

Different Topologies of Electrical Machines, Storage Systems, and Power Electronic Converters and Their Control for Battery Electric Vehicles—A Technical Review

Abstract
:1. Introduction
2. Electrical Machines (EMs)
2.1. EMs Control Technologies
2.1.1. FOC
2.1.2. DTC
2.1.3. Model Predictive Control (MPC)
2.1.4. Fault Tolerant Control (FTC)
2.2. Induction Machine (IM)
2.3. Permanent Magnet (PM) Machines
2.4. Switched Reluctance Machine (SRM)
2.5. Synchronous Reluctance Machine (SyncRM)
2.6. Brushless DC Machine (BLDCM)
3. Energy Storage Systems (ESSs)
3.1. Battery
3.2. Super-Capacitor/Ultra-Capacitor
3.3. Fuel Cell
3.4. Flywheel Energy Storage System
3.5. Hybrid Energy Storage System (HESS)
4. Power Converter Topologies
4.1. Charger
4.1.1. DC-DC Converters
Boost Converter
Buck Converter
Buck-Boost Converter
4.1.2. AC-DC Converters
4.2. Machine Driver: Inverter
4.2.1. Basic Level Inverter
4.2.2. Multilevel Inverter
4.2.3. Dual Inverter
4.3. Active HESS Energy Manager
5. Selection of Sub-Systems
5.1. Four-Wheeler
5.2. Three-Wheeler
5.3. In-Wheel Motor EV
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Needell, Z.A.; McNerney, J.; Chang, M.T.; Trancik, J.E. Potential for widespread electrification of personal vehicle travel in the United States. Nat. Energy 2016, 1, 16112. [Google Scholar] [CrossRef] [Green Version]
- Rind, S.J.; Ren, Y.; Hu, Y.; Wang, J.; Jiang, L. Configurations and control of traction motors for electric vehicles: A review. Chin. J. Electr. Eng. 2017, 3, 1–17. [Google Scholar] [CrossRef]
- Spichartz, P.; Bokker, T.; Sourkounis, C. Comparison of electric vehicles with single drive And Four Wheel Drive System Concerning Regenerative Braking. In Proceedings of the 2017 Twelfth International Conference on Ecological Vehicles and Renewable Energies (EVER), Monte Carlo, Monaco, 11–13 April 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–7. [Google Scholar]
- Buekers, J.; Van Holderbeke, M.; Bierkens, J.; Panis, L.I. Health and environmental benefits related to electric vehicle introduction in EU countries. Transp. Res. Part D Transp. Environ. 2014, 33, 26–38. [Google Scholar] [CrossRef]
- Bilgin, B.; Magne, P.; Malysz, P.; Yang, Y.; Pantelic, V.; Preindl, M.; Korobkine, A.; Jiang, W.; Lawford, M.; Emadi, A. Making the Case for Electrified Transportation. IEEE Trans. Transp. Electrif. 2015, 1, 4–17. [Google Scholar] [CrossRef]
- Broadbent, G.H.; Metternicht, G.; Drozdzewski, D. An Analysis of Consumer Incentives in Support of Electric Vehicle Uptake: An Australian Case Study. World Electr. Veh. J. 2019, 10, 11. [Google Scholar] [CrossRef] [Green Version]
- Rajashekara, K. Present Status and Future Trends in Electric Vehicle Propulsion Technologies. IEEE J. Emerg. Sel. Top. Power Electron. 2013, 1, 3–10. [Google Scholar] [CrossRef]
- Liu, C.; Chau, K.T.; Lee, C.H.T.; Song, Z. A Critical Review of Advanced Electric Machines and Control Strategies for Electric Vehicles. Proc. IEEE 2021, 109, 1004–1028. [Google Scholar] [CrossRef]
- Emadi, A.; Lee, Y.J.; Rajashekara, K. Power Electronics and Motor Drives in Electric, Hybrid Electric, and Plug-In Hybrid Electric Vehicles. IEEE Trans. Ind. Electron. 2008, 55, 2237–2245. [Google Scholar] [CrossRef]
- De Klerk, M.L.; Saha, A.K. A Comprehensive Review of Advanced Traction Motor Control Techniques Suitable for Electric Vehicle Applications. IEEE Access 2021, 9, 125080–125108. [Google Scholar] [CrossRef]
- Kamrul, M.; Habib, A.K.M.A.; Motakabber, S.M.A.; Islam, S. Review of Electric Vehicle Energy Storage and Management System: Standards, Issues, and Challenges. J. Energy Storage 2021, 41, 102940. [Google Scholar]
- Wassiliadis, N.; Schneider, J.; Frank, A.; Wildfeuer, L.; Lin, X.; Jossen, A.; Lienkamp, M. Review of fast charging strategies for lithium-ion battery systems and their applicability for battery electric vehicles. J. Energy Storage 2021, 44, 103306. [Google Scholar] [CrossRef]
- Yilmaz, M.; Krein, P.T. Review of Battery Charger Topologies, Charging Power Levels, and Infrastructure for Plug-In Electric and Hybrid Vehicles. IEEE Trans. Power Electron. 2013, 28, 2151–2169. [Google Scholar] [CrossRef]
- Bu, F.; Liu, H.; Huang, W.; Hu, Y.; Degano, M.; Gerada, C.; Rajashekara, K. Induction-Machine-Based Starter/Generator Systems: Techniques, Developments, and Advances. IEEE Ind. Electron. Mag. 2020, 14, 4–19. [Google Scholar] [CrossRef]
- Rivière, N.; Volpe, G.; Leonardo, L. Di Design Analysis of a High Speed Copper Rotor Induction Motor for a Traction Application. In Proceedings of the 2019 IEEE International Electric Machines & Drives Conference (IEMDC), San Diego, CA, USA, 12–15 May 2019; pp. 1024–1031. [Google Scholar]
- Saad, K.; Abdellah, K.; Ali, T.B. Advanced fault-tolerant control of multiphase induction motor drives in EV. In Proceedings of the 2019 1st International Conference on Sustainable Renewable Energy Systems and Applications (ICSRESA), Tebessa, Algeria, 4–5 December 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–5. [Google Scholar]
