
A Comprehensive Review of Machine-Integrated Electric Vehicle Chargers

 , ,
, ,
Abstract
:1. Introduction
2. Charging Standards and Commercially Available Chargers
3. Integrated Chargers
4. Challenges with Machine-Integrated OBCs
5. Conclusions and Future Aspects
- Most of the integrated chargers are non-isolated, and authors suggested using an off-board isolation transformer. This makes the whole concept of the OBC and integrated OBC less useful, as it will limit the use of OBCs to only be used in charging stations; thus, integrated chargers with on-board isolation need to be explored.
- Since the same power electronics components will be utilized for traction and charging purposes, their utilization time is increased. This will have impact on their reliability. A study of the power electronics components with enhanced utilization rates is needed in order to determine the adverse effect on reliability.
- The cost effectiveness of integrated chargers needs to be investigated when considering reliability and maintenance issues.
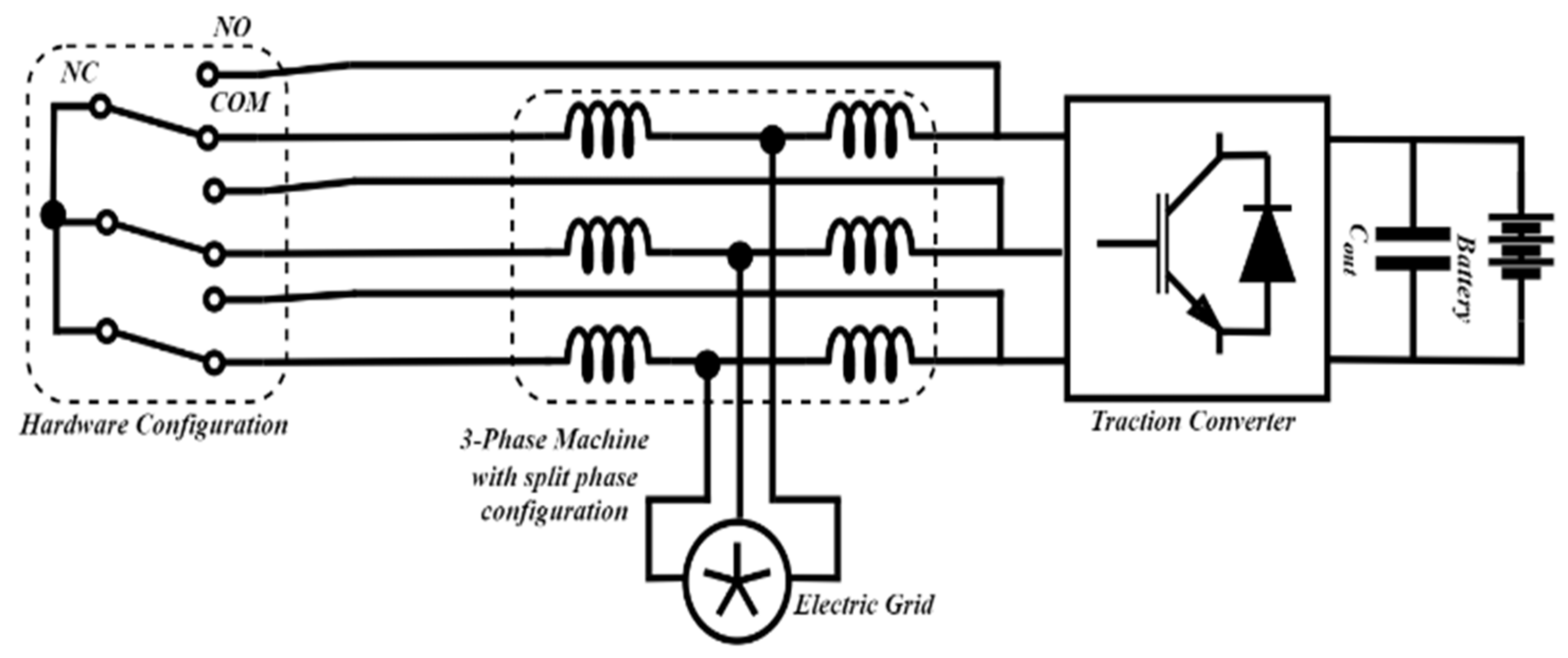
- When utilizing the machine inductance as a filter, charging current through them may produce torque; higher-phase machines provide extra flexibility in terms of control and may present a good option to overcome this issue. Accordingly, their utilization needs to be investigated along with an effective comparison, in terms of their performance and cost, with the conventional three-phase machines.
- The low-speed drives for applications like golf-carts utilize the switched reluctance motor. Integrated charger configuration for SRM-based drives needs to be investigated in order to reduce their cost and improve effectiveness.
