
Cuckoo Search Combined with PID Controller for Maximum Power Extraction of Partially Shaded Photovoltaic System

 ,
,  , , and
, , and
Abstract
:1. Introduction
- Modify and re-establish the mathematical model of PV array under PSCs.
- Outline a unique, simple, and rapid metaheuristic soft computing method called CSA to detect GMPP under various PSCs while the convergence speed and output fluctuations are minimized during the tracking period.
- Utilizing a dynamic global MPPT approach that combines a CSA optimizer with PID control to treat PSCs, with the goal of putting it into a realistic PV system and improving the performance of the conventional CSA.
- Evaluate the proposed CSA-PID that utilized Matlab/Simulink and the Hardware-In-Loop experiment on the MT real-time control platform NI PXIE-1071 and compare it with CSA, MPSO, PSO, and MP&O methods under similar scenarios.
2. Description of the Proposed Photovoltaic Energy System
- When RL is relatively large and the load current IL ≤ Ia, then both cell (a) and cell (b) can work normally and provide the output current. The output voltage and power are the summations of the output voltage and power of each cell.
- When RL is relatively small and the load current IL > Ia, then cell (a) will be short-circuited by the diode Da and will not provide the corresponding current. The output current and power of the array will only be provided by cell (b).
3. Hybrid CSA-PID Technique Based MPPT
3.1. MPPT Based on CSA
- The CSA algorithm is a population-based algorithm (such as GA and PSO), but it shows advantages in the selection process (such as harmonious search).
- The CSA algorithm has higher randomization efficiency because, in Lévy flight, the step size can become larger (long jump) and the convergence speed is faster.
- There are only two parameters for parameter setting in CSA; GA and PSO need three or more parameters.
- Unlike PSO, CSA performance does not depend on sample initialization.
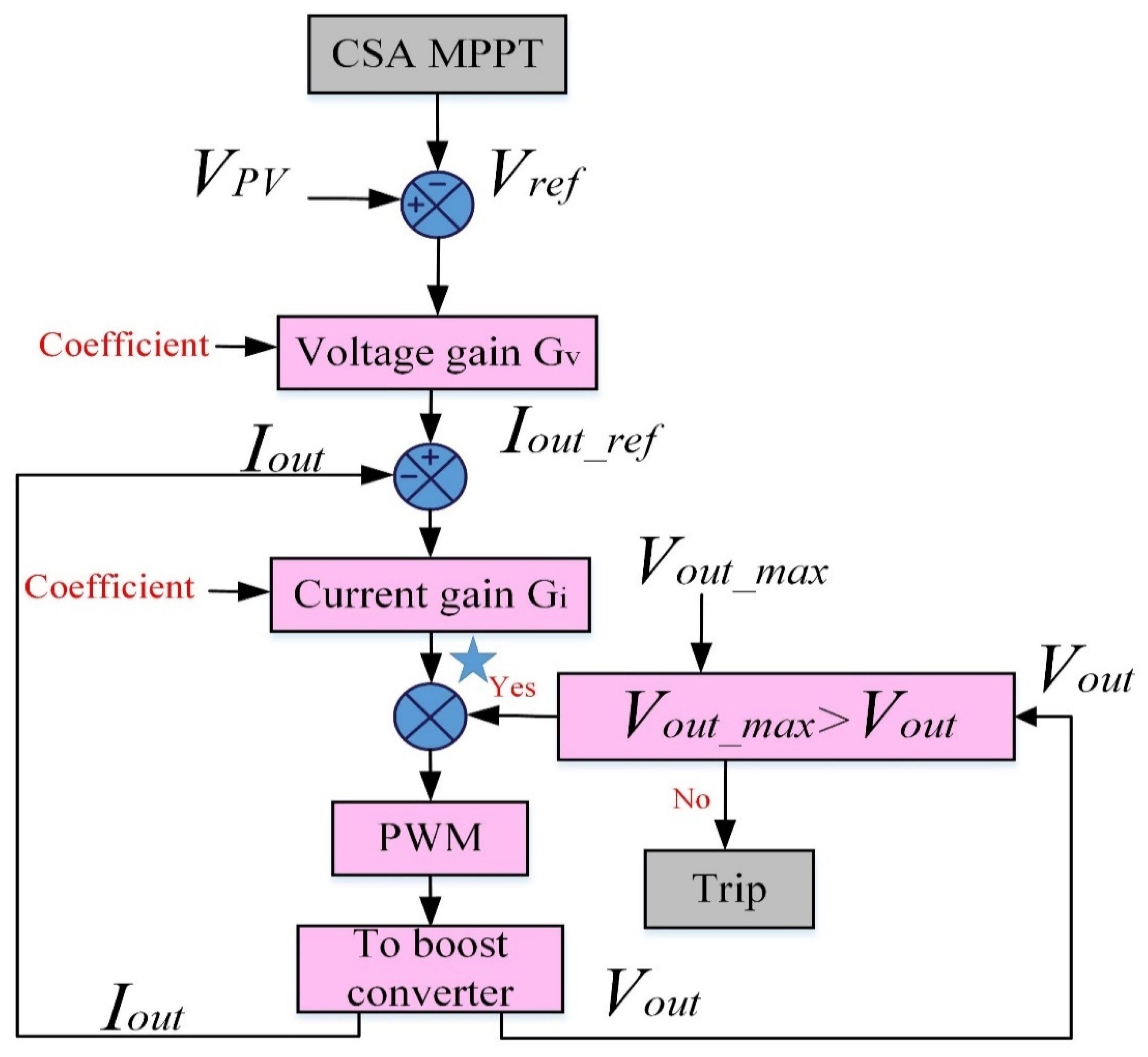
3.2. PID Control Method Based on MPPT
