
Effects of an Unsteady Morphing Wing with Seamless Side-Edge Transition on Aerodynamic Performance


Abstract
:1. Introduction
2. Problem Definition
2.1. Unsteady Geometry Parameterization of a Dynamically Morphing TEF
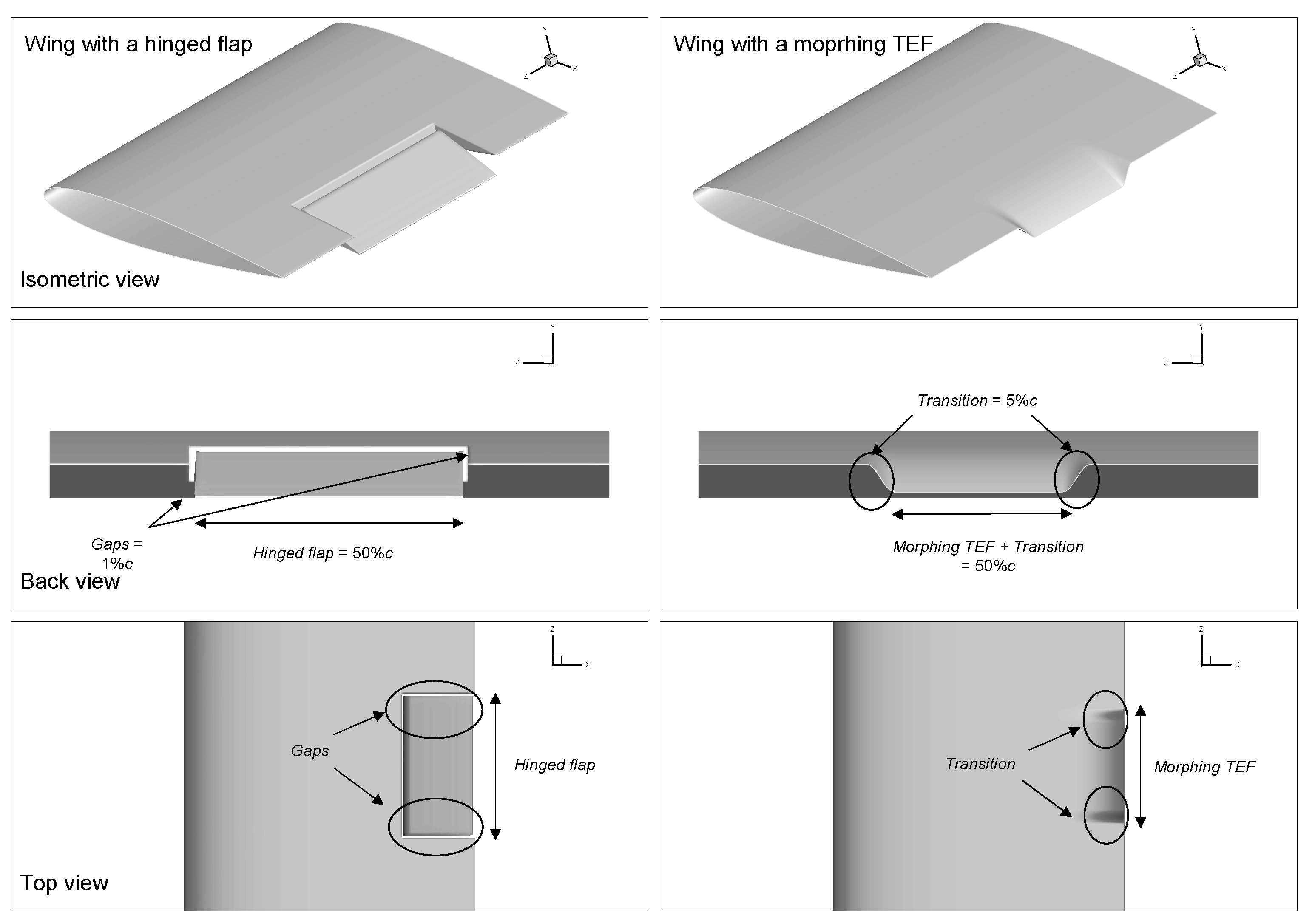
2.2. RANS Study of a Statically Morphed TEF vs. a Hinged Flap
Experimental Data
3. Computational Setup
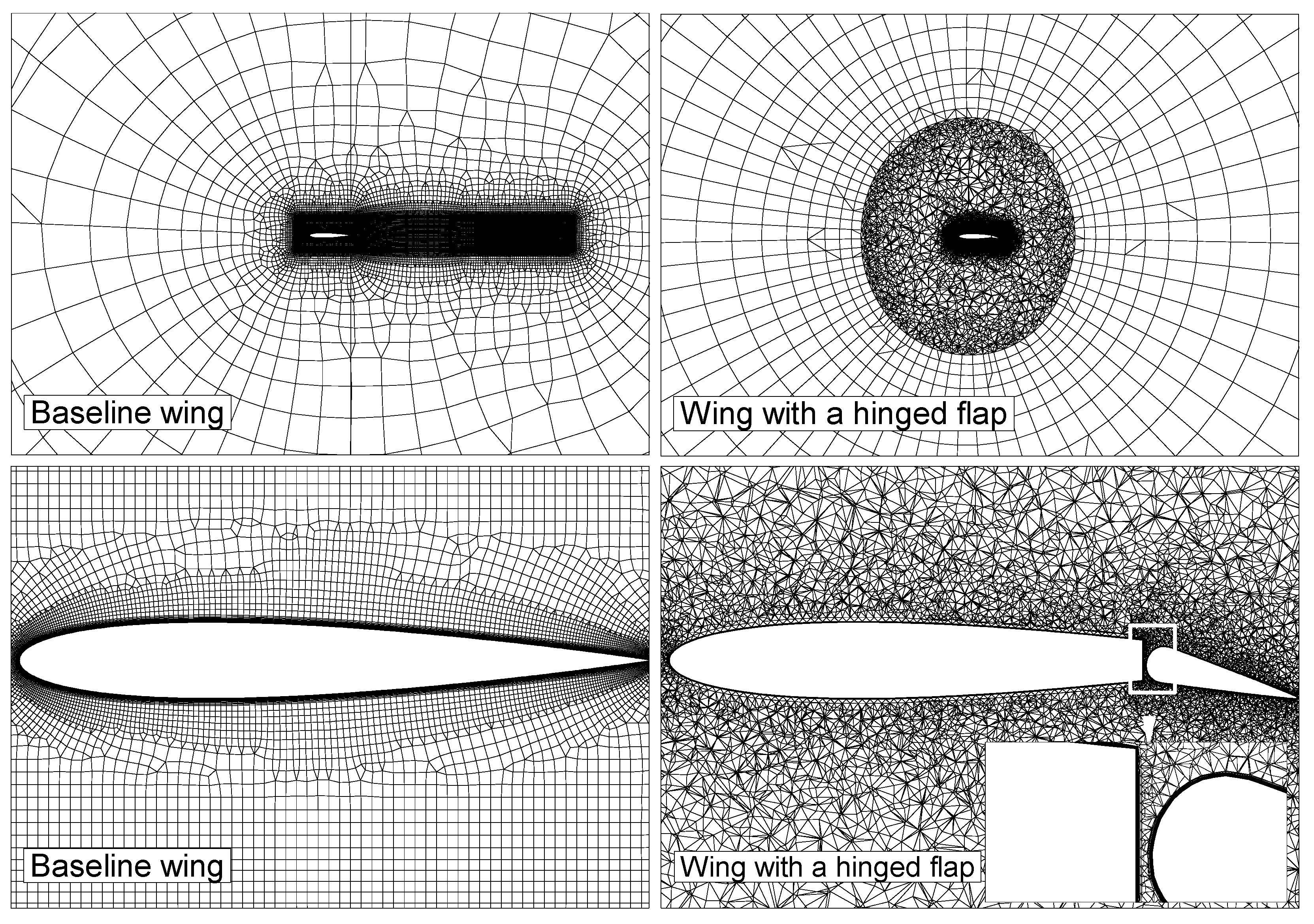
3.1. Steady RANS
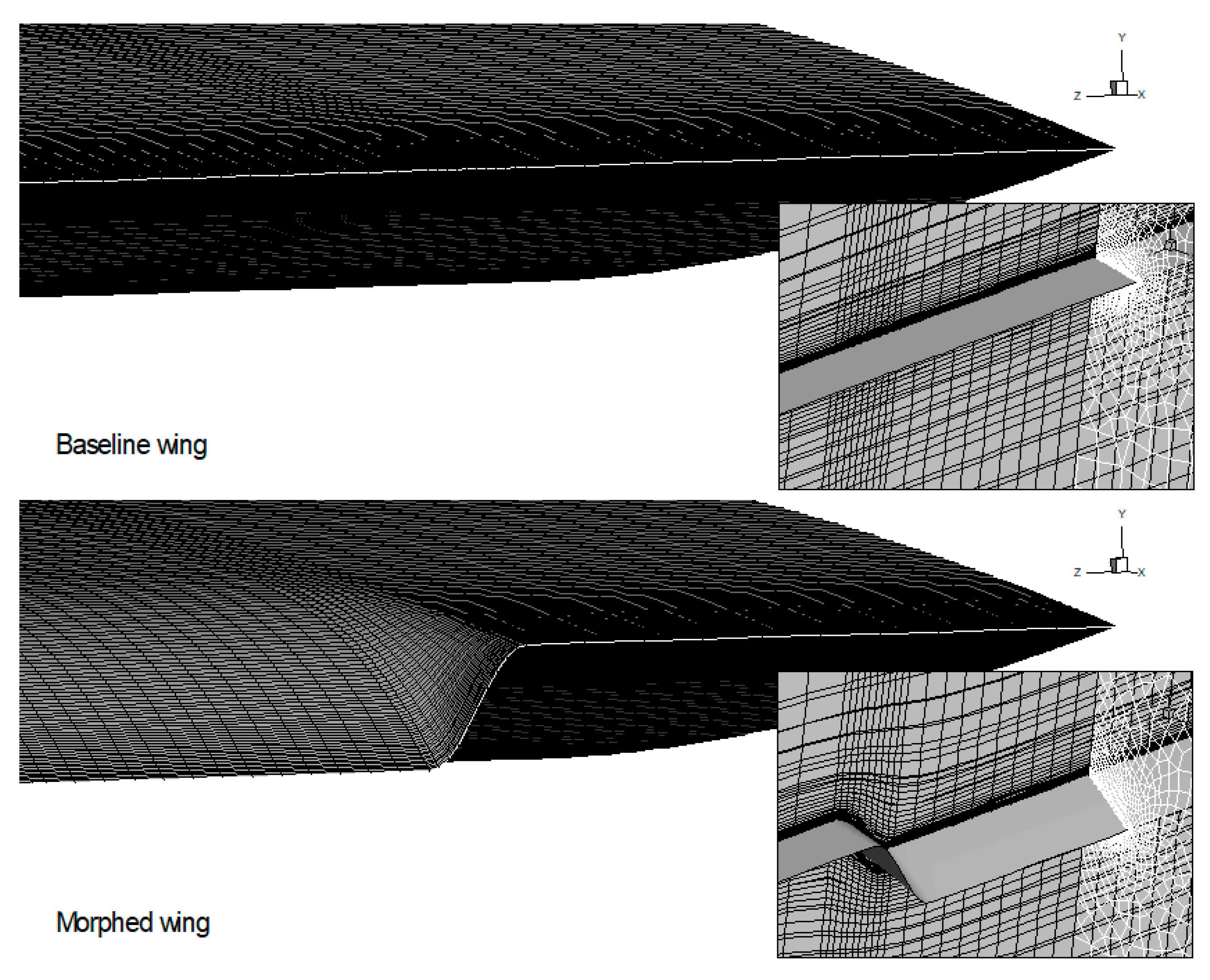
3.2. Unsteady RANS and Dynamic Meshing
4. Results and Discussion
4.1. Baseline Comparative Study
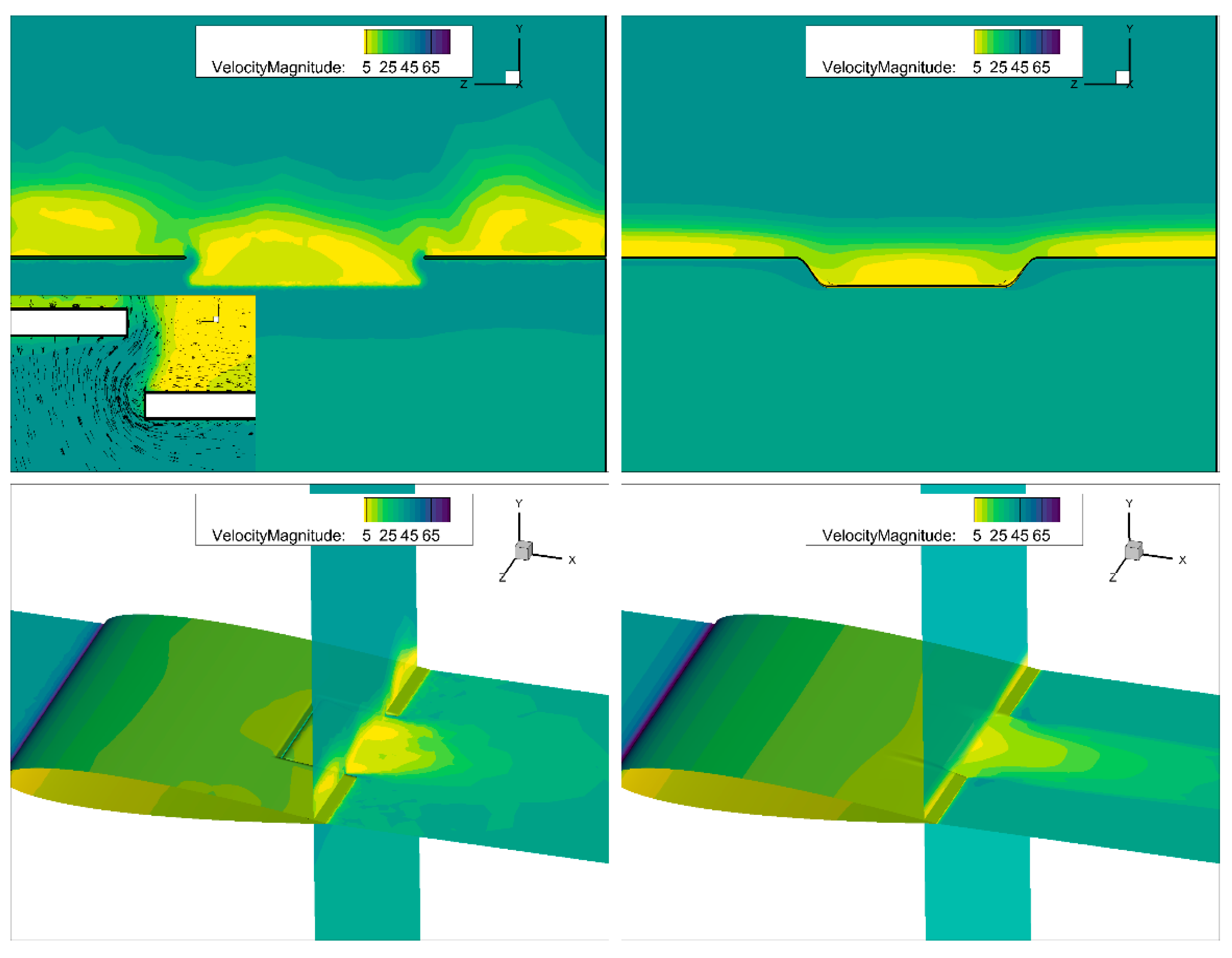
4.2. Statically Morphed TEF vs. Hinged Flap
4.3. Unsteady RANS of a Dynamically Morphing TEF
4.4. Practical Implementation
5. Conclusion and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| AoA | angle of attack, ° |
| c | airfoil chord length, m |
| CD | drag coefficient |
| CL | lift coefficient |
| CL,max | maximum lift coefficient |