Funding
Conflicts of Interest
References
- Element Energy Limited. Electric Cars: Calculating the Total Cost of Ownership for Consumers; Element Energy Limited: Cambridge, UK, 2021; p. 44. [Google Scholar]
- Habib, S.; Khan, M.M.; Abbas, F.; Sang, L.; Shahid, M.U.; Tang, H. A comprehensive study of implemented international standards, technical challenges, impacts and prospects for electric vehicles. IEEE Access 2018, 6, 13866–13890. [Google Scholar] [CrossRef]
- Ahmad, A.; Alam, M.S.; Chabaan, R. A comprehensive review of wireless charging technologies for electric vehicles. IEEE Trans. Transp. Electrif. 2017, 4, 38–63. [Google Scholar] [CrossRef]
- Trends and Developments in Electric Vehicle Markets—Global EV Outlook 2021—Analysis—IEA. Available online: https://www.iea.org/reports/global-ev-outlook-2021/trends-and-developments-in-electric-vehicle-markets (accessed on 17 September 2022).
- Chakraborty, S.; Vu, H.N.; Hasan, M.M.; Tran, D.D.; Baghdadi, M.E.; Hegazy, O. DC-DC converter topologies for electric vehicles, plug-in hybrid electric vehicles and fast charging stations: State of the art and future trends. Energies 2019, 12, 1569. [Google Scholar] [CrossRef] [Green Version]
- Global EV Market Outlook. Available online: https://www.eetasia.com/global-ev-market-outlook/ (accessed on 9 November 2022).
- Ashique, R.H.; Salam, Z.; Aziz, M.J.B.A.; Bhatti, A.R. Integrated photovoltaic-grid dc fast charging system for electric vehicle: A review of the architecture and control. Renew. Sustain. Energy Rev. 2017, 69, 1243–1257. [Google Scholar] [CrossRef]
- Ehsani, M.; Gao, Y.; Miller, J.M. Hybrid electric vehicles: Architecture and motor drives. Proc. IEEE 2007, 95, 719–728. [Google Scholar] [CrossRef]
- Benevieri, A.; Carbone, L.; Cosso, S.; Kumar, K.; Marchesoni, M.; Passalacqua, M.; Vaccaro, L. Series Architecture on Hybrid Electric Vehicles: A Review. Energies 2021, 14, 7672. [Google Scholar] [CrossRef]
- Sabri, M.F.M.; Danapalasingam, K.A.; Rahmat, M.F. A review on hybrid electric vehicles architecture and energy management strategies. Renew. Sustain. Energy Rev. 2016, 53, 1433–1442. [Google Scholar] [CrossRef]
- Singh, K.V.; Bansal, H.O.; Singh, D. A comprehensive review on hybrid electric vehicles: Architectures and components. J. Mod. Transp. 2019, 27, 77–107. [Google Scholar] [CrossRef] [Green Version]
- Yilmaz, M.; Krein, P.T. Review of battery charger topologies, charging power levels, and infrastructure for plug-in electric and hybrid vehicles. IEEE Trans. Power Electron. 2012, 28, 2151–2169. [Google Scholar] [CrossRef]
- Das, H.S.; Rahman, M.M.; Li, S.; Tan, C.W. Electric vehicles standards, charging infrastructure, and impact on grid integration: A technological review. Renew. Sustain. Energy Rev. 2020, 120, 109618. [Google Scholar] [CrossRef]
- Khalid, M.R.; Khan, I.A.; Hameed, S.; Asghar, M.S.J.; Ro, J.S. A comprehensive review on structural topologies, power levels, energy storage systems, and standards for electric vehicle charging stations and their impacts on grid. IEEE Access 2021, 9, 128069–128094. [Google Scholar] [CrossRef]
- Ruiz, V.; Pfrang, A.; Kriston, A.; Omar, N.; Van den Bossche, P.; Boon-Brett, L. A review of international abuse testing standards and regulations for lithium-ion batteries in electric and hybrid electric vehicles. Renew. Sustain. Energy Rev. 2018, 81, 1427–1452. [Google Scholar] [CrossRef]
- Sam, C.A.; Jegathesan, V. Bidirectional integrated on-board chargers for electric vehicles—A review. Sādhanā 2021, 46, 1–14. [Google Scholar] [CrossRef]
- Yan, X.; Li, J.; Zhang, B.; Jia, Z.; Tian, Y.; Zeng, H.; Lv, Z. Virtual synchronous motor based-control of a three-phase electric vehicle off-board charger for providing fast-charging service. Appl. Sci. 2018, 8, 856. [Google Scholar] [CrossRef] [Green Version]
- Yildirim, D.; Öztürk, S.; Çadirci, I.; Ermiş, M. All SiC PWM rectifier-based off-board ultrafast charger for heavy electric vehicles. IET Power Electron. 2020, 13, 483–494. [Google Scholar] [CrossRef]