3.3. Hybrid CSA and PID
4. Simulation and Experimental Results
4.1. Simulation Results and Discussions
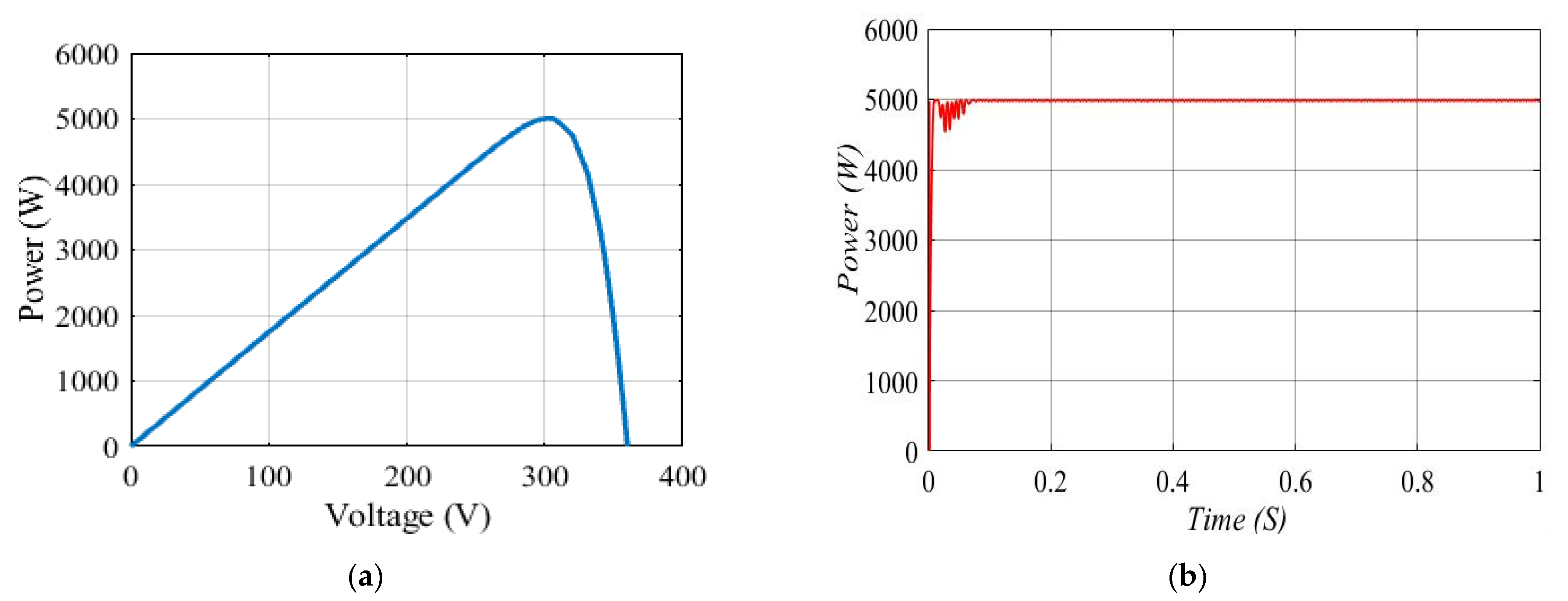
4.1.1. Test the Proposed CSA-PID under Standard Test Conditions (STC) and PSCs
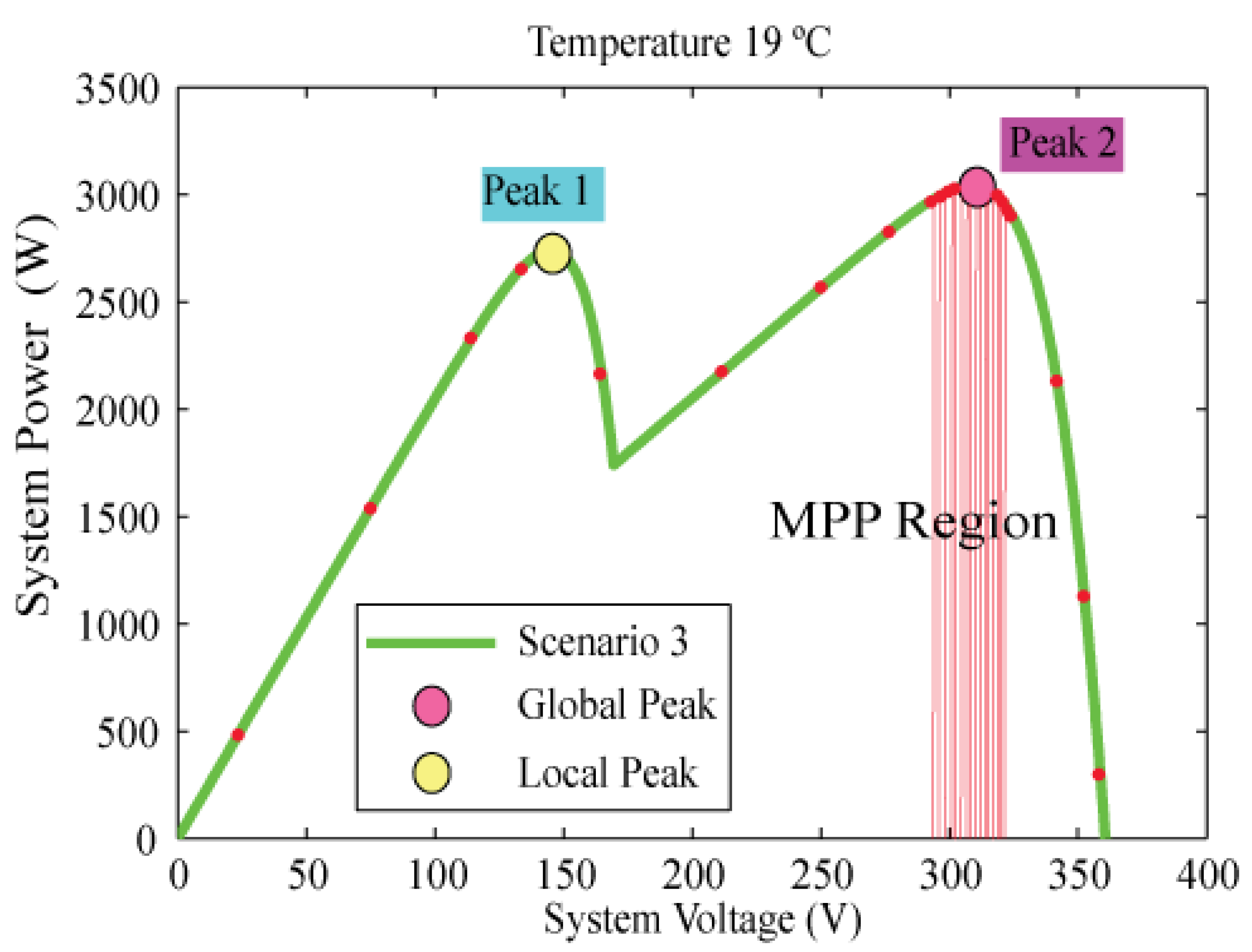
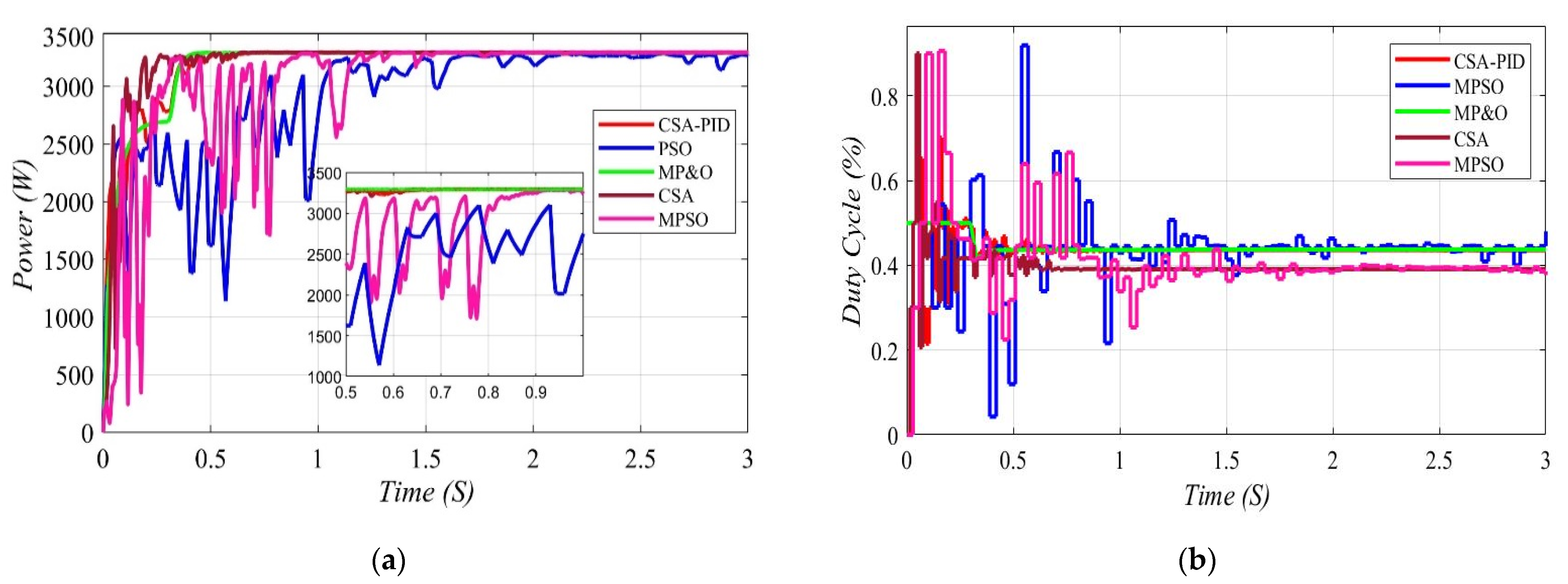
4.1.2. Partial Shading Distribution Scenarios of PV System
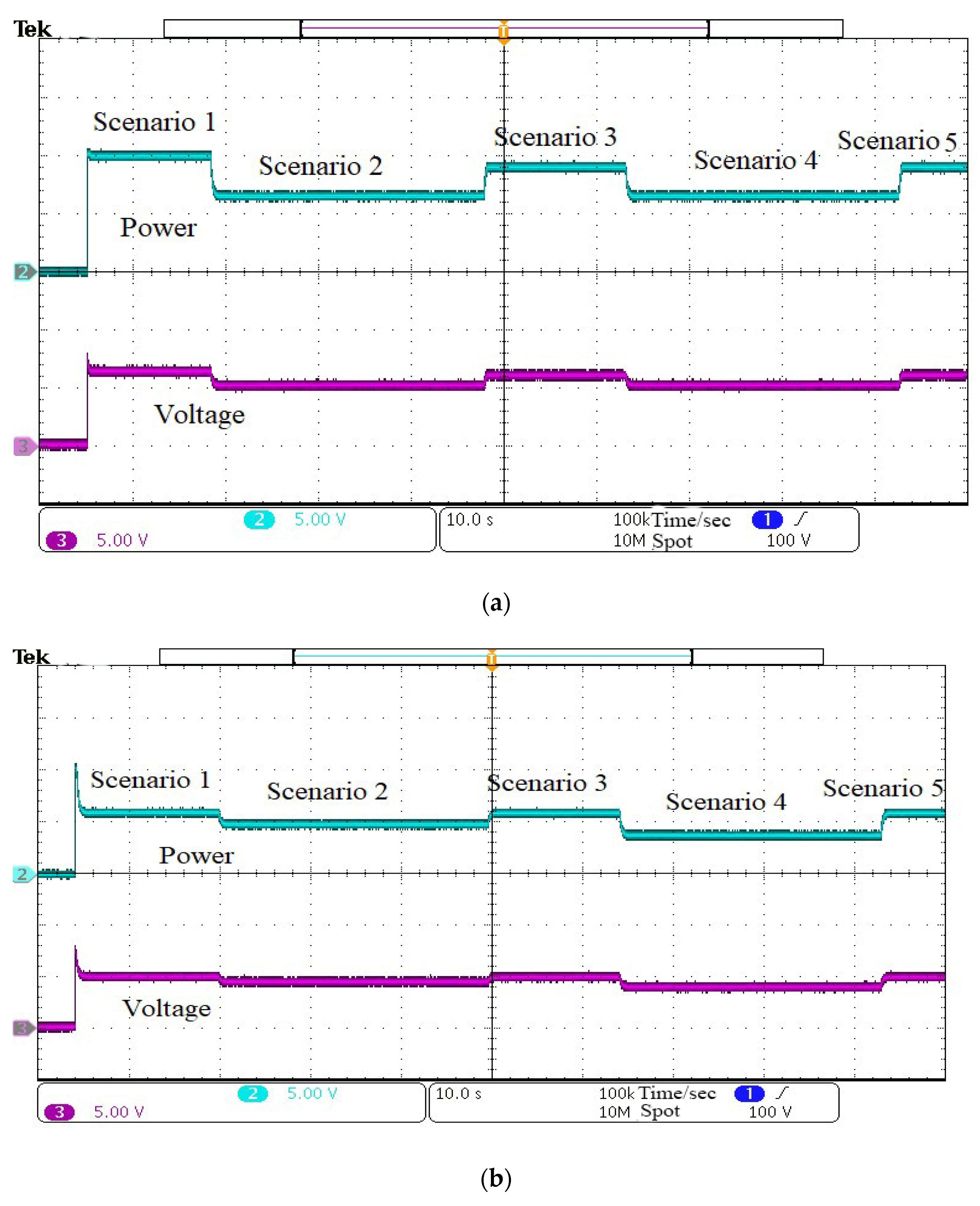
4.2. Hardware-in-the-Loop Experimental Results and Discussions
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Council, G.W.E. Global Wind Statistics, 2017. Available online: https://gwec.net/wp-content/uploads/vip/GWEC_PRstats2017_EN-003_FINAL.pdf (accessed on 22 February 2022).