- Quintero-Manríquez, E.; Sanchez, E.N.; Antonio-Toledo, M.E.; Muñoz, F. Neural control of an induction motor with regenerative braking as electric vehicle architecture. Eng. Appl. Artif. Intell. 2021, 104, 104275. [Google Scholar] [CrossRef]
- Han, P.; Cheng, M.; Chen, Z. Dual-Electrical-Port Control of Cascaded Doubly-Fed Induction Machine for EV/HEV Applications. IEEE Trans. Ind. Appl. 2016, 53, 1390–1398. [Google Scholar] [CrossRef]
- Su, J.; Gao, R.; Husain, I. Model Predictive Control Based Field-Weakening Strategy for Traction EV Used Induction Motor. IEEE Trans. Ind. Appl. 2017, 54, 2295–2305. [Google Scholar] [CrossRef]
- Tabbache, B.; Rizoug, N.; El, M.; Benbouzid, H.; Member, S. A Control Reconfiguration Strategy for Post-Sensor FTC in Induction Motor-Based EVs. IEEE Trans. Veh. Technol. 2013, 62, 965–971. [Google Scholar] [CrossRef] [Green Version]
- Yu, J.; Pei, W.; Zhang, C. A Loss-Minimization Port-Controlled Hamilton Scheme of Induction Motor for Electric Vehicles. IEEE/ASME Trans. Mechatron. 2014, 20, 2645–2653. [Google Scholar] [CrossRef]
- Attaianese, C.; Di Monaco, M.; Spina, I.; Tomasso, G. A Variational Approach to MTPA Control of Induction Motor for EVs Range Optimization. IEEE Trans. Veh. Technol. 2020, 69, 7014–7025. [Google Scholar] [CrossRef]
- Haddoun, A.; El, M.; Benbouzid, H.; Member, S.; Diallo, D.; Member, S.; Abdessemed, R.; Ghouili, J.; Srairi, K. A Loss-Minimization DTC Scheme for EV Induction Motors. IEEE Trans. Veh. Technol. 2007, 56, 81–88. [Google Scholar] [CrossRef] [Green Version]
- Naganathan, P.; Srinivas, S. MTPA Associated DTC Methodologies for Enhanced Performance and Energy Savings in Electric Vehicle Mobility With Induction Motor Drive. IEEE Trans. Transp. Electrif. 2022, 8, 1853–1862. [Google Scholar] [CrossRef]
- Quintero-manríquez, E.; Sanchez, E.N. Real-Time Direct Field-Oriented and Second Order Sliding Mode Controllers of Induction Motor for Electric Vehicles Applications. In Proceedings of the 2015 10th System of Systems Engineering Conference, San Antonio, TX, USA, 17–20 May 2015; pp. 220–225. [Google Scholar]
- Iffouzar, K.; Amrouche, B.; Cherif, T.O.; Benkhoris, M.-F.; Aouzellag, D.; Ghedamsi, K. Improved direct field oriented control of multiphase induction motor used in hybrid electric vehicle application. Int. J. Hydrog. Energy 2017, 42, 19296–19308. [Google Scholar] [CrossRef]
- Zhang, X. Sensorless Induction Motor Drive Using Indirect Vector Controller and Sliding-Mode Observer for Electric Vehicles. IEEE Trans. Veh. Technol. 2013, 62, 3010–3018. [Google Scholar] [CrossRef]
- Muduli, U.R.; Beig, A.R.; Behera, R.K.; Al Jaafari, K.; Alsawalhi, J.Y. Predictive Control With Battery Power Sharing Scheme for Dual Open-End-Winding Induction Motor Based Four-Wheel Drive Electric Vehicle. IEEE Trans. Ind. Electron. 2022, 69, 5557–5568. [Google Scholar] [CrossRef]
- Lu, C.; Ferrari, S.; Pellegrino, G. Two Design Procedures for PM Synchronous Machines for Electric Powertrains. IEEE Trans. Transp. Electrif. 2017, 3, 98–107. [Google Scholar] [CrossRef] [Green Version]
- Chen, Z.; Li, G. A V Type Permanent Magnet Motor Simulation Analysis and Prototype Test for Electric Vehicle. IEEE Access 2019, 7, 174839–174846. [Google Scholar] [CrossRef]
- Cao, L.; Member, S.; Chau, K.T.; Lee, C.H.T.; Member, S.; Wang, H.; Member, S. A Double-Rotor Flux-Switching. IEEE Trans. Ind. Electron. 2021, 68, 1004–1015. [Google Scholar] [CrossRef]
- Ahn, K.; Bayrak, A.E.; Papalambros, P.Y. Electric Vehicle Design Optimization: Integration of a High-Fidelity Interior-Permanent-Magnet Motor Model. IEEE Trans. Veh. Technol. 2015, 64, 3870–3877. [Google Scholar] [CrossRef]
- Miyama, Y.; Hazeyama, M.; Hanioka, S.; Watanabe, N.; Daikoku, A.; Inoue, M. PWM Carrier Harmonic Iron Loss Reduction Technique of Permanent-Magnet Motors for Electric Vehicles. IEEE Trans. Ind. Appl. 2016, 52, 2865–2871. [Google Scholar] [CrossRef]
- Lu, Y.; Jiang, Z.; Chen, C.; Zhuang, Y. Energy efficiency optimization of field-oriented control for PMSM in all electric system. Sustain. Energy Technol. Assess. 2021, 48, 101575. [Google Scholar] [CrossRef]
- Ramesh, P.; Umavathi, M.; Bharatiraja, C.; Ramanathan, G.; Athikkal, S. Materials Today: Proceedings Development of a PMSM Motor Field-Oriented Control Algorithm for Electrical Vehicles. Mater. Today Proc. 2022, 65, 176–187. [Google Scholar] [CrossRef]
- Zhang, Z.; Ma, R.; Wang, L.; Zhang, J. Novel PMSM Control for Anti-Lock Braking Considering Transmission Properties of the Electric Vehicle. IEEE Trans. Veh. Technol. 2018, 67, 10378–10386. [Google Scholar] [CrossRef]
- Wei, J.; Member, S.; Kong, X.; Tao, W.; Zhang, Z.; Member, S.; Zhou, B. The Torque Ripple Optimization of Open-Winding Permanent Magnet Synchronous Motor with Direct Ratio Range. IEEE Trans. Power Electron. 2022, 37, 7156–7168. [Google Scholar] [CrossRef]
