
Principle, Fabrication and Emerging Applications of Nanobottle Motor
Abstract
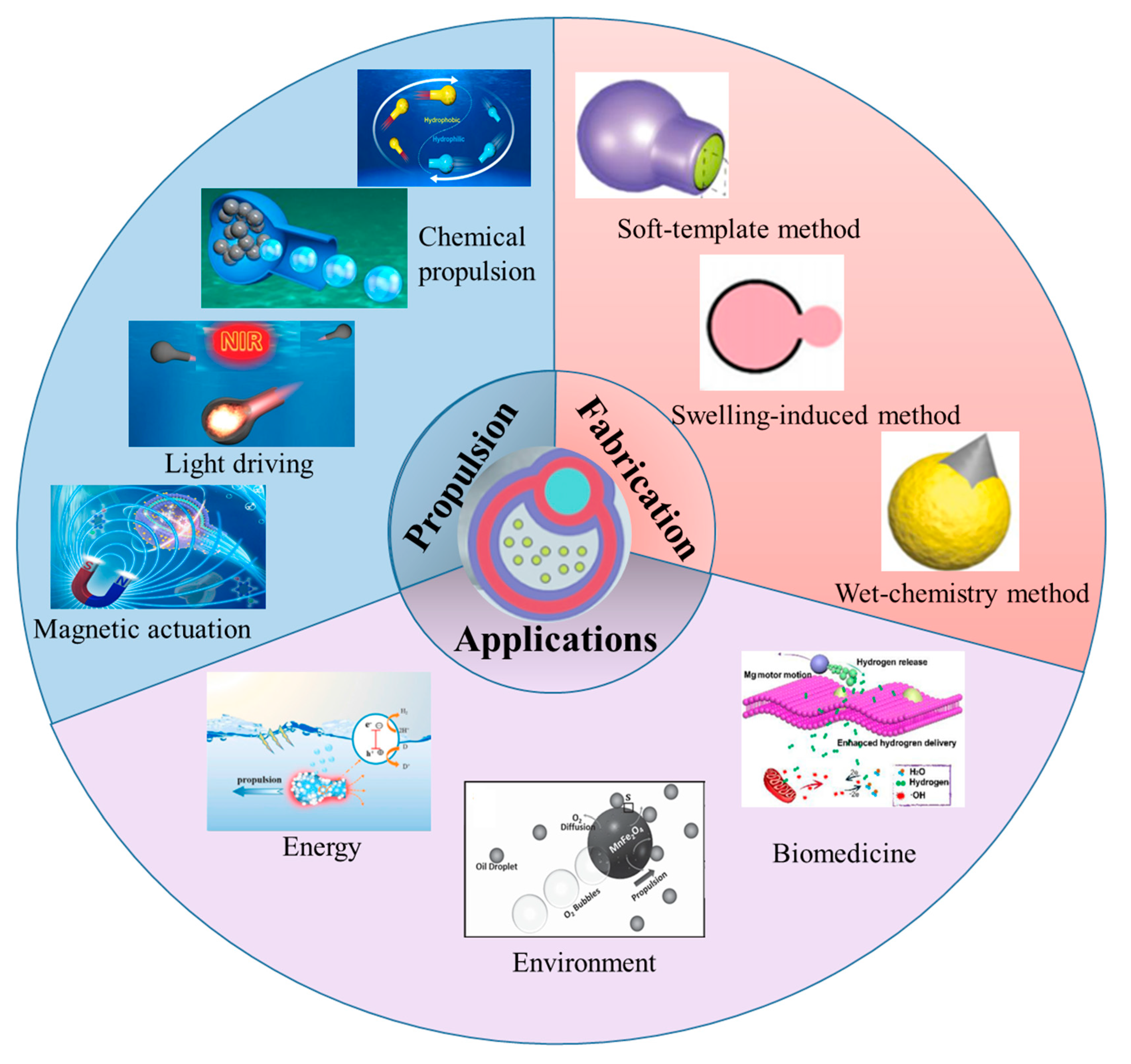
:1. Introduction
2. Propulsion Mechanisms
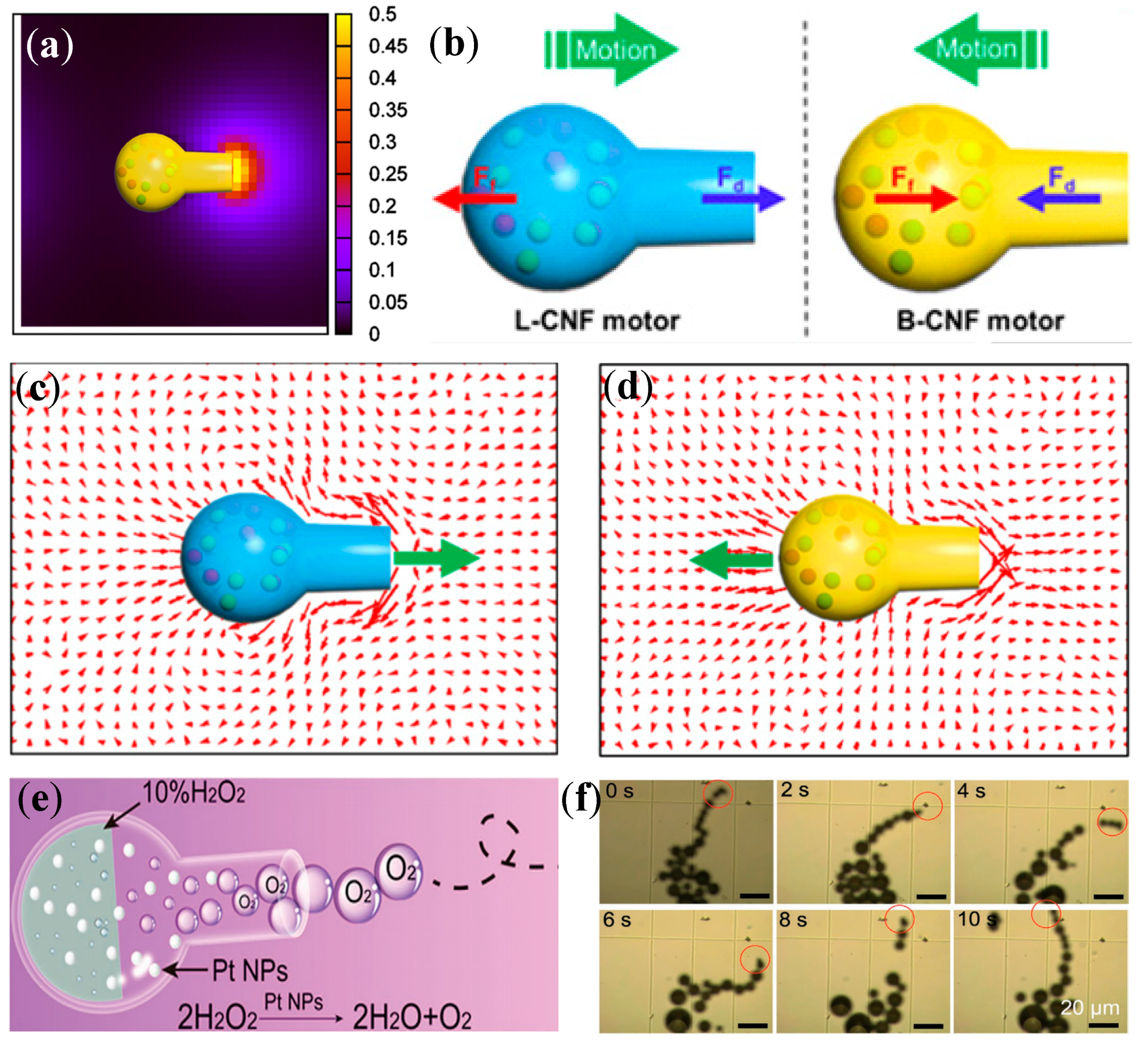
2.1. Chemical Propulsion
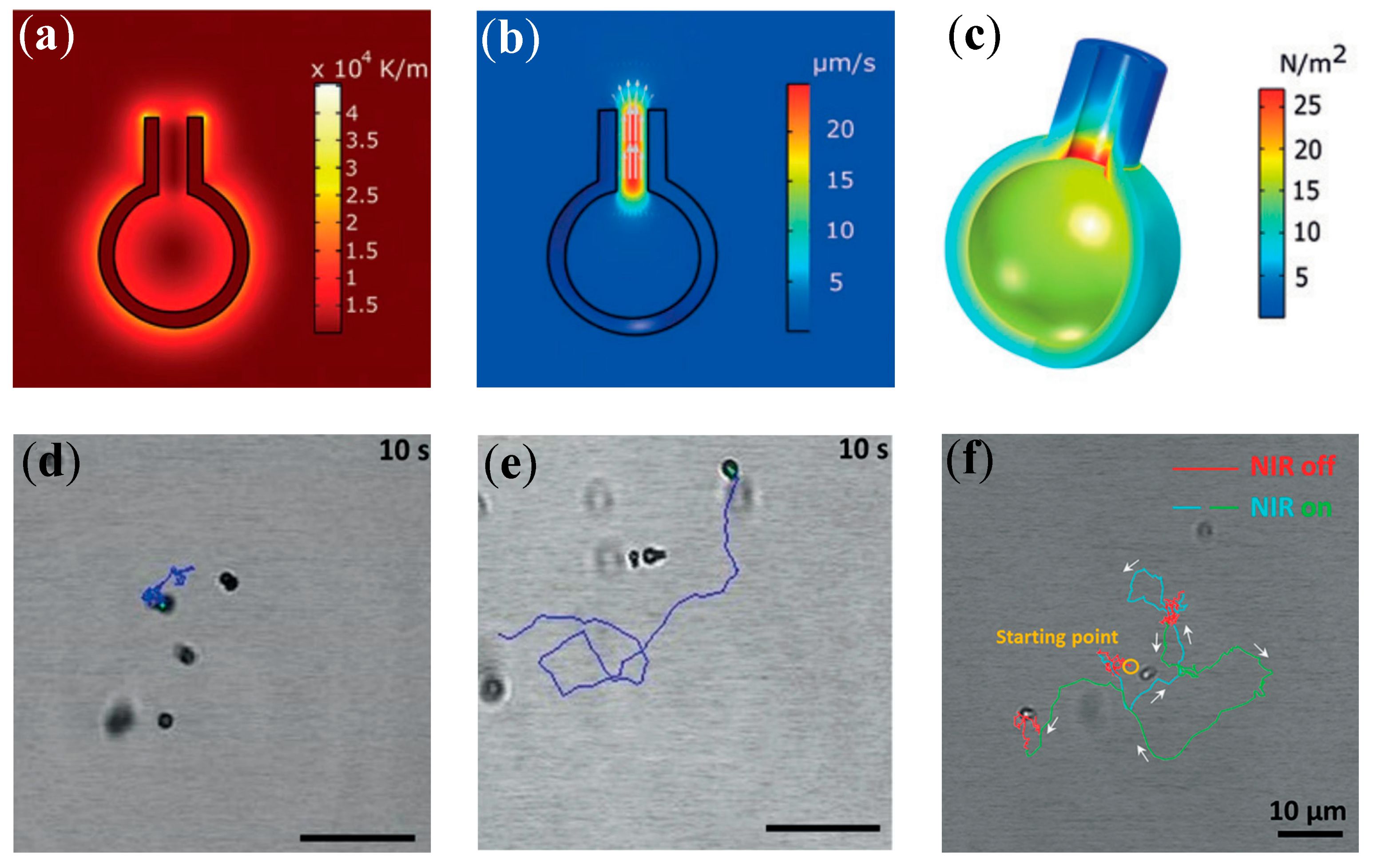
2.2. Light Driving
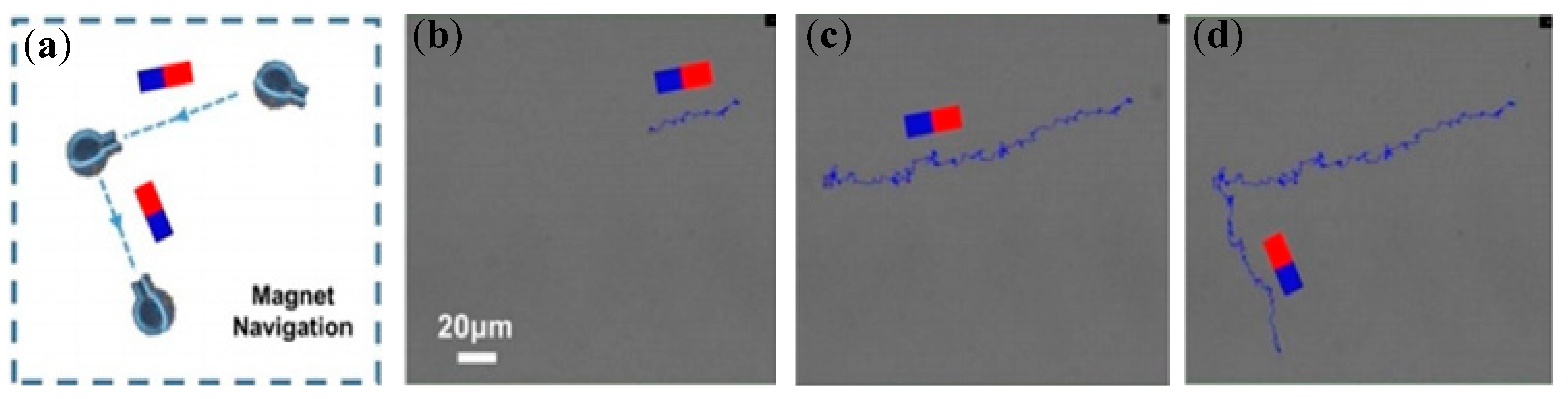
2.3. Magnetic Actuation
3. Fabrication Methods
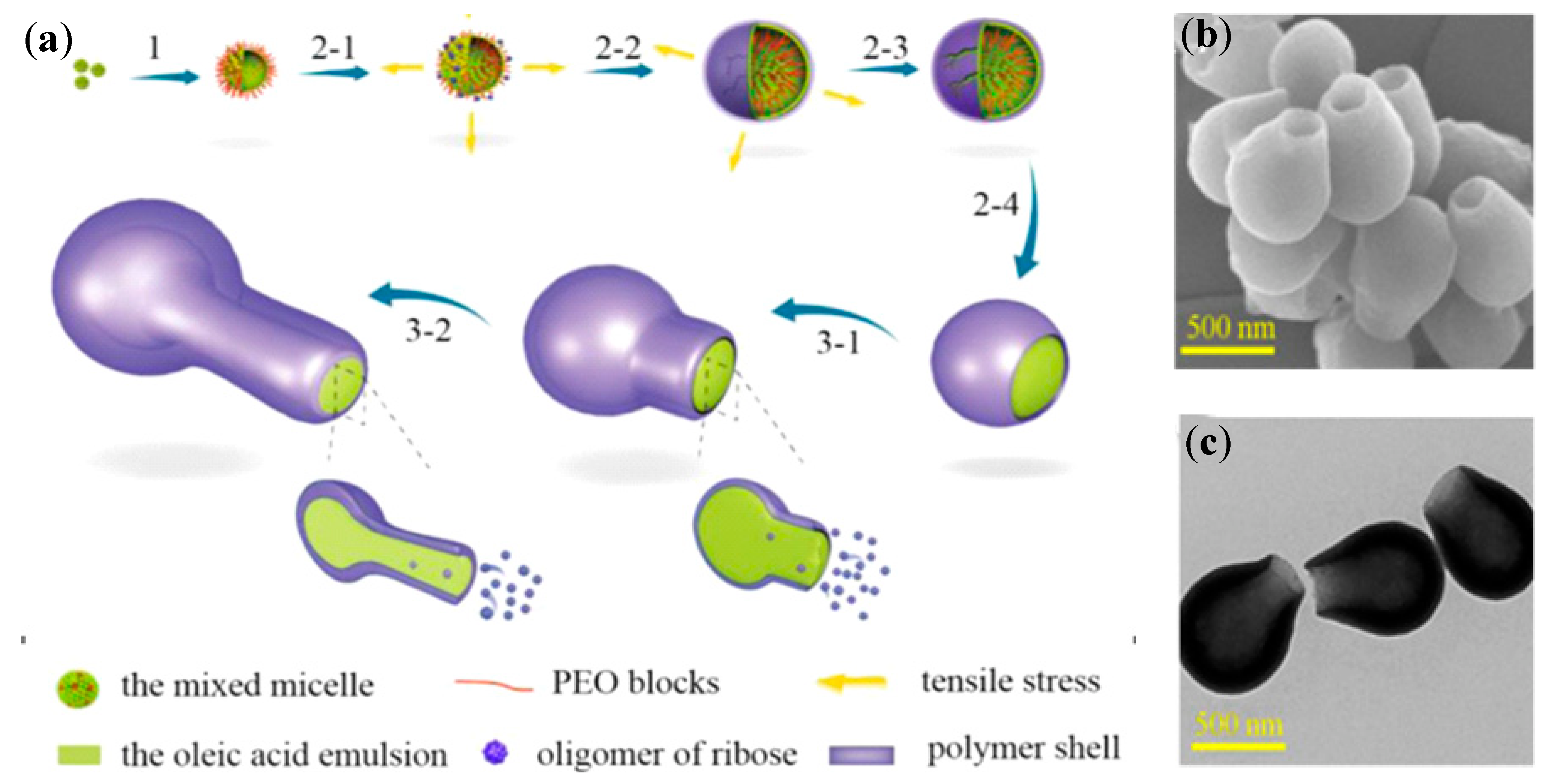
3.1. Soft-Template Method
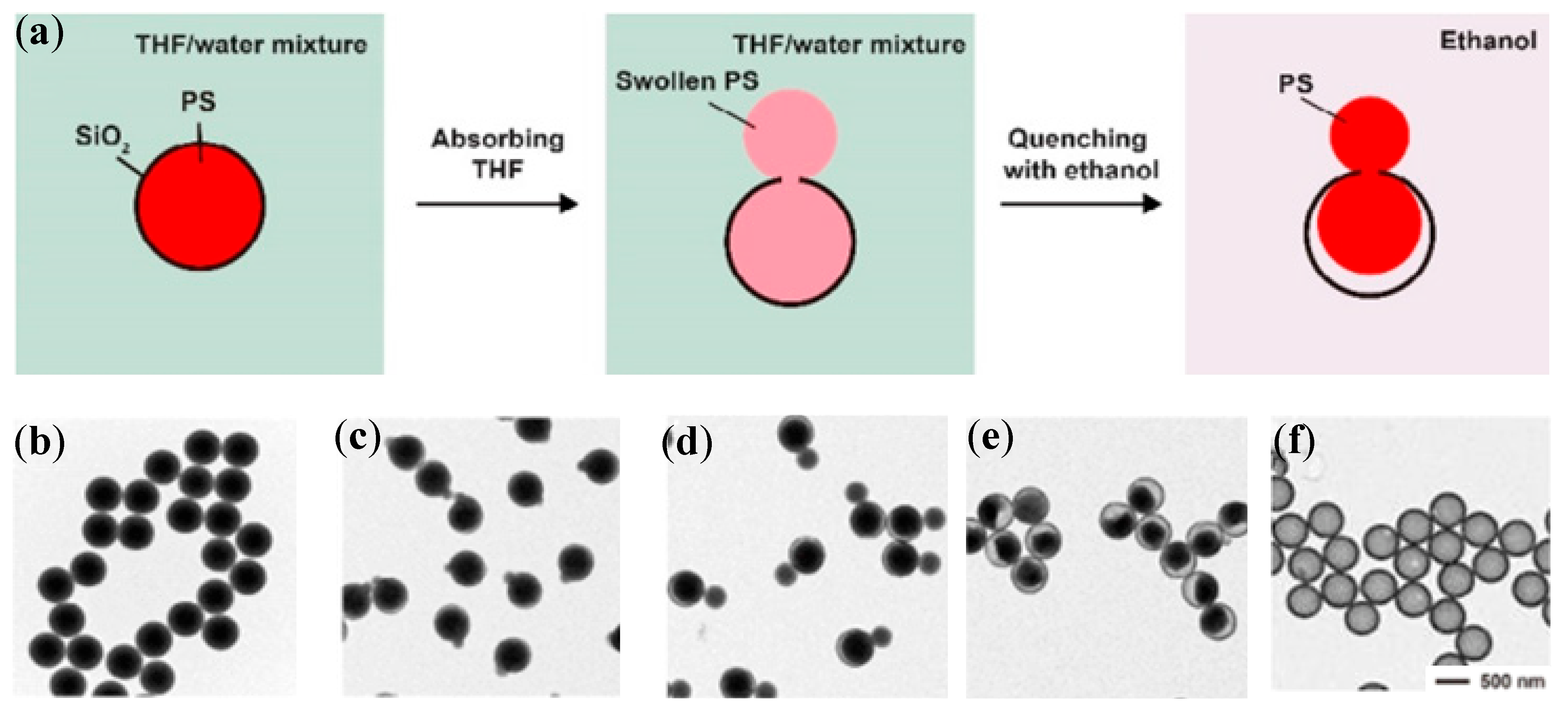
3.2. Swelling-Induced Method
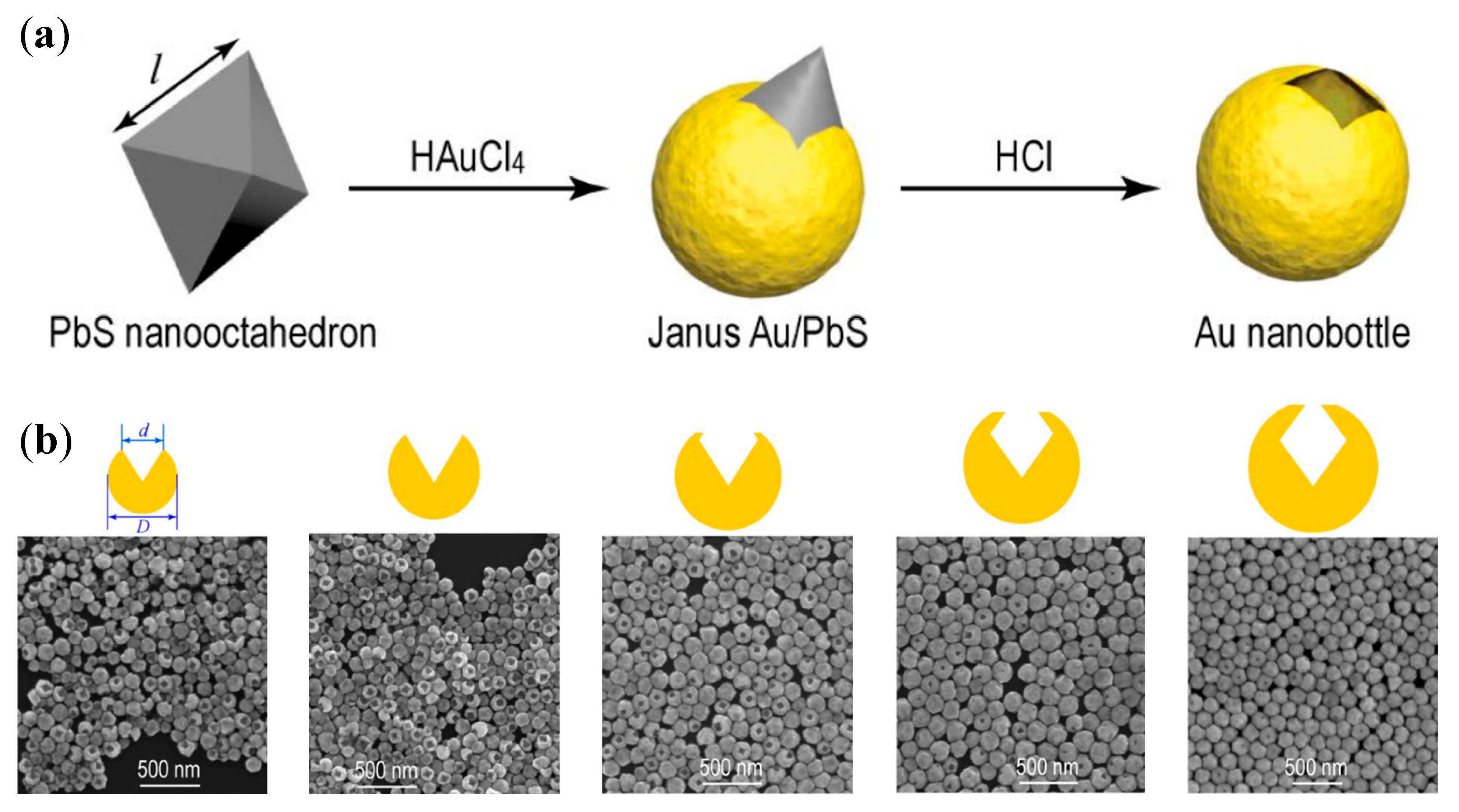
3.3. Wet-Chemistry Method
4. Potential Applications
4.1. Energy
4.2. Environment
4.3. Biomedicine
5. Summary and Outlook
- (1)
