

A Study on a Design Considering the Transient State of a Line-Start Permanent Magnet Synchronous Motor Satisfying the Requirements of the IE4 Efficiency Class

Abstract
:1. Introduction
2. Structure and Characteristic of LSPM
3. Design of the LSPMSM
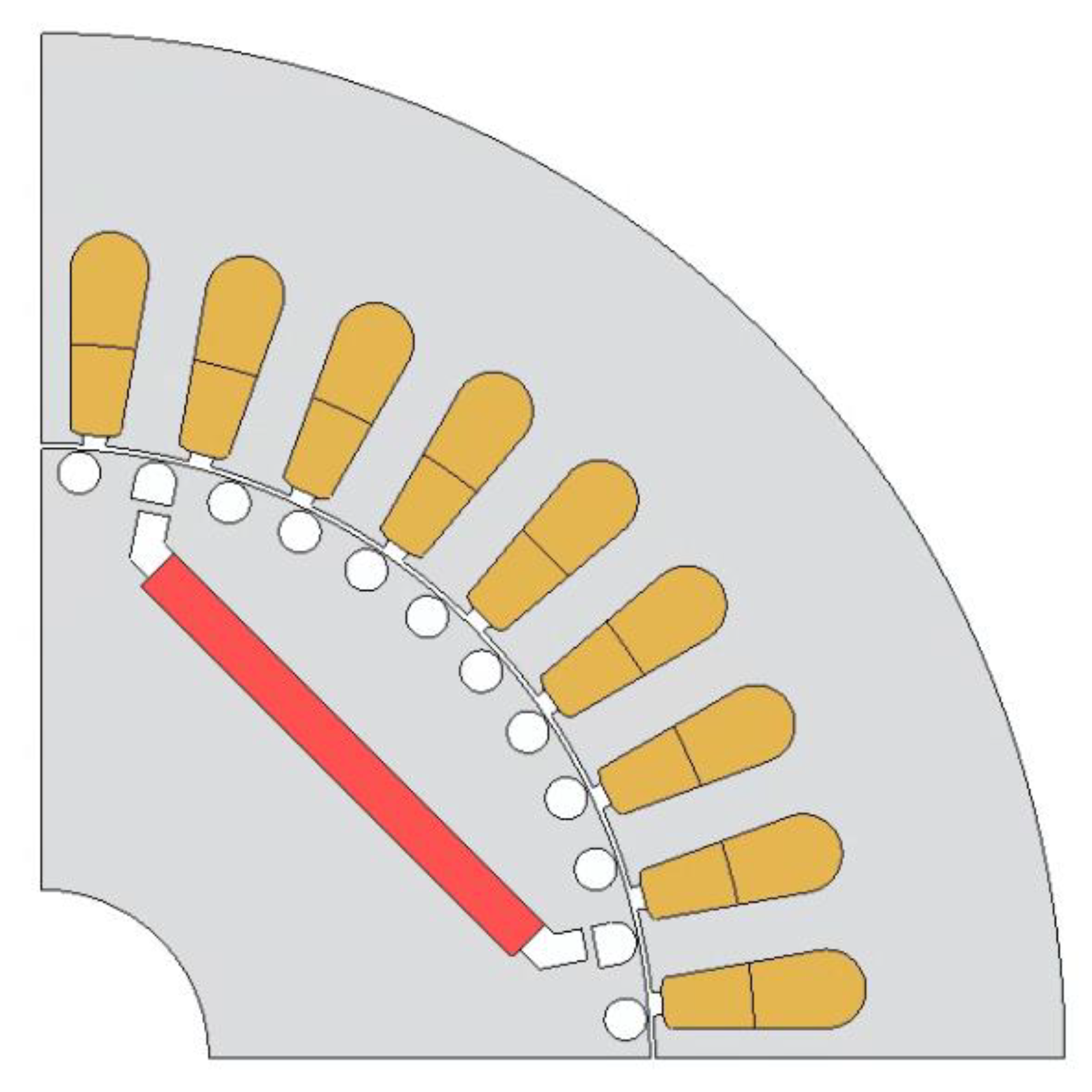
3.1. Determination of the Motor Size and Rotor Slot Shape
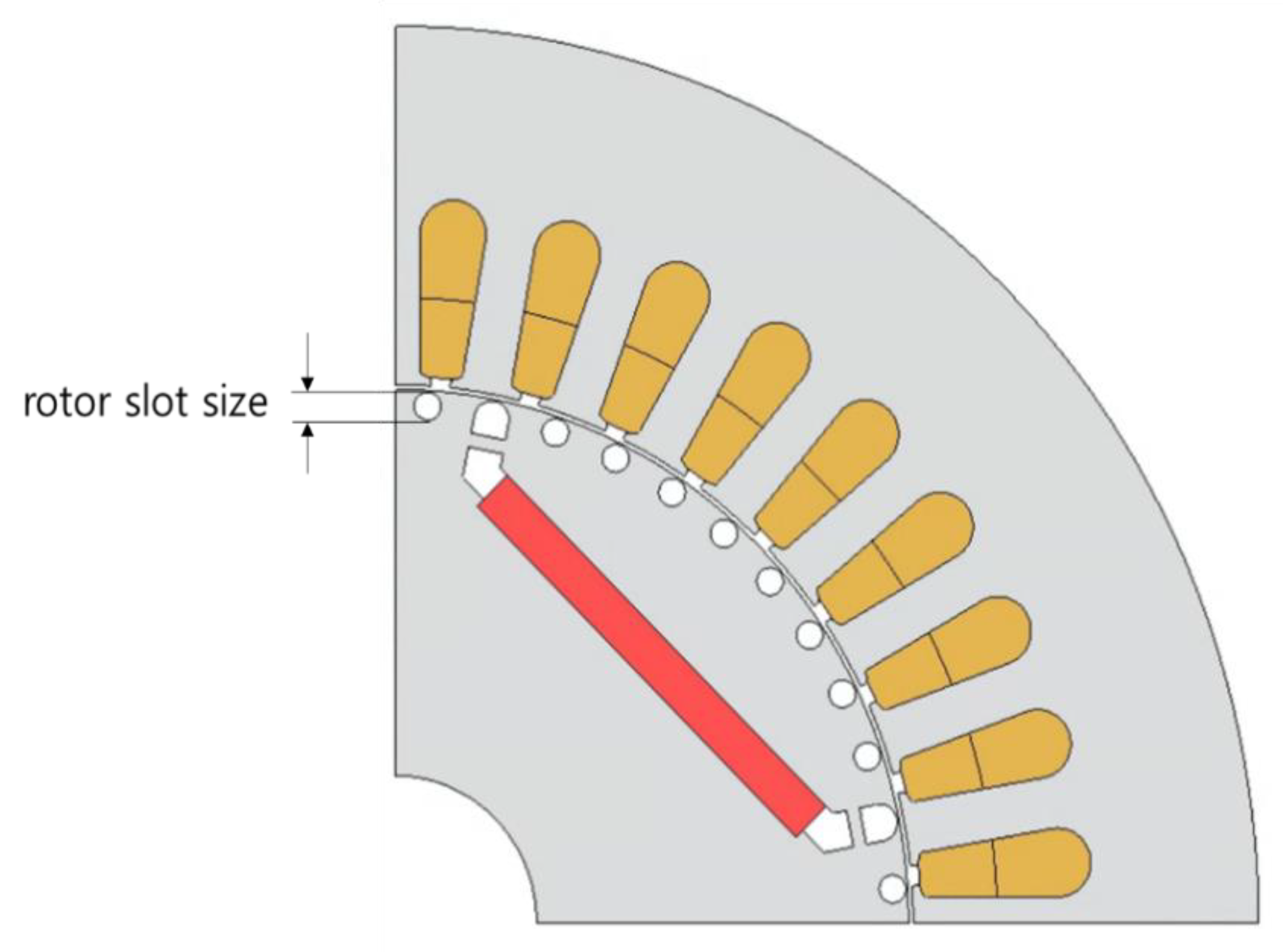
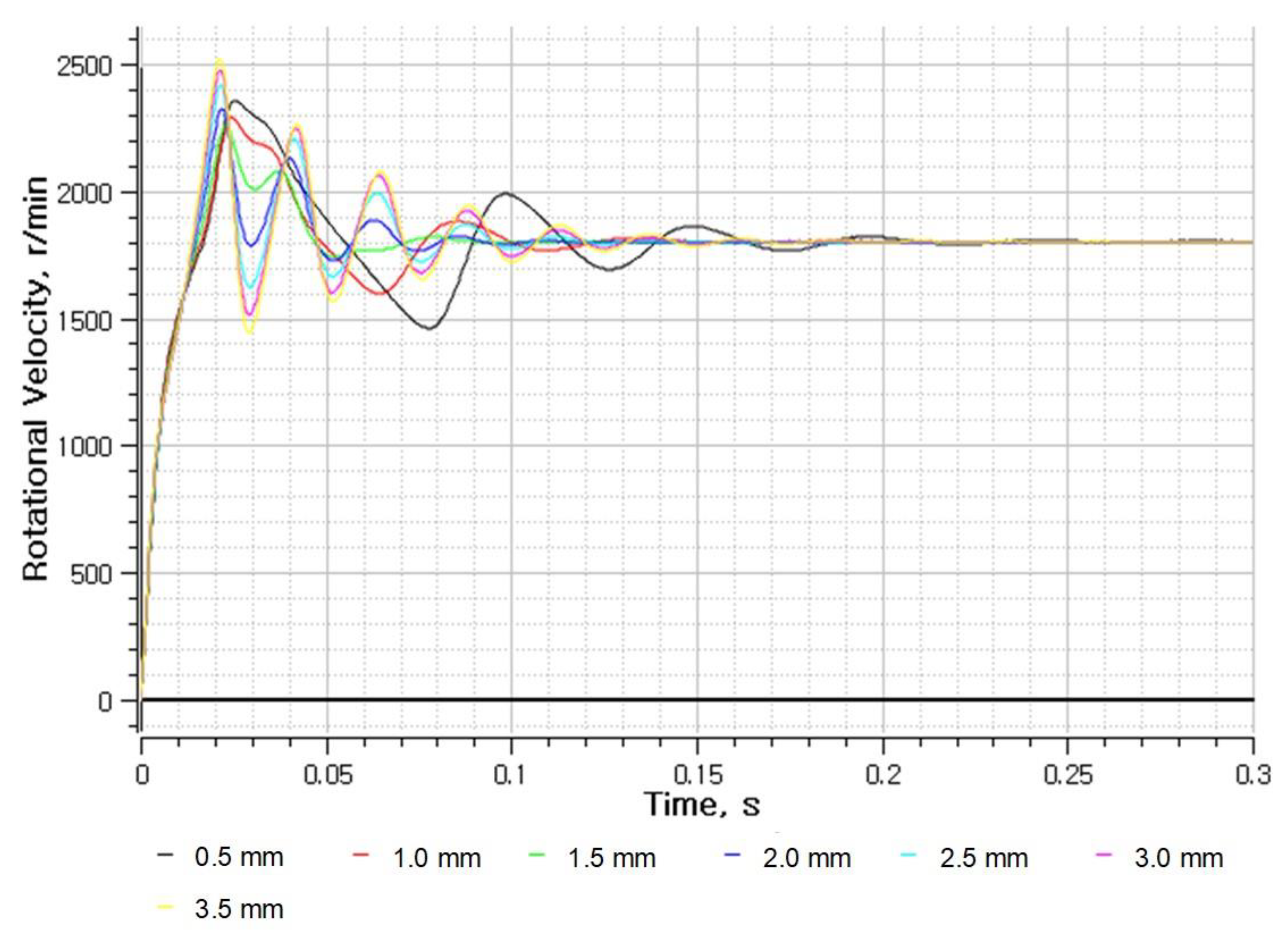
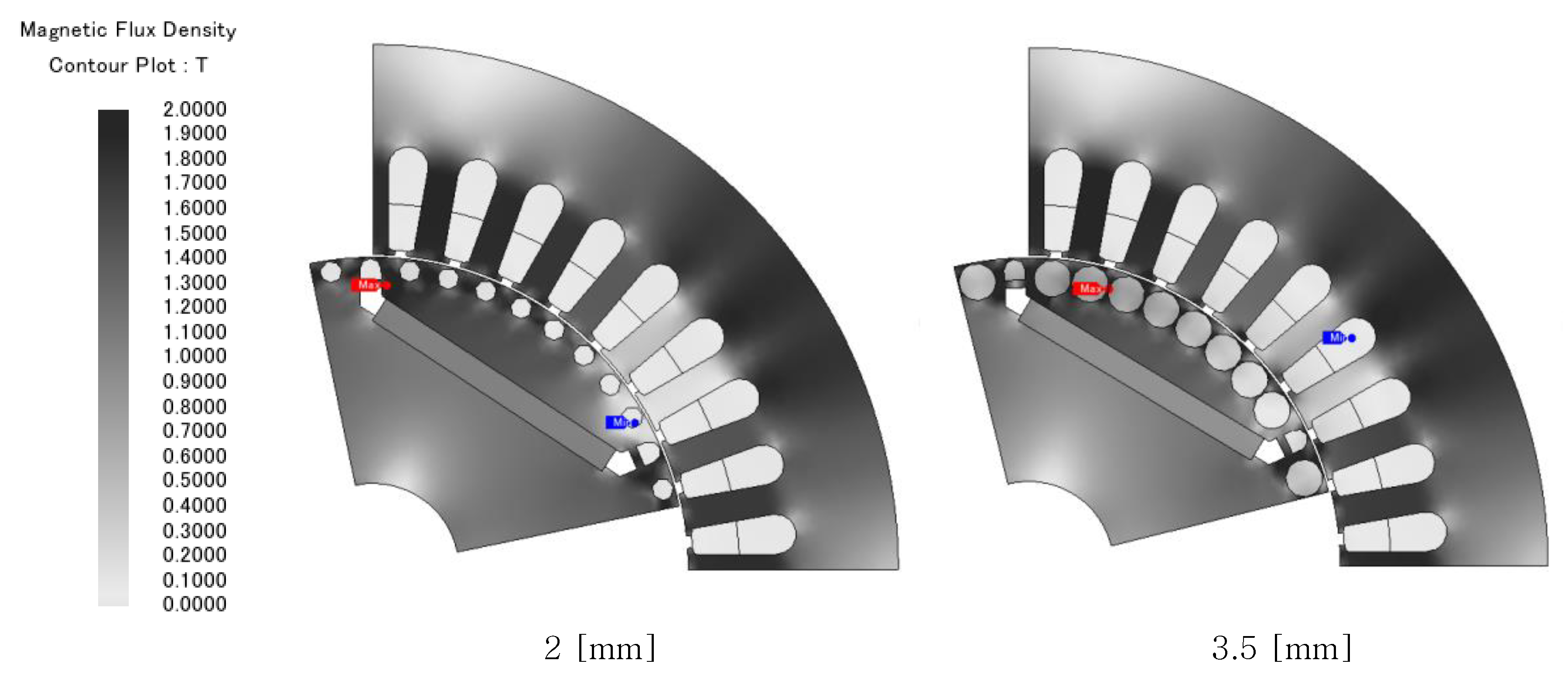
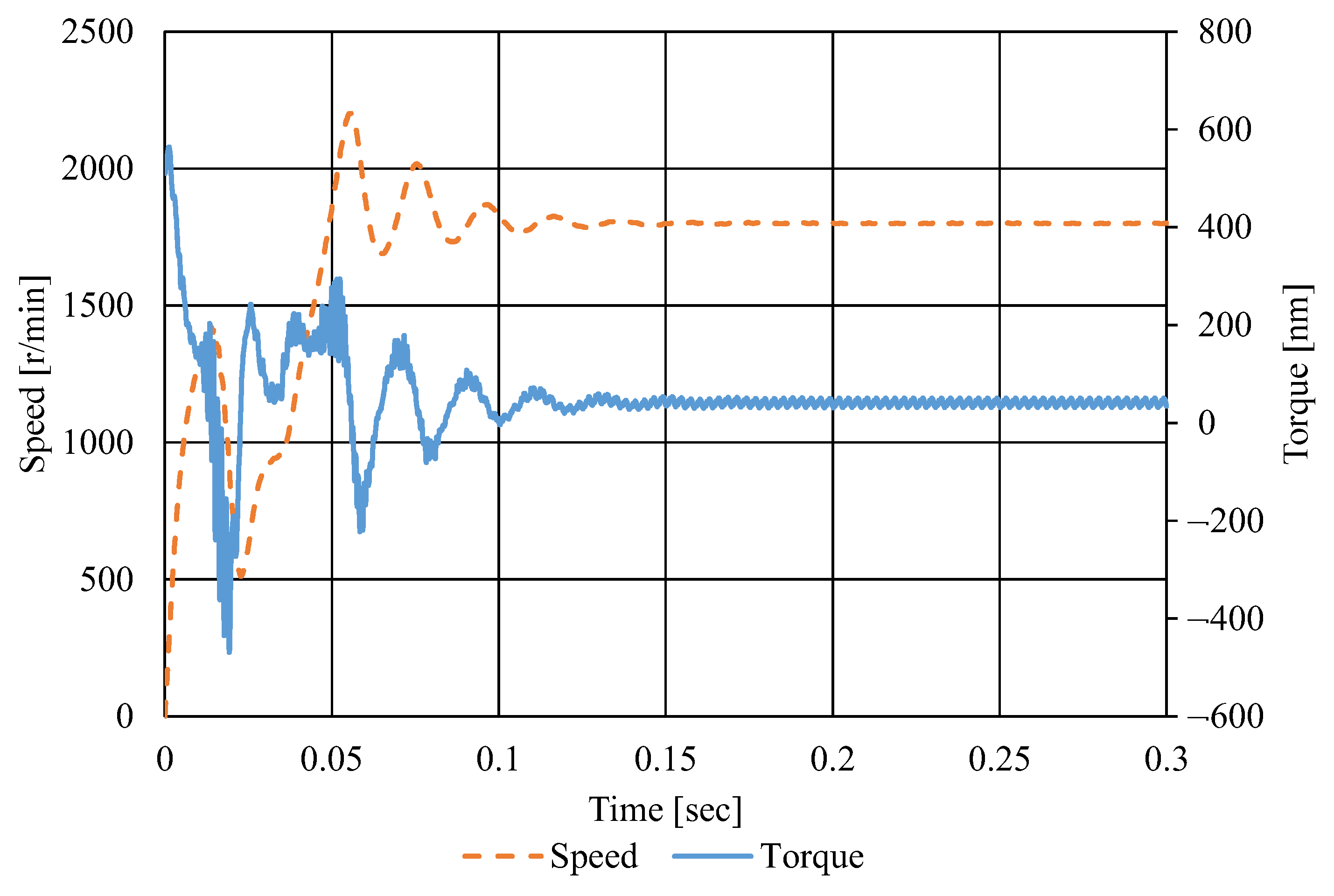
3.2. Design of Rotor Slot Considering Transient State Using FEA
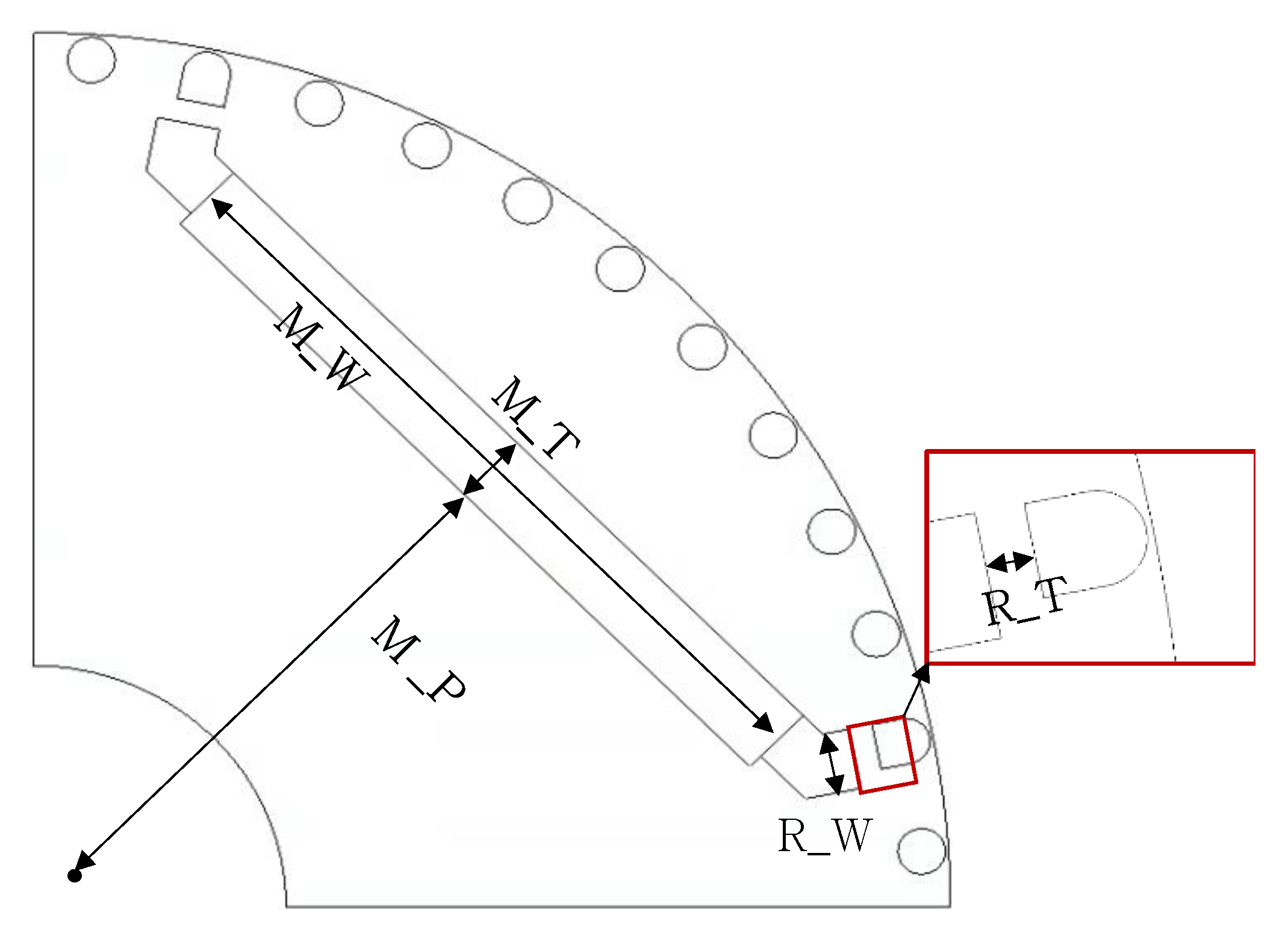
3.3. Optimal Design of Rotor Using Design of Experiments and Finite Element Analysis
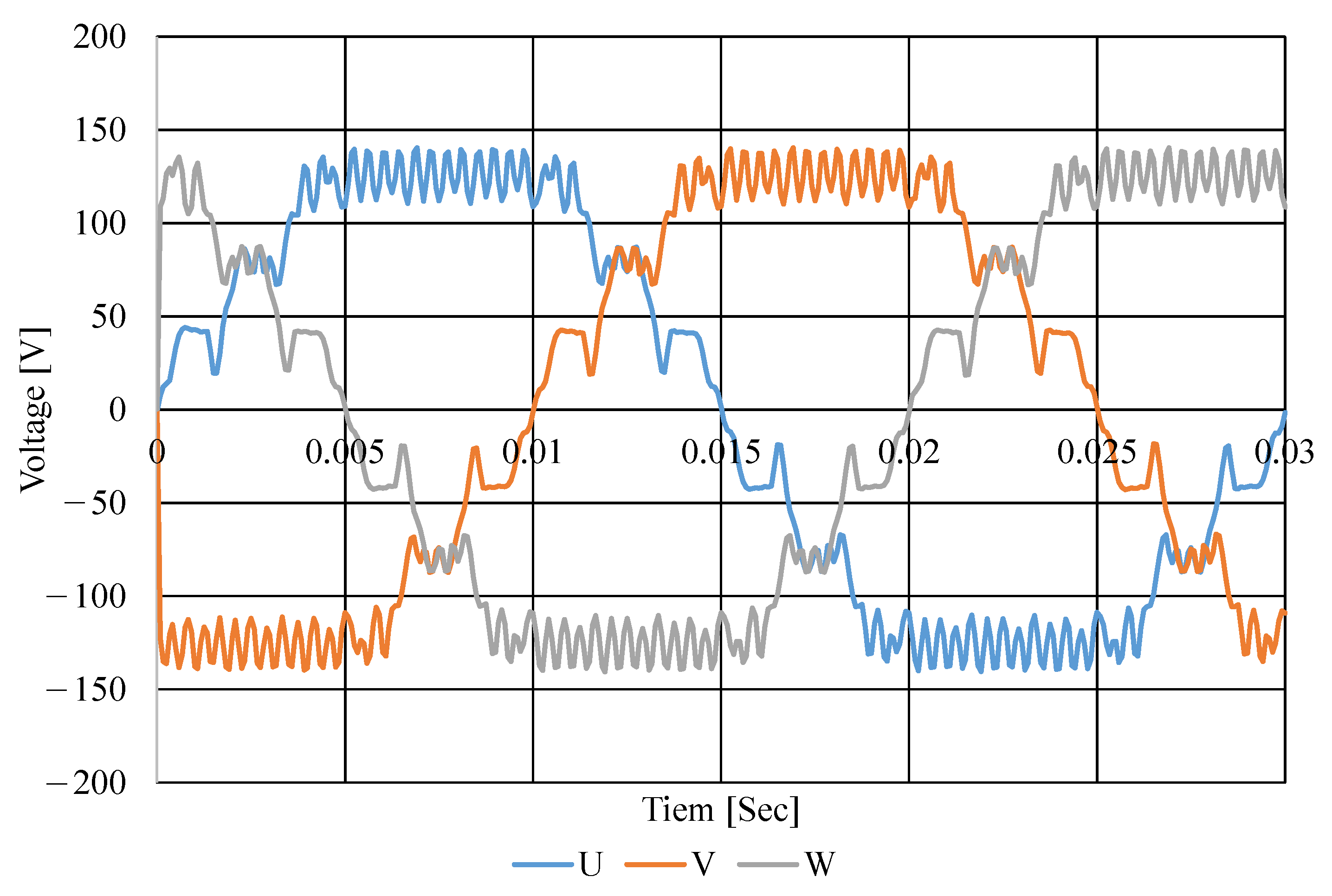
3.4. Design of the Stator Winding Using Finite Element Analysis
4. Test Result
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kim, H.; Park, Y.; Oh, S.-T.; Jeong, G.; Seo, U.-J.; Won, S.-H.; Lee, J. Study on Analysis and Design of Line-Start Synchronous Reluctance Motor Considering Rotor Slot Opening and Bridges. IEEE Trans. Magn. 2022, 58, 1–6. [Google Scholar] [CrossRef]
- Ferreira, F.; Baoming, G.; Almeida, A. Reliability and Operation of High-Efficiency Induction Motors. IEEE Trans. Ind. Appl. 2016, 52, 4628–4637. [Google Scholar] [CrossRef]
