
Design and Implementation of a Driving Strategy for Star-Connected Active Magnetic Bearings with Application to Sensorless Driving

Abstract
:1. Introduction
2. Materials and Methods
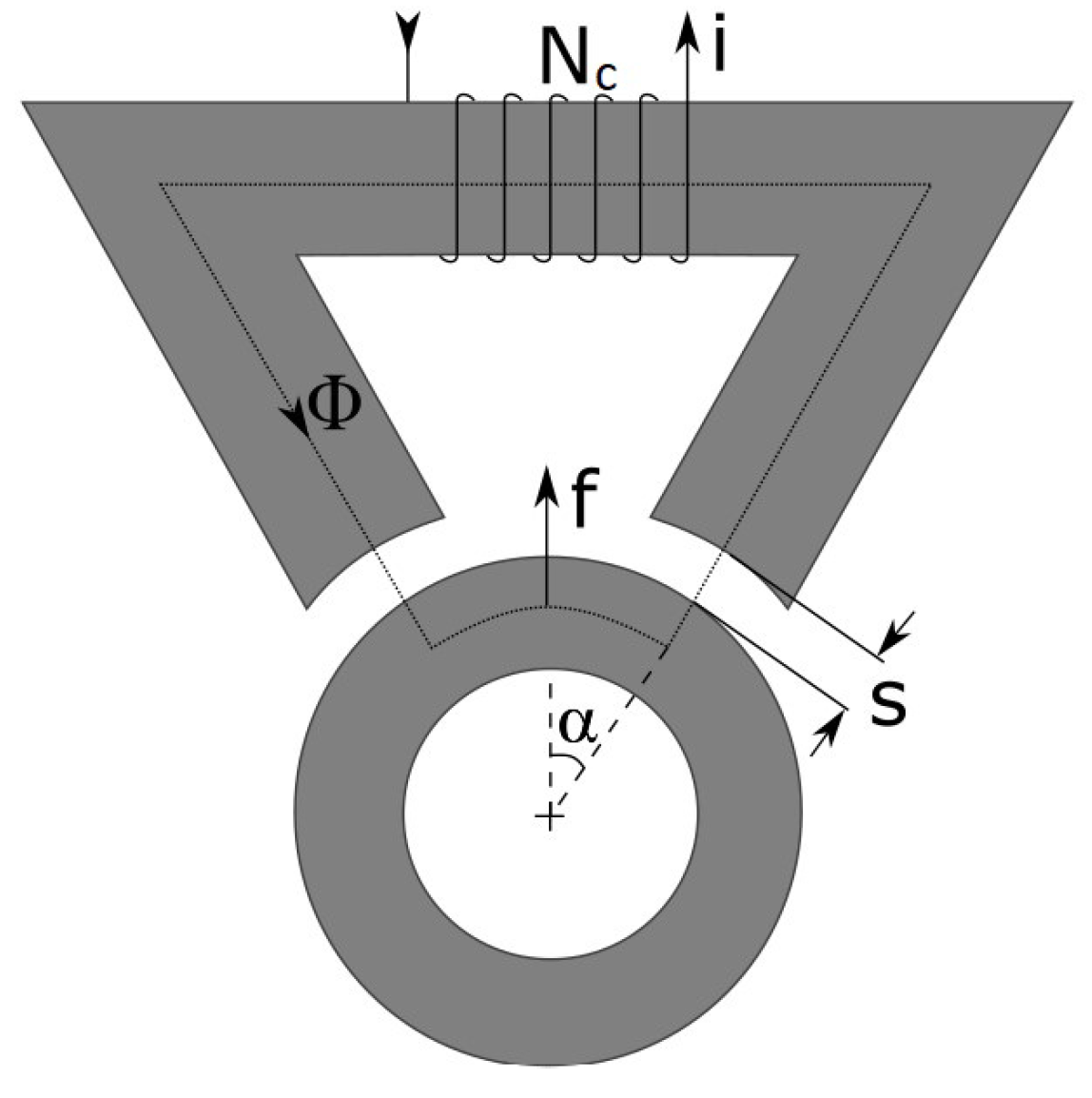
2.1. Basic Theory of AMBs
