
A Fault Diagnosis Method Based on a Rainbow Recursive Plot and Deep Convolutional Neural Networks

Abstract
:1. Introduction
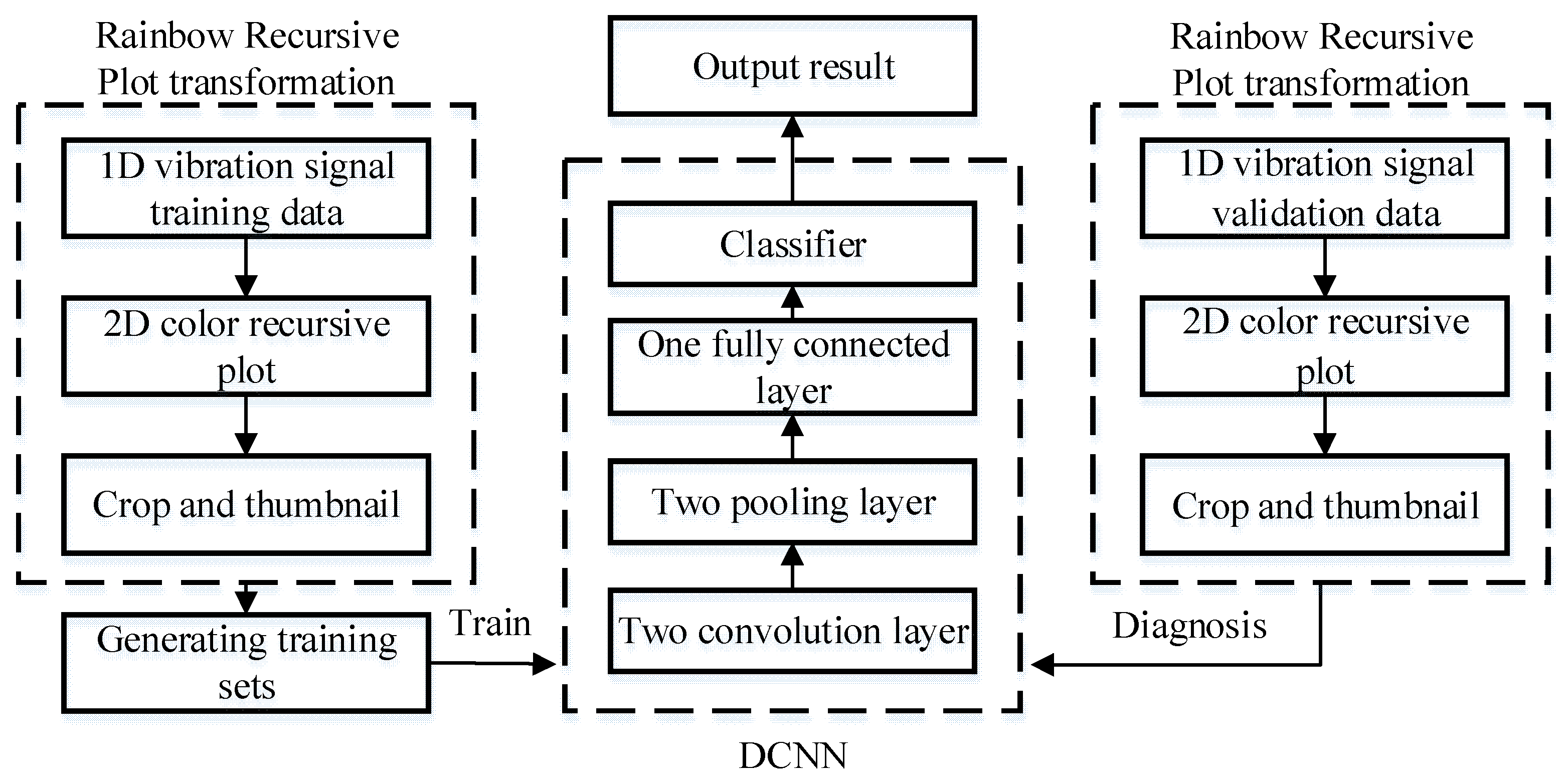
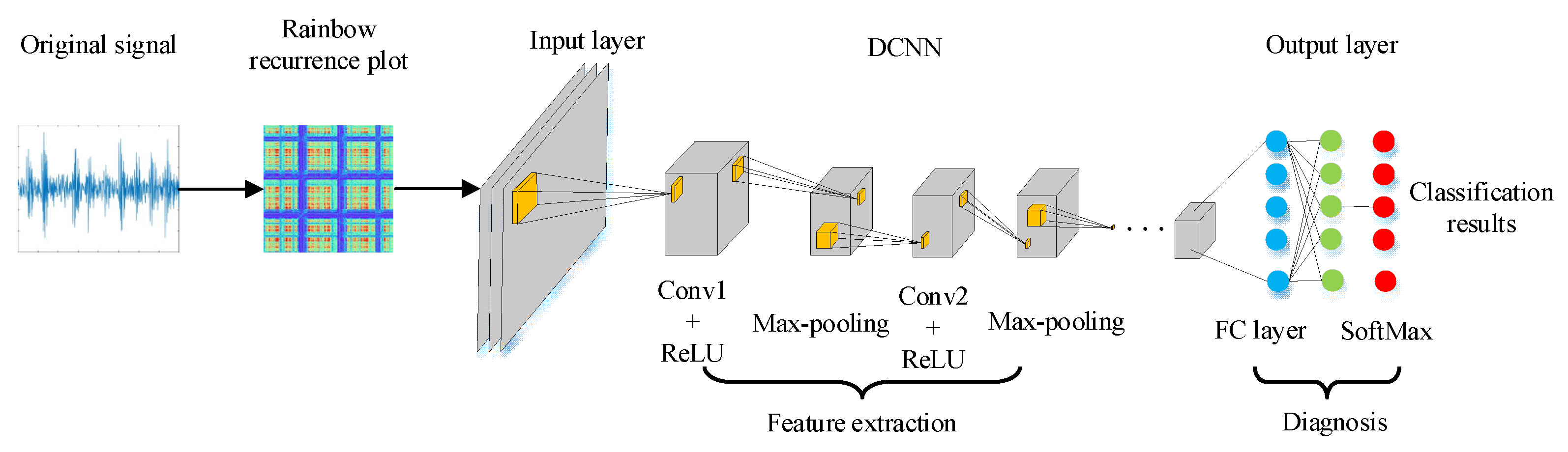
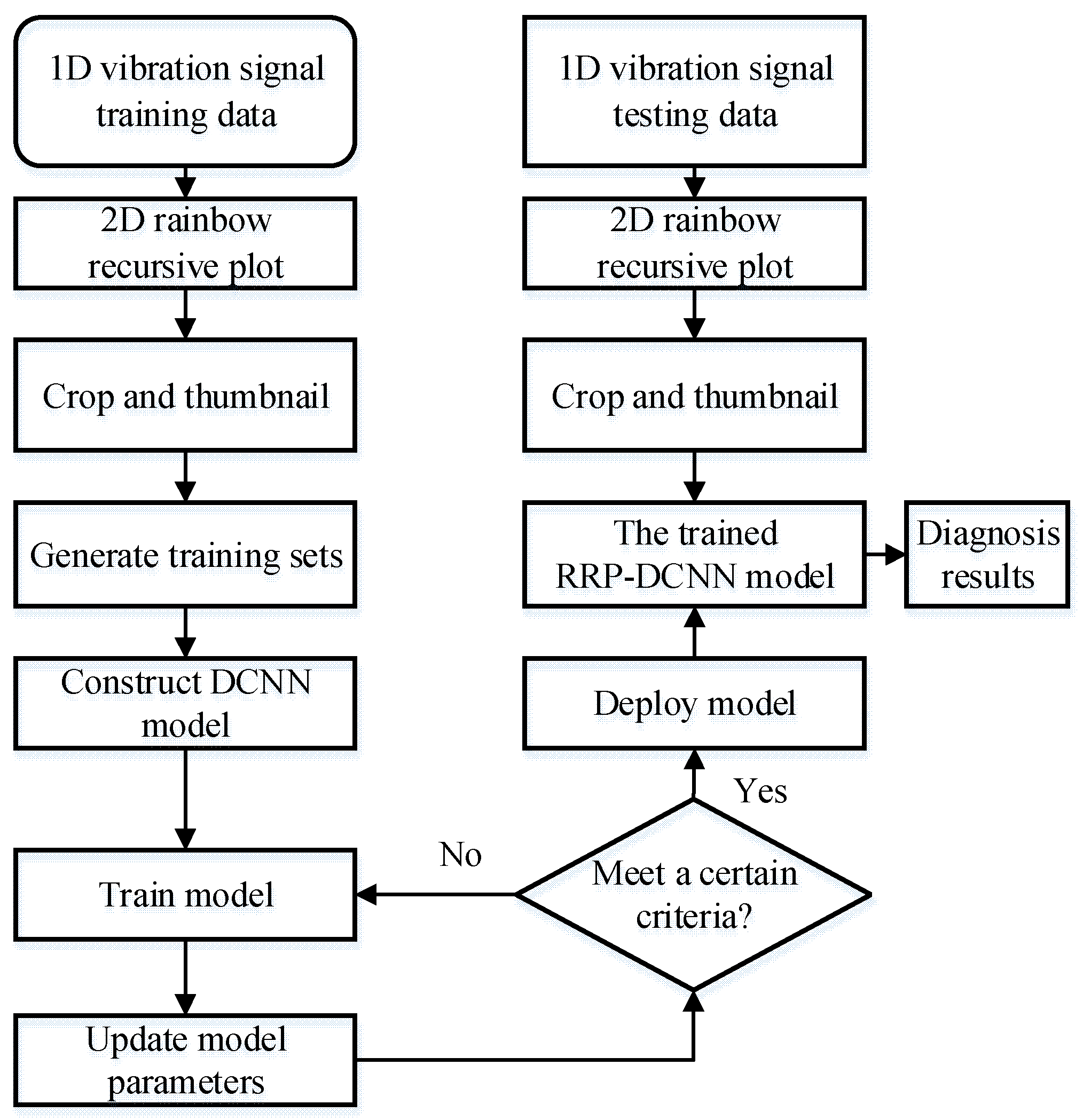
- We present a fast and effective feature extraction method. The RRP technology is used to change the one-dimensional vibration signal of bearing to a two-dimensional color image, which is transmitted to the optimized DCNN for learning and training, so as to complete the bearing fault diagnosis and recognition. The proposed method contains five successive steps. First, the one-dimensional vibration signals of bearing under normal and fault conditions are collected. Second, the one-dimensional vibration signal of bearing is converted into a two-dimensional color image by the RRP algorithm. Third, all rainbow recursive plots