- In energy applications, motor speed is crucial for photocatalytic efficiency. The current propulsion methods of nanobottles use a single driving source. Multiple-fields propulsion may provide an effective way to increase the speed of nanobottles. The first is choosing one propulsion method (such as light driving) as the main role, and the other one (e.g., magnetic-field pulsion) as an auxiliary means. The other way is to place the nanobottle in the coupling field to achieve better propulsion. In addition, the prices and properties (e.g., light absorption capacity, surface reaction kinetics) of nanobottle motors materials should be comprehensive and researched in depth, so as to obtain fabrication materials with low cost and high solar energy conversion efficiency. On the other hand, machine learning can design, predict and screen materials without experimentation, which can effectively save time and materials costs [122,123,124,125]. Furthermore, it is important to strengthen the research on catalytic efficiency in sunlight to promote the application of nanobottle motors in practical industrial production.
- (2)
- In terms of environment applications, the hug hurdle is fuel consumption. Improving the motion efficiency as well as precise controlling the structure and performance of nanobottle motors may overcome the problems. Another significant attention is development of eco-friendly nanobottles or design of appropriate recycling methods to avoid secondly pollution in the process of environment monitoring and remediation. The last is the need to be further tested in practical applications (such as the sewage from sewage plant) by using eco-friendly fuels.