| Cf | skin friction coefficient |
| Cp | pressure coefficient |
| h | half-amplitude of the control surface deflection, m |
| l | non-dimensional spanwise length of morphing portion of transition |
| S | wing span, m |
| t | time, s |
| th | maximum airfoil thickness in tenths of chord |
| T | morphing period, s |
| U | free stream velocity, m/s |
| wte | non-dimensional maximum vertical Trailing Edge deflection distance |
| non-dimensional distance along the chord | |
| xs | non-dimensional morphing start location |
| yc | non-dimensional camber line |
| yt | non-dimensional thickness distribution |
| non-dimensional spanwise transition distribution | |
| zt | non-dimensional vertical TE displacement for the transition part |
References
- European Commission; Dareki, M.; Edelstenne, C.; Enders, T.; Fernandez, E.; Hartman, P.; Herteman, J.-P.; Kerkloh, M.; King, I.; Ky, P.; et al. Flightpath 2050: Europe’s Vision for Aviation; Publications Office of the European Union: Luxembourg, 2011; Volume 28, ISBN 978-92-79-19724-6. [Google Scholar] [CrossRef]
- Gabor, O.S.; Koreanschi, A.; Botez, R.M. A new non-linear vortex lattice method: Applications to wing aerodynamic optimizations. Chin. J. Aeronaut. 2016, 29, 1178–1195. [Google Scholar] [CrossRef] [Green Version]
- Abdessemed, C.; Viba, J. Investigation of flight of micro aerial vehicle with flapping wings. Eng. Rural Dev. 2014, 13, 234–240. [Google Scholar]
- Osborn, R.F.; Kota, S.; Hetrick, J.A.; Geister, D.E.; Tilmann, C.P.; Joo, J. Active flow control using high-frequency compliant structures. J. Aircr. 2004, 41, 603–609. [Google Scholar] [CrossRef]
- Communier, D.; Botez, R.M.; Wong, T. Experimental validation of a new morphing trailing edge system using Price—Païdoussis wind tunnel tests. Chin. J. Aeronaut. 2019, 32, 1353–1366. [Google Scholar] [CrossRef]