- Tabora, J.; Tostes, M.; Bezerra, U.; Matos, E.; Filho, C.; Soares, T.; Rodrigues, C. Assessing Energy Efficiency and Power Quality Impacts Due to High-Efficiency Motors Operating Under Nonideal Energy Supply. IEEE Access 2021, 9, 121871–121882. [Google Scholar] [CrossRef]
- Zöhra, B.; Akar, M.; Eker, M. Design of A Novel Line Start Synchronous Motor Rotor. Electronics 2019, 8, 25. [Google Scholar] [CrossRef] [Green Version]
- Chasiotis, I.D.; Karnavas, Y.L.; Scuiller, F. Effect of Rotor Bars Shape on the Single-Phase Induction Motors Performance: An Analysis toward Their Efficiency Improvement. Energies 2022, 15, 717. [Google Scholar] [CrossRef]
- Lu, X.; Iyer, K.L.V.; Mukherjee, K.; Kar, N.C. Development of a Novel Magnetic Circuit Model for Design of Premium Efficiency Three-Phase Line Start Permanent Magnet Machines With Improved Starting Performance. IEEE Trans. Magn. 2013, 49, 3965–3968. [Google Scholar] [CrossRef]
- Villani, M.; FABRI, G.; Credo, A.; Leonardo, L.; Collazzo, F. Line-Start Synchronous Reluctance Motor: A Reduced Manufacturing Cost Avenue to Achieve IE4 Efficiency Class. IEEE Access 2022, 10, 100094–100103. [Google Scholar] [CrossRef]