- (3)
- For biomedical applications, toxic chemical fuels are strictly forbidden due to the constraints of the human environment. Combination cell derivatives with biocompatible materials could be a possible way to improve the biocompatibility of nanobottles. Moreover, strengthening the research will be focused on how the blood constituents affect the motion of nanobottle motors in the blood stream, as well as through changing the driving source and designing innovative materials with nanobottle motors to improve the mobility in complex physiological environments. Finally, the intellectualization of multiple nanobottles is expected to be achieved for targeted therapy, imaging and diagnosing the location of the disease in vivo, and cleaning of a tumor or microthrombus.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Wang, Z.; Tu, Y.; Chen, Y.; Peng, F. Emerging micro/nanomotor-based platforms for biomedical therapy. Adv. Intell. Syst. 2020, 2, 1900081. [Google Scholar] [CrossRef]
- Safdar, M.; Khan, S.U.; Janis, J. Progress toward catalytic micro-and nanomotors for biomedical and environmental applications. Adv. Mater. 2018, 30, e1703660. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Xiong, Z.; Liu, M.; Li, X.M.; Zheng, J.; Zhan, X.; Ding, W.; Chen, J.; Li, X.; Li, X.D.; et al. Rational design of reversible redox shuttle for highly efficient light-driven microswimmer. ACS Nano 2020, 14, 3272–3280. [Google Scholar] [CrossRef]
- Zhou, H.; Mayorga-Martinez, C.C.; Pane, S.; Zhang, L.; Pumera, M. Magnetically driven micro and nanorobots. Chem. Rev. 2021, 121, 4999–5041. [Google Scholar] [CrossRef] [PubMed]
- Park, S.; Finkelman, L.; Yossifon, G. Enhanced cargo loading of electrically powered metallo-dielectric pollen bearing multiple dielectrophoretic traps. J. Colloid Interface Sci. 2021, 588, 611–618. [Google Scholar] [CrossRef]
- Venugopalan, P.L.; Esteban-Fernandez de Avila, B.; Pal, M.; Ghosh, A.; Wang, J. Fantastic voyage of nanomotors into the cell. ACS Nano. 2020, 14, 9423–9439. [Google Scholar] [CrossRef] [PubMed]
- Soto, F.; Wang, J.; Ahmed, R.; Demirci, U. Medical micro/nanorobots in precision medicine. Adv. Sci. 2020, 7, 2002203. [Google Scholar] [CrossRef]
- Xu, D.; Wang, Y.; Liang, C.; You, Y.; Sanchez, S.; Ma, X. Self-propelled micro/nanomotors for on-demand biomedical cargo transportation. Small 2020, 16, e1902464. [Google Scholar] [CrossRef]
- Moo, J.G.S.; Mayorga-Martinez, C.C.; Wang, H.; Teo, W.Z.; Tan, B.H.; Luong, T.D.; Gonzalez-Avila, S.R.; Ohl, C.-D.; Pumera, M. Bjerknes forces in motion: Long-range translational motion and chiral directionality switching in bubble-propelled micromotors via an ultrasonic pathway. Adv. Funct. Mater. 2018, 28, 1702618. [Google Scholar] [CrossRef]
- Kim, K.; Guo, J.; Liang, Z.; Fan, D. Artificial micro/nanomachines for bioapplications: Biochemical delivery and diagnostic sensing. Adv. Funct. Mater. 2018, 28, 1705867. [Google Scholar] [CrossRef]
- Gao, W.; de Avila, B.E.; Zhang, L.; Wang, J. Targeting and isolation of cancer cells using micro/nanomotors. Adv. Drug Deliv. Rev. 2018, 125, 94–101. [Google Scholar] [CrossRef] [PubMed]
- Zhang, J.; Mou, F.; Wu, Z.; Tang, S.; Xie, H.; You, M.; Liang, X.; Xu, L.; Guan, J. Simple-structured micromotors based on inherent asymmetry in crystalline phases: Design, large-scale preparation, and environmental application. ACS Appl. Mater. Interfaces. 2019, 11, 16639–16646. [Google Scholar] [CrossRef]
- Vilela, D.; Parmar, J.; Zeng, Y.; Zhao, Y.; Sánchez, S. Graphene-based microbots for toxic heavy metal removal and recovery from water. Nano Lett. 2016, 16, 2860–2866. [Google Scholar] [CrossRef] [Green Version]
- Vasantha Ramachandran, R.; Bhat, R.; Kumar Saini, D.; Ghosh, A. Theragnostic nanomotors: Successes and upcoming challenges. Wiley Interdiscip. Rev. Nanomed. Nanobiotechnol. 2021, 13, e1736. [Google Scholar] [CrossRef]
- Karshalev, E.; Esteban-Fernandez de Avila, B.; Wang, J. Micromotors for “chemistry-on-the-fly”. J. Am. Chem. Soc. 2018, 140, 3810–3820. [Google Scholar] [CrossRef]
- Choi, H.; Hwang, B.W.; Park, K.M.; Kim, K.S.; Hahn, S.K. Degradable nanomotors using platinum deposited complex of calcium carbonate and hyaluronate nanogels for targeted drug delivery. Part Part Syst Charact. 2019, 37, 1900418. [Google Scholar] [CrossRef]
- Zhao, F.; Rong, W.; Wang, L.; Sun, L. Magnetic actuated shape-memory helical microswimmers with programmable pecovery behaviors. J. Bionic. Eng. 2021, 18, 799–811. [Google Scholar] [CrossRef]
- Lu, X.; Shen, H.; Wei, Y.; Ge, H.; Wang, J.; Peng, H.; Liu, W. Ultrafast growth and locomotion of dandelion-like microswarms with tubular micromotors. Small 2020, 16, e2003678. [Google Scholar] [CrossRef] [PubMed]
- Ji, Y.; Lin, X.; Zhang, H.; Wu, Y.; Li, J.; He, Q. Thermoresponsive polymer brush modulation on the direction of motion of phoretically driven Janus micromotors. Angew. Chem. Int. Ed. Engl. 2019, 58, 4184–4188. [Google Scholar] [CrossRef]
- Liang, Z.; Teal, D.; Fan, D.E. Light programmable micro/nanomotors with optically tunable in-phase electric polarization. Nat. Commun. 2019, 10, 5275. [Google Scholar] [CrossRef]
- Yao, J.; Ma, Y.; Liu, J.; Liu, S.; Pan, J. Janus-like boronate affinity magnetic molecularly imprinted nanobottles for specific adsorption and fast separation of luteolin. Chem. Eng. J. 2019, 356, 436–444. [Google Scholar] [CrossRef]
- Dai, J.; Cheng, X.; Li, X.; Wang, Z.; Wang, Y.; Zheng, J.; Liu, J.; Chen, J.; Wu, C.; Tang, J. Solution-synthesized multifunctional Janus nanotree microswimmer. Adv. Funct. Mater. 2021, 31, 2106204. [Google Scholar] [CrossRef]
- Xiong, F.; Han, Y.; Wang, S.; Li, G.; Qin, T.; Chen, Y.; Chu, F. Preparation and formation mechanism of renewable lignin hollow nanospheres with a single hole by self-assembly. ACS Sustain. Chem. Eng. 2017, 5, 2273–2281. [Google Scholar] [CrossRef]
- Zhou, C.; Gao, C.; Wu, Y.; Si, T.; Yang, M.; He, Q. Torque-driven orientation motion of chemotactic colloidal motors. Angew. Chem. Int. Ed. Engl. 2022, 61, e202116013. [Google Scholar]