2.2. Proposed Driving Method with Star Connection
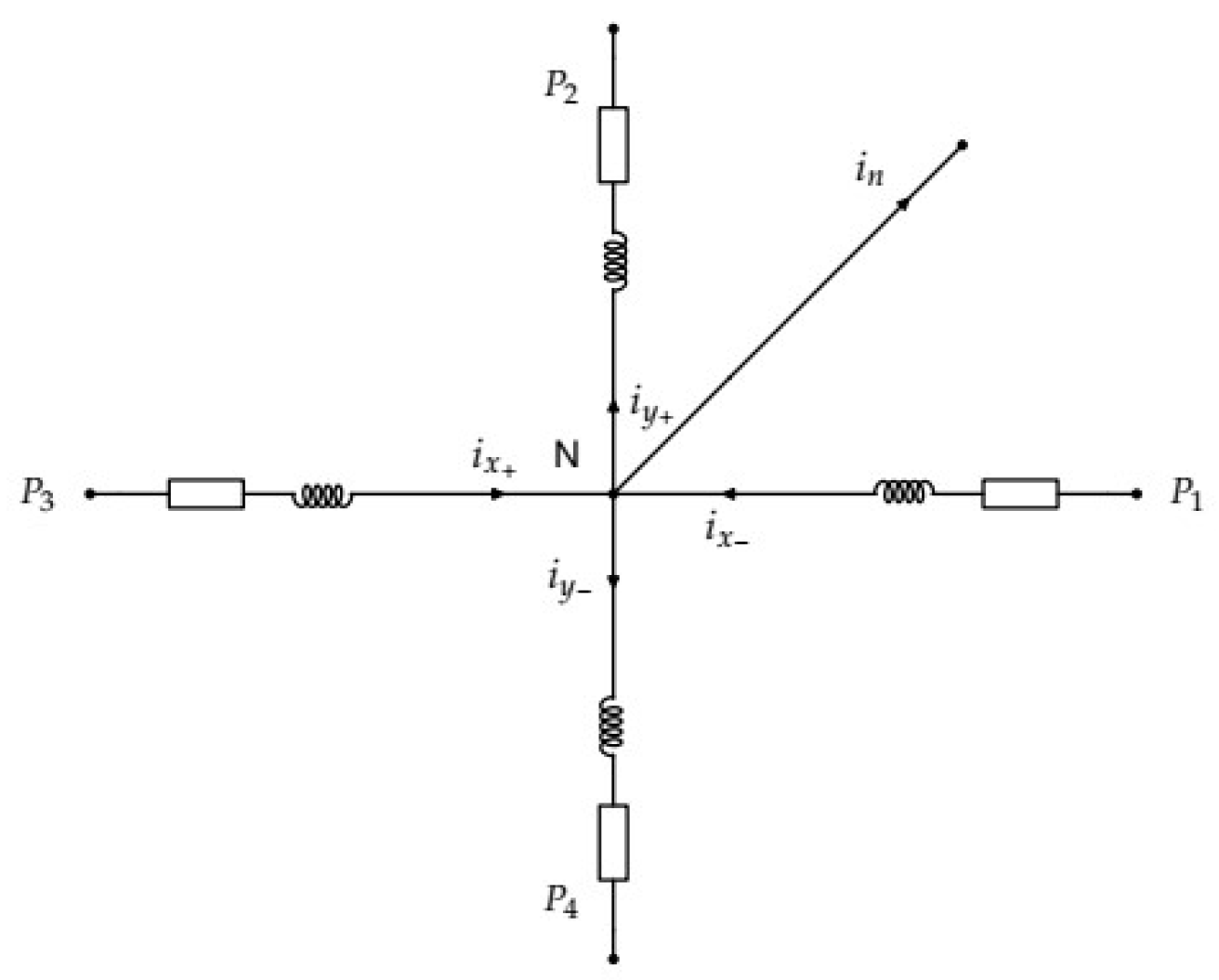
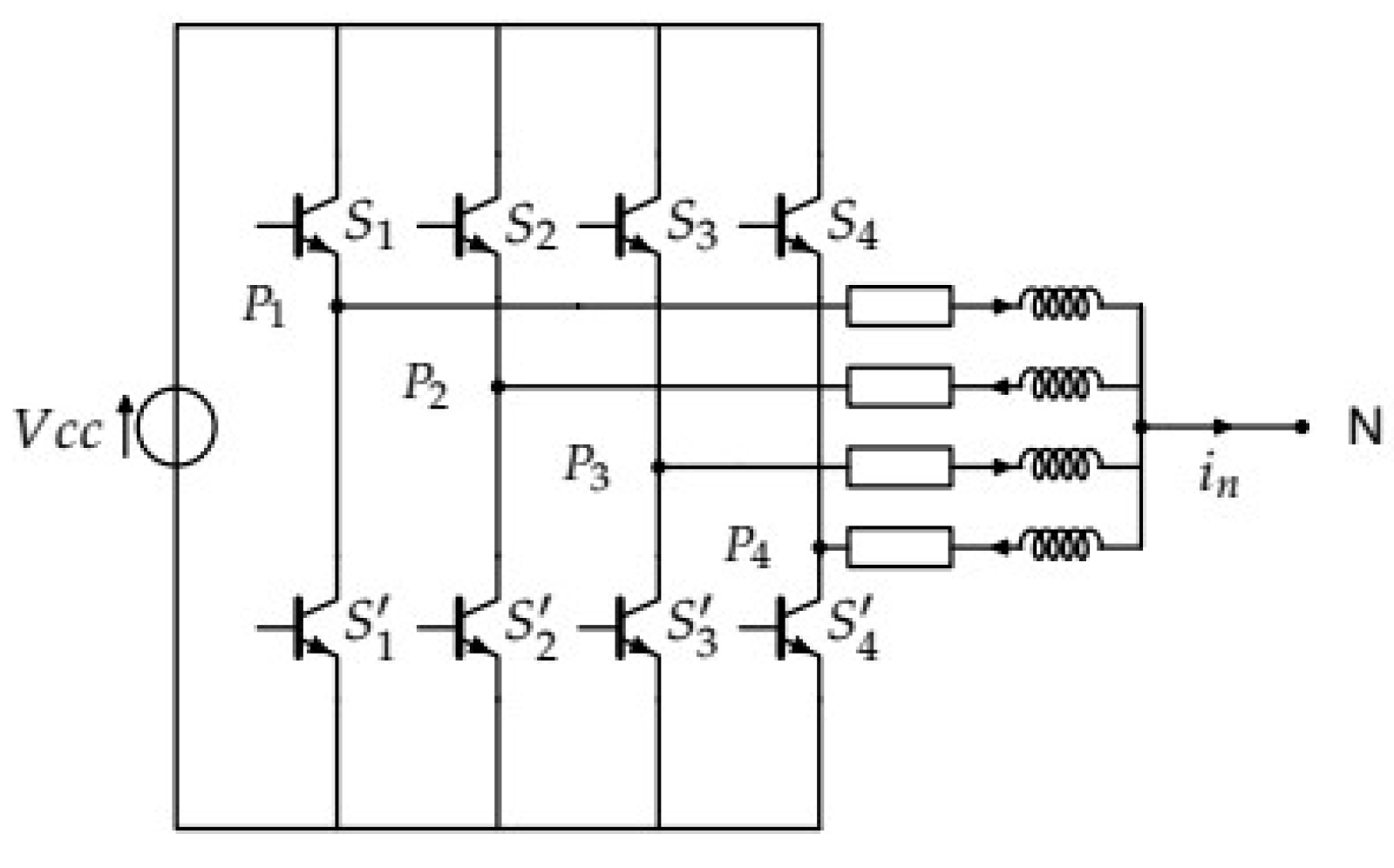
2.2.1. For Four-Phase AMB Topology
2.2.2. For 4n-Phase AMB Topology
3. Simulative Validation
3.1. Simulation Model and Parameters
3.2. Simulation Results
- Step 1 (from 0 to 0.33 s): the disturbance force N with starting condition m and m;
- Step 2 (from 0.33 to 0.66 s): N;
- Step 3 (from 0.66 to 1.0 s): N the limit disturbance force that one axis of the star-connected AMB can bear.