- Arias, A.; Ibarra, E.; Trancho, E.; Griñó, R.; Kortabarria, I.; Caum, J. Comprehensive high speed automotive SM-PMSM torque control stability analysis including novel control approach. Int. J. Electr. Power Energy Syst. 2020, 109, 423–433. [Google Scholar] [CrossRef]
- Li, L.; Li, X.; Wang, X.; Song, J.; He, K.; Li, C. Analysis of downshift’s improvement to energy efficiency of an electric vehicle during regenerative braking. Appl. Energy 2016, 176, 125–137. [Google Scholar] [CrossRef]
- Choo, K.-M.; Won, C.-Y. Design and Analysis of Electrical Braking Torque Limit Trajectory for Regenerative Braking in Electric Vehicles with PMSM Drive Systems. IEEE Trans. Power Electron. 2020, 35, 13308–13321. [Google Scholar] [CrossRef]
- Itani, K.; De Bernardinis, A.; Khatir, Z.; Jammal, A.; Oueidat, M. Regenerative Braking Modeling, Control, and Simulation of a Hybrid Energy Storage System for an Electric Vehicle in Extreme Conditions. IEEE Trans. Transp. Electrif. 2016, 2, 465–479. [Google Scholar] [CrossRef]
- Fajri, P.; Lee, S.; Member, S.; Anand, V.; Prabhala, K.; Member, S.; Ferdowsi, M. Modeling and Integration of Electric Vehicle Regenerative and Friction Braking for Motor/Dynamometer Test Bench Emulation. IEEE Trans. Veh. Technol. 2016, 65, 4264–4273. [Google Scholar] [CrossRef]
- Qiu, C.; Wang, G. New evaluation methodology of regenerative braking contribution to energy efficiency improvement of electric vehicles. Energy Convers. Manag. 2016, 119, 389–398. [Google Scholar] [CrossRef]
- Gao, S.; Wei, Y.; Zhang, D.; Qi, H.; Wei, Y.; Yang, Z. Model-Free Hybrid Parallel Predictive Speed Control Based On Ultralocal Model of PMSM for Electric Vehicles. IEEE Trans. Ind. Electron. 2022, 69, 9739–9748. [Google Scholar] [CrossRef]
- Meesala, E.K.; Athikkal, S.; Prasad, A. Modified Direct Torque Control of PMSM Drive for Electric Vehicle Application. In Proceedings of the 2021 IEEE Madras Section Conference, Chennai, India, 27–28 August 2021. [Google Scholar]
- Sreejith, R. Intelligent Nonlinear Sensorless Predictive Field Oriented Control of PMSM Drive for Three Wheeler Hybrid Solar PV-Battery Electric Vehicle. In Proceedings of the 2019 IEEE Transportation Electrification Conference and Expo (ITEC), Detroit, MI, USA, 19–21 June 2019. [Google Scholar]
- Li, G.; Hu, J.; Li, Y.; Zhu, J. An Improved Model Predictive Direct Torque Control Strategy for Reducing Harmonic Currents and Torque Ripples of Five-Phase Permanent Magnet Synchronous Motors. IEEE Trans. Ind. Electron. 2019, 66, 5820–5829. [Google Scholar] [CrossRef]
- Abdelrauf, A.A.; Galea, M. Model Predictive Control Based PID Controller for PMSM for Propulsion Systems. In Proceedings of the 2018 IEEE International Conference on Electrical Systems for Aircraft, Railway, Ship Propulsion and Road Vehicles & International Transportation Electrification Conference (ESARS-ITEC), Nottingham, UK, 7–9 November 2018; pp. 7–13. [Google Scholar]
- Zhu, J.; Cheng, K.W.E.; Xue, X.; Zou, Y. Design of a New Enhanced Torque In-Wheel Switched Reluctance Motor With Divided Teeth for Electric Vehicles. IEEE Trans. Magn. 2017, 53, 1–4. [Google Scholar] [CrossRef]
- Chen, H.; Yan, W.; Gu, J.J.; Sun, M. Multiobjective Optimization Design of a Switched Reluctance Motor for Low-Speed Electric Vehicles With a Taguchi–CSO Algorithm. IEEE/ASME Trans. Mechatron. 2018, 23, 1762–1774. [Google Scholar] [CrossRef]
- Inderka, R.B.; Menne, M.; Doncker, R.W.A.A. De Vehicle Applications. IEEE Trans. Ind. Electron. 2002, 49, 48–53. [Google Scholar] [CrossRef]
- Sun, X.; Diao, K.; Lei, G.; Guo, Y.; Zhu, J. Direct Torque Control Based on a Fast Modeling Method for a Segmented-Rotor Switched Reluctance Motor in HEV Application. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 9, 232–241. [Google Scholar] [CrossRef]
- Schulz, S.; Rahman, K. High-performance digital pi current regulator for ev switched reluctance motor drives. IEEE Trans. Ind. Appl. 2003, 39, 1118–1126. [Google Scholar] [CrossRef]
- Zhu, Y.; Wu, H.; Zhen, C. Regenerative braking control under sliding braking condition of electric vehicles with switched reluctance motor drive system. Energy 2021, 230, 120901. [Google Scholar] [CrossRef]
- Xue, X.D.; Cheng, K.W.E.; Lin, J.K.; Zhang, Z.; Luk, K.F.; Ng, T.W.; Cheung, N.C. Optimal Control Method of Motoring Operation for SRM Drives in Electric Vehicles. IEEE Trans. Veh. Technol. 2010, 59, 1191–1204. [Google Scholar] [CrossRef]
- Villet, W.T.; Member, S.; Kamper, M.J.; Member, S. Variable-Gear EV Reluctance Synchronous Motor Drives—An Evaluation of Rotor Structures for Position-Sensorless Control. IEEE Trans. Ind. Electron. 2014, 61, 5732–5740. [Google Scholar] [CrossRef]
- Bianchi, N.; Bolognani, S.; Carraro, E.; Castiello, M.; Fornasiero, E. Reluctance Motors. IEEE Trans. Ind. Appl. 2016, 52, 4762–4769. [Google Scholar] [CrossRef]