- Fekkak, B.; Menaa, M.; Boussahoua, B. Control oftransformerless grid-connected PV system using average models of power electronics converters with MATLAB/Simulink. Sol. Energy 2018, 173, 804–813. [Google Scholar] [CrossRef]
- Yaragatti, U.R.; Naik, A.; Shreesha, B.C. A novel method of fuzzy controlled maximum power point tracking in photovoltaic systems. In Proceedings of the 2005 IEEE International Conference on Industrial Technology, Hong Kong, China, 14–17 December 2005; pp. 1421–1426. [Google Scholar]
- Huang, Y.; Chen, X.; Ye, C. Research Article A Hybrid Maximum Power Point Tracking Approach for Photovoltaic Systems under Partial Shading Conditions Using a Modified Genetic Algorithm and the Firefly Algorithm. Int. J. Photoenergy 2018, 2018, 7598653. [Google Scholar] [CrossRef] [Green Version]
- Banu, I.V.; Beniug, R.Ă.; Istrate, M. Comparative Analysis of the Perturb-and-Observe and Incremental Conductance MPPT Methods. In Proceedings of the 2013 8th International Symposium on Advanced Topics in Electrical Engineering (ATEE), Bucharest, Romania, 23–25 May 2013; pp. 23–26. [Google Scholar]
- Hart, G.W.; Branz, H.M.; Cox, C.H. Experimental tests of open loop maximum-power-point tracking techniques. Sol. Cells 1984, 13, 185–195. [Google Scholar] [CrossRef]
- Belkaid, A.; Colak, I.; Kayisli, K. Implementation of a modifed P&O-MPPT algorithm adapted for varying solar radiation conditions. Electr. Eng. 2017, 99, 839–846. [Google Scholar]
- Safari, A.; Mekhilef, S. Simulation and hardware implementation of incremental conductance MPPT with direct control method using cuk converter. IEEE Trans. Ind. Electron. 2011, 58, 1154–1161. [Google Scholar] [CrossRef]
- Nabipour, M.; Razaz, M.; Seifossadat, S.G.; Mortazavi, S.S. A new MPPT scheme based on a novel fuzzy approach. Renew. Sustain. Energy Rev. 2017, 74, 1147–1169. [Google Scholar] [CrossRef]
- Ibrahim, A.W.; Ding, M.; Jin, X.; Dai, X.; Sarhan, M.A.; Shafik, M.B.; Zhou, H. Artificial neural network based maximum power point tracking for PV system. In Proceedings of the 2019 Chinese Control Conference (CCC), Guangzhou, China, 27–30 July 2019; pp. 6559–6564. [Google Scholar]
- Chaouachi, A.; Kamel, R.M.; Nagasaka, K. A novel multi-model neuro-fuzzy-based MPPT for three-phase grid-connected photovoltaic system. Sol. Energy 2010, 84, 2219–2229. [Google Scholar] [CrossRef]
- Al-Wesabi, I.; Fang, Z.; Wei, Z.; Dong, H. Direct Sliding Mode Control for Dynamic Instabilities in DC-Link Voltage of Standalone Photovoltaic Systems with a Small Capacitor. Electronics 2022, 11, 133. [Google Scholar] [CrossRef]
- Pradhan, R.; Subudhi, B. Double integral sliding mode MPPT control of a photovoltaic system. IEEE Trans. Control Syst. Technol. 2016, 24, 285–292. [Google Scholar] [CrossRef]
- De Brito, M.A.G.; Galotto, L.; Sampaio, L.P.; e Melo, G.A.; Canesin, C.A. Evaluation of the main MPPT techniques for photovoltaic applications. IEEE Trans. Ind. Electron. 2013, 60, 1156–1167. [Google Scholar] [CrossRef]
- Kollimalla, S.K.; Mishra, M.K. A novel adaptive P&O MPPT algorithm considering sudden changes in the irradiance. IEEE Trans. Energy Convers. 2014, 29, 602–610. [Google Scholar]
- Kakosimos, P.E.; Kladas, A.G. Implementation of photovoltaic array MPPT through fixed step predictive control technique. Renew Energy 2011, 36, 2508–2514. [Google Scholar] [CrossRef]
- Talbi, B.; Krim, F.; Rekioua, T.; Laib, A.; Feroura, H. Design and hardware validation of modifed P&O algorithm by fuzzy logic approach based on model predictive control for MPPT of PV systems. J. Renew Sustain. Energy 2017, 9, 043503. [Google Scholar]
- Kakosimos, P.E.; Kladas, A.G.; Manias, S.N. Fast photovoltaic system voltage-or current-oriented MPPT employing a predictive digital current-controlled converter. IEEE Trans. Ind. Electron. 2013, 60, 5673–5685. [Google Scholar] [CrossRef]
- Talbi, B.; Krim, F.; Rekioua, T.; Mekhilef, S.; Laib, A.; Belaout, A. A high-performance control scheme for photovoltaic pumping system under sudden irradiance and load changes. Sol. Energy 2018, 159, 353–368. [Google Scholar] [CrossRef]
- Laib, A.; Krim, F.; Talbi, B.; Sahli, A. A predictive control scheme for large-scale grid-connected PV system using high-level NPC inverter. Arab. J. Sci. Eng. 2020, 45, 1685–1701. [Google Scholar] [CrossRef]