are preprocessed by appropriate cutting and abbreviation to improve the processing speed of the model. Fourth, the RRP dataset of bearing vibration is input to the optimized DCNN model for training. Fifth, the trained RRP-DCNN model is deployed to identify the bearing fault types.
- An improved CNN, RRP-DCNN-based bearing fault diagnosis method is proposed, which can use a little samples to perform a few learning times to obtain a high fault diagnosis accuracy rate.
- The data collected from the self-made test bench are input into RRP-DCNN for training and compared with traditional algorithms, the fault diagnosis method has been significantly improved.
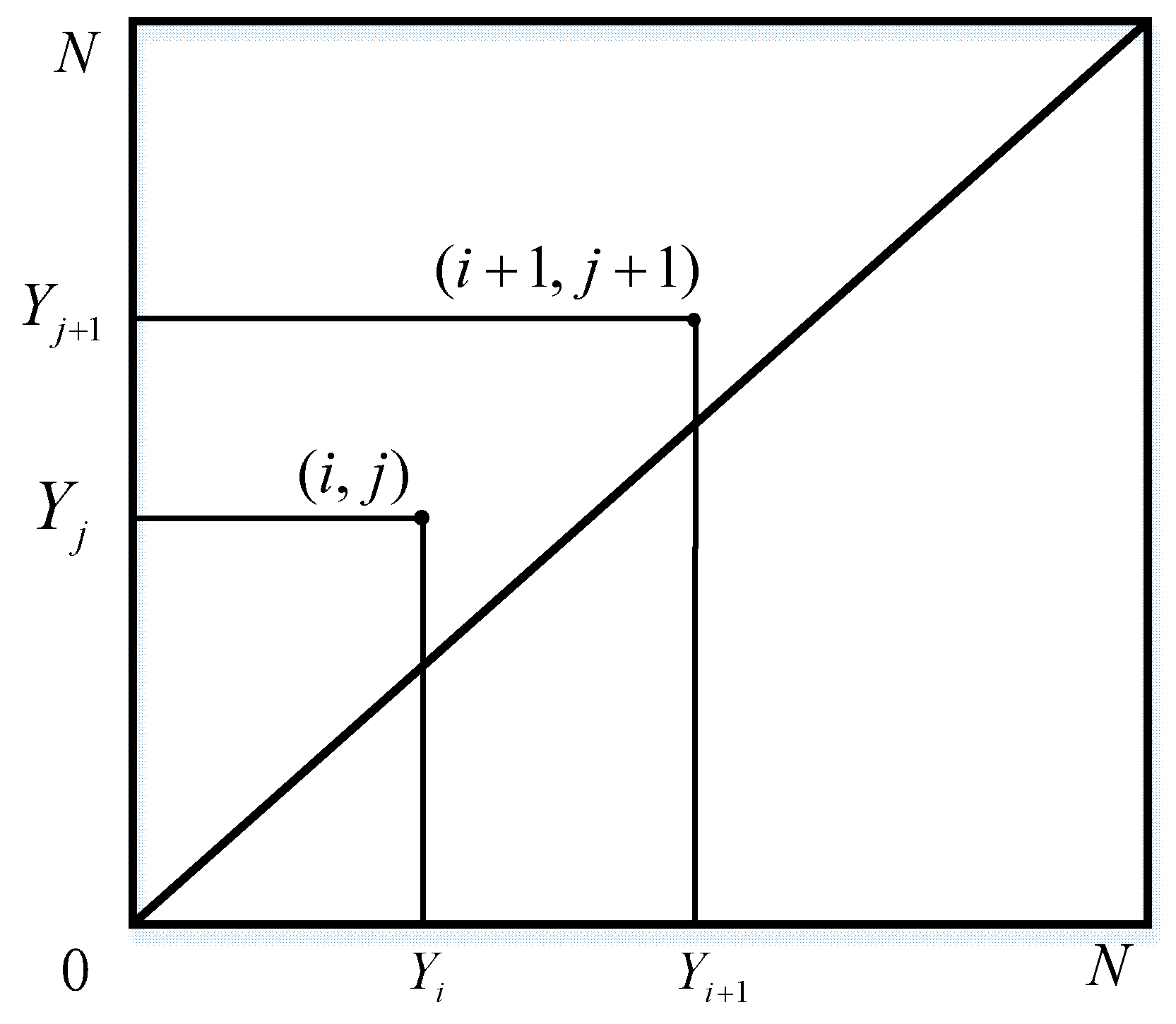
2. A Brief Introduction of RRPs
3. The Proposed RRP-DCNN Intelligent Diagnosis Method
3.1. Overview of the Proposed RRP-DCNN Model
3.2. RRP Conversion and Pretreatment
- 1.