4. Experimental Validation
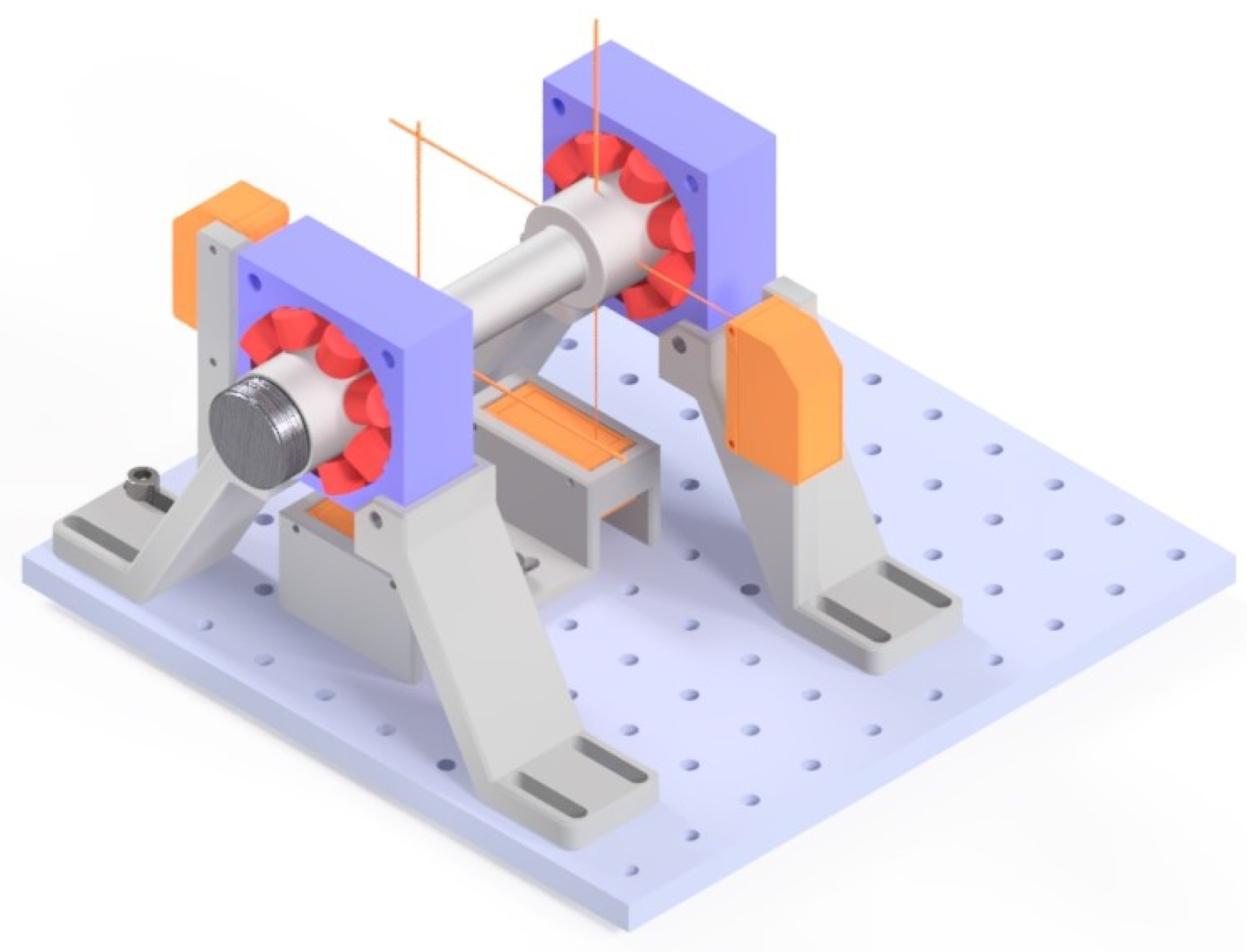
4.1. Experimental Setup
4.2. Experiment Results
5. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| List of Symbols: | |
| reference displacement in x direction | |
| measured displacement in x direction | |
| initial rotor displacement in x direction | |
| reference displacement in y direction | |
| measured displacement in y direction | |
| initial rotor displacement in y direction | |
| control error | |
| current error | |
| u | voltage |
| i | current |
| bias current | |
| current in the star point | |
| f | force |
| disturbance force | |
| permeability of vacuum | |
| number of windings in a coil | |
| A | cross-section area |
| angle between the legs of the AMB | |
| s | magnetic air gap |
| inverse transformation matrix | |
| generalised transformation matrix | |
| inverse generalised transformation matrix | |
| angle between the phases | |
| P | phases |
| S | transistors |
| nominal magnetic air gap | |
| magnetic flux | |
| k | machine constant |
| force/current factor | |
| force/displacement factor | |
| transformation matrix | |
| List of Indices: | |
| * | control reference |
| x | in x direction |
| y | in x direction |
| + | in positive direction |
| − | in negative direction |
References
- Maslen, E.H.; Schweitzer, G. (Eds.) Magnetic Bearings: Theory, Design, and Application to Rotating Machinery; Springer: Berlin/Heidelberg, Germany, 2009. [Google Scholar] [CrossRef]
- Bleuler, H. A Survey of Magnetic Levitation and Magnetic Bearing Types. JSME Int. Journal. Ser. 3 Vib. Control. Eng. Eng. Ind. 1992, 35, 335–342. [Google Scholar] [CrossRef] [Green Version]
- Kucera, L. Robustness of Self-Sensing Magnetic Bearing. In Proceedings of the Magnetic Bearings Industrial Conference, Alexandria, VA, USA, 21–22 August 1997; p. 10. [Google Scholar]
- Noh, M. Self-Sensing Magnetic Bearings Driven by a Switching Power Amplifier. Ph.D. Thesis, University of Virginia, Charlottesville, VA, USA, 1996. [Google Scholar]
- Li, L.; Shinshi, T.; Shimokohbe, A. State Feedback Control for Active Magnetic Bearings Based on Current Change Rate Alone. IEEE Trans. Magn. 2004, 40, 3512–3517. [Google Scholar] [CrossRef]
- García, P.; Guerrero, J.M.; Briz, F.; Reigosa, D.D. Sensorless Control of Three-Pole Active Magnetic Bearings Using Saliency-Tracking-Based Methods. IEEE Trans. Ind. Appl. 2010, 46, 1476–1484. [Google Scholar] [CrossRef]
- Benjak, O.; Gerling, D. Review of position estimation methods for IPMSM drives without a position sensor part II: Adaptive methods. In Proceedings of the The XIX International Conference on Electrical Machines—ICEM 2010, Rome, Italy, 6–8 September 2010; IEEE: Rome, Italy, 2010. [Google Scholar] [CrossRef]