- Bianconi, E.; Calvente, J.; Giral, R.; Mamarelis, E.; Petrone, G.; Ramos-Paja, C.A.; Spagnuolo, G.; Vitelli, M. A fast current based MPPT technique employing sliding mode control. IEEE Trans. Ind. Electron. 2013, 60, 1168–1178. [Google Scholar] [CrossRef]
- Mathi, D.K.; Chinthamalla, R. A hybrid global maximum power point tracking of partially shaded PV system under load variation by using adaptive salp swarm and differential evolution–perturb & observe technique. Energy Sources Part A Recovery Util. Environ. Eff. 2020, 43, 2471–2495. [Google Scholar]
- Mathi, D.K.; Chinthamalla, R. Global maximum power point tracking technique based on adaptive salp swarm algorithm and P&O techniques for a PV string under partially shaded conditions. Energy Sources Part A Recovery Util. Environ. Eff. 2020, 1–18. [Google Scholar] [CrossRef]
- Mathi, D.K.; Chinthamalla, R. A hybrid global maximum power point tracking method based on butterfly particle swarm optimization and perturb and observe algorithms for a photovoltaic system under partially shaded conditions. Int. Trans. Electr. Energy Syst. 2020, 30, e12543. [Google Scholar] [CrossRef]
- Liu, L.; Liu, C.; Wang, J.; Kong, Y. Simulation and hardware implementation of a hill-climbing modified fuzzy-logic for maximum power point tracking with direct control method using boost converter. J. Vib. Control 2015, 21, 335–342. [Google Scholar] [CrossRef]
- Liu, L. A Novel Combined Particle Swarm Optimization and Genetic Algorithm MPPT Control Method for Multiple Photovoltaic Arrays at Partial Shading. J. Energy Resour. Technol. 2013, 135, 012002. [Google Scholar] [CrossRef]
- Liu, L.; Liu, C.; Gao, H. A novel improved particle swarm optimization maximum power point tracking control method for photovoltaic array by using current calculated predicted arithmetic under partially shaded conditions. J. Renew. Sustain. Energy 2013, 5, 063139. [Google Scholar] [CrossRef]
- Ibrahim, A.W.; Shafik, M.B.; Ding, M.; Sarhan, M.A.; Fang, Z.; Alareqi, A.G.; Al-Rassas, A.M. PV maximum power-point tracking using modified particle swarm optimization under partial shading conditions. Chin. J. Electr. Eng. 2020, 6, 106–121. [Google Scholar] [CrossRef]
- Eltamaly, A.M.; Farh, H.M.; Abokhalil, A.G. A novel PSO strategy for improving dynamic change partial shading photovoltaic maximum power point tracker. Energy Sources Part A Recovery Util. Environ. Eff. 2020, 1–15. [Google Scholar] [CrossRef]
- Farh, H.M.; Eltamaly, A.M.; Ibrahim, A.B.; Othman, M.F.; Al–Saud, M.S. Dynamic global power extraction from partially shaded photovoltaic using deep recurrent neural network and improved PSO techniques. Int. Trans. Electr. Energy Syst. 2019, 29, e12061. [Google Scholar] [CrossRef]
- Sameh, M.A.; Badr, M.A.; Marei, M.I.; Attia, M.A. Enhancing the performance of photovoltaic systems under partial shading conditions using cuttlefish algorithm. In Proceedings of the 2019 8th International Conference on Renewable Energy Research and Applications (ICRERA), Brasov, Romania, 3–6 November 2019; pp. 874–885. [Google Scholar]
- Ahmed, J.; Salam, Z. A Maximum Power Point Tracking (MPPT) for PV system using Cuckoo Search with partial shading capability. Appl. Energy 2014, 119, 118–130. [Google Scholar] [CrossRef]
- Ljouad, T.; Amine, A.; Rziza, M. Author’s Accepted Manuscript A Hybrid Mobile Object Tracker Based on the Modified. Pattern Recognit. 2014, 47, 3597–3613. [Google Scholar] [CrossRef]
- Shlesinger, M.F.; Klafter, J. Lévy Walks Versus Lévy Flights; Springer: Dordrecht, The Netherlands, 1986. [Google Scholar]
- Yang, X.; Deb, S. Engineering Optimisation by Cuckoo Search. Int. J. Math. Model. Numer. Optim. 2010, 1, 330–343. [Google Scholar] [CrossRef]
- Yang, X.; Deb, S. Computers & Operations Research Multiobjective cuckoo search for design optimization. Comput. Oper. Res. 2013, 40, 1616–1624. [Google Scholar]
- Mantegna, R. Fast accurate algorithm for numerical simulation of levy stable stochastic processes. Phys. Rev. 1994, 49, 4677–4683. [Google Scholar] [CrossRef] [PubMed]