- Grigorie, T.L.; Khan, S.; Boötes, R.M.; Mamou, M.; Mébarki, Y. Design and experimental testing of a control system for a morphing wing model actuated with miniature BLDC motors. Chin. J. Aeronaut. 2019, 33, 1272–1287. [Google Scholar] [CrossRef]
- Weisshaar, T. Morphing aircraft technology-new shapes for aircraft design. Multifunct. Struct./Integr. Sens. Antennas 2006, O1-1–O1-20. [Google Scholar] [CrossRef]
- Barbarino, S.; Bilgen, O.; Ajaj, R.M.; Friswell, M.I.; Inman, D.J. A Review of Morphing Aircraft. J. Intell. Mater. Syst. Struct. 2011, 22, 823–877. [Google Scholar] [CrossRef]
- Smith, S.B.; Nelson, D.W. Determination of the aerodynamic characteristics of the mission adaptive wing. J. Aircr. 1990, 27, 950–958. [Google Scholar] [CrossRef]
- Moens, F. Augmented aircraft performance with the use of morphing technology for a turboprop regional aircraft wing. Biomimetics 2019, 4, 64. [Google Scholar] [CrossRef] [Green Version]
- Arena, M.; Palumbo, R.; Pecora, R.; Amoroso, F.; Amendola, G.; Dimino, I. Flutter clearance investigation of camber-morphing aileron tailored for a regional aircraft. J. Aerosp. Eng. 2019, 32, 4018146. [Google Scholar] [CrossRef]
- Jianyang, Z.; Lin, J.; Yu, H. Aerodynamic performance of the three-dimensional lumped flexibility bionic hovering wing. Int. J. Aerosp. Eng. 2018, 2018, 1314258. [Google Scholar] [CrossRef]
- Arena, M.; Concilio, A.; Pecora, R. Aero-servo-elastic design of a morphing wing trailing edge system for enhanced cruise performance. Aerosp. Sci. Technol. 2019, 86, 215–235. [Google Scholar] [CrossRef]
- Bowers, A.H.; Murillo, O.J.; Jensen, R.R.; Eslinger, B.; Gelzer, C. On Wings of the Minimum Induced Drag: Spanload Implications for Aircraft and Birds; NASA: Washington, DC, USA, 2016.
- Nguyen, N. Project Elastically Shaped Future Air Vehicle Concept. NASA Innovation Fund Award 2010. Available online: https://www.nasa.gov/pdf/499930main_arc_nguyen_elastically_shaped.pdf (accessed on 14 November 2021).