- Solero, L. Nonconventional on-board charger for electric vehicle propulsion batteries. IEEE Trans. Veh. Technol. 2001, 50, 144–149. [Google Scholar] [CrossRef]
- Raj, J.S.S.; Sivaraman, P.; Prem, P.; Matheswaran, A. Wide Band Gap semiconductor material for electric vehicle charger. Mater. Today Proc. 2021, 45, 852–856. [Google Scholar]
- Abdelrahman, A.S.; Erdem, Z.; Attia, Y.; Youssef, M.Z. Wide bandgap devices in electric vehicle converters: A performance survey. Can. J. Electr. Comput. Eng. 2018, 41, 45–54. [Google Scholar] [CrossRef]
- Oh, C.Y.; Kim, D.H.; Woo, D.G.; Sung, W.Y.; Kim, Y.S.; Lee, B.K. A high-efficient non-isolated single-stage on-board battery charger for electric vehicles. IEEE Trans. Power Electron. 2013, 28, 5746–5757. [Google Scholar] [CrossRef]
- Monteiro, V.; Pinto, J.G.; Afonso, J.L. Operation modes for the electric vehicle in smart grids and smart homes: Present and proposed modes. IEEE Trans. Veh. Technol. 2015, 65, 1007–1020. [Google Scholar] [CrossRef] [Green Version]
- Tashakor, N.; Farjah, E.; Ghanbari, T. A bidirectional battery charger with modular integrated charge equalization circuit. IEEE Trans. Power Electron. 2016, 32, 2133–2145. [Google Scholar] [CrossRef]
- Gohari, H.S.; Abbaszadeh, K. A novel controllable bidirectional switching-capacitor based Buck-Boost charger for EVs. In Proceedings of the 2020 11th Power Electronics, Drive Systems, and Technologies Conference (PEDSTC 2020), Tehran, Iran, 4–6 February 2020; pp. 1–6. [Google Scholar]
- Liao, Y.H. A novel reduced switching loss bidirectional AC/DC converter PWM strategy with feedforward control for grid-tied microgrid systems. IEEE Trans. Power Electron. 2013, 29, 1500–1513. [Google Scholar] [CrossRef]
- Kwon, M.; Choi, S. An electrolytic capacitorless bidirectional EV charger for V2G and V2H applications. IEEE Trans. Power Electron. 2016, 32, 6792–6799. [Google Scholar] [CrossRef]
- Xue, L.; Shen, Z.; Boroyevich, D.; Mattavelli, P.; Diaz, D. Dual active bridge-based battery charger for plug-in hybrid electric vehicle with charging current containing low frequency ripple. IEEE Trans. Power Electron. 2015, 30, 7299–7307. [Google Scholar] [CrossRef] [Green Version]
- Lee, B.K.; Kim, J.P.; Kim, S.G.; Lee, J.Y. An isolated/bidirectional PWM resonant converter for V2G (H) EV on-board charger. IEEE Trans. Veh. Technol. 2017, 66, 7741–7750. [Google Scholar] [CrossRef]
- Texas Instruments Inc. Designing 6.6 kw Bidirectional hev/ev on-Board Charger with SiC and Embedded Technologies; Texas Instruments Inc.: Dallas, TX, USA, 2019. [Google Scholar]
- Tang, Y.; Ding, W.; Khaligh, A. A bridgeless totem-pole interleaved PFC converter for plug-in electric vehicles. In Proceedings of the 2016 IEEE Applied Power Electronics Conference and Exposition (APEC 2016), Long Beach, CA, USA, 20–24 March 2016; pp. 440–445. [Google Scholar]
- Liu, Z.; Li, B.; Lee, F.C.; Li, Q. High-efficiency high-density critical mode rectifier/inverter for WBG-device-based on-board charger. IEEE Trans. Ind. Electron. 2017, 64, 9114–9123. [Google Scholar] [CrossRef]
- Lee, J.Y.; Han, B.M. A bidirectional wireless power transfer EV charger using self-resonant PWM. IEEE Trans. Power Electron. 2014, 30, 1784–1787. [Google Scholar] [CrossRef]
- Wolfspeed. 6.6 kw High Power Density Bi-Directional EV on-Board Charger; Cree Power Applications; Wolfspeed: Durham, CA, USA, 2020. [Google Scholar]
- Bai, K. Applying Wide-Bandgap Devices to EV Battery Chargers. 2019. Available online: https://docplayer.net/164256141-Applying-wide-bandgap-devices-to-ev-battery-chargers.html (accessed on 13 November 2022).
- Li, H.; Bai, L.; Zhang, Z.; Wang, S.; Tang, J.; Ren, X.; Li, J. A.6.6 kW SiC bidirectional on-board charger. In Proceedings of the 2018 IEEE Applied Power Electronics Conference and Exposition (APEC 2018), San Antonio, TX, USA, 4–8 March 2018; pp. 1171–1178.