- Benjak, O.; Gerling, D. Review of Position Estimation Methods for PMSM Drives Without a Position Sensor, Part III: Methods based on Saliency and Signal Injection. In Proceedings of the 2010 International Conference on Electrical Machines and Systems, Incheon, Republic of Korea, 10–13 October 2010. [Google Scholar]
- Benjak, O.; Gerling, D. Review of position estimation methods for IPMSM drives without a position sensor part I: Nonadaptive methods. In Proceedings of the The XIX International Conference on Electrical Machines—ICEM 2010, Rome, Italy, 6–8 September 2010; IEEE: Rome, Italy, 2010. [Google Scholar] [CrossRef]
- Strothmann, R. Fremderregte Elektrische Maschine. EP Patent EP1005716B1, 14 November 2001. [Google Scholar]
- Mantala, C. Sensorless Control of Brushless Permanent Magnet Motors. Ph.D. Thesis, University of Bolton, Bolton, UK, 2013. [Google Scholar]
- Schuhmacher, K.; Grasso, E.; Nienhaus, M. Improved rotor position determination for a sensorless star-connected PMSM drive using Direct Flux Control. J. Eng. 2019, 2019, 3749–3753. [Google Scholar] [CrossRef]
- Werner, T. Geberlose Rotorlagebestimmung in Elektrischen Maschinen; Springer: Wiesbaden, Germany, 2018. [Google Scholar] [CrossRef]
- Grasso, E.; Mandriota, R.; König, N.; Nienhaus, M. Analysis and Exploitation of the Star-Point Voltage of Synchronous Machines for Sensorless Operation. Energies 2019, 12, 4729. [Google Scholar] [CrossRef] [Green Version]
- Grasso, E. Direct Flux Control—A Sensorless Technique for Star-Connected Synchronous Machines—An Analytic Approach; Shaker: Herzogenrath, Germany, 2021. [Google Scholar]
- Seiphetlho, T.E. Power Electronic Activation for Active Magnetic Bearings. Ph.D. Thesis, North-West University, Kirkland, WA, USA, 2006. [Google Scholar]
- Bartholet, M.T.; Nussbaumer, T.; Kolar, J.W. Comparison of Voltage-Source Inverter Topologies for Two-Phase Bearingless Slice Motors. IEEE Trans. Ind. Electron. 2011, 58, 1921–1925. [Google Scholar] [CrossRef]
- Jiang, D.; Li, T.; Hu, Z.; Sun, H. Novel Topologies of Power Electronics Converter as Active Magnetic Bearing Drive. IEEE Trans. Ind. Electron. 2020, 67, 950–959. [Google Scholar] [CrossRef]
- He, Y.; He, X.; Ma, J.; Fang, Y. Optimization Research on a Switching Power Amplifier and a Current Control Strategy of Active Magnetic Bearing. IEEE Access 2020, 8, 34833–34841. [Google Scholar] [CrossRef]
- Jiang, D.; Kshirsagar, P. Analysis and control of a reduced switch converter for active magnetic bearings. In Proceedings of the 2016 IEEE Applied Power Electronics Conference and Exposition (APEC), Long Beach, CA, USA, 20 March 2016; IEEE: Long Beach, CA, USA, 2016; pp. 3616–3622. [Google Scholar] [CrossRef]