- Lou, Z.; Wang, Y.; Yang, Y.; Wang, Y.; Qin, C.; Liang, R.; Chen, X.; Ye, Z.; Zhu, L. Carbon sphere template derived hollow nanostructure for photocatalysis and gas sensing. Nanomaterials 2020, 10, 378. [Google Scholar] [CrossRef] [Green Version]
- Qiu, J.; Huo, D.; Xia, Y. Phase-change materials for controlled release and related applications. Adv. Mater. 2020, 32, e2000660. [Google Scholar] [CrossRef]
- Ou, J.; Liu, K.; Jiang, J.; Wilson, D.A.; Liu, L.; Wang, F.; Wang, S.; Tu, Y.; Peng, F. Micro-/nanomotors toward biomedical applications: The recent progress in biocompatibility. Small 2020, 16, e1906184. [Google Scholar] [CrossRef]
- Zhang, G.; Yu, Y.; Chen, X.; Han, Y.; Di, Y.; Yang, B.; Xiao, F.; Shen, J. Silica nanobottles templated from functional polymer spheres. J. Colloid Interf Sci. 2003, 263, 467–472. [Google Scholar] [CrossRef]
- Hyun, D.C.; Lu, P.; Choi, S.I.; Jeong, U.; Xia, Y. Microscale polymer bottles corked with a phase-change material for temperature-controlled release. Angew. Chem. Int. Ed. Engl. 2013, 52, 10468–10471. [Google Scholar] [CrossRef] [Green Version]
- Qiu, J.; Xu, J.; Xia, Y. Nanobottles for controlled release and drug delivery. Adv. Healthc. Mater. 2021, 10, e2000587. [Google Scholar] [CrossRef]
- Qiu, J.; Camargo, P.H.C.; Jeong, U.; Xia, Y. Synthesis, transformation, and utilization of monodispersed colloidal spheres. Acc. Chem. Res. 2019, 52, 3475–3487. [Google Scholar] [CrossRef]
- Si, Y.; Chen, M.; Wu, L. Syntheses and biomedical applications of hollow micro-/nano-spheres with large-through-holes. Chem. Soc. Rev. 2016, 45, 690–714. [Google Scholar] [CrossRef]
- Zou, H.; Shang, K. Synthetic strategies for hollow particles with open holes on their surfaces. Mater. Chem. Front. 2021, 5, 3765–3787. [Google Scholar] [CrossRef]
- Liu, M.; Zhao, K. Engineering active micro and nanomotors. Micromachines 2021, 12, 687. [Google Scholar] [CrossRef]
- Wrede, P.; Medina-Sanchez, M.; Fomin, V.M.; Schmidt, O.G. Switching propulsion mechanisms of tubular catalytic micromotors. Small 2021, 17, e2006449. [Google Scholar] [CrossRef]
- Shelke, Y.; Srinivasan, N.R.; Thampi, S.P.; Mani, E. Transition from linear to circular motion in active spherical-cap colloids. Langmuir 2019, 35, 4718–4725. [Google Scholar] [CrossRef]
- Kong, L.; Mayorga-Martinez, C.C.; Guan, J.; Pumera, M. Photocatalytic micromotors activated by UV to visible light for environmental remediation, micropumps, reversible assembly, transportation, and biomimicry. Small 2020, 16, e1903179. [Google Scholar] [CrossRef]
- Suematsu, N.J.; Nakata, S. Evolution of self-propelled objects: From the viewpoint of nonlinear science. Chem. Eur. J. 2018, 24, 6308–6324. [Google Scholar] [CrossRef]
- Moran, J.L.; Posner, J.D. Phoretic self-propulsion. Annu. Rev. Fluid. Mech. 2017, 49, 511–540. [Google Scholar] [CrossRef]
- Wang, Y.; Tu, Y.; Peng, F. The energy conversion behind micro-and nanomotors. Micromachines 2021, 12, 222. [Google Scholar] [CrossRef]
- Zhou, C.; Zhang, H.P.; Tang, J.; Wang, W. Photochemically powered AgCl Janus micromotors as a model system to understand Ionic self-diffusiophoresis. Langmuir 2018, 34, 3289–3295. [Google Scholar] [CrossRef]
- Gao, C.; Zhou, C.; Lin, Z.; Yang, M.; He, Q. Surface wettability-directed propulsion of glucose-powered nanoflask motors. ACS Nano. 2019, 13, 12758–12766. [Google Scholar] [CrossRef] [PubMed]
- Hayakawa, M.; Onoe, H.; Nagai, K.H.; Takinoue, M. Influence of asymmetry and driving forces on the propulsion of bubble-propelled catalytic micromotors. Micromachines 2016, 7, 229. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wu, Y.; Song, Z.; Deng, G.; Jiang, K.; Wang, H.; Zhang, X.; Han, H. Gastric acid powered nanomotors release antibiotics for in vivo treatment of helicobacter pylori infection. Small 2021, 17, e2006877. [Google Scholar] [CrossRef] [PubMed]
- Nourhani, A.; Karshalev, E.; Soto, F.; Wang, J. Multigear bubble propulsion of transient micromotors. Research 2020, 2020, 7823615. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, L.; Chen, B.; Guo, M.; Yang, Q.; Zhang, Y.; Zhang, M. Platinum Janus nanoparticles as peroxidase mimics for catalytic immunosorbent assay. ACS Appl. Nano Mater. 2022, 5, 1397–1407. [Google Scholar] [CrossRef]
- Xu, L.; Mou, F.; Gong, H.; Luo, M.; Guan, J. Light-driven micro/nanomotors: From fundamentals to applications. Chem. Soc. Rev. 2017, 46, 6905–6926. [Google Scholar] [CrossRef] [PubMed]
- Zhan, X.; Zheng, J.; Zhao, Y.; Zhu, B.; Cheng, R.; Wang, J.; Liu, J.; Tang, J.; Tang, J. From strong dichroic nanomotor to polarotactic microswimmer. Adv. Mater. 2019, 31, e1903329. [Google Scholar] [CrossRef]
- Eskandarloo, H.; Kierulf, A.; Abbaspourrad, A. Light-harvesting synthetic nano- and micromotors: A review. Nanoscale 2017, 9, 12218–12230. [Google Scholar] [CrossRef]
- Dong, R.; Cai, Y.; Yang, Y.; Gao, W.; Ren, B. Photocatalytic micro/nanomotors: From construction to applications. Acc. Chem. Res. 2018, 51, 1940–1947. [Google Scholar] [CrossRef] [Green Version]
- Li, Z.; Wang, D.; Gao, H.; Cao, H.; Zhao, Y.; Miao, Z.; Yang, Z.; He, W. Application of double click to prepare near-infrared absorbing dye for photo-thermal tuning of cholesteric liquid crystal. React. Funct. Polym. 2020, 151, 104549. [Google Scholar] [CrossRef]
- Yaguchi, M.; Jia, X.; Schlesinger, R.; Jiang, X.; Ataka, K.; Heberle, J. Near-infrared activation of sensory rhodopsin II mediated by NIR-to-blue upconversion nanoparticles. Front. Mol. Biosci. 2021, 8, 782688. [Google Scholar] [CrossRef]
- Tang, Y.; Wang, G. NIR light-responsive nanocarriers for controlled release. J. Photoch. Photobio. C. 2021, 47, 100420. [Google Scholar] [CrossRef]
- Xuan, M.; Mestre, R.; Gao, C.; Zhou, C.; He, Q.; Sanchez, S. Noncontinuous super-diffusive dynamics of a light-activated nanobottle motor. Angew. Chem. Int. Ed. Engl. 2018, 57, 6838–6842. [Google Scholar] [CrossRef]