- Lai, J.S.; Zhang, L.; Zahid, Z.; Tseng, N.H.; Lee, C.S.; Lin, C.H. A high-efficiency 3.3-kW bidirectional on-board charger. In Proceedings of the 2015 IEEE 2nd International Future Energy Electronics Conference (IFEEC 2015), Taipei, Taiwan, 1–4 November 2015; pp. 1–5. [Google Scholar]
- Li, H.; Wang, S.; Zhang, Z.; Tang, J.; Ren, X.; Chen, Q. A SiC bidirectional LLC on-board charger. In Proceedings of the 2019 IEEE Applied Power Electronics Conference and Exposition (APEC 2019), Anaheim, CA, USA, 17–21 March 2019; pp. 3353–3360. [Google Scholar]
- Anderson, W.M.; Cambier, C.S. Integrated electric vehicle drive. SAE Spec. Publ. 1991, 862, 63–68. [Google Scholar]
- Chan, C.C. An overview of electric vehicle technology. Proc. IEEE 1993, 81, 1202–1213. [Google Scholar] [CrossRef]
- Lee, Y.J.; Khaligh, A.; Emadi, A. Advanced integrated bidirectional AC/DC and DC/DC converter for plug-in hybrid electric vehicles. IEEE Trans. Veh. Technol. 2009, 58, 3970–3980. [Google Scholar]
- Falvo, M.C.; Sbordone, D.; Bayram, I.S.; Devetsikiotis, M. EV charging stations and modes: International standards. In Proceedings of the 2014 International Symposium on Power Electronics, Electrical Drives, Automation and Motion, Ischia, Italy, 18–20 June 2014; pp. 1134–1139. [Google Scholar]
- Foley, A.M.; Winning, I.J.; Gallachóir, B.P.Ó. State-of-the-art in electric vehicle charging infrastructure. In Proceedings of the 2010 IEEE Vehicle Power and Propulsion Conference, Lille, France, 1–3 September 2010; pp. 1–6. [Google Scholar]
- Lu, M.H.; Jen, M.U. Safety design of electric vehicle charging equipment. World Electr. Veh. J. 2012, 5, 1017–1024. [Google Scholar] [CrossRef] [Green Version]
- International Electrotechnical Commission (IEC). IEC 60990:2016 RLV. In Methods of Measurement of Touch Current and Protective Conductor Current, 3rd ed.; International Electrotechnical Commission (IEC): Geneva, Switzerland, 2016; Available online: https://webstore.iec.ch/publication/24974 (accessed on 18 September 2022).
- Zhang, Y.; Perdikakis, W.; Cong, Y.; Li, X.; Elshaer, M.; Abdullah, Y.; Chen, C. Leakage current mitigation of non-isolated integrated chargers for electric vehicles. In Proceedings of the 2019 IEEE Energy Conversion Congress and Exposition (ECCE 2019), Baltimore, MD, USA, 29 September–3 October 2019; pp. 1195–1201. [Google Scholar]
- ISO 20200:2004; International Standard 61010-1 © Iec2001. ISO: Geneva, Switzerland, 2003.
- Hyundai Reveals IONIQ 5 EV for North America—Green Car Congress. Available online: https://www.greencarcongress.com/2021/05/20210525-ioniq5.html (accessed on 22 September 2022).
- Song, H.S.; Jang, K.Y. System for Recharging Plug-In Hybrid Vehicle by Controlling Pre-Charge of a DC link. U.S. Patent US8872473B2, 2010. [Google Scholar]
- Burress, T. Benchmarking Competitive Technologies, presentation at the 2013 and 2014 U.S. Department of Energy Hydrogen and Fuel Cells Program and Vehicle Technologies Program Annual Merit Review and Peer Evaluation Meeting, Washington D.C., June 2013 and 2015. Available online: https://www.energy.gov/sites/default/files/2014/03/f10/ape006_burress_2012_p.pdf (accessed on 13 November 2022).
- 2021 Nissan Leaf S Hatchback Features and Specs. Available online: https://www.caranddriver.com/nissan/leaf/specs/2021/nissan_leaf_nissan-leaf_2021 (accessed on 22 September 2022).
- Finnegworth, R.; Busey, C.; Lowald, K. Device for Charging a Battery of an Electrically Driven Motor Vehicle—CN111169300A. 2018. Available online: https://patents.google.com/patent/CN111169300A/en?oq=CN111169300A (accessed on 13 November 2022).
- 2021 Volkswagen ID 4 Pro S review: A Good EV Let Down by the Details. Available online: https://www.cnet.com/roadshow/reviews/2021-volkswagen-id-4-pro-s-rwd-review/ (accessed on 22 September 2022).
- BMWM. Information, Specifications; BMW X3. X3 xDrive30e; BMW: Munich, Germany, 2019; pp. 1–2. [Google Scholar]
- Weber, R.; Herzog, T. Charging Device for an Electric Energy Storage in a Motor Vehicle. European Patent Office EP2670624B1, 11 December 2013. [Google Scholar]
- Audi e-Tron Sportback 50 Quattro Specs. Available online: https://www.ultimatespecs.com/car-specs/Audi/119216/2021-Audi-e-tron-Sportback-50-quattro.html (accessed on 22 September 2022).
