
Position Estimation of Multiple Receiving Coils and Power Transmission Control for WPT without Feedback


Abstract
:1. Introduction
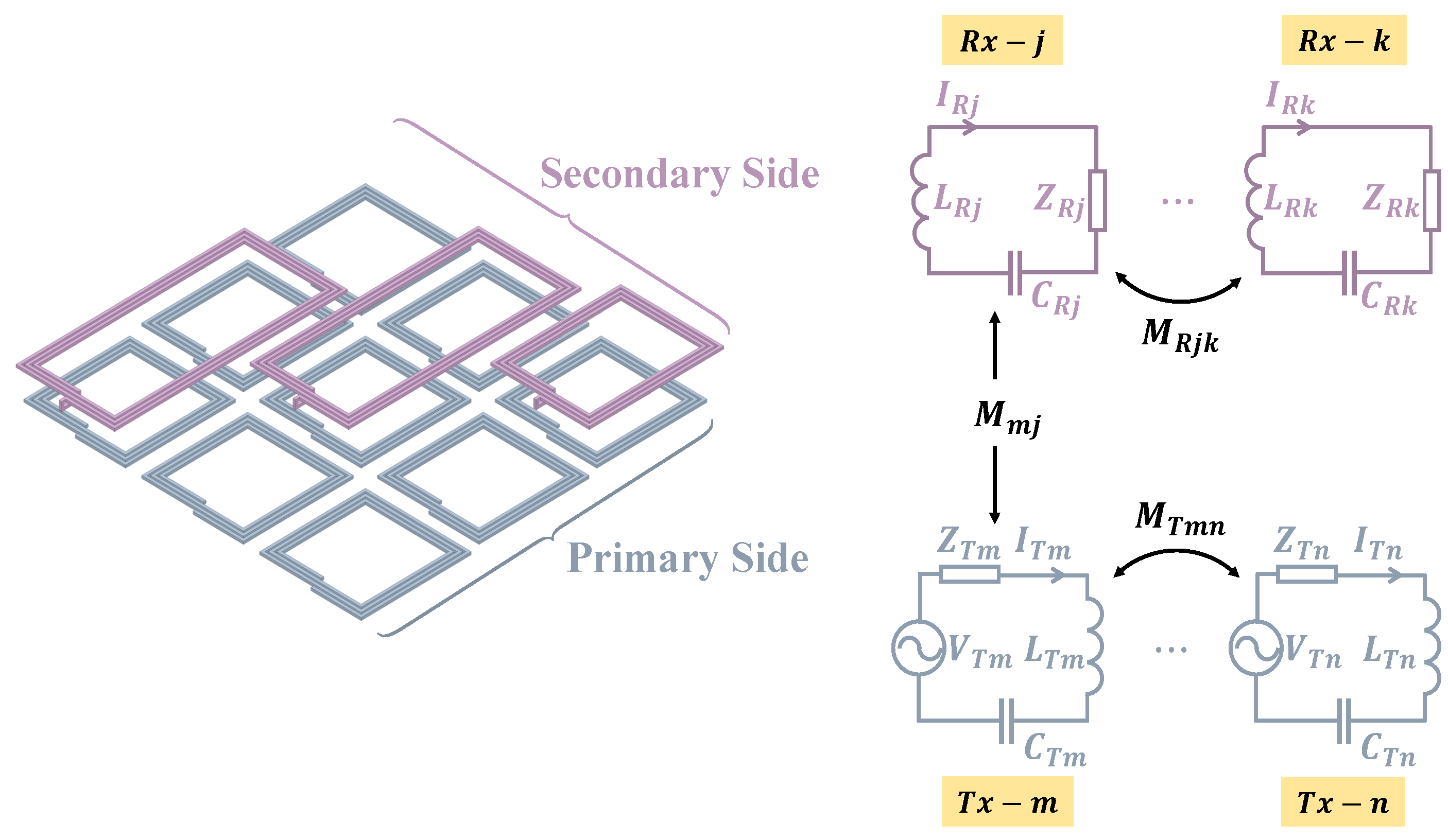
2. WPT Equivalent Circuit Equation
3. Principles of the Proposed Method
3.1. Theoretical Analysis of the Proposed Method
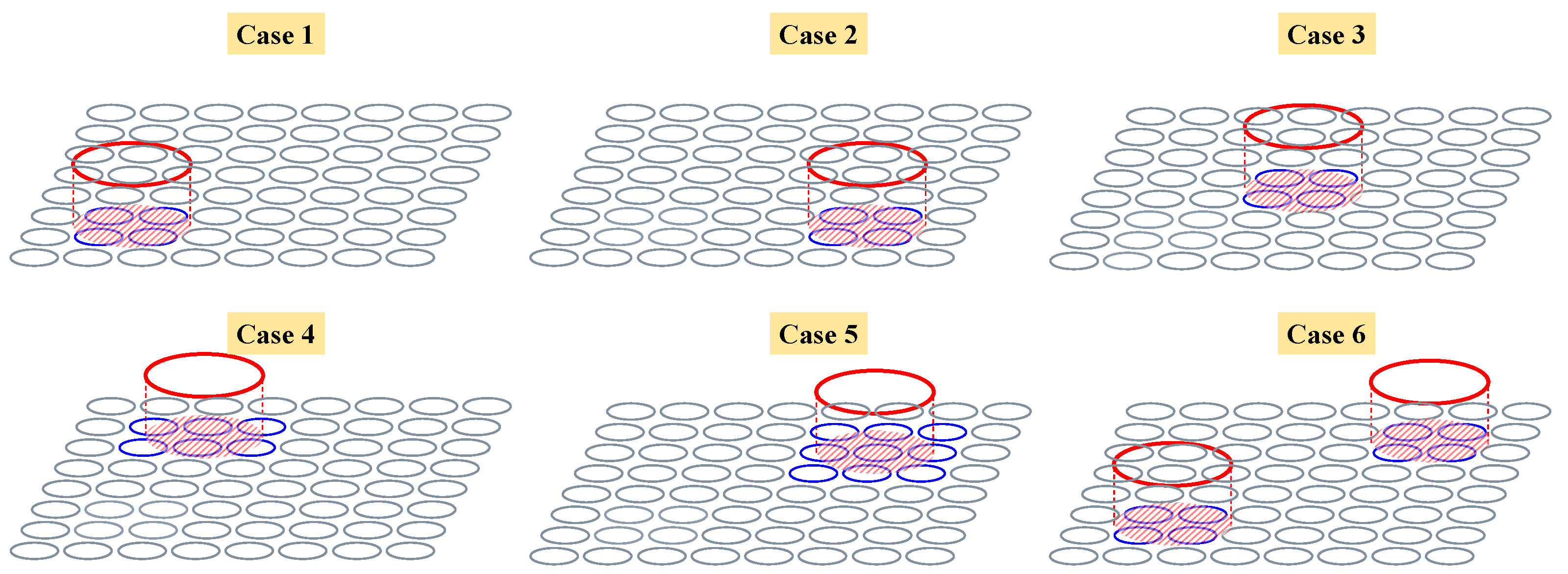
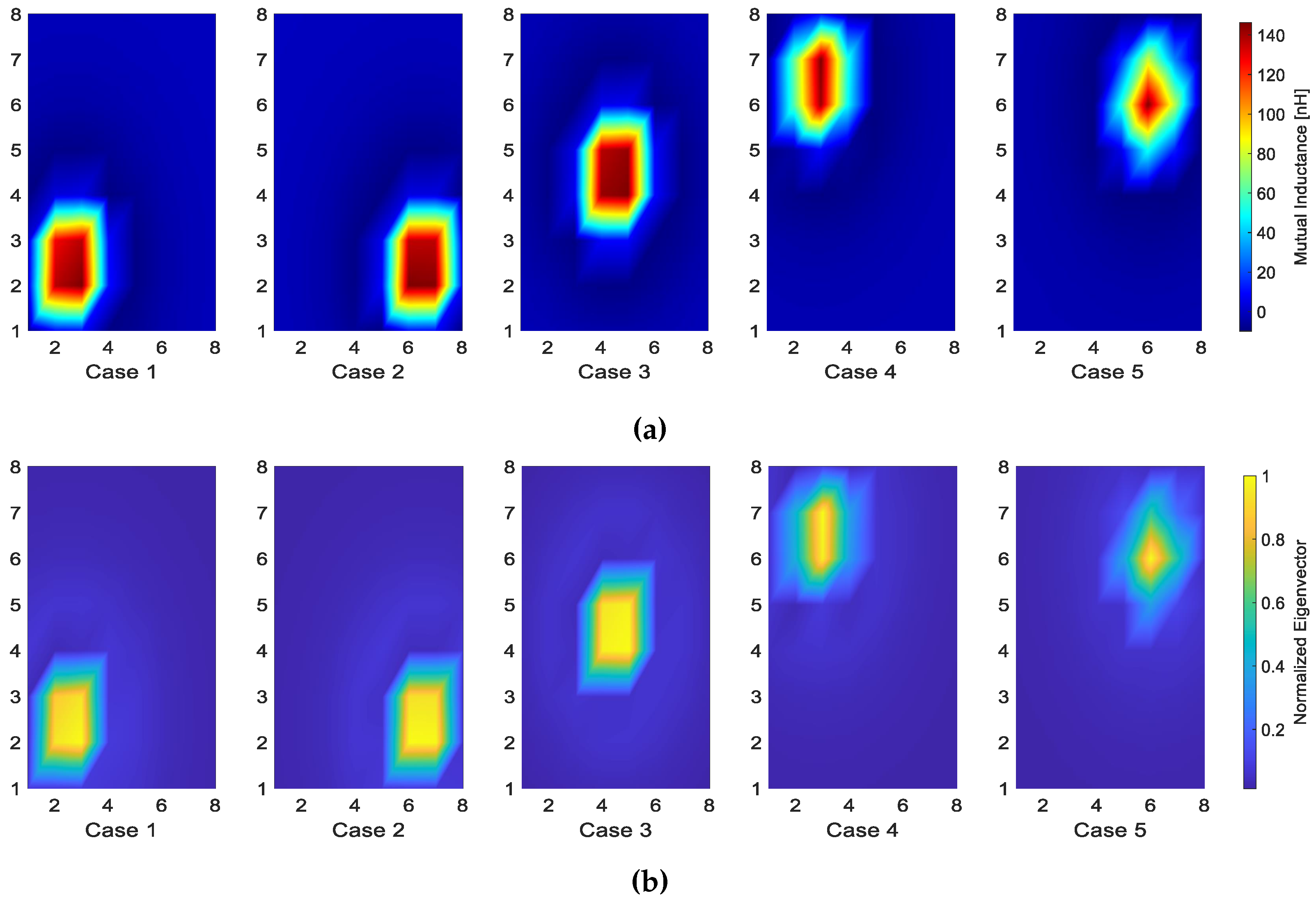
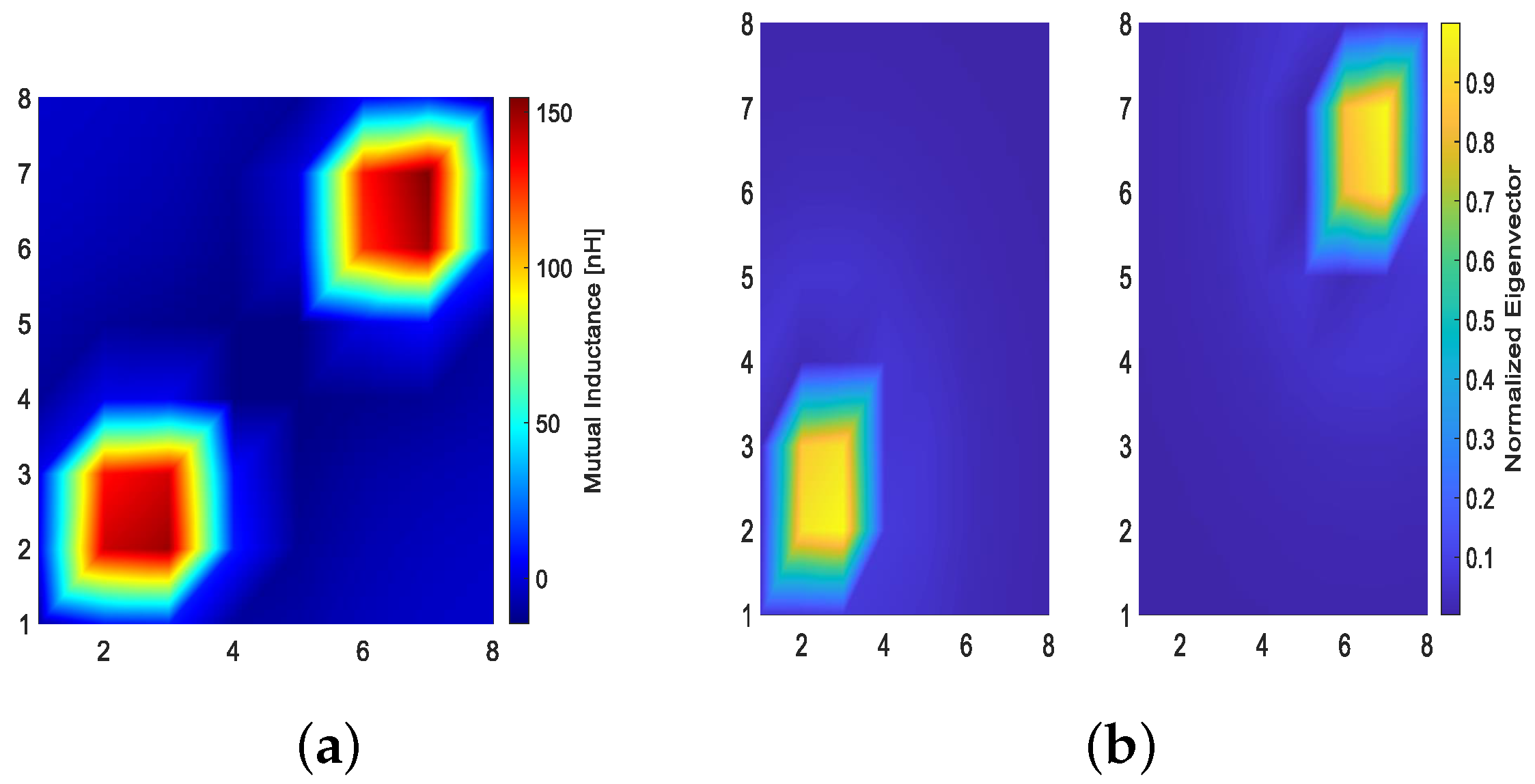
3.2. Simulation and Results
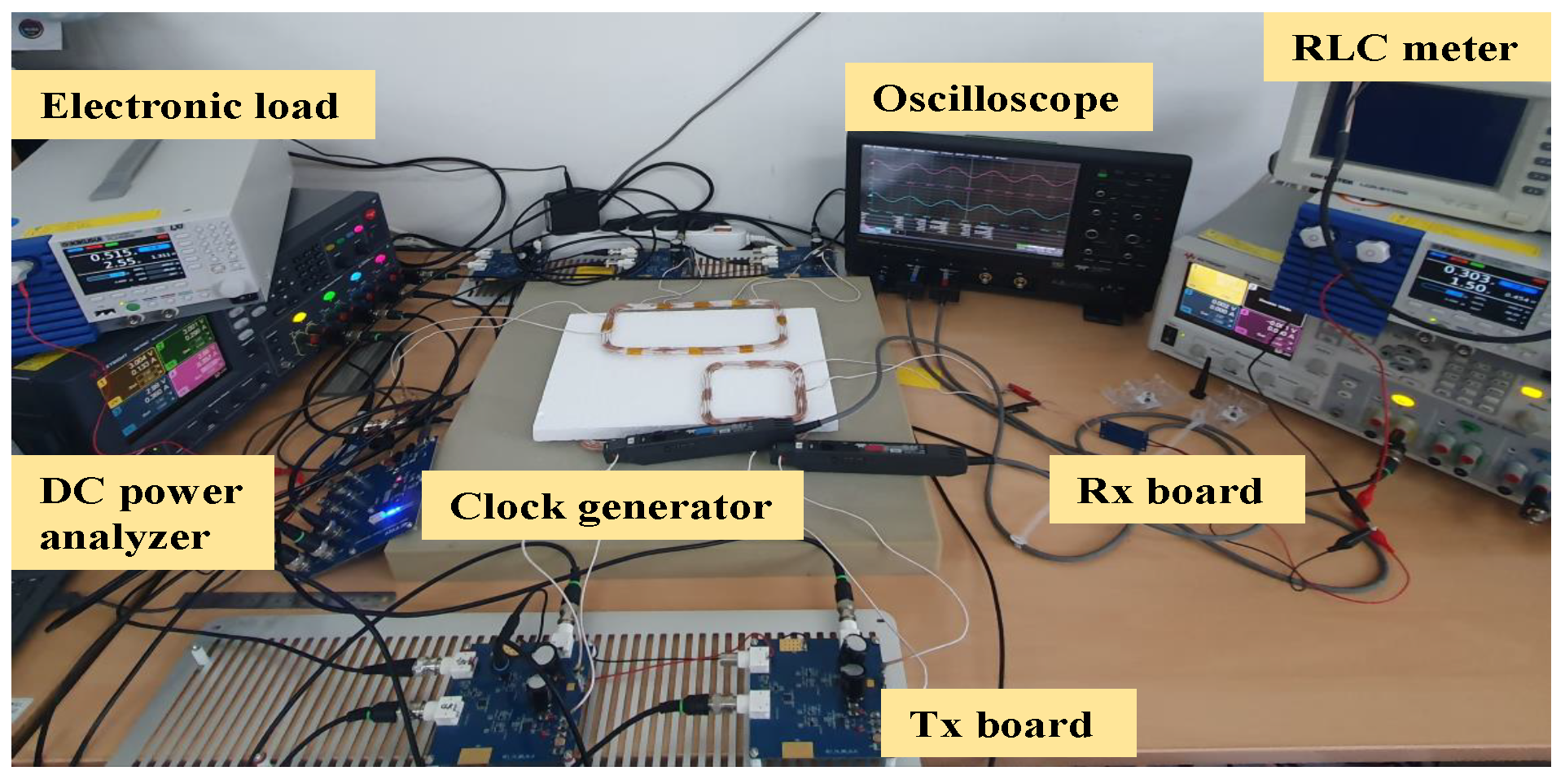
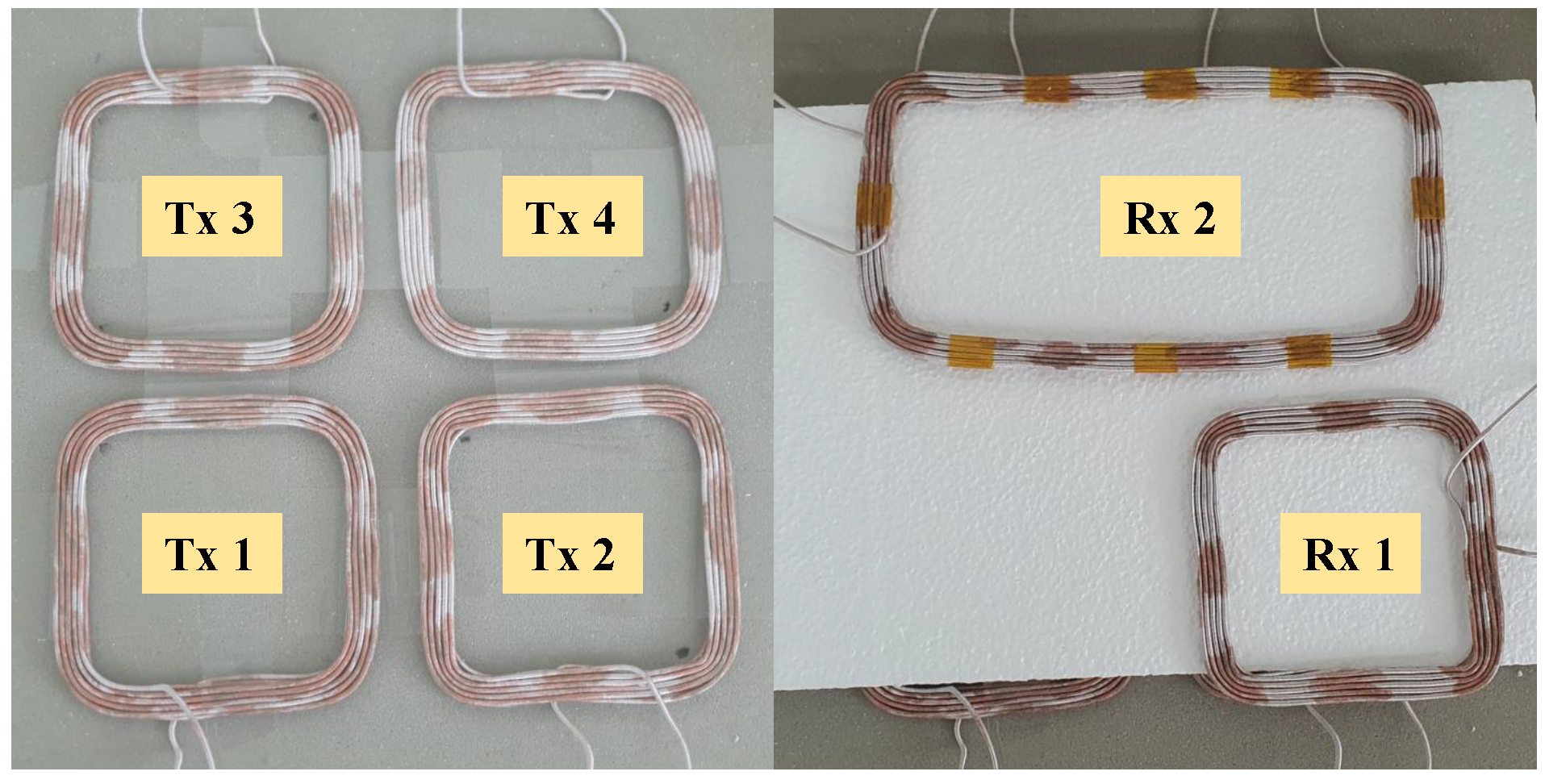
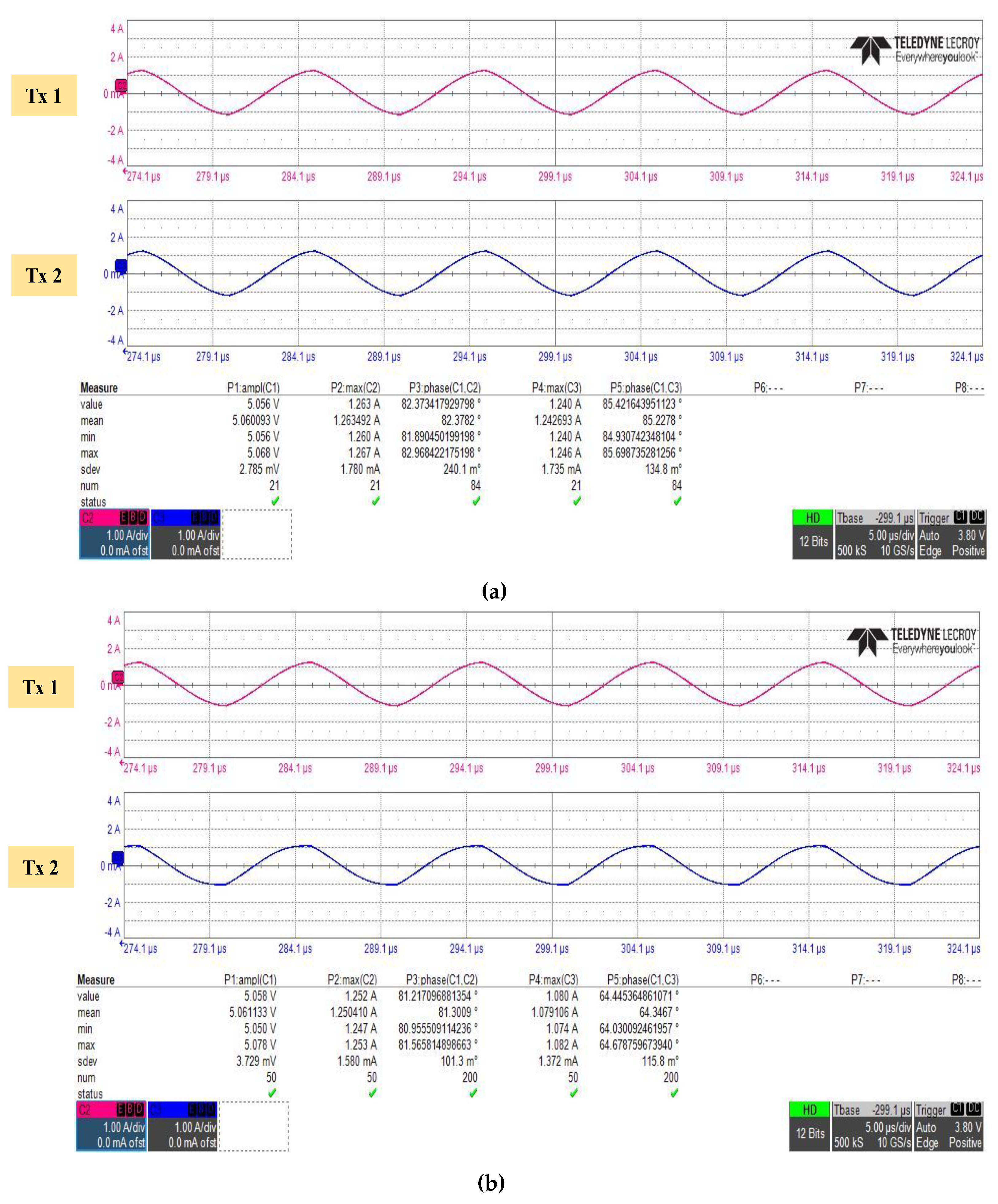
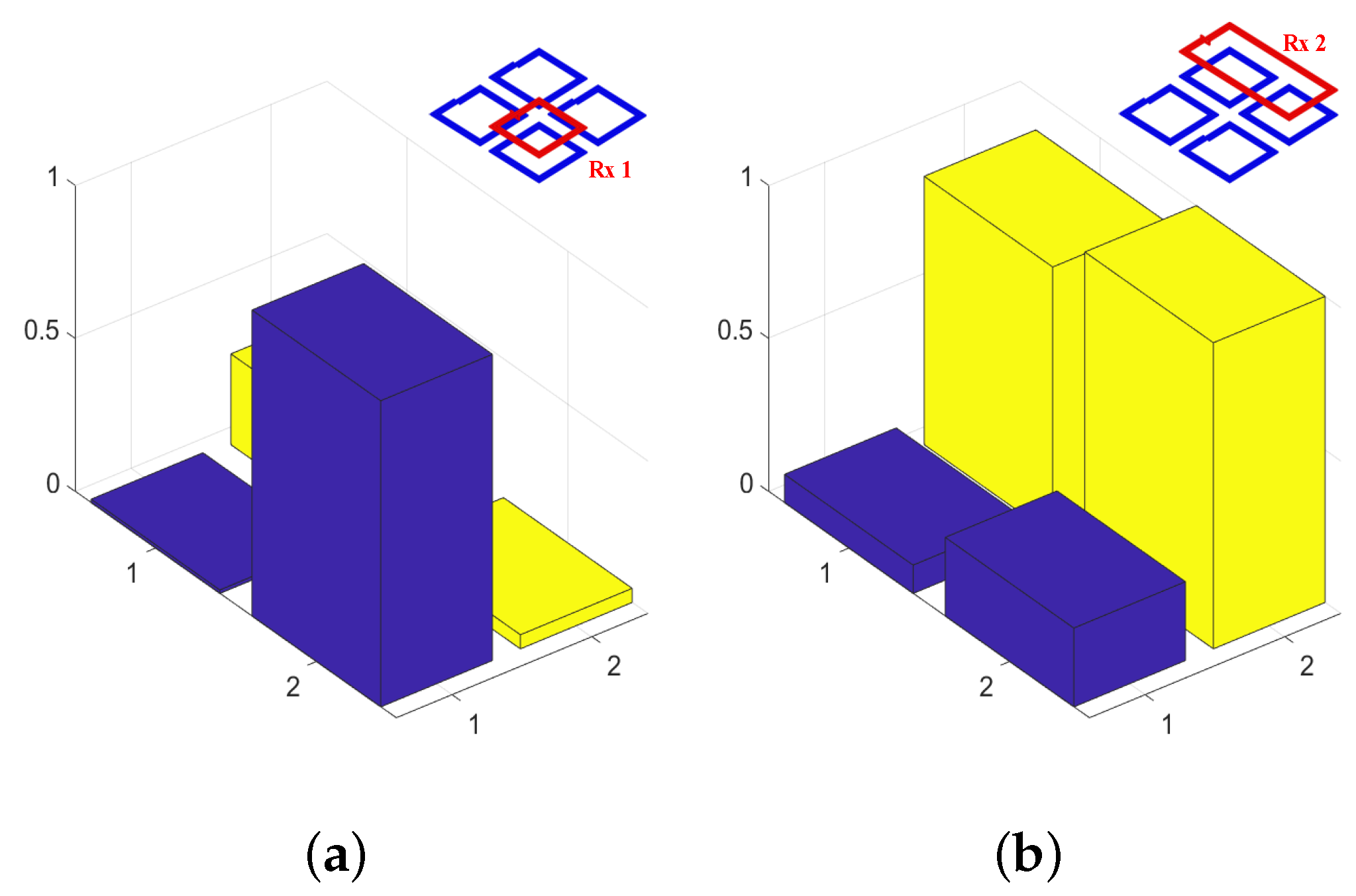
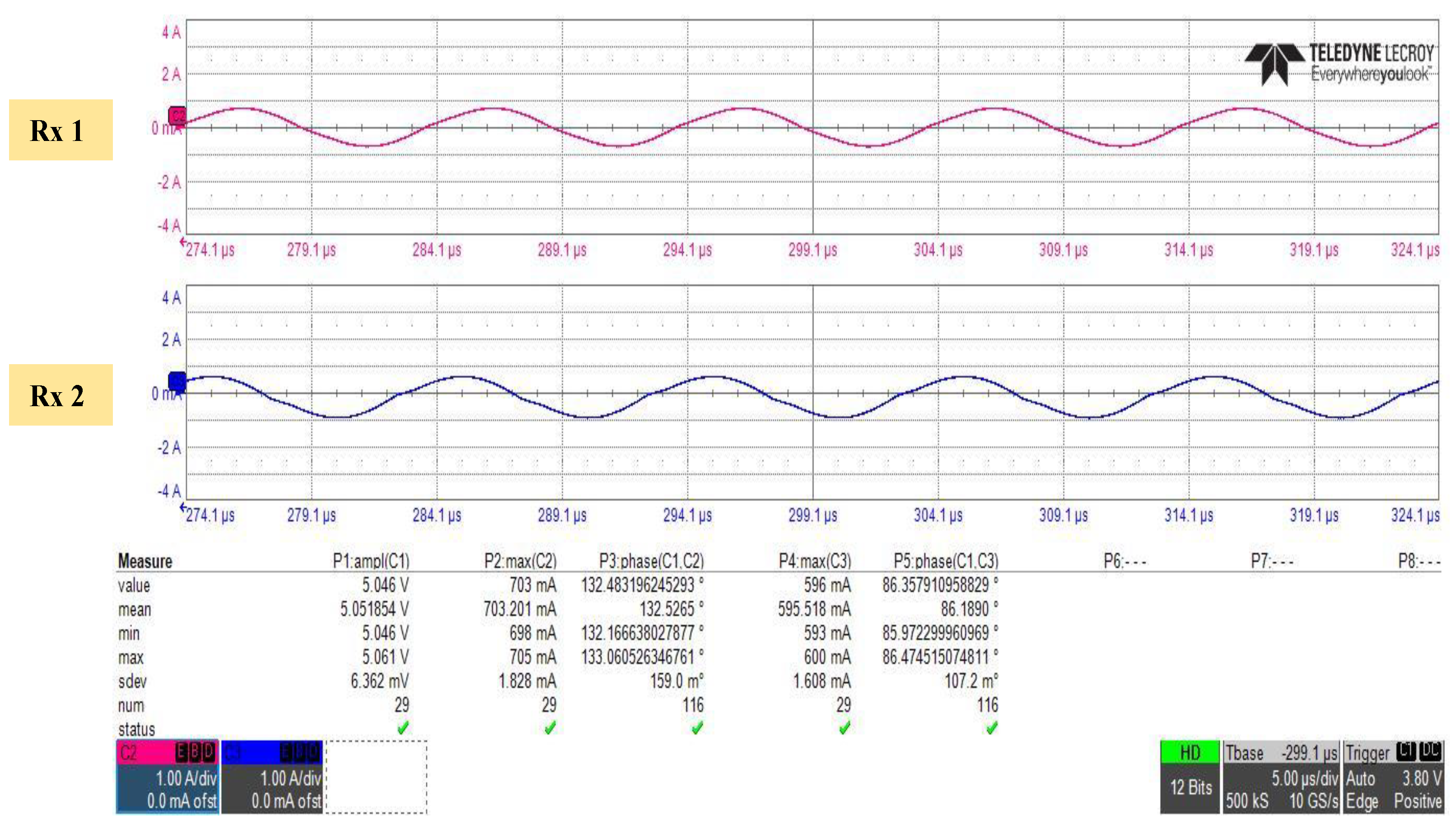
4. Experimental Verifications
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Xie, L.; Cao, X.; Xu, J.; Zhang, R. UAV-Enabled Wireless Power Transfer: A Tutorial Overview. IEEE Trans. Green Commun. Netw. 2021, 5, 2042–2064. [Google Scholar] [CrossRef]
- Mahesh, A.; Chokkalingam, B.; Mihet-Popa, L. Inductive Wireless Power Transfer Charging for Electric Vehicles–A Review. IEEE Access 2021, 9, 137667–137713. [Google Scholar] [CrossRef]
