3.25 | 14.5 | 0.230 | 7.4 | 4199 | 33.17 | 509.7 | 92.6 | 92.6 |
| 4.25 | 11 | 0.230 | 8.0 | 4704 | 9.88 | 610.4 | 103.7 | 105.4 |
| 4.75 | 16.8 | 0.216 | 8.0 | 4704 | 3.29 | 608.2 | 103.7 | 103.8 |
| Sea Condition | Operating Parameters | Permeate Production (m3/day) | Power (kW) | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Significant Wave Height (m) | Peak Period (s) | WEC-Driven Pump Displacement (m3/rad) | Active RO Membrane Area (m2) | RO Feed Pressure (Mpa) | Unweighted | Weighted | Captured by WEC | Consumed by Charge Pump | Produced by Generator |
| 0.75 | 9.9 | - | 629 | - | 248 | 4.73 | - | - | - |
| 0.75 | 12.2 | - | - | 337 | 1.79 | - | - | - | |
| 1.25 | 5.2 | - | 518 | - | 286 | 0.0286 | - | - | - |
| 1.75 | 14.5 | 0.172 | 3700 | 4.8 | 2045 | 15.54 | 179.2 | 45.1 | 45.1 |
| 2.25 | 8.7 | - | 888 | - | 969 | 50.85 | - | - | - |
| 2.25 | 19.1 | 0.172 | 3552 | 5.0 | 2172 | 0.434 | 197.7 | 47.9 | 47.9 |
| 3.25 | 13.3 | 0.172 | 2886 | 7.6 | 3438 | 48.83 | 428.6 | 75.8 | 75.8 |
| 3.25 | 14.5 | 0.172 | 2738 | 7.9 | 3405 | 26.90 | 434.8 | 75.1 | 75.1 |
| 4.25 | 11 | 0.172 | 2997 | 8.0 | 3797 | 7.97 | 489.9 | 83.7 | 83.7 |
| 4.75 | 16.8 | 0.172 | 3071 | 8.0 | 3878 | 2.71 | 499.3 | 85.5 | 85.5 |
| Sea Condition | Operating Parameters | Permeate Production (m3/day) | Power (kW) | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Significant Wave Height (m) | Peak Period (s) | WEC-Driven Pump Displacement (m3/rad) | Active RO Membrane Area (m2) | RO Feed Pressure (Mpa) | Unweighted | Weighted | Captured by WEC | Consumed by Charge Pump | Produced by Generator |
| 0.75 | 9.9 | 0.117 | 666 | 6.4 | 260 | 4.97 | 20.4 | 5.7 | 5.7 |
| 0.75 | 12.2 | 0.117 | 888 | 6.4 | 343 | 1.82 | 26.8 | 7.6 | 7.6 |
| 1.25 | 5.2 | 0.117 | 777 | 6.4 | 303 | 0.0303 | 23.7 | 6.7 | 6.7 |
| 1.75 | 14.5 | 0.117 | 3700 | 7.2 | 2078 | 15.79 | 183.2 | 45.8 | 45.8 |
| 2.25 | 8.7 | 0.117 | 2516 | 6.4 | 972 | 51.01 | 75.8 | 21.4 | 21.4 |
| 2.25 | 19.1 | 0.117 | 3700 | 7.3 | 2202 | 0.440 | 198.4 | 48.5 | 48.5 |
| 3.25 | 13.3 | 0.117 | 3700 | 8.6 | 3248 | 46.12 | 345.9 | 71.6 | 71.6 |
| 3.25 | 14.5 | 0.117 | 3700 | 8.5 | 3210 | 25.36 | 339.9 | 70.8 | 70.8 |
| 4.25 | 11 | 0.117 | 3700 | 8.9 | 3519 | 7.39 | 389.6 | 77.6 | 77.6 |
| 4.75 | 16.8 | 0.117 | 3700 | 8.9 | 3539 | 2.48 | 393.0 | 78.0 | 78.0 |
| Sea Condition | Operating Parameters | Permeate Production (m3/day) | Power (kW) | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Significant Wave Height (m) | Peak Period (s) | Duty | Active RO Membrane Area (m2) | RO Feed Pressure (Mpa) | Unweighted | Weighted | Captured by WEC | Consumed by Charge Pump | Produced by Generator |
| 0.75 | 9.9 | 0.23 | 666 | 30.0 | 261 | 4.99 | 22.7 | 5.8 | 5.8 |
| 0.75 | 12.2 | 0.28 | 814 | 23.8 | 314 | 1.66 | 27.0 | 6.9 | 6.9 |
| 1.25 | 5.2 | 0.23 | 851 | 30.0 | 334 | 0.0334 | 29.1 | 7.4 | 7.4 |
| 1.75 | 14.5 | 0.26 | 3700 | 30.0 | 2056 | 15.62 | 201.2 | 45.3 | 45.3 |
| 2.25 | 8.7 | 0.23 | 2997 | 30.0 | 1150 | 60.35 | 99.4 | 25.3 | 25.3 |
| 2.25 | 19.1 | 0.26 | 3700 | 30.0 | 2208 | 0.442 | 222.0 | 48.7 | 48.7 |
| 3.25 | 13.3 | 0.30 | 3700 | 30.0 | 3040 | 43.16 | 350.1 | 67.0 | 67.0 |
| 3.25 | 14.5 | 0.30 | 3700 | 30.0 | 3013 | 23.81 | 345.7 | 66.4 | 66.4 |
| 4.25 | 11 | 0.31 | 3700 | 30.0 | 3222 | 6.77 | 381.4 | 71.0 | 71.0 |
| 4.75 | 16.8 | 0.31 | 3700 | 30.0 | 3233 | 2.26 | 383.2 | 71.3 | 71.3 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Simmons, J.W., II; Van de Ven, J.D. A Comparison of Power Take-Off Architectures for Wave-Powered Reverse Osmosis Desalination of Seawater with Co-Production of Electricity. Energies 2023, 16, 7381. https://doi.org/10.3390/en16217381
Simmons JW II, Van de Ven JD. A Comparison of Power Take-Off Architectures for Wave-Powered Reverse Osmosis Desalination of Seawater with Co-Production of Electricity. Energies. 2023; 16(21):7381. https://doi.org/10.3390/en16217381
Chicago/Turabian StyleSimmons, Jeremy W., II, and James D. Van de Ven. 2023. "A Comparison of Power Take-Off Architectures for Wave-Powered Reverse Osmosis Desalination of Seawater with Co-Production of Electricity" Energies 16, no. 21: 7381. https://doi.org/10.3390/en16217381