- Acquisition of one-dimensional vibration signals: The sampling frequency of the original rotary bearing signal is 12 kHz, that is, 12,000 points are collected per second, and the rotary machinery speed R = 1750 rpm, which is 1750 revolutions per minute. From this, the minimum number of sampling points for one revolution of the bearing is calculated as:In order to ensure the integrity of the sampling information, the actual number of sampling points is taken as N ≥ 1.5, and we set N = 800.
- 2.
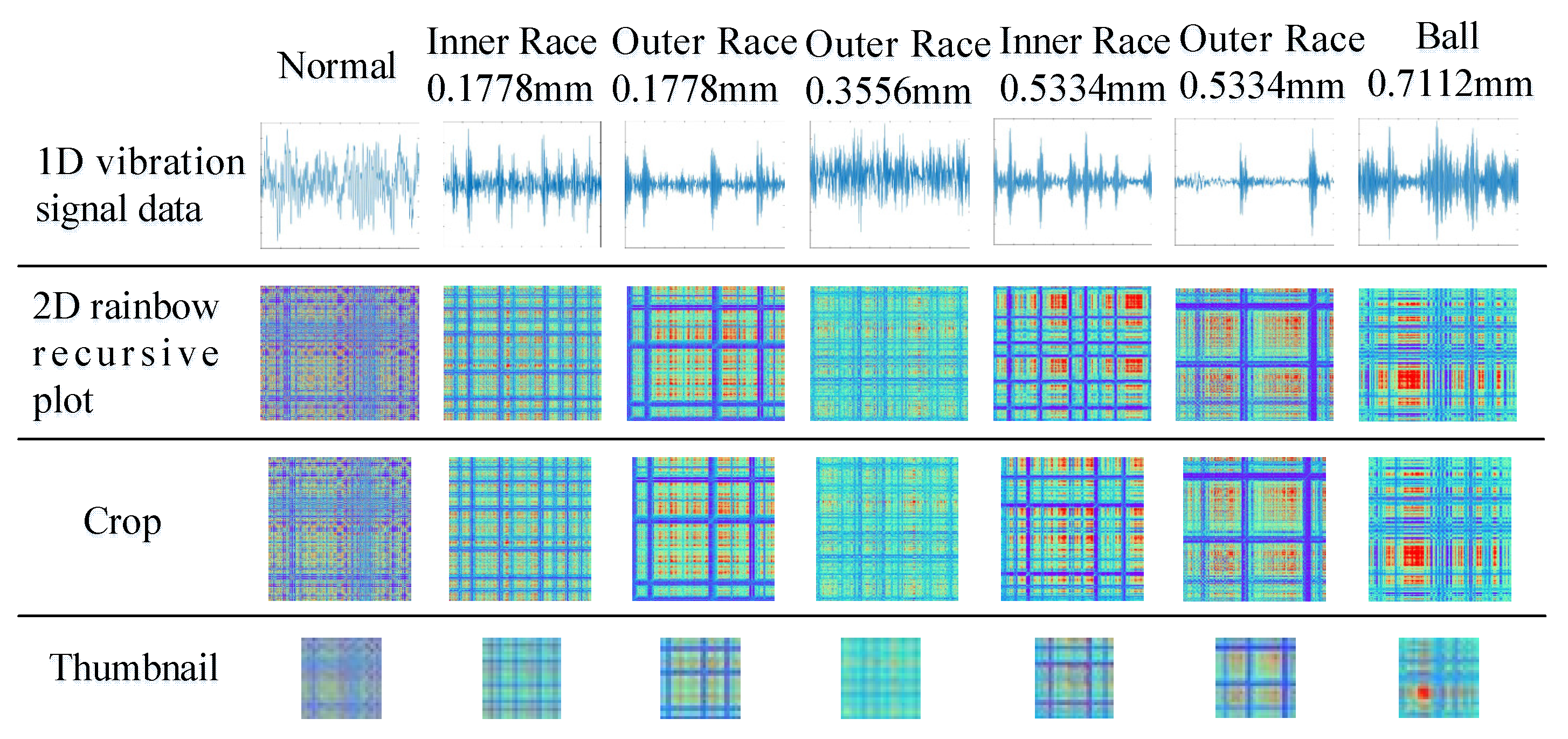
- Draw a rainbow recursive plot: The vibration signals of the bearing under different working conditions are converted into a rainbow recursive plot using the method described in Section 2. The original rainbow recursive plot has a pixel size of 360 × 400.
- 3.
- Crop the rainbow recursive plot: The pixels of the original rainbow recursive plot are large and odd, which is not conducive to the application of subsequent image recognition algorithms. The original rainbow recursive plot is cropped under the premise of ensuring the integrity of the information. Pixels of the cut rainbow recursive plot are 320 × 320.
- 4.
- Abbreviate the recursive plot: The cut rainbow recursive plot can already be used for subsequent model training, but in the course of the experiment, the training speed is found to be very slow. After many experimental verifications, under the premise of ensuring a certain training effect, the cut rainbow recursive plot is further reduced to a 32 × 32 image by the function thumbnail ( ) in the PIL library.
- 5.
- Mark the label: The preprocessed recursive thumbnails are labeled with the type of working conditions for subsequent learning and identification verification.
3.3. Design of a DCNN
3.4. Training of the DCNN
3.5. The RRP-DCNN Fault Diagnosis Process
- Collect one-dimensional vibration signals of bearing under various working conditions such as normal and fault.
- Convert the one-dimensional vibration signal of the bearing into a two-dimensional rainbow recursive plots.
- Properly crop and abbreviate all rainbow recursive plots.
- Annotate fault classification labels and divide them into a training set and a test set with a ratio of 2:1.
- Input the training set to the built DCNN model, and perform iterative training to optimize network parameters until the trained model converges.
- Save and deploy the DCNN model.
- Collect the one-dimensional vibration signal of the rotary machinery under the new working condition. After processing according to steps (2) and (3), input to the DCNN model trained in step (6) to classify and identify the rotary machinery faults.