- Campi, T.; Cruciani, S.; Maradei, F.; Feliziani, M. Efficient Wireless Drone Charging Pad for Any Landing Position and Orientation. Energies 2021, 14, 8188. [Google Scholar] [CrossRef]
- Kim, J.; Marin, G.; Seo, J.M.; Neviani, A. A 13.56 MHz reconfigurable step-up switched capacitor converter for wireless power transfer system in implantable medical devices. Analog. Integr. Circuits Signal Process. 2022, 110, 517–525. [Google Scholar] [CrossRef]
- Tung, L.V.; Seo, C. A Miniaturized Implantable Antenna for Wireless Power Transfer and Communication in Biomedical Applications. J. Electromagn. Eng. Sci. 2022, 22, 440–446. [Google Scholar] [CrossRef]
- Park, Y.J. Next-Generation Wireless Charging Systems for Mobile Devices. Energies 2022, 15, 3119. [Google Scholar] [CrossRef]
- Linlin, T.; Xueliang, H.; Hui, L.; Hui, H. Study of Wireless Power Transfer System Through Strongly Coupled Resonances. In Proceedings of the 2010 International Conference on Electrical and Control Engineering, Wuhan, China, 25–27 June 2010; pp. 4275–4278. [Google Scholar] [CrossRef]