- Idziak, P.; Kowalski, K. Analysis of Selected Operating States of the Line Start Synchronous Reluctance Motor Using the Finite Element Method. Energies 2021, 14, 6825. [Google Scholar] [CrossRef]
- Seo, U.-J.; Kim, D.-J.; Han, P.-W.; Chun, Y.-D. FE-Aided Synchronization Analysis of Line-Start Synchronous Reluctance Motors. Appl. Sci. 2021, 11, 11673. [Google Scholar] [CrossRef]
- Yan, B.; Wang, X.; Yang, Y. Comparative Parameters Investigation of Composite Solid Rotor Applied to Line-Start Permanent-Magnet Synchronous Motors. IEEE Trans. Magn. 2018, 54, 11. [Google Scholar] [CrossRef]
- Baek, S.; Kim, B.; Kwon, B. Practical Optimum Design Based on Magnetic Balance and Copper Loss Minimization for a Single-Phase Line Start PM Motor. IEEE Trans. Magn. 2011, 47, 3008–3011. [Google Scholar] [CrossRef]
- Fei, W.; Luk, P.C.K.; Ma, J.; Shen, J.X.; Yang, G. A High-Performance Line-Start Permanent Magnet Synchronous Motor Amended From a Small Industrial Three-Phase Induction Motor. IEEE Trans. Magn. 2009, 45, 4724–4727. [Google Scholar] [CrossRef] [Green Version]
- Fu, W.N.; Chen, Y. A Post-Assembly Magnetization Method for a Line-Start Permanent-Magnet Motor. IEEE Trans. Appl. Super. 2016, 26, 4. [Google Scholar] [CrossRef]