- Shi, J.-Y.; Xue, F.; Qin, Z.-J.; Zhang, W.; Ling, L.-T.; Yang, T. Improved Global Maximum Power Point Tracking for Photovoltaic System via Cuckoo Search under Partial Shaded Conditions. J. Power Electron. 2016, 16, 287–296. [Google Scholar] [CrossRef] [Green Version]
- Enany, M.A. Cuckoo search–based maximum power point tracking controller for PV water pumping system. J. Renew. Sustain. Energy 2017, 9, 063501. [Google Scholar] [CrossRef]
- Ibrahim, A.L.W.; Fang, Z.; Ameur, K.; Min, D.; Shafik, M.B.; Al-Muthanna, G. Comparative Study of Solar PV System Performance under Partial Shaded Condition Utilizing Different Control Approaches. Indian J. Sci. Technol. 2021, 14, 1864–1893. [Google Scholar] [CrossRef]
- Kalaam, R.N.; Muyeen, S.; Al-Durra, A.; Hasanien, H.M.; Al-Wahedi, K. Optimisation of controller parameters for grid-tied photovoltaic system at faulty network using artificial neural network-based cuckoo search algorithm. IET Renew. Power Gener. 2017, 11, 1517–1526. [Google Scholar] [CrossRef]
- Nugraha, D.A.; Lian, K.-L. A novel MPPT method based on cuckoo search algorithm and golden section search algorithm for partially shaded PV system. Can. J. Electr. Comput. Eng. 2019, 42, 173–182. [Google Scholar] [CrossRef]
- Alturki, F.A.; Al-Shamma’a, A.A.; Farh, H.M.H. Simulations and dSPACE Real-Time Implementation of Photovoltaic Global Maximum Power Extraction under Partial Shading. Sustainability 2020, 12, 3652. [Google Scholar] [CrossRef]
- Seyedmahmoudian, M.; Mekhilef, S.; Rahmani, R.; Yusof, R.; Renani, E.T. Analytical Modeling of Partially Shaded Photovoltaic Systems. Energies 2013, 6, 128–144. [Google Scholar] [CrossRef] [Green Version]
- Tahir, M.F.; Cheema, K.M.; Elavarasan, R.M. A Novel Algorithm for MPPT of an Isolated PV System Using Push Pull Converter with Fuzzy. Energies 2020, 13, 4007. [Google Scholar]
- Rajabioun, R. Cuckoo Optimization Algorithm. Appl. Soft Comput. J. 2011, 11, 5508–5518. [Google Scholar] [CrossRef]
- Yang, X.S.; Deb, S. Cuckoo search via Lévy flights. In Proceedings of the World Congress on Nature & Biologically Inspired Computing (NaBIC), Coimbatore, India, 9–11 December 2009; pp. 210–214. [Google Scholar]
- Miyatake, M. Maximum Power Point Tracking of Multiple Photovoltaic Arrays: A PSO Approach. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 367–380. [Google Scholar] [CrossRef]
- Liu, Y.; Huang, S.; Huang, J.; Liang, W. A Particle Swarm Optimization-Based Maximum Power Point Tracking Algorithm for PV Systems. IEEE Trans. Aerosp. Electron. Syst. 2012, 27, 1027–1035. [Google Scholar]
- Seyedmahmoudian, M.; Rahmani, R. Simulation and Hardware Implementation of New Maximum Power Point Tracking Technique for Partially Shaded PV System Using Hybrid DEPSO Method. IEEE Trans. Sustain. Energy 2015, 6, 850–862. [Google Scholar] [CrossRef]
- Kumar, N.; Ieee, M.; Hussain, I.; Singh, B.; Ieee, F. Rapid MPPT for Uniformly and Partial Shaded PV System by using JayaDE Algorithm in Highly Fluctuating Atmospheric Conditions. IEEE Trans. Ind. Inform. 2017, 3203, 2406–2416. [Google Scholar] [CrossRef]
- Mohanty, S.; Subudhi, B.; Member, S.; Ray, P.K. A Grey Wolf Assisted Perturb & Observe MPPT Algorithm for a PV System. IEEE Trans. Energy Convers. 2016, 8969, 340–347. [Google Scholar]
- Seyedmahmoudian, M.; Horan, B.; Rahmani, R.; Maung, A.; Oo, T. Efficient Photovoltaic System Maximum Power Point. Energies 2016, 9, 147. [Google Scholar] [CrossRef]
- Seyedmahmoudian, M.; Soon, T.K.; Horan, B. New ARMO-based MPPT Technique to Minimize Tracking Time and Fluctuation at Output of PV Systems under Rapidly Changing Shading Conditions. IEEE Trans. Ind. Inform. 2019, 3203, 1–12. [Google Scholar] [CrossRef]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Title 3 |
|---|---|
| Maximum Power (Pm) | 250 W |
| Open–circuit Voltage (Voc) | 36.0 V |
| Short–circuit Current (Isc) | 8.56 A |
| Maximum Power Voltage (Vmmp) | 30.2 V |
| Maximum Power Current (Immp) | 8.28 A |
| Number of Series Modules (Ns) | 10 |
| Number of Parallel Modules (Np) | 2 |
| Shading Distribution | Unshaded (0:0) | Case1 (4:0): GMPP at End | Case2 (6:3): GMPP at Middle | Case3 (3:3): GMPP at Beginning |
|---|---|---|---|---|
| Pm (kW) | 4.56 | 3.27 | 2.27 | 3.15 |
| Vm (V) | 292.9 | 293.8 | 206.35 | 203.65 |