- Yan, Z.; Yang, B.; Liu, H.; Chen, C.; Waqas, M.; Mai, R.; He, Z. Efficiency Improvement of Wireless Power Transfer Based on Multitransmitter System. IEEE Trans. Power Electron. 2020, 35, 9011–9023. [Google Scholar] [CrossRef]
- Mou, X.; Groling, O.; Sun, H. Energy-Efficient and Adaptive Design for Wireless Power Transfer in Electric Vehicles. IEEE Trans. Ind. Electron. 2017, 64, 7250–7260. [Google Scholar] [CrossRef] [Green Version]
- Oh, H.; Oh, S.; Koo, H.; Choi, W.; Shin, J.; Hwang, K.C.; Lee, K.Y.; Yang, Y. Mid-Range Wireless Power Transfer System for Various Types of Multiple Receivers Using Power Customized Resonator. IEEE Access 2021, 9, 45230–45241. [Google Scholar] [CrossRef]
- Rong, C.; He, X.; Liu, M.; Wang, Y.; Liu, X.; Lu, C.; Zeng, Y.; Liu, R. Omnidirectional Free-Degree Wireless Power Transfer System Based on Magnetic Dipole Coils for Multiple Receivers. IEEE Access 2021, 9, 81588–81600. [Google Scholar] [CrossRef]