- Kazakbaev, V.; Paramonov, A.; Dmitrievskii, V.; Prakht, V.; Goman, V. Indirect Efficiency Measurement Method for Line-Start Permanent Magnet Synchronous Motors. Mathematics 2022, 10, 1056. [Google Scholar] [CrossRef]
- Li, D.; Feng, G.; Li, W.; Zhang, B.; Zhang, J. Effect of Stator Slots on Electromagnetic Performance of a High-Voltage Line-Start Permanent Magnet Synchronous Motor. Energies 2022, 15, 3358. [Google Scholar] [CrossRef]
- Sarac, V.; Minovski, D.; Janiga, P. Parametric Analysis for Performance Optimization of Line-Start Synchronous Motor with Interior Asymmetric Permanent Magnet Array Rotor Topology. Electronics 2022, 11, 531. [Google Scholar] [CrossRef]
- Schommarz, P.D.; Wang, R.-J. Development of a Transient Synchronization Analysis Tool for Line-Start PM Motors. Energies 2022, 15, 9206. [Google Scholar] [CrossRef]
- Jeon, K.-W.; Chung, T.-K.; Hahn, S.-C. NEMA Class A Slot Shape Optimization of Induction Motor for Electric Vehicle Using Response Surface Method. In Proceedings of the 2011 International Conference on Electrical Machines and Systems, Beijing, China, 20–23 August 2011. [Google Scholar]