4. Experimental Results and Analysis
4.1. Standard Dataset Validation
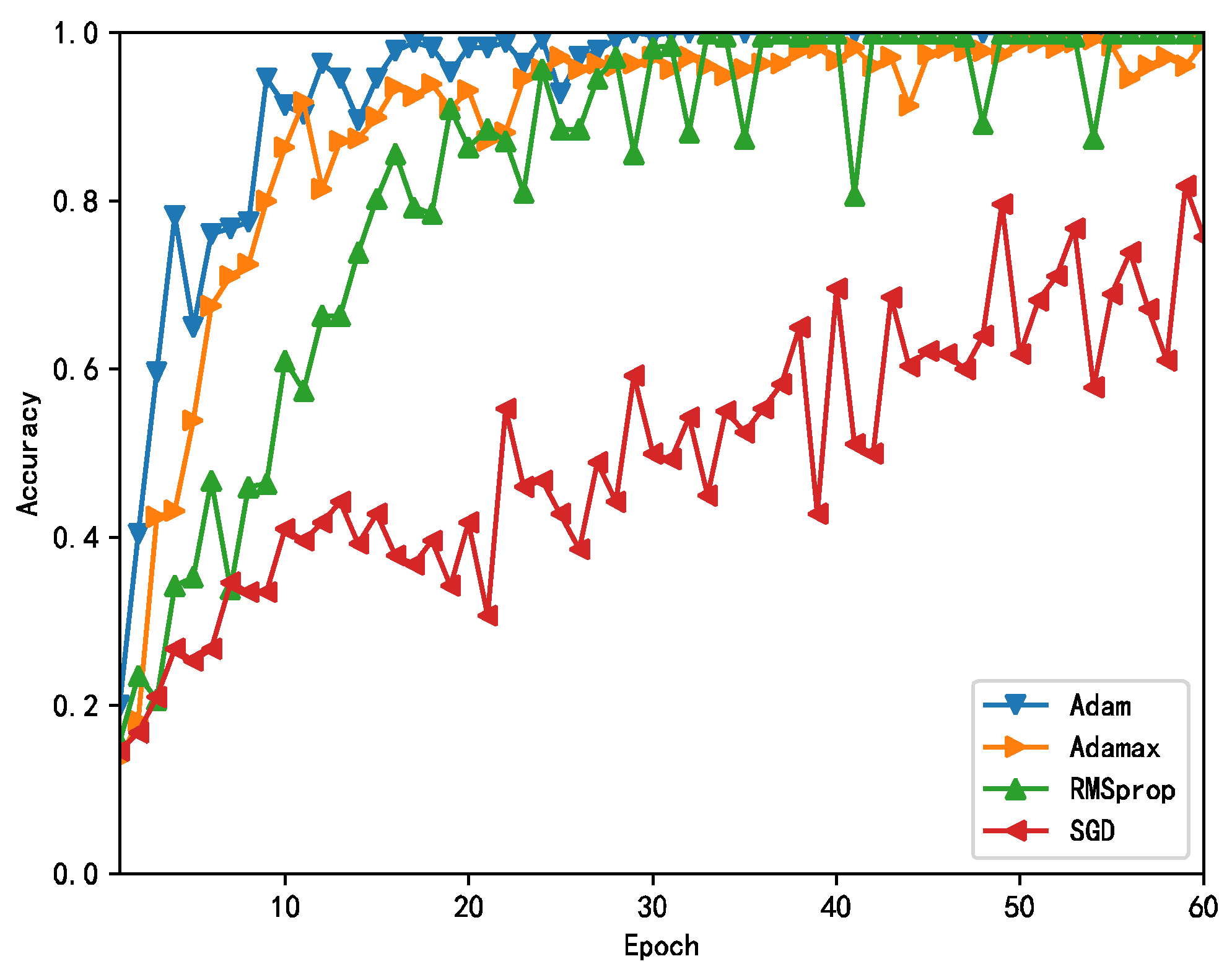
4.2. Parameters of the Proposed Model
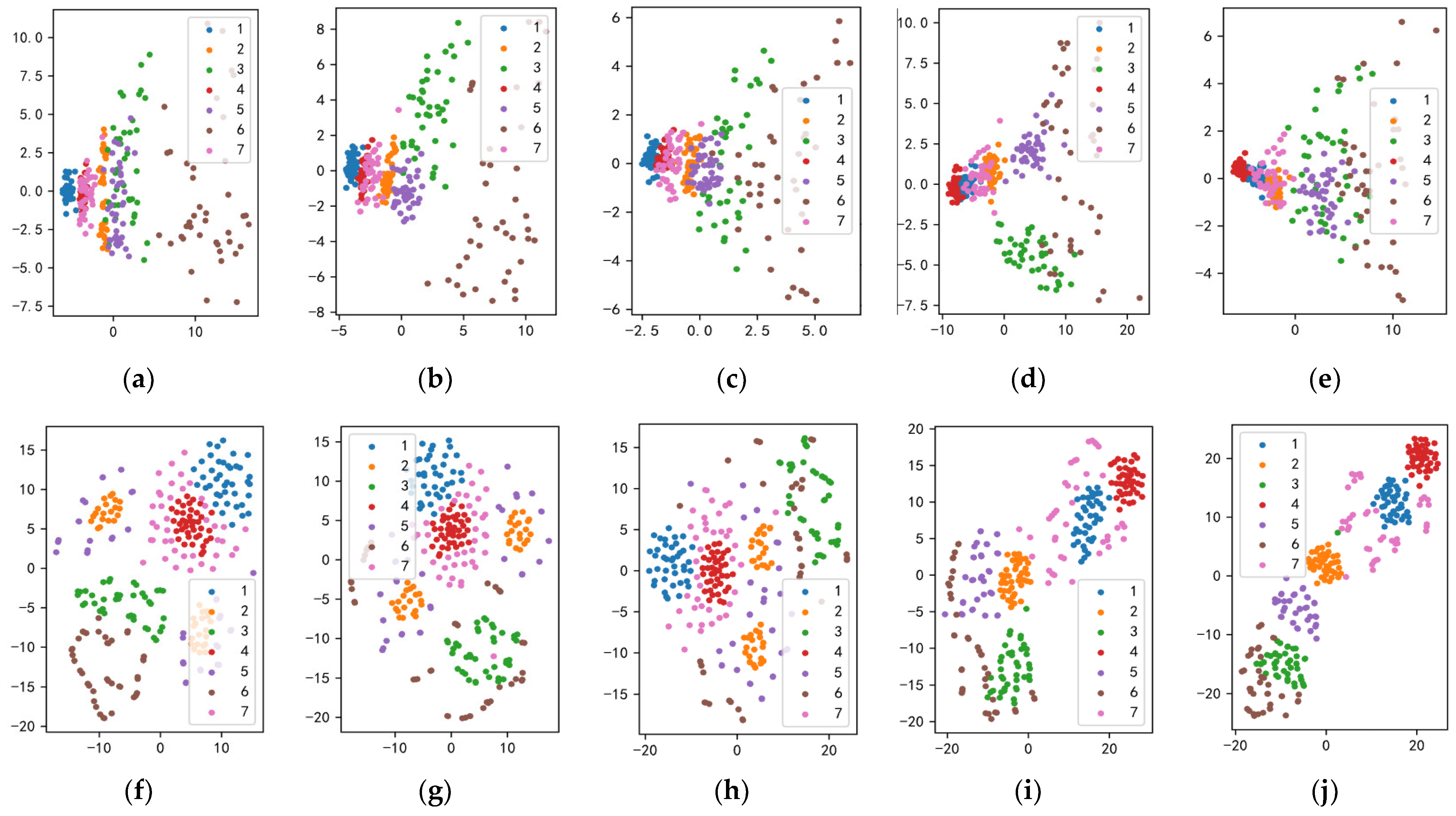
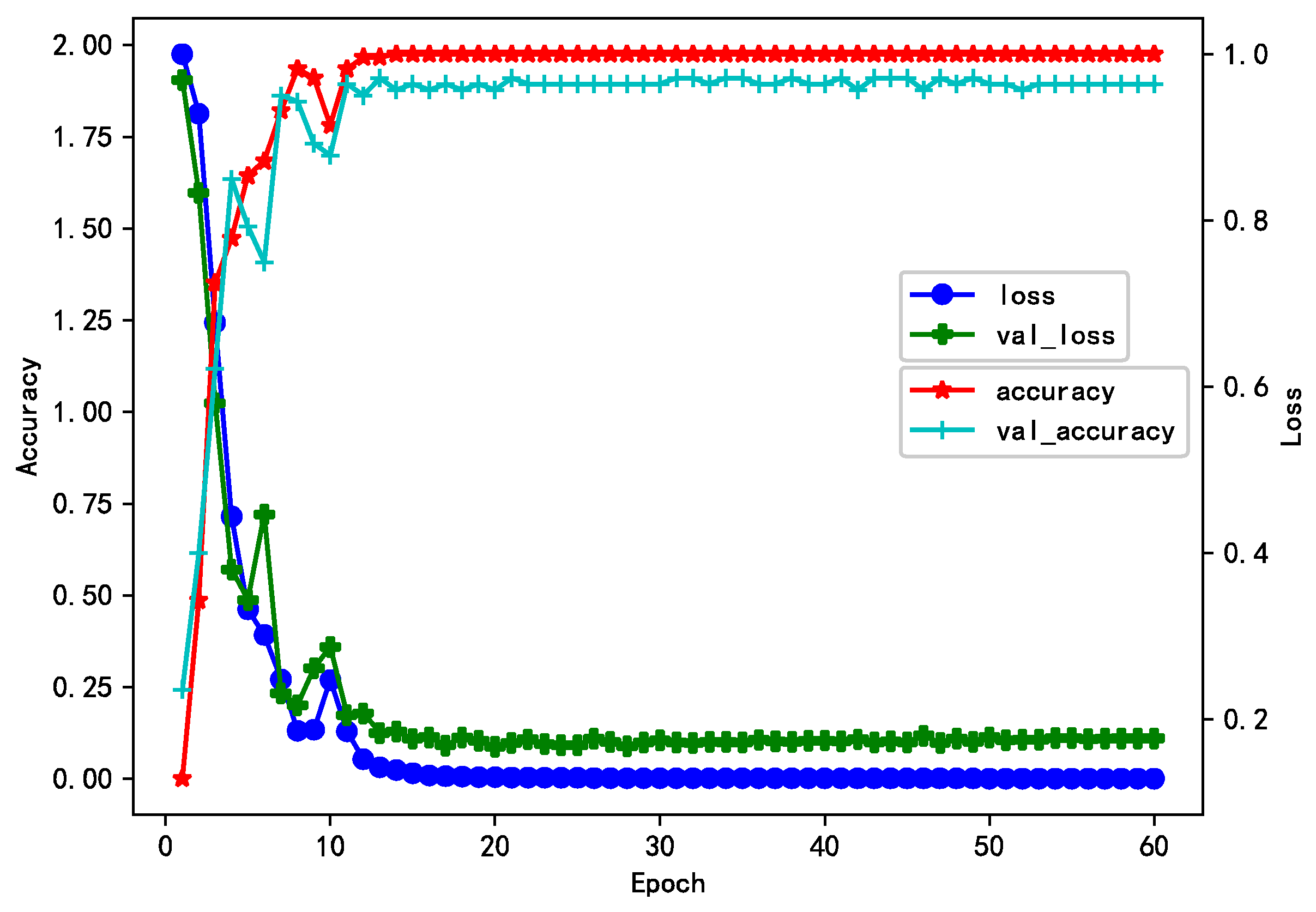
4.3. Fault Diagnosis Accuracy Assessment
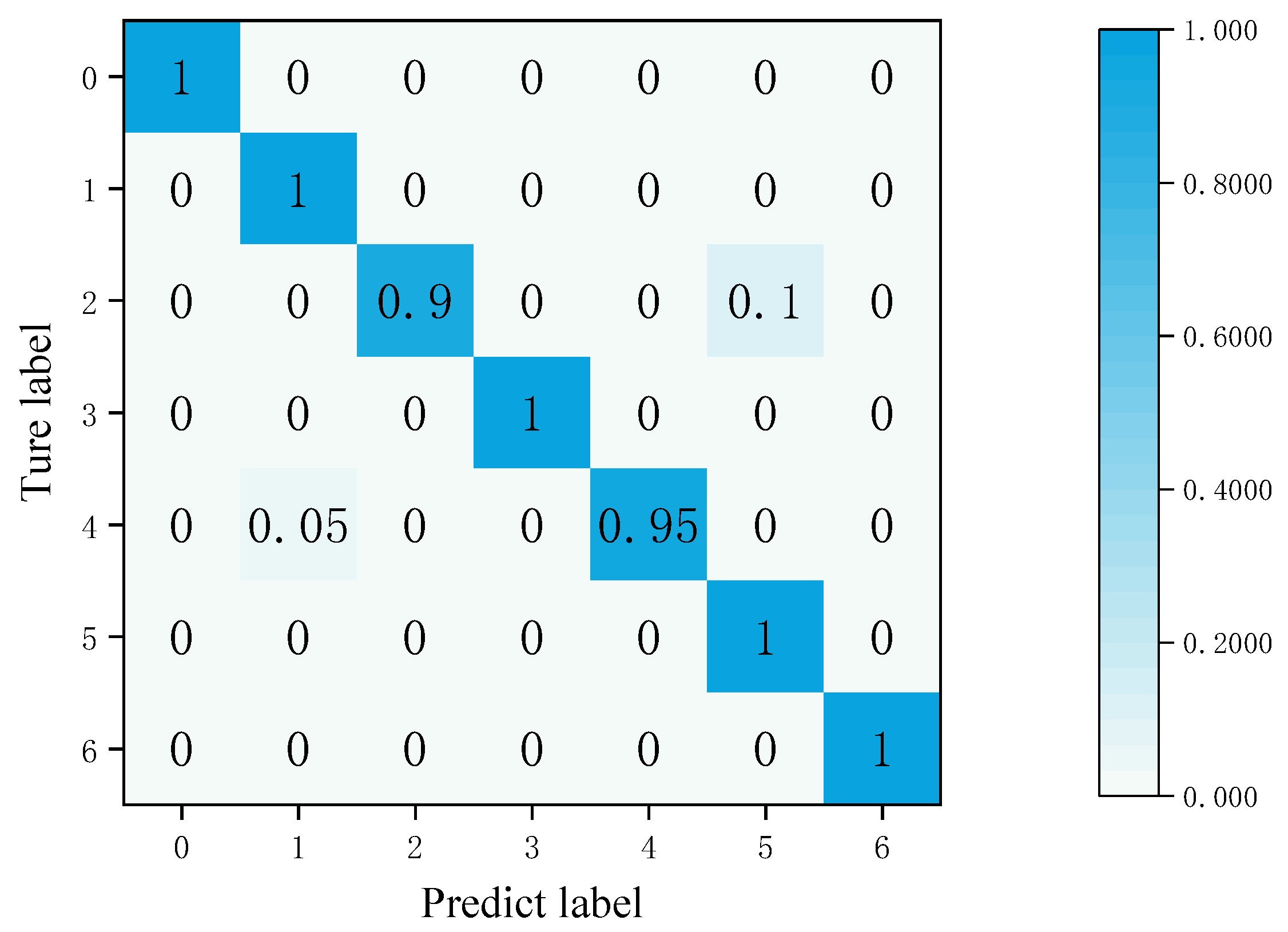
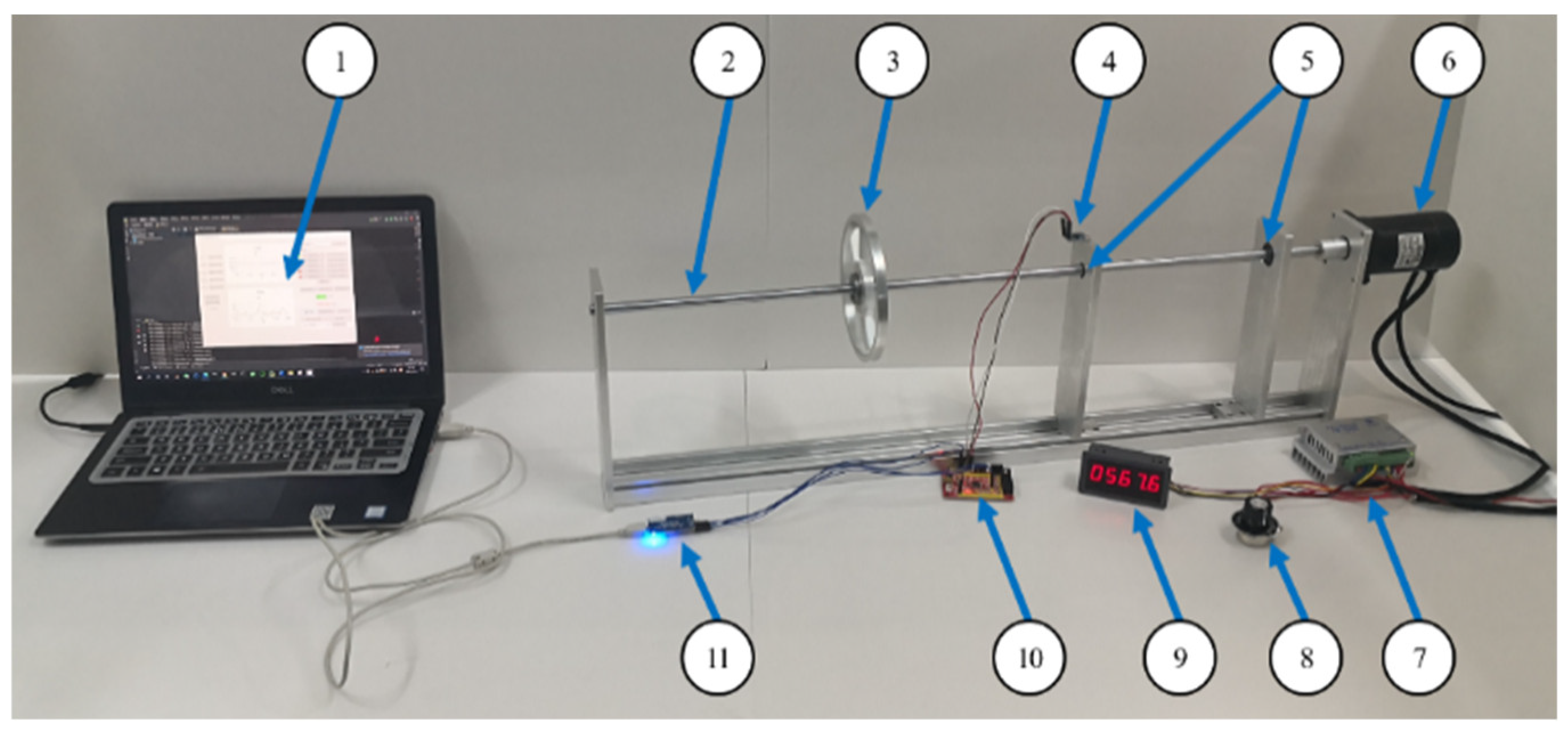
4.4. Self-Made Test Bench Verification
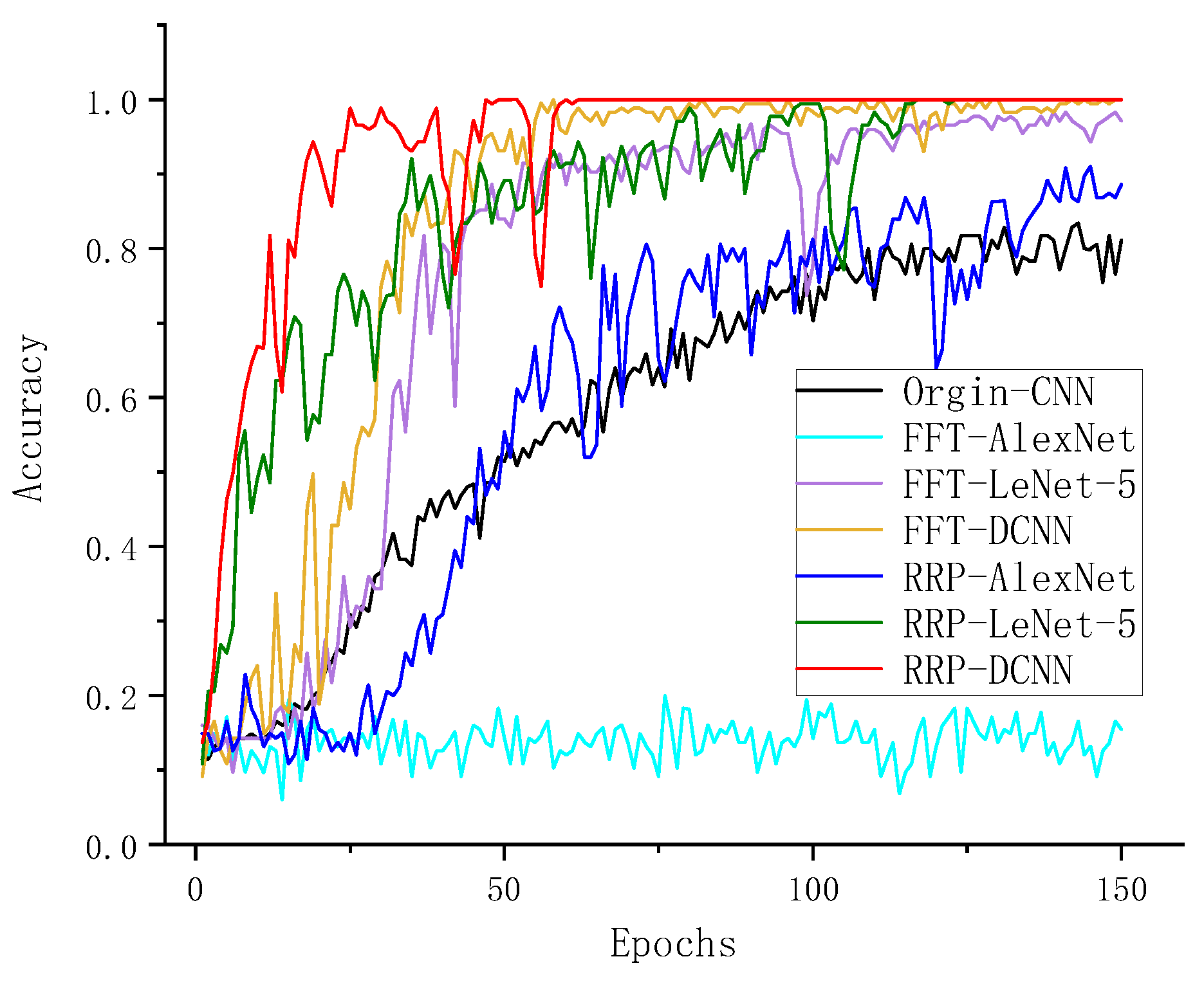
4.5. Method Comparison
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Arellano-Espitia, F.; Delgado-Prieto, M.; Martinez-Viol, V.; Saucedo-Dorantes, J.J.; Osornio-Rios, R.A. Deep-Learning-Based Methodology for Fault Diagnosis in Electromechanical Systems. Sensors 2020, 20, 3949. [Google Scholar] [CrossRef] [PubMed]
- Zhang, S.; Zhang, S.; Wang, B.; Habetler, T.G. Deep Learning Algorithms for Bearing Fault Diagnostics—A Comprehensive Review. IEEE Access 2020, 8, 29857–29881. [Google Scholar] [CrossRef]
- Yu, Y.; Liang, S.; Samali, B.; Nguyen, T.N.; Zhai, C.; Li, J.; Xie, X. Torsional capacity evaluation of RC beams using an improved bird swarm algorithm optimised 2D convolutional neural network. Eng. Struct. 2022, 273, 115066. [Google Scholar] [CrossRef]
- Yu, Y.; Rashidi, M.; Samali, B.; Mohammadi, M.; Nguyen, T.N.; Zhou, X. Crack detection of concrete structures using deep convolutional neural networks optimized by enhanced chicken swarm algorithm. Struct. Health Monit. 2022, 21, 2244–2263. [Google Scholar] [CrossRef]
- Skowron, M.; Orlowska-Kowalska, T.; Wolkiewicz, M.; Kowalski, C.T. Convolutional Neural Network-Based Stator Current Data-Driven Incipient Stator Fault Diagnosis of Inverter-Fed Induction Motor. Energies 2020, 13, 1475. [Google Scholar] [CrossRef]
- An, Z.; Li, S.; Xin, Y.; Xu, K.; Ma, H. An intelligent fault diagnosis framework dealing with arbitrary length inputs under different working conditions. Meas. Sci. Technol. 2019, 30, 125107. [Google Scholar] [CrossRef]