- Wu, Z.; Si, T.; Gao, W.; Lin, X.; Wang, J.; He, Q. Superfast near-infrared light-driven polymer multilayer rockets. Small 2016, 12, 577–582. [Google Scholar] [CrossRef]
- Ge, M.; Xu, D.; Chen, Z.; Wei, C.; Zhang, Y.; Yang, C.; Chen, Y.; Lin, H.; Shi, J. Magnetostrictive-piezoelectric-triggered nanocatalytic tumor therapy. Nano Lett. 2021, 21, 6764–6772. [Google Scholar] [CrossRef]
- Peyer, K.E.; Zhang, L.; Nelson, B.J. Bio-inspired magnetic swimming microrobots for biomedical applications. Nanoscale 2013, 5, 1259–1272. [Google Scholar] [CrossRef]
- Wang, B.; Kostarelos, K.; Nelson, B.J.; Zhang, L. Trends in micro-/nanorobotics: Materials development, actuation, localization, and system integration for biomedical applications. Adv. Mater. 2021, 33, e2002047. [Google Scholar] [CrossRef]
- Fernández-Medina, M.; Ramos-Docampo, M.A.; Hovorka, O.; Salgueiriño, V.; Städler, B. Recent advances in nano-and micromotors. Adv. Funct. Mater. 2020, 30, 1908283. [Google Scholar] [CrossRef]
- Li, Y.; Shi, Q.; Luo, Y.; Chu, G.; Zou, H.; Zhang, L.; Sun, B. Hydrothermal controllable synthesis of hollow carbon particles: Reaction-growth mechanism. Chem. Eng. Sci. 2020, 225, 115787. [Google Scholar] [CrossRef]
- Chen, C.; Wang, H.; Han, C.; Deng, J.; Wang, J.; Li, M.; Tang, M.; Jin, H.; Wang, Y. Asymmetric flasklike hollow carbonaceous nanoparticles fabricated by the synergistic interaction between soft Tetmplate and biomass. J. Am. Chem. Soc. 2017, 139, 2657–2663. [Google Scholar] [CrossRef]
- Yi, D.; Zhang, Q.; Liu, Y.; Song, J.; Tang, Y.; Caruso, F.; Wang, Y. Synthesis of chemically asymmetric silica nanobottles and their application for cargo loading and as nanoreactors and nanomotors. Angew. Chem. Int. Ed. Engl. 2016, 55, 14733–14737. [Google Scholar] [CrossRef] [Green Version]
- Zheng, L.; Chen, Q.; Chen, B.; Lin, J. Swelling synthesis and modification of Janus composite particles containing natural urushiol. Mater. Lett. 2014, 120, 271–274. [Google Scholar] [CrossRef]
- Chen, S.R.; Bobrin, V.A.; Jia, Z.; Monteiro, M.J. Temperature-directed formation of anisotropic kettlebell and tadpole nanostructures in the absence of a swelling-induced solvent. Angew. Chem. Int. Ed. Engl. 2022, 61, e202113974. [Google Scholar]
- Liu, Y.; Wang, J.; Shao, Y.; Deng, R.; Zhu, J.; Yang, Z. Recent advances in scalable synthesis and performance of Janus polymer/inorganic nanocomposites. Prog. Mater. Sci. 2022, 124, 100888. [Google Scholar] [CrossRef]
- Qiu, J.; Shi, Y.; Xia, Y. Polydopamine nanobottles with photothermal capability for controlled release and related applications. Adv. Mater. 2021, 33, e2104729. [Google Scholar] [CrossRef]
- Qiu, J.; Chen, Z.; Chi, M.; Xia, Y. Swelling-induced symmetry breaking: A versatile approach to the scalable production of colloidal particles with a Janus structure. Angew. Chem. Int. Ed. Engl. 2021, 60, 12980–12984. [Google Scholar] [CrossRef]
- Xu, L.; Liu, D.; Chen, D.; Liu, H.; Yang, J. Size and shape controlled synthesis of rhodium nanoparticles. Heliyon 2019, 5, e01165. [Google Scholar] [CrossRef] [Green Version]
- Zhang, H.; Chen, J.; Li, N.; Jiang, R.; Zhu, X.M.; Wang, J. Au nanobottles with synthetically tunable overall and opening sizes for chemo-photothermal combined therapy. ACS Appl. Mater. Interfaces. 2019, 11, 5353–5363. [Google Scholar] [CrossRef]
- Jiang, R.; Qin, F.; Liu, Y.; Ling, X.Y.; Guo, J.; Tang, M.; Cheng, S.; Wang, J. Colloidal gold nanocups with orientation-dependent plasmonic properties. Adv. Mater. 2016, 28, 6322–6331. [Google Scholar] [CrossRef]
- Jeong, S.; Song, J.; Lee, S. Photoelectrochemical device designs toward practical solar water splitting: A review on the recent progress of BiVO4 and BiFeO3 photoanodes. Appl. Sci. 2018, 8, 1388. [Google Scholar] [CrossRef] [Green Version]
- Zhang, F.Q.; Hu, Y.; Sun, R.N.; Fu, H.; Peng, K.Q. Gold-sensitized silicon/ZnO core/shell nanowire array for solar water splitting. Front. Chem. 2019, 7, 206. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Tsang, S.C.E. Recent progress and strategies for enhancing photocatalytic water splitting. Mater. Today Sustain. 2020, 9, 100032. [Google Scholar] [CrossRef]
- Wang, Z.; Li, C.; Domen, K. Recent developments in heterogeneous photocatalysts for solar-driven overall water splitting. Chem. Soc. Rev. 2019, 48, 2109–2125. [Google Scholar] [CrossRef] [PubMed]
- Humayun, M.; Ullah, H.; Usman, M.; Habibi-Yangjeh, A.; Tahir, A.A.; Wang, C.; Luo, W. Perovskite-type lanthanum ferrite based photocatalysts: Preparation, properties, and applications. J. Energy Chem. 2022, 66, 314–338. [Google Scholar] [CrossRef]
- Wang, W.; Huang, X.; Lai, M.; Lu, C. RGO/TiO2 nanosheets immobilized on magnetically actuated artificial cilia film: A new mode for efficient photocatalytic reaction. RSC Adv. 2017, 7, 10517–10523. [Google Scholar] [CrossRef] [Green Version]
- Peng, F.; Zhou, Q.; Lu, C.; Ni, Y.; Kou, J.; Xu, Z. Construction of (001) facets exposed ZnO nanosheets on magnetically driven cilia film for highly active photocatalysis. Appl. Surf. Sci. 2017, 394, 115–124. [Google Scholar] [CrossRef]
- Peng, F.; Ni, Y.; Zhou, Q.; Lu, C.; Kou, J.; Xu, Z. Design of inner-motile ZnO@TiO2 mushroom arrays on magnetic cilia film with enhanced photocatalytic performance. J. Photoch. Photobio. A 2017, 332, 150–157. [Google Scholar] [CrossRef]
- Wu, Y.; Dong, R.; Zhang, Q.; Ren, B. Dye-enhanced self-electrophoretic propulsion of light-driven TiO2-Au Janus micromotors. Nanomicro Lett. 2017, 9, 30. [Google Scholar] [CrossRef] [Green Version]
- Dong, Y.; Yi, C.; Yang, S.; Wang, J.; Chen, P.; Liu, X.; Du, W.; Wang, S.; Liu, B.F. A substrate-free graphene oxide-based micromotor for rapid adsorption of antibiotics. Nanoscale 2019, 11, 4562–4570. [Google Scholar] [CrossRef]
- Mou, F.; Kong, L.; Chen, C.; Chen, Z.; Xu, L.; Guan, J. Light-controlled propulsion, aggregation and separation of water-fuelled TiO2/Pt Janus submicromotors and their “on-the-fly” photocatalytic activities. Nanoscale 2016, 8, 4976–4983. [Google Scholar] [CrossRef]