- Taghavi, S.; Pillay, P. A Sizing Methodology of the Synchronous Reluctance Motor for Traction Applications. IEEE J. Emerg. Sel. Top. Power Electron. 2014, 2, 329–340. [Google Scholar] [CrossRef]
- Boldea, I.; Pitic, C.; Lascu, C.; Andreescu, G.-D.; Tutelea, L.; Blaabjerg, F.; Sandholdt, P. DTFC-SVM motion-sensorless control of a PM-assisted reluctance synchronous machine as starter-alternator for hybrid electric vehicles. IEEE Trans. Power Electron. 2006, 21, 711–719. [Google Scholar] [CrossRef]
- Niazi, P.; Toliyat, H.A.; Member, S.; Goodarzi, A.; Member, S.; Recently, A. Robust Maximum Torque per Ampere (MTPA) Control of PM-Assisted SynRM for Traction Applications. IEEE Trans. Veh. Technol. 2007, 56, 1538–1545. [Google Scholar] [CrossRef]
- Damiano, A.; Floris, A.; Fois, G.; Marongiu, I.; Porru, M.; Serpi, A. Design of a High-Speed Ferrite-Based Brushless DC Machine for Electric Vehicles. IEEE Trans. Ind. Appl. 2017, 53, 4279–4287. [Google Scholar] [CrossRef] [Green Version]
- Naseri, F.; Farjah, E.; Ghanbari, T. An Efficient Regenerative Braking System Based on Battery/Supercapacitor for Electric, Hybrid and Plug-In Hybrid Electric Vehicles with BLDC Motor. IEEE Trans. Veh. Technol. 2016, 66, 3724–3738. [Google Scholar] [CrossRef]
- Nian, X.; Peng, F.; Zhang, H. Regenerative Braking System of Electric Vehicle Driven by Brushless DC Motor. IEEE Trans. Ind. Electron. 2014, 61, 5798–5808. [Google Scholar] [CrossRef]
- Pan, C.; Chen, L.; Chen, L.; Jiang, H.; Li, Z.; Wang, S. Research on motor rotational speed measurement in regenerative braking system of electric vehicle. Mech. Syst. Signal Process. 2016, 66–67, 829–839. [Google Scholar] [CrossRef]
- Olson, J.B.; Sexton, E.D. Operation of Lead-Acid Batteries for HEV Applications. In Proceedings of the Fifteenth Annual Battery Conference on Applications and Advances, Long Beach, CA, USA, 11–14 January 2000; pp. 205–210. [Google Scholar]
- Caumont, O.; Le Moigne, P.; Rombaut, C.; Muneret, X.; Lenain, P. Energy gauge for lead-acid batteries in electric vehicles. IEEE Trans. Energy Convers. 2000, 15, 354–360. [Google Scholar] [CrossRef]
- Weiss, H.; Winkler, T.; Ziegerhofer, H. Large Lithium-Ion Battery-Powered Electric Vehicles—From Idea to Reality; IEEE: New York, NY, USA, 2018. [Google Scholar]
- Xiao, L.; Haitao, X.; Dgguhvv, E. Cycle life prediction method of lithium ion batteries for new energy electric vehicles. In Proceedings of the 2021 International Conference of Social Computing and Digital Economy (ICSCDE), Chongqing, China, 28–29 August 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 108–112. [Google Scholar]
- Manzoni, R. Sodium Nickel Chloride Batteries in Transportation Applications. In Proceedings of the 2015 International Conference on Electrical Systems for Aircraft, Railway, Ship Propulsion and Road Vehicles (ESARS), Aachen, Germany, 3–5 March 2015; pp. 1–6. [Google Scholar]
- Reisner, D.; Klein, M. Bipolar nickel-metal hydride battery for hybrid vehicles. IEEE Aerosp. Electron. Syst. Mag. 1994, 9, 24–28. [Google Scholar] [CrossRef]
- Jiayuan, W.; Zechang, S.; Xuezhe, W.; Basics, A. Performance and Characteristic Research in LiFePO4 Battery for Electric Vehicle Applications. In Proceedings of the 2009 IEEE Vehicle Power and Propulsion Conference, Dearborn, MI, USA, 7–10 September 2009; pp. 1657–1661. [Google Scholar]
- Disosway, M. Development of High Power Nickel-Cadmium Batteries for Hybrid Vehicles. In Proceedings of the Thirteenth Annual Battery Conference on Applications and Advances; Long Beach, CA, USA, 16 January 1998, pp. 19–23.
- Squiller, D.; Brody, R.; Centre, T.; Diego, S. Nickel-Zinc Batteries for Hybrid Electric Vehicles and Stationary Storage. Nano Sci. Technol. Inst. 2011, 1, 690–693. [Google Scholar]
- Mendoza-Torres, A.; Visairo, N.; Nuñez, C.; Armenta, J.; Rodríguez, E.; Cervantes, I. Switching rule for a bidirectional DC/DC converter in an electric vehicle. Control Eng. Pract. 2019, 82, 108–117. [Google Scholar] [CrossRef]
- Akar, F.; Tavlasoglu, Y.; Ugur, E.; Vural, B.; Aksoy, I. A Bidirectional Nonisolated Multi-Input DC–DC Converter for Hybrid Energy Storage Systems in Electric Vehicles. IEEE Trans. Veh. Technol. 2016, 65, 7944–7955. [Google Scholar] [CrossRef]
- Huangfu, Y.; Guo, L.; Ma, R.; Gao, F. An Advanced Robust Noise Suppression Control of Bidirectional DC–DC Converter for Fuel Cell Electric Vehicle. IEEE Trans. Transp. Electrif. 2019, 5, 1268–1278. [Google Scholar] [CrossRef]
- Zhu, T.; Wills, R.G.; Lot, R.; Kong, X.; Yan, X. Optimal sizing and sensitivity analysis of a battery-supercapacitor energy storage system for electric vehicles. Energy 2021, 221, 119851. [Google Scholar] [CrossRef]
- Zhu, T.; Lot, R.; Wills, R.G.; Yan, X. Sizing a battery-supercapacitor energy storage system with battery degradation consideration for high-performance electric vehicles. Energy 2020, 208, 118336. [Google Scholar] [CrossRef]