- Lee, G.; Min, S.; Hong, J.-P. Optimal Shape Design of Rotor Slot in Squirrel-Cage Induction Motor Considering Torque Characteristic. IEEE Trans. Magn. 2013, 49, 2197–2200. [Google Scholar] [CrossRef]
- Hirotsuka, I.; Tsuboi, K.; Ishibashi, F. Effect of Slot-Combination on Electromagnetic Vibration of Squirrel-Cage Induction Motor under Loaded Condition. In Proceedings of the Power Conversion Conference, Nagaoka, Japan, 6 August 1997. [Google Scholar]
- Kobayashi, T.; Tajima, F.; Ito, M.; Shibukawa, S. Effects of Slot Combination on Acoustic Noise from Induction Motors. IEEE Trans. Magn. 1997, 33, 2101–2104. [Google Scholar] [CrossRef]
- Zhang, D.; Park, C.S.; Koh, C.S. A New Optimal Design Method of Rotor Slot of Three-Phase Squirrel Cage Induction Motor for NEMA Class D Speed-Torque Characteristic Using Multi-Objective Optimization Algorithm. IEEE Trans. Magn. 2012, 48, 879–882. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variables | Value | Unit |
|---|---|---|
| Rated Power | 7500 | W |
| Rated Torque | 39.8 | Nm |
| Number of Poles | 4 | - |
| Number of Slots | 36 | - |
| Stator Outer | 195 | mm |
| Rotor Inner | 116 | mm |
| Poles | Number of Stator Slots | Number of Rotor Bars |
|---|---|---|
| 2 | 24 | 18, 20, 22, 28, 30, 33, 34 |
| 36 | 25, 27, 28, 29, 30, 43 | |