- Hu, Z.; Jiang, D.; Sun, H.; Qu, R. A Shared-bridge Converter with Reversed Current Direction for Active Magnetic Bearing Drive. In Proceedings of the 2019 10th International Conference on Power Electronics and ECCE Asia (ICPE 2019—ECCE Asia), Busan, Republic of Korea, 27–31 May 2019; pp. 1–7. [Google Scholar]
- Hu, Y.; Yang, K.; Guo, X.; Zhou, J.; Wu, H. Evaluation of the Topology of Switching Power Amplifiers for Active Magnetic Bearings. Proceedings 2020, 64, 25. [Google Scholar] [CrossRef]
- Yang, J.; Jiang, D.; Sun, H.; Li, A.; Liu, Z. Series-winding Topology Converter for Active Magnetic Bearing Drive. IEEE Trans. Ind. Electron. 2020, 68, 11772–11782. [Google Scholar] [CrossRef]
- Schroeder, D. Elektrische Antriebe—Regelung von Antriebssystemen; Springer: Berlin/Heidelberg, Germany, 2015. [Google Scholar]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value | Unit |
|---|---|---|---|
| Mass of the rotor | m | kg | |
| Nominal magnetic air gap | m | ||
| Nominal mechanical air gap | m | ||
| Bias current | A | ||
| Coil resistance | R | ||
| Coil inductance | L | H | |
| Electromagnet factor | k | Hm | |
| Force-displacement factor | N/m | ||
| Force-current factor | N/A | ||
| DC-link voltage for star-connected inverter | 24 | V | |
| DC-link voltage for H-bridges | 12 | V | |
| PWM frequency | Hz | ||
| Current sensor frequency | Hz |
| Gain | Symbol | Value |
|---|---|---|
| Proportional | 14.53 | |
| Integral | 6400 |
| Gain | Symbol | Value |
|---|---|---|
| Proportional | ||
| Integral | ||
| Derivative | ||
| Filter coefficient | 1000 |
| Phase | ||||
|---|---|---|---|---|
| Minimum air gap | 2.18 | 1.84 | 1.87 | 2.09 |
| Maximum air gap | 1.17 | 1.17 | 1.17 | 1.17 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Brasse, R.; Vennemann, J.; König, N.; Nienhaus, M.; Grasso, E. Design and Implementation of a Driving Strategy for Star-Connected Active Magnetic Bearings with Application to Sensorless Driving. Energies 2023, 16, 396. https://doi.org/10.3390/en16010396
Brasse R, Vennemann J, König N, Nienhaus M, Grasso E. Design and Implementation of a Driving Strategy for Star-Connected Active Magnetic Bearings with Application to Sensorless Driving. Energies. 2023; 16(1):396. https://doi.org/10.3390/en16010396
Chicago/Turabian StyleBrasse, Romain, Jonah Vennemann, Niklas König, Matthias Nienhaus, and Emanuele Grasso. 2023. "Design and Implementation of a Driving Strategy for Star-Connected Active Magnetic Bearings with Application to Sensorless Driving" Energies 16, no. 1: 396. https://doi.org/10.3390/en16010396