- Huang, Y.; Liu, C.; Xiao, Y.; Liu, S. Separate Power Allocation and Control Method Based on Multiple Power Channels for Wireless Power Transfer. IEEE Trans. Power Electron. 2020, 35, 9046–9056. [Google Scholar] [CrossRef]
- Jeong, S.Y.; Kwak, H.G.; Jang, G.C.; Choi, S.Y.; Rim, C.T. Dual-Purpose Nonoverlapping Coil Sets as Metal Object and Vehicle Position Detections for Wireless Stationary EV Chargers. IEEE Trans. Power Electron. 2018, 33, 7387–7397. [Google Scholar] [CrossRef]
- Hwang, K.; Cho, J.; Park, J.; Har, D.; Ahn, S. Ferrite Position Identification System Operating With Wireless Power Transfer for Intelligent Train Position Detection. IEEE Trans. Intell. Transp. Syst. 2019, 20, 374–382. [Google Scholar] [CrossRef]
- Lee, W.S.; Park, S.; Lee, J.H.; Tentzeris, M.M. Longitudinally Misalignment-Insensitive Dual-Band Wireless Power and Data Transfer Systems for a Position Detection of Fast-Moving Vehicles. IEEE Trans. Antennas Propag. 2019, 67, 5614–5622. [Google Scholar] [CrossRef]