- Zhang, W.; Peng, G.; Li, C.; Chen, Y.; Zhang, Z. A New Deep Learning Model for Fault Diagnosis with Good Anti-Noise and Domain Adaptation Ability on Raw Vibration Signals. Sensors 2017, 17, 425. [Google Scholar] [CrossRef]
- Yang, J.; Yin, S.; Chang, Y.; Gao, T. A Fault Diagnosis Method of Rotating Machinery Based on One-Dimensional, Self-Normalizing Convolutional Neural Networks. Sensors 2020, 20, 3837. [Google Scholar] [CrossRef]
- Islam, M.M.M.; Kim, J. Automated bearing fault diagnosis scheme using 2D representation of wavelet packet transform and deep convolutional neural network. Comput. Ind. 2019, 106, 142–153. [Google Scholar] [CrossRef]
- Zhou, C.; Zhang, W. A New Process Monitoring Method Based on Waveform Signal by Using Recurrence Plot. Entropy 2015, 17, 6379–6396. [Google Scholar] [CrossRef]
- Yuan, L.; Lian, D.; Kang, X.; Chen, Y.; Zhai, K. Rolling Bearing Fault Diagnosis Based on Convolutional Neural Network and Support Vector Machine. IEEE Access 2020, 8, 137395–137406. [Google Scholar] [CrossRef]
- Koh, D.; Jeon, S.; Han, S. Performance Prediction of Induction Motor Due to Rotor Slot Shape Change Using Convolution Neural Network. Energies 2022, 15, 4129. [Google Scholar] [CrossRef]
- Garcia-Ceja, E.; Uddin, M.Z.; Torresen, J. Classification of Recurrence Plots’ Distance Matrices with a Convolutional Neural Network for Activity Recognition. Procedia. Comput. Sci. 2018, 130, 157–163. [Google Scholar] [CrossRef]
- Hirata, Y. Recurrence plots for characterizing random dynamical systems. Commun. Nonlinear Sci. Numer. Simul. 2021, 94, 105552. [Google Scholar] [CrossRef]
- Marwan, N.; Carmen Romano, M.; Thiel, M.; Kurths, J. Recurrence plots for the analysis of complex systems. Phys. Rep. 2007, 438, 237–329. [Google Scholar] [CrossRef]
- Shi, Y.; Guo, Y.; Yao, T.; Liu, Z. Sea-Surface Small Floating Target Recurrence Plots FAC Classification Based on CNN. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5115713. [Google Scholar] [CrossRef]