- Ruppert, D. Charging Device for a Motor Vehicle. German Patent Office DE102018203263A1, 6 March 2018. [Google Scholar]
- 2020 Renault Zoe-Specifications. Available online: https://www.evspecifications.com/en/model/d323ad (accessed on 22 September 2022).
- Hegazy, O.; Van Mierlo, J.; Lataire, P. Control and analysis of an integrated bidirectional DC/AC and DC/DC converters for plug-in hybrid electric vehicle applications. J. Power Electron. 2011, 11, 408–417. [Google Scholar] [CrossRef] [Green Version]
- Car Review-Mercedes-Benz EQA 250. Available online: https://www.leaseplan.com/en-be/get-inspired/car-review/mercedes-eqa-2021-review/ (accessed on 22 September 2022).
- Boehme, U.; Candir, A.; Haspel, A. On-Board Charger and Method for Charging a High-Voltage Battery of a High-Voltage on-Board Power Supply or a Low-Voltage Battery of a Low-Voltage On-Board Power Supply. Chinese Patent Office CN113874244A, 2019. [Google Scholar]
- Tesla Model Y Long Range Dual Motor. Available online: https://ev-database.org/car/1182/Tesla-Model-Y-Long-Range-Dual-Motor (accessed on 22 September 2022).
- Krauer, J.P. Bidirectional Polyphase Multimode Converter Including Boost and Buck Boost Mode. U.S. Patent US8638069B2, 2014. [Google Scholar]
- The Charging Process: Quick, Comfortable, Intelligent and Universal. Available online: https://newsroom.porsche.com/en/products/taycan/charging-18558.html (accessed on 22 September 2022).
- Gotz, S.; Reber, V. Modular Power Electronics Unit for Charging an Electrically Powered Vehicle. European Patent Office EP3333005B1, 2017. [Google Scholar]
- BAIC EC 180. Available online: https://wattev2buy.com/electric-vehicles/baic/baic-ec180-ev/ (accessed on 23 September 2022).
- Wang, H.; Yun, P.; Gao, Q.; Li, M. A Kind of Power-Driven System and Vehicle. Chinese Patent Office CN205818957U, 2016. [Google Scholar]
- Shi, C.; Khaligh, A. A two-stage three-phase integrated charger for electric vehicles with dual cascaded control strategy. IEEE J. Emerg. Sel. Top. Power Electron. 2018, 6, 898–909. [Google Scholar] [CrossRef]
- Shi, C.; Tang, Y.; Khaligh, A. A single-phase integrated onboard battery charger using propulsion system for plug-in electric vehicles. IEEE Trans. Veh. Technol. 2017, 66, 10899–10910. [Google Scholar] [CrossRef]
- Liu, T.H.; Chen, Y.; Yi, P.H.; Chen, J.L. Integrated battery charger with power factor correction for electric-propulsion systems. IET Electr. Power Appl. 2015, 9, 229–238. [Google Scholar] [CrossRef]
- Diab, M.S.; Elserougi, A.A.; Abdel-Khalik, A.S.; Massoud, A.M.; Ahmed, S. A nine-switch-converter-based integrated motor drive and battery charger system for EVs using symmetrical six-phase machines. IEEE Trans. Ind. Electron. 2016, 63, 5326–5335. [Google Scholar] [CrossRef]
- Lacroix, S.; Labouré, E.; Hilairet, M. An integrated fast battery charger for electric vehicle. In Proceedings of the 2010 IEEE Vehicle Power and Propulsion Conference (VPPC 2010); Lille, France, 1–3 September 2010; pp. 1–6. [Google Scholar]
- Subotic, I.; Bodo, N.; Levi, E. An EV drive-train with integrated fast charging capability. IEEE Trans. Power Electron. 2015, 31, 1461–1471. [Google Scholar] [CrossRef] [Green Version]
- Ali, S.Q.; Mascarella, D.; Joos, G.; Coulombe, T.; Cyr, J.M. Three phase high power integrated battery charger for plugin electric vehicles. In Proceedings of the 2015 IEEE Vehicle Power and Propulsion Conference (VPPC 2015), Montreal, QC, Canada, 19–22 October 2015; pp. 1–6. [Google Scholar]
- Lu, X.; Iyer, K.L.V.; Mukherjee, K.; Kar, N.C. Investigation of integrated charging and discharging incorporating interior permanent magnet machine with damper bars for electric vehicles. IEEE Trans. Energy Convers. 2015, 31, 260–269. [Google Scholar] [CrossRef]
- Loudot, S.; Briane, B.; Ploix, O.; Villeneuve, A. Fast Charging Device for an Electric Vehicle. U.S. Patent US2012/0286740 A1, 2013. [Google Scholar]
- Meher, S.R.; Banerjee, S.; Vankayalapati, B.T.; Singh, R.K. A reconfigurable on-board power converter for electric vehicle with reduced switch count. IEEE Trans. Veh. Technol. 2020, 69, 3760–3772. [Google Scholar] [CrossRef]