- Han, W.; Chau, K.T.; Jiang, C.; Liu, W. Accurate Position Detection in Wireless Power Transfer Using Magnetoresistive Sensors for Implant Applications. IEEE Trans. Magn. 2018, 54, 1–5. [Google Scholar] [CrossRef]
- Son, S.; Shin, Y.; Woo, S.; Ahn, S. Sensor Coil System for Misalignment Detection and Information Transfer in Dynamic Wireless Power Transfer of Electric Vehicle. J. Electromagn. Eng. Sci. 2022, 22, 309–318. [Google Scholar] [CrossRef]
- Liang, C.; Zhang, Y.; Li, Z.; Yuan, F.; Yang, G.; Song, K. Coil Positioning for Wireless Power Transfer System of Automatic Guided Vehicle Based on Magnetic Sensing. Sensors 2020, 20, 5304. [Google Scholar] [CrossRef]
- Hwang, K.; Cho, J.; Kim, D.; Park, J.; Kwon, J.H.; Kwak, S.I.; Park, H.H.; Ahn, S. An Autonomous Coil Alignment System for the Dynamic Wireless Charging of Electric Vehicles to Minimize Lateral Misalignment. Energies 2017, 10, 315. [Google Scholar] [CrossRef]
- Al Sinayyid, J.; Takhedmit, H.; Poulichet, P.; Grzeskowiak, M.; Diet, A.; Lissorgues, G. A Reconfigurable Coil Grid for Receiver Localization in Wireless Power Transfer and Magnetic Field Steering. IEEE J. Radio Freq. Identif. 2021, 5, 128–138. [Google Scholar] [CrossRef]
- Hou, X.; Kang, L.; Hu, S.; Yang, H. Mutual Inductance Estimation of Multiple Input Wireless Power Transfer for Charging Electronic Equipment. J. Phys. Conf. Ser. 2020, 1617, 012027. [Google Scholar] [CrossRef]
- Simonazzi, M.; Sandrolini, L.; Mariscotti, A. Receiver Coil Location Detection in a Dynamic Wireless Power Transfer System for Electric Vehicle Charging. Sensors 2022, 22, 2317. [Google Scholar] [CrossRef] [PubMed]
- Cao, G.; Zhou, H.; Zhang, H.; Xu, J.; Yang, P.; Li, X.Y. Requirement-Driven Magnetic Beamforming for MIMO Wireless Power Transfer Optimization. In Proceedings of the 2018 15th Annual IEEE International Conference on Sensing, Communication, and Networking (SECON), Hong Kong, China, 11–13 June 2018; pp. 1–9. [Google Scholar] [CrossRef]