| 48 | 30, 37, 39, 40, 41 | |
| 4 | 24 | 16, 18, 20, 30, 33, 34, 35, 36 |
| 36 | 28, 30, 32, 33, 34, 45, 48 | |
| 48 | 36, 40, 44, 57, 59 | |
| 72 | 42, 48, 54, 56, 60, 61, 62, 68, 76 | |
| 6 | 24 | 20, 22, 28, 44, 47, 49 |
| 36 | 34, 36, 38, 40, 44, 46 | |
| 48 | 44, 46, 50, 60, 61, 62, 82, 83 |
| Bar Size (mm) | Torque (Nm) | Speed (r/min) | Current (Arms) | BarLoss (W) | Copper Loss (W) | Efficiency (%) | Power Factor (%) |
|---|---|---|---|---|---|---|---|
| 0.5 | 39.23 | 1800 | 21.32 | 127.41 | 294.6 | 91.45 | 60.84 |
| 1 | 39.65 | 1800 | 21.56 | 137.59 | 301.22 | 91.35 | 60.36 |
| 1.5 | 39.66 | 1800 | 22.19 | 115.2 | 319.01 | 91.43 | 57.5 |
| 2 | 39.66 | 1800 | 26.1 | 81.14 | 441.3 | 90.46 | 54.05 |
| 2.5 | 39.64 | 1800 | 36.6 | 101.43 | 867.71 | 85.77 | 39.4 |
| 3 | 39.56 | 1800 | 55.07 | 212.1 | 1965.27 | 75.19 | 31.18 |
| 3.5 | 39.59 | 1800 | 78.47 | 508.24 | 3990.21 | 60.92 | 27.65 |
| Slot Size (mm) | Torque (Nm) | Speed (r/min) | Current (Arms) | BarLoss (W) | Copper Loss (W) | Efficiency (%) | Power Factor (%) |
|---|---|---|---|---|---|---|---|
| 0.5 | 33.61 | 868.4 | 116.22 | 6094.63 | 8754.74 | 16.35 | 34.37 |
| 1 | 39.23 | 948.4 | 125.57 | 9122.68 | 10,217.42 | 16.37 | 40.24 |