- Sul, S.K.; Lee, S.J. An integral battery charger for four-wheel drive electric vehicle. IEEE Trans. Ind. Appl. 1995, 31, 1096–1099. [Google Scholar] [CrossRef]
- Pellegrino, G.; Armando, E.; Guglielmi, P. An integral battery charger with power factor correction for electric scooter. IEEE Trans. Power Electron. 2009, 25, 751–759. [Google Scholar] [CrossRef] [Green Version]
- Chang, H.C.; Liaw, C.M. An integrated driving/charging switched reluctance motor drive using three-phase power module. IEEE Trans. Ind. Electron. 2010, 58, 1763–1775. [Google Scholar] [CrossRef]
- Na, T.; Yuan, X.; Tang, J.; Zhang, Q. A review of on-board integrated electric vehicles charger and a new single-phase integrated charger. CPSS Trans. Power Electron. Appl. 2019, 4, 288–298. [Google Scholar] [CrossRef]
- Haghbin, S.; Guillen, I.S. Integrated motor drive and non-isolated battery charger based on the torque cancelation in the motor. In Proceedings of the 2013 IEEE 10th International Conference on Power Electronics and Drive Systems (PEDS 2013), Kitakyushu, Japan, 22–25 April 2013; pp. 824–829. [Google Scholar]
- Viana, C.; Lehn, P.W. A drivetrain integrated DC fast charger with buck and boost functionality and simultaneous drive/charge capability. IEEE Trans. Transp. Electrif. 2019, 5, 903–911. [Google Scholar] [CrossRef]
- Viana, C.; Pathmanathan, M.; Lehn, P.W. Dual Inverter Integrated Three-Phase EV Charger Based on Split-Phase Machine. IEEE Trans. Power Electron. 2022, 37, 15175–15185. [Google Scholar] [CrossRef]
- Cocconi, A.G. Combined Motor Drive and Battery Recharge System. U.S. Patent 5,341,075, 23 August 1994. [Google Scholar]
- Serge, L.; Briane, B.; Ploix, O. Electric Motor Assembly Rechargeable from an Electrical Mains System, and Dedicated Connection Housing. U.S. Patent 9,035,608, 19 May 2015. [Google Scholar]
- Zhang, Y.; Yang, G.; He, X.; Elshaer, M.; Perdikakis, W.; Li, H.; Chen, C. Leakage current issue of non-isolated integrated chargers for electric vehicles. In Proceedings of the 2018 IEEE Energy Conversion Congress and Exposition (ECCE 2018), Portland, OR, USA, 23–27 September 2018; pp. 1221–1227. [Google Scholar]
- Krauer, J.P.; Kalayjian, N. Leakage Current Reduction in Combined Motor Drive Energy Storage Recharge System. U.S. Patent US20120019194A1, 14 August 2012. [Google Scholar]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Charger Type | Charger Location | Voltage Level | Power Level | Approx. Charging Time (40kWh Battery Capacity) | Charger Outlet Connector | |
|---|---|---|---|---|---|---|
| Europe/UK | USA | |||||
| Level 1 | On-board 1 Phase | 120 V ac | 1.4 kW (12 A) 1.9 kW (20 A) | 11–36 h 4–11 h | SAEJ1772 T1 | SAEJ1772 T1 |
| Level 2 | On-board 1 Phase/3 Phase | 220 V ac/400 Vac | 4kW (17 A) 8 kW (32 A) 19. 2 kW (80 A) | 2–6 h 1–4 h 2–3 h | IEC62196 T2 | SAEJ1772 T1 |
| Level 3 | Off-board | 480 V ac (US) 400 V ac (EU)/ 200-600 V dc | 50 kW100 kW | 0.4–1 h 0.2–0.5 h | IEC 62196 T2/ CCS Combo 2 | SAE J3068 CCS/Combo 1 |
| Standard Code | Description |
|---|---|
| Society for Automobile Engineers (SAE) | |
| J1772 | Conductive charging standard. Defines the four main types of charging: AC level 1, AC level 2, DC level 1, and DC level 2 |
| J1773 | Inductive charging standards combined with the level defined in the SAE J1772. |
| J2293 | All the protocols to be followed for transferring the energy from the utility to the EV battery system for the electric vehicle supple equipment (EVSE) |
| J2894 | This document essentially deals with laying down the power quality requirements for off-board or on-board chargers while interacting with the utility grid. According to it, the grid current total harmonic distortion (THD) should be less than 10%. |
| J2836/2847/2931 | This document is predominantly for off-board fast DC chargers which use the J1772 coupler. It lays out the foundation and communication standards via the SAE J1772 pilot line. |
| J2929 | This document defines the standards for battery propulsion systems. |
| J2910 | Primarily details the safety standards for heavy electric vehicles, such as electric trucks and buses. |