| Control Parameters | Tuned |
|---|---|
| KP | 0.0059 |
| Ki | 100.007 |
| Kd | 8.74 × 10−9 |
| Control Parameters | Tuned |
|---|---|
| Rise Time (s) | 4.57 × 10−5 |
| Settling Time (s) | 0.000146 |
| Overshoot (%) | 8.99 |
| Peak | 1.09 |
| Scenario | Module | Irradiation | Max. Power |
|---|---|---|---|
| Scenario 1 | 1–4, 11–14 | 1000 | 2285.09 |
| 5, 6, 7, 15, 16, 17 | 600 | 2250.82 | |
| 8, 9, 10, 18, 19, 20 | 400 | 1963.30 | |
| Scenario 2 | 1–5, 11–20 | 350 | 1445.23 |
| 6, 7, 8, 9, 10 | 900 | 1600.11 | |
| Scenario 3 | 1–5, 11–15 | 1200 | 3300.01 |
| 6–10, 16–20 | 600 | 3000.33 |
| Shading Scenario and Max. Power from P-V Curve | Tracking Method | Actual Power (W) | Duty Cycle | Convergence Time (s) | % Tracking Efficiency |
|---|---|---|---|---|---|
| Scenario 1 (2285.09 W) | CSA-PID | 2285.09 | 0.5383 | 0.28 | 100 |
| CSA | 2274.6 | 0.3842 | 0.63 | 99.54 | |
| MPSO | 2283.8 | 0.6166 | 0.1 | 99.94 | |
| PSO | 2284.68 | 0.5252 | 2.3 | 99.98 | |
| MP&O | 2283.5 | 0.5195 | 0.3 | 99.93 | |
| Scenario 2 (1600.11 W) | CSA-PID | 1598 | 0.3878 | 0.71 | 99.99 |
| CSA | 1590.1 | 0.6165 | 0.8 | 99.53 | |
| MPSO | 1580.3 | 0.3429 | 0.92 | 99.386 | |
| PSO | 1596.8 | 0.3832 | 0.4 | 98.666 | |
| MP&O | 1258.1 | 0.5198 | 2.32 | 97.496 | |
| Scenario 3 (3300.01 W) | CSA-PID | 1598 | 0.3878 | 0.71 | 99.99 |
| CSA | 1590.1 | 0.6165 | 0.8 | 99.53 | |
| MPSO | 1580.3 | 0.3429 | 0.92 | 99.386 | |
| PSO | 1596.8 | 0.3832 | 0.4 | 98.666 | |
| MP&O | 1258.1 | 0.5198 | 2.32 | 97.496 |
| Shading Scenario and Max. Power from P-V Curve | Tracking Method | Power (W) | Convergence Time (s) | % Tracking Efficiency |
|---|---|---|---|---|
| Scenario 1 (2285.09 W) | CSA-PID | 2286.09 | 0.5 | 100 |
| CSA | 2274.6 | 0.76 | 99.54 | |
| MPSO | 2283.8 | 1.00 | 99.94 | |
| PSO | 2250.68 | 3.5 | 98.49 | |
| MP&O | 2190.5 | 1.89 | 95.86 | |
| Scenario 2 (1600.11 W) | CSA-PID | 1598 | 0.51 | 99.99 |
| CSA | 1590.73 | 0.98 | 99.53 | |
| MPSO | 1588.3 | 0.92 | 99.386 | |
| PSO | 1576.8 | 3.23 | 98.666 | |
| MP&O | 1558.1 | 0.93 | 97.496 | |
| Scenario 3 (3300.01 W) | CSA-PID | 3299.6 | 0.5 | 99.97 |
| CSA | 3285.9 | 1.3 | 99.57 | |
| MPSO | 3290.4 | 1.21 | 99.708 | |
| PSO | 3230.8 | 3.56 | 97.90 | |
| MP&O | 3089.3 | 2.19 | 93.61 | |
| Scenario 4 (2100.66 W) | CSA-PID | 2100.6 | 0.45 | 100 |
| CSA | 2096 | 1.56 | 99.778 | |
| MPSO | 2086.9 | 0.899 | 99.34 | |
| PSO | 2043.97 | 2.89 | 97.301 | |
| MP&O | 2028.2 | 2.3 | 96.55 | |
| Scenario 5 (1903.6 W) | CSA-PID | 1903.1 | 0.32 | 99.97 |
| CSA | 1902.4 | 2.01 | 99.93 | |
| MPSO | 1890.3 | 1.22 | 99.30 | |
| PSO | 1859 | 3.10 | 97.657 | |
| MP&O | 1831.5 | 2.46 | 96.212 |
| Evaluated Parameter | [48,49] | [50,51] | [52,53] | [54] | [32] | InC | Proposed CSA-PID |
|---|---|---|---|---|---|---|---|
| GMPP tracking capability | Yes | Yes | Yes | Yes | Yes | No | Yes |
| Simplicity | Medium | Medium | Medium | Simple | Simple | Simple | Simple |
| Efficiency | High | High | High | High | High | Low | Very High |
| Tracking speed | Medium | Medium | Medium | Medium | High | High | Very High |
| Steady-state oscillation | No | No | No | No | No | Yes | No |
| Initial location dependency | Yes | No | Yes | No | No | Yes | No |
| Reliability | Medium | Medium | Medium | Medium | High | Low | Very High |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Al-Wesabi, I.; Fang, Z.; Farh, H.M.H.; Al-Shamma’a, A.A.; Al-Shaalan, A.M.; Kandil, T.; Ding, M. Cuckoo Search Combined with PID Controller for Maximum Power Extraction of Partially Shaded Photovoltaic System. Energies 2022, 15, 2513. https://doi.org/10.3390/en15072513
Al-Wesabi I, Fang Z, Farh HMH, Al-Shamma’a AA, Al-Shaalan AM, Kandil T, Ding M. Cuckoo Search Combined with PID Controller for Maximum Power Extraction of Partially Shaded Photovoltaic System. Energies. 2022; 15(7):2513. https://doi.org/10.3390/en15072513
Chicago/Turabian StyleAl-Wesabi, Ibrahim, Zhijian Fang, Hassan M. Hussein Farh, Abdullrahman A. Al-Shamma’a, Abdullah M. Al-Shaalan, Tarek Kandil, and Min Ding. 2022. "Cuckoo Search Combined with PID Controller for Maximum Power Extraction of Partially Shaded Photovoltaic System" Energies 15, no. 7: 2513. https://doi.org/10.3390/en15072513