- Urnes, J.; Nguyen, N. A Mission Adaptive Variable Camber Flap Control System to Optimize High Lift and Cruise Lift to Drag Ratios of Future N+3 Transport Aircraft. In Proceedings of the 51st AIAA Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition (AIAA-2013-214), Grapevine, TX, USA, 7–10 January 2013; pp. 1–24. [Google Scholar] [CrossRef] [Green Version]
- Daochun, L.; Shijun, G.; Osman, A.T.; Daqing, Y.; Jinwu, X. Active control design for an unmanned air vehicle with a morphing wing. Aircr. Eng. Aerosp. Technol. Int. J. 2016, 88, 168–177. [Google Scholar] [CrossRef]
- Macaraeg, M. Fundamental investigations of airframe noise. In Proceedings of the 4th AIAA/CEAS Aeroacoustics Conference, Toulouse, France, 2–4 June 1998; American Institute of Aeronautics and Astronautics: Toulouse, France, 1998; pp. 123–132. [Google Scholar] [CrossRef] [Green Version]
- Daynes, S.; Weaver, P.M. A morphing trailing edge device for a wind turbine. J. Intell. Mater. Syst. Struct. 2012, 23, 691–701. [Google Scholar] [CrossRef]
- Pisetta, G.; Le Mestre, R.; Viola, I.M. Morphing blades for tidal turbines: A theoretical study. Renew. Energy 2022, 183, 802–819. [Google Scholar] [CrossRef]
- Khorrami, M.R.; Lockard, D.P.; Moore, J.B.; Su, J.; Turner, T.L.; Lin, J.C.; Taminger, K.M.; Kahng, S.K.; Verden, S.A. Elastically Deformable Side-Edge Link for Trailing-Edge Flap Aeroacoustic Noise Reduction. US20120153086A1, 15 April 2014. [Google Scholar]
- Kota, S.; Osborn, R.; Ervin, G.; Maric, D.; Flick, P.; Paul, D. Mission adaptive compliant wing–design, fabrication and flight test. In Proceedings of the RTO Applied Vehicle Technology Panel (AVT) Symposium, Evora, Portugal, 20–24 April 2009. [Google Scholar]
- Kota, S.; Flick, P.; Collier, F.S. Flight Testing of FlexFloil TM Adaptive Compliant Trailing Edge. In Proceedings of the 54th AIAA Aerospace Sciences Meeting, San Diego, CA, USA, 4–8 January 2016; pp. 1–13. [Google Scholar] [CrossRef]
- NASA. Hear This: 30 Percent Less Noise. Available online: https://www.nasa.gov/centers/armstrong/feature/ACTE_30_percent_less_noise.html (accessed on 13 April 2017).
- Woods, B.K.S.; Parsons, L.; Coles, A.B.; Fincham, J.H.S.; Friswell, M.I. Morphing elastically lofted transition for active camber control surfaces. Aerosp. Sci. Technol. 2016, 55, 439–448. [Google Scholar] [CrossRef] [Green Version]
- Woods, B.K.S.; Friswell, M.I. Preliminary investigation of a fishbone active camber concept. In Proceedings of the ASME 2012 Conference on Smart Materials, Adaptive Structures and Intelligent Systems, Stone Mountain, GA, USA, 19–21 September 2012; pp. 555–563. [Google Scholar]
- Molinari, G.; Quack, M.; Dmitriev, V.; Morari, M.; Jenny, P.; Ermanni, P. Aero-Structural Optimization of Morphing Airfoils for Adaptive Wings. J. Intell. Mater. Syst. Struct. 2011, 22, 1075–1089. [Google Scholar] [CrossRef]
- Obradovic, B.; Subbarao, K. Modeling and Simulation of Morphing Wing Aircraft. In Morphing Aerospace Vehicles and Structures; Valasek, J., Ed.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2012; Volume 48, pp. 87–125. [Google Scholar] [CrossRef]
- Koreanschi, A.; Gabor, O.S.; Acotto, J.; Brianchon, G.; Portier, G.; Botez, R.M.; Mamou, M.; Mebarki, Y. Optimization and design of an aircraft’s morphing wing-tip demonstrator for drag reduction at low speed, Part I—Aerodynamic optimization using genetic, bee colony and gradient descent algorithms. Chin. J. Aeronaut. 2017, 30, 149–163. [Google Scholar] [CrossRef]