| 1.5 | 39.54 | 1491.7 | 115.3 | 3646.49 | 8613.56 | 32.84 | 36.73 |
| 2 | 39.66 | 1800 | 26.1 | 81.11 | 441.31 | 90.46 | 52.57 |
| 2.5 | 39.64 | 1800 | 36.6 | 101.42 | 867.84 | 85.77 | 39.40 |
| 3 | 39.57 | 1800 | 55.08 | 211.9 | 1965.85 | 75.19 | 31.17 |
| 3.5 | 39.55 | 1800 | 78.5 | 508.19 | 3993 | 60.88 | 27.62 |
| Design Objective Functions | Design Variables (Level) |
|---|---|
| Max (Efficiency) and Max (Power Factor) | 1. Permanent Magnet Position (5 Level) 2. Permanent Magnet Thickness (5 Level) 3. Permanent Magnet Width (5 Level) 4. Rib Thickness (5 Level) 5. Rib Width (5 Level) |
| Turns | Torque (Nm) | Torque Ripple (%) | Speed (rpm) | Current (Arms) | Efficiency (%) | Power Factor (%) |
|---|---|---|---|---|---|---|
| 12 | 39.6 | 43.33 | 1800 | 26.2 | 89.49 | 49.08 |
| 14 | 39.82 | 48.62 | 1800 | 12.89 | 94.22 | 95.02 |
| 16 | 39.89 | 53.22 | 1800 | 12.32 | 94.16 | 99.66 |
| 18 | 39.87 | 66.21 | 1800 | 12.77 | 93.26 | 96.85 |
| 20 | 24.28 | 1808.25 | 962.23 | 62.60 | 12.26 | 60.86 |
| Variables | Value | Unit |
|---|---|---|
| Stator resistance | 0.282 | W |
| Back EMF constant | 4.54 | V·s |
| d-axis inductance () | 16.31 | mH |
| q-axis inductance () | 34.59 | mH |
| The moment of inertia () | 0.022 | kg·m2/s |