- Wang, X.; Wang, X.; Zhang, X.; Chen, Q. Motor Fault Diagnosis Under Variable Working Conditions Based on Two-Dimensional Time Series and Transfer Learning. In Proceedings of the 25th International Conference on Electrical Machines and Systems (ICEMS), Chiang Mai, Thailand, 2 December 2022; pp. 1–5. [Google Scholar]
- Zhang, Z. From Artificial Neural Networks to Deep Learning: A Research Survey. J. Phys. Conf. Ser. 2020, 1576, 12030. [Google Scholar] [CrossRef]
- Wang, Y.; Li, F.; Sun, H.; Li, W.; Zhong, C.; Wu, X.; Wang, H.; Wang, P. Improvement of MNIST Image Recognition Based on CNN. IOP Conf. Ser. Earth Environ. Sci. 2020, 428, 12097. [Google Scholar] [CrossRef]
- Xu, G.; Liu, M.; Jiang, Z.; Shen, W.; Huang, C. Online Fault Diagnosis Method Based on Transfer Convolutional Neural Networks. IEEE Trans. Instrum. Meas. 2020, 69, 509–520. [Google Scholar] [CrossRef]
- Wang, K.; Chen, C.; He, Y. Research on pig face recognition model based on keras convolutional neural network. IOP Conf. Ser. Earth Environ. Sci. 2020, 474, 32030. [Google Scholar] [CrossRef]
- Wen, L.; Li, X.; Gao, L.; Zhang, Y. A New Convolutional Neural Network-Based Data-Driven Fault Diagnosis Method. IEEE Trans. Ind. Electron. 2018, 65, 5990–5998. [Google Scholar] [CrossRef]
- Chen, Z.; Li, C.; Sanchez, R. Gearbox Fault Identification and Classification with Convolutional Neural Networks. Shock Vib. 2015, 2, 390134. [Google Scholar] [CrossRef]
- Gao, S.; Xu, L.; Zhang, Y.; Pei, Z. Rolling bearing fault diagnosis based on intelligent optimized self-adaptive deep belief network. Meas. Sci. Technol. 2020, 31, 55009. [Google Scholar] [CrossRef]
- Xue, J.; Chen, Y.; Li, O.; Li, F. Classification and identification of unknown network protocols based on CNN and T-SNE. J. Physics. Conf. Ser. 2020, 1617, 12071. [Google Scholar] [CrossRef]
- Garg, I.; Panda, P.; Roy, K. A Low Effort Approach to Structured CNN Design Using PCA. IEEE Access 2020, 8, 1347–1360. [Google Scholar] [CrossRef]