- Zhu, T.; Wills, R.G.; Lot, R.; Ruan, H.; Jiang, Z. Adaptive energy management of a battery-supercapacitor energy storage system for electric vehicles based on flexible perception and neural network fitting. Appl. Energy 2021, 292, 116932. [Google Scholar] [CrossRef]
- Zhang, Q.; Wang, L.; Li, G.; Liu, Y. A real-time energy management control strategy for battery and supercapacitor hybrid energy storage systems of pure electric vehicles. J. Energy Storage 2020, 31, 101721. [Google Scholar] [CrossRef]
- Choi, M.-E.; Lee, J.-S.; Seo, S.-W. Real-Time Optimization for Power Management Systems of a Battery/Supercapacitor Hybrid Energy Storage System in Electric Vehicles. IEEE Trans. Veh. Technol. 2014, 63, 3600–3611. [Google Scholar] [CrossRef]
- Snoussi, J.; Ben Elghali, S.; Benbouzid, M.; Mimouni, M.F. Optimal Sizing of Energy Storage Systems Using Frequency-Separation-Based Energy Management for Fuel Cell Hybrid Electric Vehicles. IEEE Trans. Veh. Technol. 2018, 67, 9337–9346. [Google Scholar] [CrossRef]
- Dusmez, S.; Khaligh, A. A Supervisory Power-Splitting Approach for a New Ultracapacitor—Battery Vehicle Deploying Two. IEEE Trans. Ind. Inform. 2014, 10, 1960–1971. [Google Scholar] [CrossRef]
- Zhang, L.; Hu, X.; Wang, Z.; Sun, F.; Deng, J.; Dorrell, D.G. Multiobjective Optimal Sizing of Hybrid Energy Storage System for Electric Vehicles. IEEE Trans. Veh. Technol. 2018, 67, 1027–1035. [Google Scholar] [CrossRef]
- Nahavandi, A.; Hagh, M.T.; Bagher, M.; Sharifian, B.; Danyali, S. A Nonisolated Multiinput Multioutput DC–DC Boost. IEEE Trans. Power Electron. 2015, 30, 1818–1835. [Google Scholar] [CrossRef]
- Shilaja, C.; Kiran, S.R.; Murali, M.; Moinuddin, S.K.; Navani, K.; Yousuf, S.; Harshith, M. Design and analysis of global optimization methods for proton exchange membrane fuel cell powered electric vehicle system with single switch DC-DC converter. Mater. Today Proc. 2022, 52, 2057–2064. [Google Scholar] [CrossRef]
- Devi, P.V.; Immanuel, D.G. Materials Today: Proceedings DC-DC Converter in Electric Vehicles Using Smart Technology to Reduce Overall Ripple Current. Mater. Today Proc. 2020. [Google Scholar] [CrossRef]
- Rajalashmi, K.; Vignesh, S.; Kaviyadevi, R.S. Materials Today: Proceedings Experimental Analysis of Super Boost Converter for Solar Motorized Electric Vehicle System. Mater. Today Proc. 2022, 66, 1074–1081. [Google Scholar] [CrossRef]
- Hong, T.; Geng, Z.; Qi, K.; Zhao, X.; Ambrosio, J.; Gu, D. A Wide Range Unidirectional Isolated DC-DC Converter for Fuel Cell Electric Vehicles. IEEE Trans. Ind. Electron. 2021, 68, 5932–5943. [Google Scholar] [CrossRef]
- Chen, G.; Deng, Y.; Dong, J.; Hu, Y.; Jiang, L.; He, X. Integrated Multiple-Output Synchronous Buck Converter for Electric Vehicle Power Supply. IEEE Trans. Veh. Technol. 2017, 66, 5752–5761. [Google Scholar] [CrossRef]
- Ramesh, M.; Mallikarjuna, B.; Rajasekar, T. A Novel Investigation on Single-Input Three-Output Dc-Dc Buck Converter for Electrical Vehicles. In Proceedings of the Proceedings of the 7th International Conference on Electrical Energy Systems (ICEES), Chennai, India, 11–13 February 2021; pp. 141–146. [Google Scholar]
- Khan, M.A.; Member, S.; Ahmed, A.; Member, S. Performance Analysis of Bidirectional DC–DC Converters for Electric Vehicles. IEEE Trans. Ind. Appl. 2015, 51, 3442–3452. [Google Scholar] [CrossRef]
- Beraki, M.W.; Member, S.; Trov, P.F.; Perdig, M.S. Variable Inductor Based Bidirectional DC–DC Converter for Electric Vehicles. IEEE Trans. Veh. Technol. 2017, 66, 8764–8772. [Google Scholar] [CrossRef]
- Joshi, M.C. Modeling and Control of Bidirectional DC-DC Converter Fed PMDC Motor for Electric Vehicles. In Proceedings of the India Conference (INDICON), Mumbai, India, 13–15 December 2013; pp. 1–6. [Google Scholar] [CrossRef]
- Turksoy, O.; Yilmaz, U.; Teke, A. Ef Fi Cient AC-DC Power Factor Corrected Boost Converter Design for Battery Charger in Electric Vehicles. Energy 2021, 221, 119765. [Google Scholar] [CrossRef]
- Singh, A.K.; Mishra, A.K.; Gupta, K.K.; Bhatnagar, P.; Member, S.; Kim, T.; Member, S. An Integrated Converter with Reduced Components for Electric Vehicles Utilizing Solar and Grid Power Sources. IEEE Trans. Transp. Electrif. 2020, 6, 439–452. [Google Scholar] [CrossRef]
- Raherimihaja, H.J.; Zhang, Q.; Na, T.; Shao, M.; Wang, J. A Three-Phase Integrated Battery Charger for EVs Based on Six-Phase Open-End Winding Machine. IEEE Trans. Power Electron. 2020, 35, 12122–12132. [Google Scholar] [CrossRef]
- Lee, J.-Y. An EL Capacitorless EV On-Board Charger Using Harmonic Modulation Technique. IEEE Trans. Ind. Electron. 2014, 61, 1784–1787. [Google Scholar] [CrossRef]
- Kushwaha, R.; Singh, B. Power Factor Improvement in Modified Bridgeless Landsman Converter Fed EV Battery Charger. IEEE Trans. Veh. Technol. 2019, 68, 3325–3336. [Google Scholar] [CrossRef]