| J2344 | This document defines the safety standards of the electric vehicles. |
| J2464 | This is regarding the safety standards of the Rechargeable Energy Storage System (RESS). |
| National Fire Protection Association (NFPA) | |
| NFPA 70 | Safety standards for the individuals who work near exposed energized electrical systems. |
| NFPA 70 E | Deals with the safety standards for the individuals. |
| NFPA 70 B | Deals with the design standards for electrical equipment in order to ensure their safe operation. |
| NEC 625/626 | This document defines the standards and the requirements for electric vehicle charging and supply equipment. |
| Institute for Electrical and Electronics Engineers (IEEE) | |
| IEEE 519-2014 | This document defines the power quality standards for any interaction with the utility grid. The THD specified for the grid current is less than 8% for low and medium voltage. |
| IEEE P2030 | Standards for the interoperability of smart grid and charging stations. |
| IEEE 2030.1.1 | This document specifies the design standards for the DC fast charger and also specifies the communication standards for the controlling signals between the charging infrastructure and the CHAdeMO coupler interface. |
| IEEE 1901 | This document deals with the data rate for the overnight charging of the vehicles. |
| IEEE P2690 | These standards set the charging network management along with the vehicle authorization. |
| IEEE 1547 | These standards are essentially for any interaction between the grid and any distributed energy source. |
| IEEE P1809 | This document standardises the sustainable operation of the electric vehicle. |
| International Electrotechnical Commission (IEC) | |
| IEC TC 64 | Standards for practicing safe practice with any electrical installation and electric shock protection. |
| IEC TC 69 | This document specifies the standards to be followed for the safe operation of any charging infrastructure. |
| IEC 1000-3-6 | This document defines the power quality standards for the interaction with the utility grid. According to it, the THD in the grid current should be less than 8% for medium and low voltages. |
| IEC TC 21 | This document deals with the battery management system. |
| International Organization of Standardizations (ISO) | |
| ISO 15118-1 & 2 | These are the standards for the road vehicles for communication between the grid and the EVSE. |
| ISO 6469 | Standards for the safety of the Battery Management System |
| ISO 6469-1:2009 | Safety specifications for the RESS |
| ISO 6469-2:2009 | Safety specifications for electric vehicle operation and failure protection |
| ISO 6469-3:2009 | Safety specification for individuals against electric shock and hazard |
| Underwriters Laboratory (UL) | |
| UL 2594/2251/2201/2231 | This document standardises the safety requirements for the EV OBC system, especially for the components operating at or lower than 600 V. |
| UL 225a | Safety requirement for the design of electric couplers, plugs and receptacles. |
| UL 1741 | Standards for the any converter, inverter, or distributed energy system interacting with each other or with the grid. V2X communication. |
| Verband Deutscher Elektrotechniker (VDE) | |
| DIN V VDE 0510-11 | Safety requirements for secondary battery installations and management systems. |
| DIN VDE 0126-1-1 | Safety standards for the common mode leakage current between the utility grid and any other connected electrical system. |
| Vehicle | Ref. No. | Year | Charger Type | OBC Specifications | Battery Capacity (kWh) | Max. Charging Power (kW) | Charging Time |
|---|---|---|---|---|---|---|---|
| Hyundai Ioniq 5 | [48,49] | 2021 |
| Non-Isolated, Bidirectional | 73 |
|
|
| Nissan Leaf | [50,51] | 2021 |
| Isolated, Unidirectional | 40 |
|
|
| Volkswagen ID4 | [52,53] | 2021 |
| Isolated | 82 |
|
|
| BMW X3 | [54,55] | 2021 |
| Non-Isolated | 43 |
|
|
| Audi e-Tron | [56,57] | 2021 |
| Isolated, Unidirectional | 71 |
|
|
| Renault Zoe R135 | [58,59] | 2020 |
| Non-isolated, Unidirectional | 55 |
|
|
| Mercedes Benz EQA 250 | [60,61] | 2021 |
| Isolated, Bidirectional | 66 |
|
|
| Tesla Model Y | [62,63] | 2021 |