- Shi, L.; Kabelac, Z.; Katabi, D.; Perreault, D. Wireless Power Hotspot That Charges All of Your Devices. In Proceedings of the 21st Annual International Conference on Mobile Computing and Networking. Association for Computing Machinery, Paris, France, 7–11 September 2015; MobiCom ’15. pp. 2–13. [Google Scholar] [CrossRef] [Green Version]
- Kurs, A.; Karalis, A.; Moffatt, R.; Joannopoulos, J.D.; Fisher, P.; Soljačić, M. Wireless Power Transfer via Strongly Coupled Magnetic Resonances. Science 2007, 317, 83–86. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Huh, S.; Ahn, D. Two-Transmitter Wireless Power Transfer with Optimal Activation and Current Selection of Transmitters. IEEE Trans. Power Electron. 2018, 33, 4957–4967. [Google Scholar] [CrossRef]
- Jadidian, J.; Katabi, D. Magnetic MIMO: How to charge your phone in your pocket. In Proceedings of the Annual International Conference on Mobile Computing and Networking, MOBICOM, Maui, HI, USA, 7–11 September 2014. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Tx 1 | Tx 2 | Tx 3 | Tx 4 | Rx 1 | Rx 2 | |
|---|---|---|---|---|---|---|
| R (m) | 339.68 | 97.39 | 62.8 | 65.18 | 168.07 | 140.8 |
| L (H) | 19.66 | 20.06 | 19.6 | 20.64 | 19.75 | 34.81 |
| C (nF) | 201.36 | 197.17 | 201.9 | 191.7 | 200.35 | 72.77 |
| Tx 1 | Tx 2 | Tx 3 | Tx 4 | Rx 1 | Rx 2 | |
|---|---|---|---|---|---|---|
| P (W) | 0 | 1.6056 | 0.8820 | 1.1563 | 1.2 | 0.912 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Heo, J.; Kim, S.-W.; Cho, I.-K.; Park, Y.B. Position Estimation of Multiple Receiving Coils and Power Transmission Control for WPT without Feedback. Energies 2022, 15, 8621. https://doi.org/10.3390/en15228621
Heo J, Kim S-W, Cho I-K, Park YB. Position Estimation of Multiple Receiving Coils and Power Transmission Control for WPT without Feedback. Energies. 2022; 15(22):8621. https://doi.org/10.3390/en15228621
Chicago/Turabian StyleHeo, Jun, Sang-Won Kim, In-Kui Cho, and Yong Bae Park. 2022. "Position Estimation of Multiple Receiving Coils and Power Transmission Control for WPT without Feedback" Energies 15, no. 22: 8621. https://doi.org/10.3390/en15228621