- Lyu, Z.; Martins, J.R.R.A. Aerodynamic Shape Optimization of an Adaptive Morphing Trailing-Edge Wing. J. Aircr. 2015, 52, 1951–1970. [Google Scholar] [CrossRef] [Green Version]
- Jawahar, H.K.; Ai, Q.; Azarpeyvand, M. Experimental and Numerical Investigation of Aerodynamic Performance of Airfoils Fitted with Morphing Trailing-edges. In Proceedings of the 23rd AIAA/CEAS Aeroacoustics Conference, Denver, CO, USA, 5–9 June 2017; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2017. [Google Scholar] [CrossRef] [Green Version]
- Ninian, D.; Dakka, S. Design, Development and Testing of Shape Shifting Wing Model. Aerospace 2017, 4, 52. [Google Scholar] [CrossRef] [Green Version]
- Rivero, A.E.; Fournier, S.; Manolesos, M.; Cooper, J.E.; Woods, B.K.S. Experimental Aerodynamic Comparison of Active Camber Morphing and Trailing-Edge Flaps. AIAA J. 2021, 59, 2627–2640. [Google Scholar] [CrossRef]
- Abdessemed, C.; Yao, Y.; Bouferrouk, A.; Narayan, P. Morphing airfoils unsteady flow analysis using dynamic meshing. Int. J. Numer. Methods Heat Fluid Flow 2018, 28, 1117–1133. [Google Scholar] [CrossRef] [Green Version]
- Abdessemed, C.; Yao, Y.; Narayan, P.; Bouferrouk, A. Unsteady parametrization of a morphing wing design for improved aerodynamic performance. In Proceedings of the 52rd 3AF International Conference on Applied Aerodynamics, Lyon, France, 27–29 March 2017; pp. 1–10. [Google Scholar]
- Abdessemed, C.; Yao, Y.; Bouferrouk, A.; Narayan, P. Flow Response to Rapid Morphing Flap Deflection. In Proceedings of the 54th 3AF International Conference on Applied Aerodynamics, Paris, France, 25–27 March 2019; pp. 1–10. [Google Scholar]
- Abdessemed, C.; Yao, Y.; Bouferrouk, A. Near Stall Unsteady Flow Responses to Morphing Flap Deflections. Fluids 2021, 6, 180. [Google Scholar] [CrossRef]
- Abdessemed, C.; Bouferrouk, A.; Yao, Y. Aerodynamic and Aeroacoustic Analysis of a Harmonically Morphing Airfoil Using Dynamic Meshing. Acoustics 2021, 3, 177–199. [Google Scholar] [CrossRef]
- ANSYS Release 18.2, Help System; Ansys: Canonsburg, PA, USA, 2018.
- Abdessemed, C. Dynamic Mesh Framework for Morphing Wings CFD—User Defined Function. 2020. Available online: https://doi.org/10.5281/zenodo.3724146(accessed on 3 April 2020).
- Abdessemed, C.; Yao, Y.; Bouferrouk, A.; Narayan, P. Analysis of a 3D Unsteady Morphing Wing with Seamless Side-edge Transition. In Proceedings of the 2018 Applied Aerodynamics Conference, Atlanta, GA, USA, 25–29 June 2018; p. 2897416. [Google Scholar] [CrossRef] [Green Version]
- Medina, A.; Hemati, M.S.; Rockwood, M. Separated flow response to rapid flap deflection. AIAA J. 2020, 58, 1446–1457. [Google Scholar] [CrossRef]
- Abdessemed, C. Dynamic Mesh Framework for Morphing Wings CFD. Ph.D. Thesis, University of the West of England, Bristol, UK, 2019. [Google Scholar]
- Woods, B.K.S.; Fincham, J.H.S.; Friswell, M.I. Aerodynamic Modelling of the Fish Bone Active Camber Morphing Concept. In Proceedings of the RAeS Applied Aerodynamics Conference, Bristol, UK, 22–24 July 2014; Volume 25, pp. 772–785. [Google Scholar] [CrossRef]
- Holst, D.; Church, B.; Pechlivanoglou, G.; Tüzüner, E.; Saverin, J.; Nayeri, C.N.; Paschereit, C.O. Experimental Analysis of a NACA 0021 Airfoil Section Through 180-Degree Angle of Attack at Low Reynolds Numbers for Use in Wind Turbine Analysis. In Proceedings of the ASME Turbo Expo 2017: Turbomachinery Technical Conference and Exposition, Charlotte, NC, USA, 26–30 June 2017. [Google Scholar] [CrossRef]