- Dong, R.; Hu, Y.; Wu, Y.; Gao, W.; Ren, B.; Wang, Q.; Cai, Y. Visible-light-driven BiOI-based Janus micromotor in pure water. J. Am. Chem. Soc. 2017, 139, 1722–1725. [Google Scholar] [CrossRef]
- Dong, T.; Sun, M.; Hu, K.; Wang, Q.; Lu, C.; Kou, J. Self-propelled jet carbon micromotor enhanced photocatalytic performance for water splitting. Int. J. Hydrogen. Energ. 2021, 46, 17187–17196. [Google Scholar] [CrossRef]
- Yan, M.; Ma, D.; Qiu, B.; Liu, T.; Xie, L.; Zeng, J.; Liang, K.; Xin, H.; Lian, Z.; Jiang, L.; et al. Superassembled hierarchical asymmetric magnetic mesoporous nanorobots driven by smart confined catalytic degradation. Chem. Eur. J. 2022, 28, e202200307. [Google Scholar] [CrossRef]
- Zhou, C.; Gao, C.; Lin, Z.; Wang, D.; Li, Y.; Yuan, Y.; Zhu, B.; He, Q. Autonomous motion of bubble-powered carbonaceous nanoflask motors. Langmuir 2020, 36, 7039–7045. [Google Scholar] [CrossRef]
- Kumar, L.; Ragunathan, V.; Chugh, M.; Bharadvaja, N. Nanomaterials for remediation of contaminants: A review. Environ Chem Lett. 2021, 19, 3139–3163. [Google Scholar] [CrossRef]
- Egbueri, J.C.; Unigwe, C.O. Understanding the extent of heavy metal pollution in drinking water supplies from umunya, nigeria: An indexical and statistical assessment. Anal. Lett. 2020, 53, 2122–2144. [Google Scholar] [CrossRef]
- Saravanan, A.; Senthil Kumar, P.; Jeevanantham, S.; Karishma, S.; Tajsabreen, B.; Yaashikaa, P.R.; Reshma, B. Effective water/wastewater treatment methodologies for toxic pollutants removal: Processes and applications towards sustainable development. Chemosphere 2021, 280, 130595. [Google Scholar] [CrossRef]
- Worthington, M.J.H.; Shearer, C.J.; Esdaile, L.J.; Campbell, J.A.; Gibson, C.T.; Legg, S.K.; Yin, Y.; Lundquist, N.A.; Gascooke, J.R.; Albuquerque, I.S.; et al. Sustainable polysulfides for oil spill remediation: Repurposing industrial waste for environmental benefit. Adv. Sustain. Syst. 2018, 2, 1800024. [Google Scholar] [CrossRef] [Green Version]
- Ji, M.; Liu, Z.; Sun, K.; Li, Z.; Fan, X.; Li, Q. Bacteriophages in water pollution control: Advantages and limitations. Front. Environ. Sci. Eng. 2021, 15, 84. [Google Scholar] [CrossRef]
- Bhatt, P.; Pathak, V.M.; Bagheri, A.R.; Bilal, M. Microplastic contaminants in the aqueous environment, fate, toxicity consequences, and remediation strategies. Environ. Res. 2021, 200, 111762. [Google Scholar] [CrossRef]
- Verma, B.; Balomajumder, C. Surface modification of one-dimensional carbon nanotubes: A review for the management of heavy metals in wastewater. Environ. Technol. Innov. 2020, 17, 100596. [Google Scholar] [CrossRef]
- Khin, M.M.; Nair, A.S.; Babu, V.J.; Murugan, R.; Ramakrishna, S. A review on nanomaterials for environmental remediation. Energ. Environ. Sci. 2012, 5, 8075. [Google Scholar] [CrossRef]
- Verma, B.; Gumfekar, S.P.; Sabapathy, M. A critical review on micro-and nanomotors: Application towards wastewater treatment. Can. J. Chem. Eng. 2021, 100, 540–558. [Google Scholar] [CrossRef]
- Peng, H.; Guo, J. Removal of chromium from wastewater by membrane filtration, chemical precipitation, ion exchange, adsorption electrocoagulation, electrochemical reduction, electrodialysis, electrodeionization, photocatalysis and nanotechnology: A review. Environ. Chem Lett. 2020, 18, 2055–2068. [Google Scholar] [CrossRef]
- Soler, L.; Sanchez, S. Catalytic nanomotors for environmental monitoring and water remediation. Nanoscale 2014, 6, 7175–7182. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sun, M.; Chen, W.; Fan, X.; Tian, C.; Sun, L.; Xie, H. Cooperative recyclable magnetic microsubmarines for oil and microplastics removal from water. Appl. Mater. Today 2020, 20, 100682. [Google Scholar] [CrossRef]
- Taha, M.R.; Mobasser, S. Adsorption of DDT and PCB by nanomaterials from residual soil. PLoS ONE. 2015, 10, e0144071. [Google Scholar] [CrossRef]
- Taha, M.R.; Mobasser, S. Adsorption of DDT from contaminated soil using carbon nanotubes. Soil Sediment Contam. 2014, 23, 703–714. [Google Scholar] [CrossRef]
- Yuan, K.; Asunción-Nadal, V.d.l.; Li, Y.; Jurado-Sánchez, B.; Escarpa, A. Graphdiyne tubular micromotors: Electrosynthesis, characterization and self-propelled capabilities. Appl. Mater. Today 2020, 20, 100743. [Google Scholar] [CrossRef]
- Safdar, M.; Simmchen, J.; Jänis, J. Light-driven micro-and nanomotors for environmental remediation. Environ Sci. Nano. 2017, 4, 1602–1616. [Google Scholar] [CrossRef]
- Ying, Y.; Pumera, M. Micro/nanomotors for water purification. Chem. Eur. J. 2019, 25, 106–121. [Google Scholar] [CrossRef]
- Ye, H.; Wang, Y.; Xu, D.; Liu, X.; Liu, S.; Ma, X. Design and fabrication of micro/nano-motors for environmental and sensing applications. Appl. Mater. Today 2021, 23, 101007. [Google Scholar] [CrossRef]
- Qiu, B.; Xie, L.; Zeng, J.; Liu, T.; Yan, M.; Zhou, S.; Liang, Q.; Tang, J.; Liang, K.; Kong, B. Interfacially super-assembled asymmetric and H2O2 sensitive multilayer-sandwich nagnetic nesoporous silica nanomotors for detecting and Removing heavy metal ions. Adv. Funct. Mater. 2021, 31, 2010694. [Google Scholar] [CrossRef]
- Mou, F.; Pan, D.; Chen, C.; Gao, Y.; Xu, L.; Guan, J. Magnetically modulated pot-like MnFe2O4 micromotors: Nanoparticle assembly fabrication and their capability for direct oil removal. Adv. Funct. Mater. 2015, 25, 6173–6181. [Google Scholar] [CrossRef]
- Lv, J.; Xing, Y.; Xu, T.; Zhang, X.; Du, X. Advanced micro/nanomotors for enhanced bioadhesion and tissue penetration. Appl. Mater. Today 2021, 23, 101034. [Google Scholar] [CrossRef]
- Edis, Z.; Wang, J.; Waqas, M.K.; Ijaz, M.; Ijaz, M. Nanocarriers-mediated drug delivery systems for anticancer agents: An Overview and perspectives. Int. J. Nanomed. 2021, 16, 1313–1330. [Google Scholar] [CrossRef]