- Kumar, K.; Santra, S.B. Performance Analysis of a Three-Phase Propulsion Inverter for Electric Vehicles Using GaN Semiconductor Devices. IEEE Trans. Ind. Appl. 2018, 54, 6247–6257. [Google Scholar] [CrossRef]
- Battiston, A.; Miliani, E.-H.; Pierfederici, S.; Meibody-Tabar, F. Efficiency Improvement of a Quasi-Z-Source Inverter-Fed Permanent-Magnet Synchronous Machine-Based Electric Vehicle. IEEE Trans. Transp. Electrif. 2016, 2, 14–23. [Google Scholar] [CrossRef]
- Akhtar, M.J.; Behera, R.K. Space Vector Modulation for Distributed Inverter-Fed Induction Motor Drive for Electric Vehicle Application. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 9, 379–389. [Google Scholar] [CrossRef]
- Ding, X.; Du, M.; Duan, C.; Guo, H.; Xiong, R.; Xu, J.; Cheng, J.; Chi, P.; Member, S. Analytical and Experimental Evaluation of SiC-Inverter Nonlinearities for Traction Drives Used in Electric Vehicles. IEEE Trans. Veh. Technol. 2018, 67, 146–159. [Google Scholar] [CrossRef] [Green Version]
- Choudhury, A.; Pillay, P.; Williamson, S.S. DC-Link Voltage Balancing for a Three-Level Electric Vehicle Traction Inverter Using an Innovative Switching Sequence Control Scheme. IEEE J. Emerg. Sel. Top. Power Electron. 2014, 2, 296–307. [Google Scholar] [CrossRef]
- Du, Z.; Ozpineci, B.; Member, S.; Tolbert, L.M.; Member, S.; Chiasson, J.N.; Member, S. DC–AC Cascaded H-Bridge Multilevel Boost Inverter with No Inductors for Electric/Hybrid Electric Vehicle Applications. IEEE Trans. Ind. Appl. 2009, 45, 963–970. [Google Scholar] [CrossRef]
- Zhang, Y.; Chen, G.; Hu, Y.; Gong, C.; Wang, Y. Cascaded multilevel inverter based power and signal multiplex transmission for electric vehicles. CES Trans. Electr. Mach. Syst. 2020, 4, 123–129. [Google Scholar] [CrossRef]
- Pereda, J.; Member, S.; Dixon, J.; Member, S.; Cascaded, A.; Chb, H. 23-Level Inverter for Electric Vehicles Using a Single Battery Pack and Series Active Filters. IEEE Trans. Veh. Technol. 2012, 61, 1043–1051. [Google Scholar] [CrossRef]
- Stöttner, J.; Hanzl, C.; Endisch, C. Extensive investigation of symmetrical and asymmetrical cascaded multilevel inverters for electric vehicle applications. Electr. Power Syst. Res. 2022, 209, 108009. [Google Scholar] [CrossRef]
- Dehghani, A.; El, K.; Drissi, K.; Pasquier, C. Angular Modulation of Dual-Inverter Fed Open-End Motor for Electrical Vehicle Applications. IEEE Trans. Power Electron. 2016, 31, 2980–2990. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Control Strategy | Control Principle | Control Type | Flux Observer | Outer Loop | Inner Loop | Additional Control | |||
|---|---|---|---|---|---|---|---|---|---|
| Motor | RB | Motor | RB | Motor | RB | Motor and RB | |||
| DTC | Direct flux and Torque control [23] MTPA [24] | Voltage | Torque [23,24] | Angular Frequency Control | Using stator voltage and current [23,24] | Speed [23,24] | Angular frequency | ΔT, Δψs [23,24] ΔT, Δψs and ɷs based switching configuration selection | Sensorless estimation of ψs, Te, and ɷs using vs. and is |
| DFOC | MTPA [22] Decoupled control of rotor flux and torque with torque ripple reduction [25,26] | Voltage | Torque | DC bus Voltage regulation | Using stator voltage and current [25,26] | Speed [22] Rotor flux and torque control using SMC [25] and PI [26] | Voltage | Stator current and its reference current | Torque ripple reduction |
| IFOC | Speed and slip control [20] Torque and magnetic flux tracking [17] Speed and torque control [27] | Voltage | Torque [17,20,27] | DC bus Voltage regulation [17,27] | Flux estimation using sliding mode observer Rotor flux estimation using super twisting observer [17] and speed [20] | Speed [17,20] | SC Voltage [17] DC bus Voltage regulation | Stator current and its reference current [20] | FTC [20] |
| MPC | Field Weakening control [19] MPDTC [28] | Voltage | Speed [19,28] | DC bus Voltage regulation | Using stator voltage and current | Speed [19,28] | DC bus Voltage regulation | Stator current and its reference current [19] | Field weakening control |
| Control Strategy | Control Principle | Control Type | Flux Observer | Outer Loop | Inner Loop | Additional Control | |||
|---|---|---|---|---|---|---|---|---|---|
| Motor | RB | Motor | RB | Motor | RB | Motor & RB | |||
| DTC | Asymmetric torque ripple regulation [37] Model predictive speed control [44] Torque control [45] | voltage | Torque control [37] Speed Control [44] | voltage | Using Stator voltage and stator current [37] stator current and voltage vector [44] stator current [45] | Speed [44,45] | voltage | Electromagnetic torque and its reference torque for hysteresis controller [37] Look up the table for voltage vector selection [45] | Sensorless control |
| DFOC | MTPA [34] Speed regulation [35] Anti-Lock Braking Control [36] | Voltage [35] PID controller [36] | Speed control [34] Torque [35,36] | Voltage | Stator current and voltage | Speed Voltage [35] Torque [36] | Voltage | Current | Current regulation Speed Control with Slip Regulation |