- Wang, X.; Wang, X.; Chen, Q.; Zhang, X. Design of Experimental Platform for Motor Fault Diagnosis Based on Embedded System and Shallow Neural Network. In Proceedings of the 25th International Conference on Electrical Machines and Systems (ICEMS), Chiang Mai, Thailand, 2 December 2022; pp. 1–5. [Google Scholar]
- Ma, P.; Zhang, H.; Fan, W.; Wang, C.; Wen, G.; Zhang, X. A novel bearing fault diagnosis method based on 2D image representation and transfer learning-convolutional neural network. Meas. Sci. Technol. 2019, 30, 55402. [Google Scholar] [CrossRef]
- Zhang, X.; Han, P.; Xu, L.; Zhang, F.; Wang, Y.; Gao, L. Research on Bearing Fault Diagnosis of Wind Turbine Gearbox Based on 1DCNN-PSO-SVM. IEEE Access 2020, 8, 192248–192258. [Google Scholar] [CrossRef]
- Xiao, Y.; Wei, X.Z. Specific emitter identification of radar based on one dimensional convolution neural network. J. Phys. Conf. Ser. 2020, 1550, 32114. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number | Layer Type | Kernel Size | Step | Number of Kernels | Output Size |
|---|---|---|---|---|---|
| 1 | Conv | 3 × 3 | 1 | 16 | 32 × 32 × 16 |
| 2 | BatchNorm2d | 32 × 32 × 16 | |||
| 3 | MaxPool2d | 2 × 2 | 2 | 16 | 16 × 16 × 16 |
| 4 | Conv2d | 3 × 3 | 1 | 32 | 16 × 16 × 32 |
| 5 | BatchNorm2d | 16 × 16 × 32 | |||
| 6 | MaxPool2d | 2 × 2 | 2 | 32 | 8 × 8 × 16 |
| 7 | Fully connected | 2048 | 1 | 2048 × 1 | |
| 8 | Fully connected | 256 | 1 | 256 × 1 | |
| 9 | Softmax | 7 | 1 | 7 |
| Label | Fault Location | Damaged Degree/mm | Data Name | Train | Test |
|---|---|---|---|---|---|
| 0 | Normal | - | 99.mat | 40 | 20 |
| 1 | Inner Race | 0.1778 | 107.mat | 40 | 20 |
| 2 | Outer Race | 0.1778 | 159.mat | 40 | 20 |
| 3 | Outer Race | 0.3556 | 199.mat | 40 | 20 |
| 4 | Inner Race | 0.5334 | 211.mat | 40 | 20 |
| 5 | Outer Race | 0.5334 | 260.mat | 40 | 20 |
| 6 | Ball | 0.7112 | 3007.mat | 40 | 20 |