| Torque (Nm) | Speed (rpm) | Voltage (Vrms) | Current (Arms) | Copper Loss (W) | Output (W) | Efficiency (%) | |
|---|---|---|---|---|---|---|---|
| Analysis | 39.82 | 1800 | 220 | 12.89 | 46.85 | 7507.7 | 94.22 |
| Test | 39.79 | 1800 | 219.05 | 13.6 | 52.16 | 7501.2 | 94.1 |
| Variables | Value | Unit |
|---|---|---|
| Noise | 71.5 | dB |
| Vibration | 1.0 | mm/s |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Park, H.-J.; Hong, H.-B.; Lee, K.-D. A Study on a Design Considering the Transient State of a Line-Start Permanent Magnet Synchronous Motor Satisfying the Requirements of the IE4 Efficiency Class. Energies 2022, 15, 9644. https://doi.org/10.3390/en15249644
Park H-J, Hong H-B, Lee K-D. A Study on a Design Considering the Transient State of a Line-Start Permanent Magnet Synchronous Motor Satisfying the Requirements of the IE4 Efficiency Class. Energies. 2022; 15(24):9644. https://doi.org/10.3390/en15249644
Chicago/Turabian StylePark, Hyun-Jong, Hyeon-Bin Hong, and Ki-Doek Lee. 2022. "A Study on a Design Considering the Transient State of a Line-Start Permanent Magnet Synchronous Motor Satisfying the Requirements of the IE4 Efficiency Class" Energies 15, no. 24: 9644. https://doi.org/10.3390/en15249644