- Sheldahl, R.E.; Klimas, P.C. Aerodynamic characteristics of seven symmetrical airfoil sections through 180-degree angle of attack for use in aerodynamic analysis of vertical axis wind turbines. Chem. Amp. 1981, SAND80-211, 118. [Google Scholar] [CrossRef] [Green Version]
- Menter, F.R. Best Practice: Scale-Resolving Simulations in ANSYS CFD; Ansys: Canonsburg, PA, USA, 2012; pp. 1–70. [Google Scholar] [CrossRef]
- Spalart, P.R.; Deck, S.; Shur, M.L.; Squires, K.D.; Strelets, M.K.; Travin, A. A new version of detached-eddy simulation, resistant to ambiguous grid densities. Theor. Comput. Fluid Dyn. 2006, 20, 181–195. [Google Scholar] [CrossRef]
- Abdessemed, C.; Yao, Y.; Bouferrouk, A.; Narayan, P. Influence of non-iterative time-advancement schemes on the aerodynamic prediction of pitching airfoils using dynamic mesh. In Proceedings of the 8th International Symposium on Physics of Fluids (ISPF8), Xi’an, China, 10–13 June 2019. [Google Scholar]
- Jain, S.; Sitaram, N.; Krishnaswamy, S. Effect of Reynolds Number on Aerodynamics of Airfoil with Gurney Flap. Int. J. Rotating Mach. 2015, 2015, 628632. [Google Scholar] [CrossRef] [Green Version]
- Abe, K.; Kondoh, T.; Nagano, Y. A new turbulence model for predicting fluid flow and heat transfer in separating and reattaching flows—I. Flow field calculations. Int. J. Heat Mass Transf. 1994, 37, 139–151. [Google Scholar] [CrossRef]
- Arko, B.M.; McQuilling, M. Computational study of high-lift low-pressure turbine cascade aerodynamics at low reynolds number. J. Propuls. Power 2013, 29, 446–459. [Google Scholar] [CrossRef]
- Abdessemed, C.; Yao, Y.; Bouferrouk, A.A.; Narayan, P. Aeroacoustic Investigation of a Harmonically Morphing Trailing Edge Flap. In Proceedings of the 53rd 3AF International Conference on Applied Aerodynamics, Salon de Provence, France, 26–28 March 2018; pp. 23–26. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| AOA | CL | CD | ||||
|---|---|---|---|---|---|---|
| Fluent | Exp | Deltas (%) | Fluent | Exp | Deltas (%) | |
| 4 | 0.448 | 0.429 | 4.337 | 0.008 | 0.008 | 7.735 |
| 6 | 0.680 | 0.646 | 5.014 | 0.012 | 0.010 | 10.700 |
| 8 | 0.857 | 0.824 | 3.833 | 0.013 | 0.013 | 4.923 |
| 10 | 0.996 | 0.993 | 0.361 | 0.019 | 0.016 | 16.084 |
| 12 | 1.137 | 1.118 | 1.703 | 0.026 | 0.021 | 21.076 |
| 13 | 1.171 | 1.129 | 3.563 | 0.032 | 0.029 | 8.849 |
| 14 | 1.132 | 1.077 | 4.900 | 0.044 | 0.041 | 6.204 |
| Average | 3.38 | 10.79 | ||||
| AoA | CL | CD | ||||
|---|---|---|---|---|---|---|
| NACA0012 | Hinged Flap | Morphed Flap | NACA0012 | Flapped | Morphed | |
| 4 | 0.448 | 0.554 | 0.733 | 0.008 | 0.021 | 0.018 |
| 6 | 0.680 | 0.739 | 0.910 | 0.012 | 0.026 | 0.023 |
| 8 | 0.857 | 0.903 | 1.082 | 0.013 | 0.032 | 0.027 |
| 10 | 0.996 | 1.054 | 1.245 | 0.019 | 0.042 | 0.032 |
| 12 | 1.137 | 1.148 | 1.392 | 0.026 | 0.055 | 0.040 |
| 13 | 1.171 | 1.093 | 1.447 | 0.032 | 0.076 | 0.047 |
| 14 | 1.132 | 0.788 | 1.481 | 0.044 | 0.149 | 0.054 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abdessemed, C.; Bouferrouk, A.; Yao, Y. Effects of an Unsteady Morphing Wing with Seamless Side-Edge Transition on Aerodynamic Performance. Energies 2022, 15, 1093. https://doi.org/10.3390/en15031093
Abdessemed C, Bouferrouk A, Yao Y. Effects of an Unsteady Morphing Wing with Seamless Side-Edge Transition on Aerodynamic Performance. Energies. 2022; 15(3):1093. https://doi.org/10.3390/en15031093
Chicago/Turabian StyleAbdessemed, Chawki, Abdessalem Bouferrouk, and Yufeng Yao. 2022. "Effects of an Unsteady Morphing Wing with Seamless Side-Edge Transition on Aerodynamic Performance" Energies 15, no. 3: 1093. https://doi.org/10.3390/en15031093