| Label | Fault Type | Eccentric Wheels Specifications | Train | Test |
|---|---|---|---|---|
| 0 | Imbalance 1 | Disk 1 | 70 | 30 |
| 1 | Imbalance 2 | Disk 2 | 70 | 30 |
| 2 | Imbalance 3 | Disk 3 | 70 | 30 |
| 3 | Imbalance 4 | Disk 4 | 70 | 30 |
| 4 | Imbalance 5 | Disk 5 | 70 | 30 |
| 5 | Imbalance 6 | Disk 6 | 70 | 30 |
| 6 | Imbalance 7 | Disk 7 | 70 | 30 |
| Condition Label | Results | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Algorithm | 0 | 1 | 2 | 3 | 4 | 5 | 6 | Training Time (s) | Identification Time (s) | Average Accuracy (%) |
| Orgin-CNN | 46.7 | 26.7 | 93.3 | 60.0 | 93.3 | 33.3 | 93.3 | 3.2588186 | 0.0003233 | 63.81 |
| FFT-AlexNet | 0.0 | 0.0 | 100.0 | 0.0 | 0.0 | 0.0 | 0.0 | 135.9444344 | 0.0023147 | 14.29 |
| FFT-LeNet-5 | 100.0 | 93.3 | 100.0 | 100.0 | 100.0 | 73.3 | 100.0 | 27.3925648 | 0.0006411 | 95.24 |
| FFT-DCNN | 86.7 | 93.3 | 100.0 | 100.0 | 100.0 | 86.7 | 100.0 | 23.1145761 | 0.0005811 | 95.24 |
| RRP-AlexNet | 91.1 | 100.0 | 55.6 | 44.4 | 93.3 | 82.2 | 88.9 | 179.5841630 | 0.0019357 | 79.37 |
| RRP-LeNet-5 | 100.0 | 100.0 | 97.8 | 88.9 | 97.8 | 100.0 | 88.9 | 35.3096957 | 0.0006984 | 96.19 |
| RRP-DCNN | 100.0 | 97.8 | 97.8 | 100.0 | 100.0 | 100.0 | 88.9 | 30.0779228 | 0.0006553 | 97.78 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, X.; Wang, X.; Li, T.; Zhao, X. A Fault Diagnosis Method Based on a Rainbow Recursive Plot and Deep Convolutional Neural Networks. Energies 2023, 16, 4357. https://doi.org/10.3390/en16114357
Wang X, Wang X, Li T, Zhao X. A Fault Diagnosis Method Based on a Rainbow Recursive Plot and Deep Convolutional Neural Networks. Energies. 2023; 16(11):4357. https://doi.org/10.3390/en16114357
Chicago/Turabian StyleWang, Xiaoyuan, Xin Wang, Tianyuan Li, and Xiaoxiao Zhao. 2023. "A Fault Diagnosis Method Based on a Rainbow Recursive Plot and Deep Convolutional Neural Networks" Energies 16, no. 11: 4357. https://doi.org/10.3390/en16114357