| IFOC | MTPA [40] speed adaptive Controller [38] speed and predictive current controller [46] | MRPP | Speed [40] Torque control Speed [38] | Regenerate more power with less electrical braking torque [46] | Flux and torque estimation using sliding mode observer | Torque and Speed | Speed, torque and temperature | Current [40] Δiq* and iq* [46] | Current controller |
| MPC | MPDTC [47] Speed control [48] | Voltage | Torque control [47] | Voltage | Flux and torque estimation using prediction model [47] | Speed [47] | voltage | current | Generalized predictive controller |
| Types of Machine | Control Principle | Control |
|---|---|---|
| SRM | Torque control: DTC [49] Speed control: MPC [50] Anti-Slip and Braking Control: DTC [51] Current chopping and direct torque control: DTC [52] Digital PI current regulator: MPC [53] Current regulation and braking torque control: DTC [54] Torque per ampere control: DTC [55] | Torque [49,51,52,55] Speed [50] RBC [54] Current control [53] |
| SyncRM | Field-oriented control: IFOC [56] Flux-weakening control: IFOC [57] Torque per ampere control: DTC [58] Sensorless DTFC-SVM Control: IFOC [59] MTPA: DTC [60] | Speed [58] Torque [56,57] |
| BLDC | Speed control: DTC [61] Braking torque control: DFOC [62,63] Motor rotational speed measurement: IFOC [64] | Speed [61] RBC [62,63,64] |
| DFIG | DTC: Electrical port control [18] | Torque [18] |
| Type of Motor | Power Density (100 KW/m2) | Volume (m3) | Efficiency (%) |
|---|---|---|---|
| IM | 0.26 | 0.8 | 96.37 |
| PMSM | 0.42 | 0.56 | 97.62 |
| SRM | 0.22 | 0.97 | 87 |
| SyncRM | 0.2 | 0.65 | 80 |
| BLDC | 0.30 | 0.70 | 85 |
| Control Strategy | Structure | Strength | Weakness | Application in EV |
|---|---|---|---|---|
| DTC |
|
|
|
|
| IFOC |
|
|
|
|
| DFOC |
|
|
|
|
| MPC |
|
|
|
|
| Energy Storage | Energy Density (Wh/kg) | Power Density (kW/kg) | Reaction Type |
|---|---|---|---|
| Lead–acid battery | 30–50 | 0.18 | Electrochemical |
| Lithium-ion | 110–200 | 0.8–2 | |
| Sodium–Nickel chloride | 95–120 | 0.35–1.1 | |
| Nickel–metal hydride battery | 60–120 | 0.4–1.2 | |
| Lithium–iron Phosphate | 90–160 | 1.3–3.5 | |
| Nickel–cadmium battery | 45–80 | 0.5–0.75 | |
| Nickel zinc | 100 | 0.28 |
| Type of Battery | Advantages | Disadvantages |
|---|---|---|
| Lead–acid [65,66] | High power and efficiency, used for a long time without fundamental problems since no significant constraint was really applied to them. | Battery currents have great amplitude variations |
| Lithium-ion (Li-ion) [67,68] | Ability to accept high power supply, and efficiency, batteries are the most common and commonly recognized power source for mobile applications. | High battery capacity detection error and low life prediction accuracy |
| Sodium–nickel chloride (Na-NiCl2) [69] | High specific energy, consistent performance, the ability to store things for a long time without them degrading, safety, and low environmental impact to materials that are completely recyclable | High operational temperature of the cells. |
| Nickel–metal hydride (Ni-MH) [70] | Excellent life cycle. | Longer charge time than NiCd and produces greater heat while charging. Self-discharge is high. |
| Lithium–iron phosphate (LiFePO4) [71] | Higher than average theory capacity, excellent thermal and chemical stability, inexpensive and simple to produce, and environmentally responsible manufacturing and recycling. | Very low electronic conductivity. |
| Nickel–cadmium (NiCd) [72] | Lighter weight, smaller size, and lower cost energy storage for the series hybrid propulsion system. | Exhibits negative temperature coefficient. More costly than lead–acid batteries. |
| Nickel–zinc (NiZn) [73] | High power energy storage and low cost. | Higher cost than lead acid batteries. |
| Topology | Advantage | Disadvantage |
|---|---|---|
| SC + Battery + Bidirectional DC-DC converter, Battery + SC + Unidirectional or bidirectional DC-DC converter [77] | Improved optimal sizing and sensitivity analysis of HESS. Decreased economic cost. | The battery pack needs to provide extra energy to cover the DC-DC conversion losses. |
| SC + Bidirectional DC-DC Converter + Battery [78] | Minimize battery degradation and financial costs, and reduced battery power fluctuation. | Increased energy capacity loss with increased battery sizing. |
| Battery + SC + DC-DC Converter [79] | Reduced complexity, flexible perception and intelligent rulemaking, improved adaptive energy management techniques, and optimized HESS technology. | Difficult to forecast the performance. |
| Battery + SC + DC-DC converter [80] | More RB energy can be effectively absorbed by the supercapacitor due to its high charge efficiency. | Low system efficiency. |