| Non-isolated, Bidirectional | 75 |
|
|
| Porsche Turbo Taycan | [64,65] | 2021 |
| Non-Isolated, Unidirectional | 93 |
|
|
| BAIC EC180 | [66,67] | 2017 | Separate | Non-Isolated, Unidirectional | 22 | 6.6 | 3.5 h |
| Ref. | Input Power | Charger Struct. | Charger Arch. | AC–DC Stage | DC–DC Stage | Power Flow Cap. | Eff. (%) | Nd * | Ns ** | Pros | Cons |
|---|---|---|---|---|---|---|---|---|---|---|---|
| [67] | 3-Phase | Machine-integrated | 2-Stage | 3-switch buck rectifier | Interleaved boost using machine winding | Unidirectional | 95.3 | 12 | 9 |
|
|
| [68] | 1-Phase | Traction VSI-integrated | 2-Stage | Diode rectifier | Traction VSI acting as buck/boost | Unidirectional | 88.3 | 4 | 6 |
|
|
| [70] | 1-Phase | Machine-integrated | 2-Stage | Diode rectifier | Interleaved boost using machine windings | Unidirectional | 93.1 | 4 | 6 |
|
|
| [69] | 3-Phase | Machine-integrated | 2-Stage | 9-switch converter for 6-phase machine | Bidirectional DC–DC buck/boost converter | Bidirectional | 76.2 | 0 | 11 |
|
|
| [71] | 3-Phase | Machine-integrated | 2-Stage | 3 parallel h-bridges | Bidirectional DC–DC buck/boost converter | Bidirectional | -- | 0 | 14 |
|
|
| [72] | 3-Phase | Machine-integrated | 1-Stage | 5-leg traction VSI for 5-phase machine | -- | Bidirectional | -- | 0 | 10 |
|
|
| [73] | 3-Phase | Machine-integrated | 1-Stage | 3-phase traction VSI acting as rectifier | -- | Bidirectional | 97 | 0 | 6 |
|
|
| [74] | 3-Phase | Machine-integrated | 2-Stage | 3-phase traction VSI acting as rectifier | Bidirectional DC–DC buck/boost converter | Bidirectional | -- | 0 | 8 |
|
|
| [75] | 3-Phase | Machine-integrated | 2-Stage | Current source rectifier | 3-phase VSI acting as boost converter | Unidirectional | -- | 6 | 12 |
|
|
| [48] | 1/3-Phase | Machine-integrated | 2-Stage | 3-phase VSI acting as rectifier | Bidirectional DC–DC buck/boost conv. | Bidirectional | -- | 0 | 14 |
|
|
| [76] | 1-Phase | VSI-integrated | 2-Stage | 8-switch converter | H-bridge acting as interleaved bidirectional DC–DC converter | Bidirectional | -- | 0 | 12 |
|
|
| [59] | 1-Phase | Machine-integrated | 2-Stage | 3-phase VSI acting as rectifier | LLC | Bidirectional | 97.6 | 2 | 6 |
|
|
| [77] | 1-Phase | Machine-integrated | 1-Stage | 3-phase VSI acting as rectifier | -- | Bidirectional | -- | 0 | 24 |
|
|
| [78] | 1-Phase | Machine-integrated | 2-Stage | 3-phase VSI acting as rectifier | Bidirectional DC–DC buck/boost converter | Bidirectional | 87.5 | 0 | 8 |
|
|
| [79] | 1-Phase | Machine-integrated | 2-Stage | Modified miller converter for 4-phase SRM | Bidirectional DC–DC buck/boost converter | Bidirectional | -- | 1 | 12 |
|
|
| [80] | 1-Phase | VSI-integrated | 2-Stage | 3-phase VSI acting as rectifier | Quasi z-source DC–DC converter | Bidirectional | -- | 0 | 7 |
|
|
| [81] | 3-Phase | Machine-integrated | 1-Stage | 3-phase VSI acting as rectifier | -- | Bidirectional | -- | 0 | 6 |
|
|
| [82] | 1-Phase | Machine-integrated | 2-Stage | Diode rectifier (off-board) | 3-phase VSI acting as DC–DC converter | Bidirectional | -- | 4 | 8 |
|
|
| [83] | 3-Phase | Machine-integrated | 1-Stage | 3-phase VSI acting as rectifier | -- | Bidirectional | -- | 0 | 12 |
|
|
| [85] | 3-Phase | Machine-integrated | 1-Stage | 3-phase VSI acting as rectifier | -- | Bidirectional | -- | 0 | 6 |
|
|
| [86] | 1/3-Phase | Machine-integrated | 1-stage | 3-phase VSI acting as rectifier | -- | Bidirectional | -- | 0 | 6 |
|
|
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mustafa, U.; Ahmed, R.; Watson, A.; Wheeler, P.; Ahmed, N.; Dahele, P. A Comprehensive Review of Machine-Integrated Electric Vehicle Chargers. Energies 2023, 16, 129. https://doi.org/10.3390/en16010129
Mustafa U, Ahmed R, Watson A, Wheeler P, Ahmed N, Dahele P. A Comprehensive Review of Machine-Integrated Electric Vehicle Chargers. Energies. 2023; 16(1):129. https://doi.org/10.3390/en16010129
Chicago/Turabian StyleMustafa, Uvais, Rishad Ahmed, Alan Watson, Patrick Wheeler, Naseer Ahmed, and Parmjeet Dahele. 2023. "A Comprehensive Review of Machine-Integrated Electric Vehicle Chargers" Energies 16, no. 1: 129. https://doi.org/10.3390/en16010129