| Battery + SC + DC-DC Converter [81] | Battery power fluctuation can be minimized, energy loss is low, the SC voltage and its reference value gap are reduced, and effective RBC is achieved. | Low power flow. |
| Battery + SC + Fuel + DC-DC Converter [82] | The Li-ion battery supplies the required power and provides a high level of energy. | ESS weight affects the vehicle’s performance. |
| UC + Battery+ Bidirectional DC-DC converter [83] | Power density and decoupling power of ESS can be improved, and battery lifetime and performance can be improved. | Increased computational time particularly slows down the run-time simulation. |
| Battery + SC + DC-DC converter [84] | Maintain the frequent charging–discharging operations of batteries and allow peak power fulfillment. | A fixed gear ratio might decrease the speed of the motor. |
| Passive Energy Storage | Semi-Active Energy Storage | Fully-Active Energy Storage |
|---|---|---|
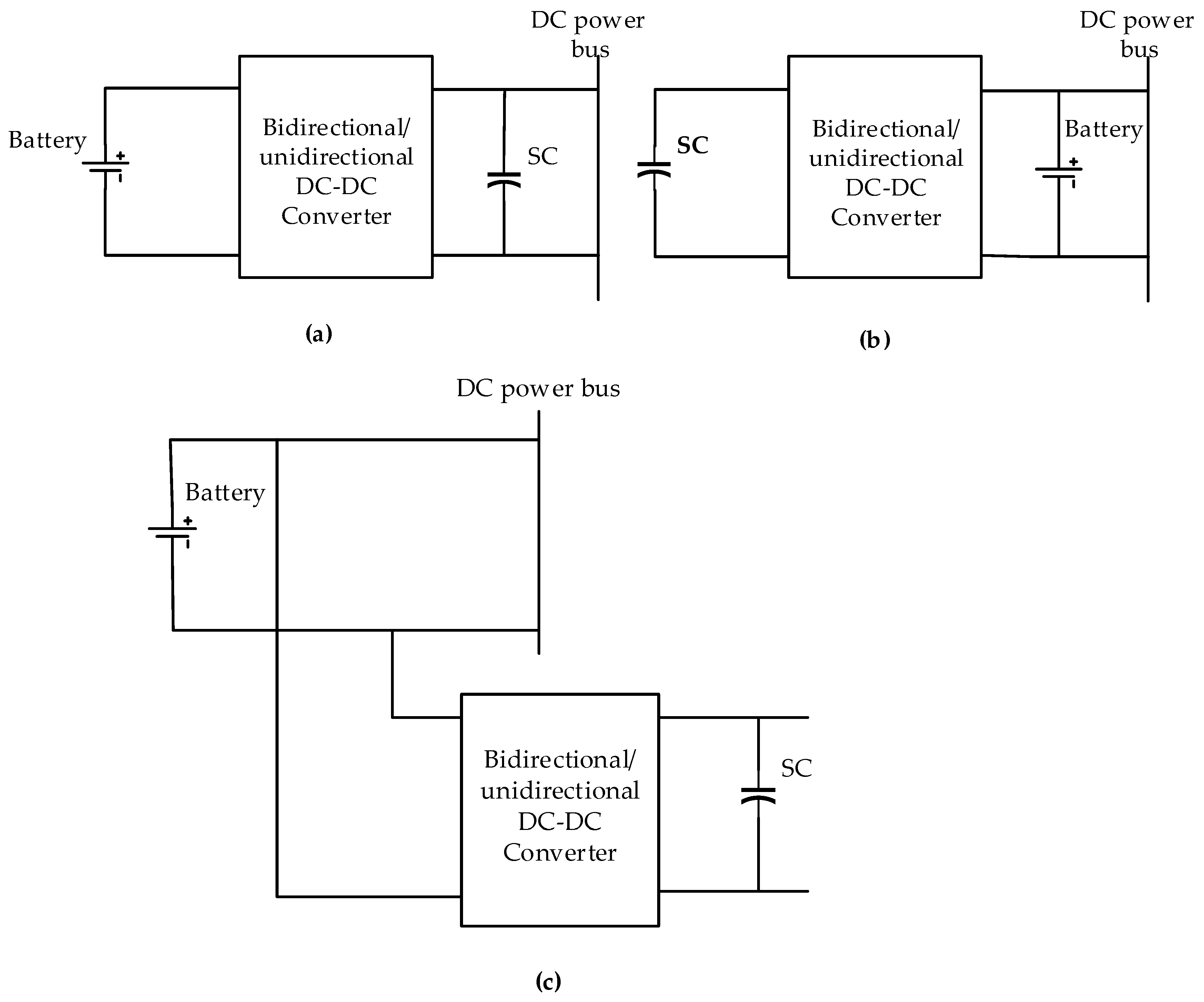
| The passive HESS couples directly to the load without using any electronic converters, connecting the battery and UC banks in parallel. The battery voltage, which often experiences slight fluctuations during operation, is what determines the voltage of the ultra-capacitor bank. As a result of the inherent connection between voltage and energy provided, the power potential of ultra-capacitors may not be fully used. | Only one DC-DC converter is used by the semi-active HESS to provide a simple circuit with good performance. | Two DC-DC converters are used by the fully-active HESS to provide the best performance. |
| Ypes of Converter | Advantages | Disadvantages | Control |
|---|---|---|---|
| Boost converter MIMO DC-DC [85]. Stackable switched converter [86]. Boost converter [87,88]. Isolated DC-DC converter [89]. |
| ||
| Buck converter Integrated multiple output synchronous converters [90]. Single input multiple outputs [91]. | |||
| Buck-Boost converter Boost and buck mode [92]. VI-based converter (boost motoring buck RB) [93]. Half bridge non-isolated converters (boost motoring, buck RB) [94]. |
| Types of Inverter | Advantages | Disadvantage | Types of Control | Types of Motor |
|---|---|---|---|---|
| Three-phase propulsion inverter [100] Quasi Z-source inverter [101] Distributed inverter [102] SiC inverter [103] Three-level EV traction inverter [104] |
|
|
|
|
| H-bridge multilevel boost inverter [105] Cascaded MLI [106] 23-level inverter [107] Symmetrical and asymmetrical MLI [108] Dual inverter [109] |
| Type | EV Model | Manufacturing Year | Power Rating (kW) | Max. Torque (Nm) | Max. Speed (km/h) | Type of Motor | Battery Type with Capacity (kWh) |
|---|---|---|---|---|---|---|---|
| 4 Wheeler | Chevrolet Bolt | 2022 | 65 | 360 | 145 | PMSM | Li-ion (66) |
| Tesla Model Y | 2021 | 179 | 660 | 222 | PMSyncRMM | Li-ion (75) | |
| Nio Ec6 | 2020 | 320 | 725 | 100 | PMSM | Li-ion (100) | |
| Mercedes-Benz Eqc | 2019 | 80 | 230 | 130 | PMSM | Li-ion (80) | |
| Volkswagen E-Up | 2019 | 60 | 212 | 100 | PMSM | Li-ion (32.3) | |
| Xpeng G3 | 2018 | 139 | 300 | 170 | PMSM | Li-ion (59.5) | |
| Bjev Eu5 | 2018 | 160 | 300 | 160 | PMSM | Li-ion (53.6) | |
| Hyundai Kona | 2018 | 88–150 | 395 | 167 | PMSM | Li-ion polymer (39.2) | |
| Prius | 2017 | 53 | 163 | 180 | PMSM | Li-ion (4.4) | |
| Bolt | 2017 | 150 | 360 | 145 | PMSM | Li-ion (66) | |
| Mahindra E2o Plus | 2016 | 19–30 | 70 | 90 | IM | Li-ion (30) | |
| Hyundai Ioniq Electric | 2016 | 88 | 169 | 165 | PMSM | Li-ion polymer (8.9) | |
| Tesla Model X | 2015 | 193–375 | 660 | 250 | IM | Li-ion (100) | |
| BMW I3 | 2013 | 125 | 250 | 150 | PMSM | Li-ion (42.2) | |
| Renault Zoe | 2012 | 65 | 245 | 135 | PMSM | Li-ion (52) | |
| Renault Fluence Z.E | 2012 | 70 | 226 | 135 | PMSM | Li-ion (22) | |
| Tesla Model S | 2012 | 235–568 | 660 | 276.5 | IM | Li-ion (22) | |
| 3 Wheeler | Kinetic Safer Jumbo | 2020 | 8.1 | 45 | 55 | BLDC | Li-ion (8.2) |
| Lohia Narain Cargo | 2018 | 1950 | - | 25 | BLDC | Li-ion (105 Ah) | |
| Mahindra Tero Zor | 2016 | 8 | 42 | 125 | - | Li-ion (7.37) | |
| Piaggio Ape E xtra | 2013 | 9.55 | 45 | 45 | - | Li-ion (8) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sangeetha, E.; Ramachandran, V. Different Topologies of Electrical Machines, Storage Systems, and Power Electronic Converters and Their Control for Battery Electric Vehicles—A Technical Review. Energies 2022, 15, 8959. https://doi.org/10.3390/en15238959
Sangeetha E, Ramachandran V. Different Topologies of Electrical Machines, Storage Systems, and Power Electronic Converters and Their Control for Battery Electric Vehicles—A Technical Review. Energies. 2022; 15(23):8959. https://doi.org/10.3390/en15238959
Chicago/Turabian StyleSangeetha, Elango, and Vijayapriya Ramachandran. 2022. "Different Topologies of Electrical Machines, Storage Systems, and Power Electronic Converters and Their Control for Battery Electric Vehicles—A Technical Review" Energies 15, no. 23: 8959. https://doi.org/10.3390/en15238959