- Saeki, H.; Sohda, M.; Sakai, M.; Sano, A.; Shirabe, K. Role of surgery in multidisciplinary treatment strategies for locally advanced esophageal squamous cell carcinoma. Ann. Gastroenterol. Surg. 2020, 4, 490–497. [Google Scholar] [CrossRef]
- Wilhelm, S.; Tavares, A.J.; Dai, Q.; Ohta, S.; Audet, J.; Dvorak, H.F.; Chan, W.C.W. Analysis of nanoparticle delivery to tumours. Nat. Rev. Mater. 2016, 1, 16014. [Google Scholar] [CrossRef]
- Ma, Z.; Jia, X.; Bai, J.; Ruan, Y.; Wang, C.; Li, J.; Zhang, M.; Jiang, X. MnO2Gatekeeper: An intelligent and O2-evolving shell for preventing premature release of high cargo payload core, overcoming tumor hypoxia, and acidic H2O2-sensitive MRI. Adv. Funct. Mater. 2017, 27, 1604258. [Google Scholar] [CrossRef]
- Rizvi, S.A.A.; Saleh, A.M. Applications of nanoparticle systems in drug delivery technology. Saudi Pharm. J. 2018, 26, 64–70. [Google Scholar] [CrossRef] [PubMed]
- Martinelli, C.; Pucci, C.; Ciofani, G. Nanostructured carriers as innovative tools for cancer diagnosis and therapy. APL Bioeng. 2019, 3, 011502. [Google Scholar] [CrossRef] [PubMed]
- Lin, R.; Yu, W.; Chen, X.; Gao, H. Self-propelled micro/nanomotors for tumor targeting delivery and terapy. Adv. Healthc. Mater. 2021, 10, e2001212. [Google Scholar]
- Agrahari, V.; Agrahari, V.; Chou, M.L.; Chew, C.H.; Noll, J.; Burnouf, T. Intelligent micro-/nanorobots as drug and cell carrier devices for biomedical therapeutic advancement: Promising development opportunities and translational challenges. Biomaterials 2020, 260, 120163. [Google Scholar] [CrossRef]
- Reinisova, L.; Hermanova, S.; Pumera, M. Micro/nanomachines: What is needed for them to become a real force in cancer therapy? Nanoscale 2019, 11, 6519–6532. [Google Scholar] [CrossRef]
- Lim, S.-h.; Sohn, S.W.; Lee, H.; Choi, D.; Jang, E.; Kim, M.; Lee, J.; Park, S. Analysis and evaluation of path planning algorithms for autonomous driving of electromagnetically actuated microrobot. Int. J. Control. Autom. 2020, 18, 2943–2954. [Google Scholar] [CrossRef]
- Liu, K.; Ou, J.; Wang, S.; Gao, J.; Liu, L.; Ye, Y.; Wilson, D.A.; Hu, Y.; Peng, F.; Tu, Y. Magnesium-based micromotors for enhanced active and synergistic hydrogen chemotherapy. Appl. Mater. Today 2020, 20, 100694. [Google Scholar] [CrossRef]
- Soto, F.; Kupor, D.; Lopez-Ramirez, M.A.; Wei, F.; Karshalev, E.; Tang, S.; Tehrani, F.; Wang, J. Onion-like multifunctional microtrap vehicles for attraction-trapping-destruction of biological threats. Angew. Chem. Int. Ed. Engl. 2020, 59, 3480–3485. [Google Scholar] [CrossRef]
- Rahman, M.A.; Cheng, J.; Wang, Z.; Ohta, A.T. Cooperative micromanipulation using the independent actuation of fifty microrobots in parallel. Sci. Rep. 2017, 7, 3278. [Google Scholar] [CrossRef] [Green Version]
- Mahmood, A.; Irfan, A.; Wang, J.-L. Machine learning and molecular dynamics simulation-assisted evolutionary design and discovery pipeline to screen efficient small molecule acceptors for PTB7-Th-based organic solar cells with over 15% efficiency. J. Mater. Chem. A. 2022, 10, 4170–4180. [Google Scholar] [CrossRef]
- Mahmood, A.; Irfan, A.; Wang, J.-L. Machine learning for organic photovoltaic polymers: A minireview. Chin. J Polym Sci. 2022, 40, 870–876. [Google Scholar] [CrossRef]
- Mahmood, A.; Wang, J.-L. A time and resource efficient machine learning assisted design of non-fullerene small molecule acceptors for P3HT-based organic solar cells and green solvent selection. J. Mater. Chem. A. 2021, 9, 15684–15695. [Google Scholar] [CrossRef]
- Mahmood, A.; Irfan, A.; Wang, J.L. Developing efficient small molecule acceptors with sp(2) -hybridized nitrogen at different positions by density functional theory calculations, molecular dynamics simulations and machine learning. Chem. 2022, 28, e202103712. [Google Scholar] [CrossRef]
- Wei, X.; Beltran-Gastelum, M.; Karshalev, E.; Esteban-Fernandez de Avila, B.; Zhou, J.; Ran, D.; Angsantikul, P.; Fang, R.H.; Wang, J.; Zhang, L. Biomimetic micromotor enables active delivery of antigens for oral vaccination. Nano Lett. 2019, 19, 1914–1921. [Google Scholar] [CrossRef]
- Qiu, J.; Huo, D.; Xue, J.; Zhu, G.; Liu, H.; Xia, Y. Encapsulation of a phase-change material in nanocapsules with a well-defined hole in the wall for the controlled release of drugs. Angew. Chem. Int. Engl. 2019, 58, 10606–10611. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Materials | Variables | Basic Steps |
|---|---|---|---|
| Soft- template | Ribose Oleic acid Poly (ethylene oxide)-poly (propylene oxide)-poly (ethylene oxide) | Temperature Reaction time |
|
| Swelling- inducement | Polystyrene microspheres SiO2 Ethanol | Pressure Volumetric percentage of solute in tetrahydrofuran/water |
|
| Wet-chemistry synthetic | Acetate Thioacetamide Cetyltrimethyl ammonium bromid Au PbS Weak acids | Au/PbS ratio |
|
| Field | Represent Examples | Materials Involved | Principle |
|---|---|---|---|
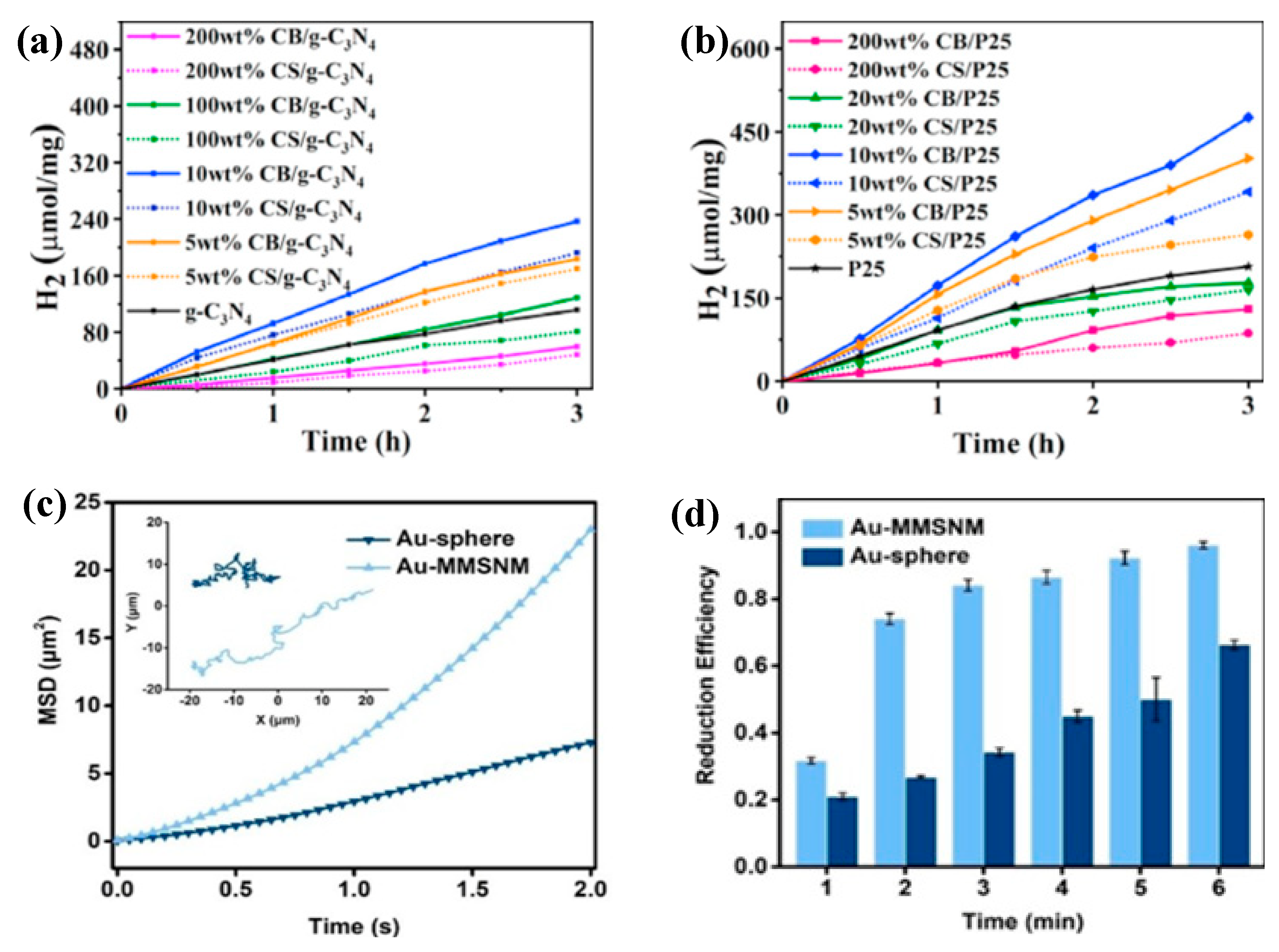
| Energy | Solar water splitting | Carbon | Large specific surface area, low density, accelerates the mass transfer rate through motion [37] |
| Photocatalytic | Silica, Au, Fe3O4 | Introduces chemically active ingredients, accelerates the mass transfer rate through motion [43] | |
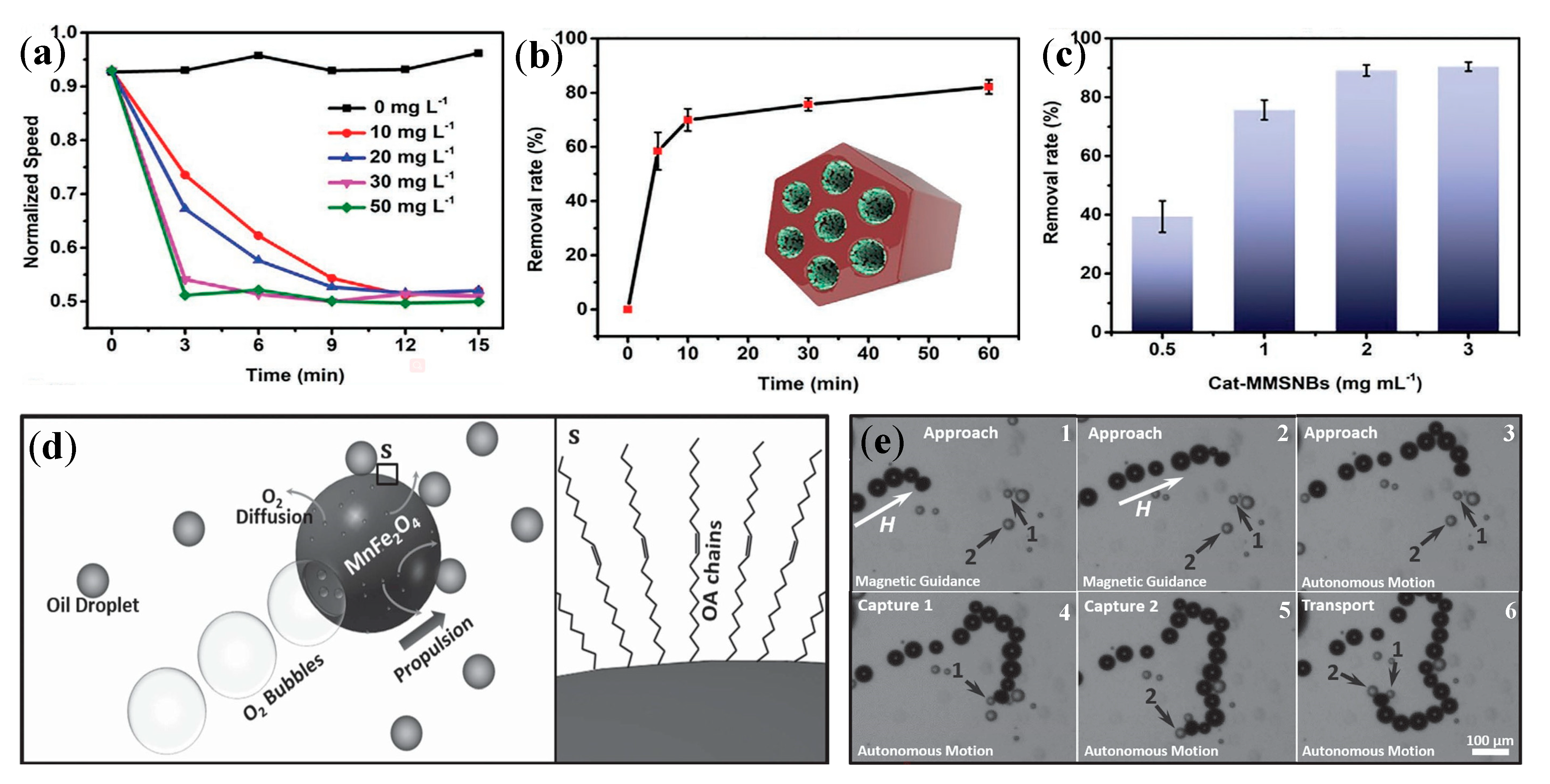
| Environment | Environment monitoring | MnFe2O4 | The motion of nanobottle motors in the solution can grab the target molecule or ion [38] |
| Environment Remediation | Magnetic silica | Large specific surface area of nanobottle motors has affinity for organic pollutants [106] | |
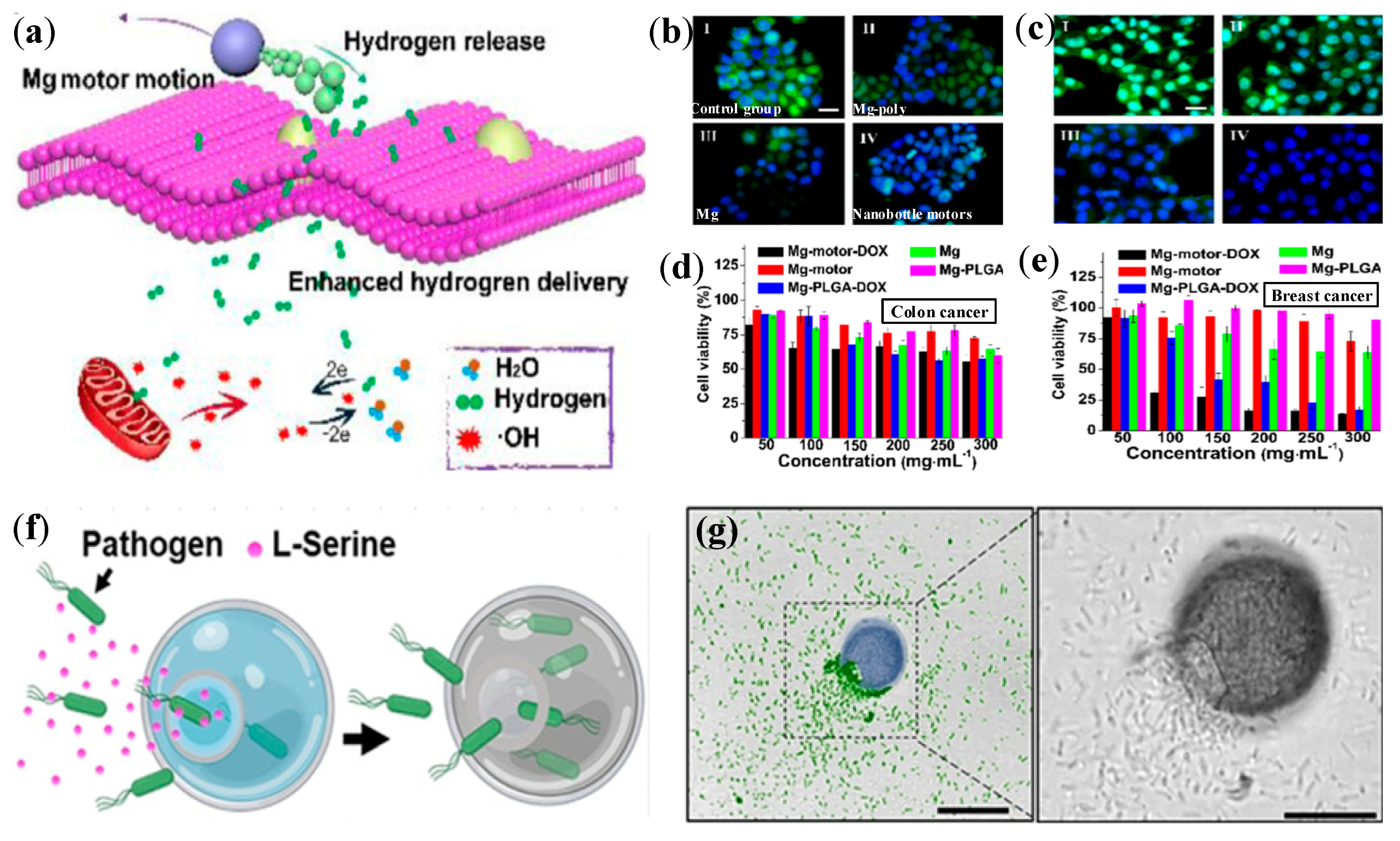
| Biomedicine | Targeted therapy | Mg | Great performance of drug loading, tissue penetration and biocompatibility [39] |
| Trapping pathogens | Mg | The Mg core is depleted, the exposed inner surface dissolves, releasing chemoattractant [118] | |
| Drug delivery | MgTiO2 | Bubble propulsion [120] | |
| Photothermal therapy (PTT) | Au | Photothermal conversion [40] | |
| Treat gastroenteric diseases | Silica | The reaction of CaO2 with gastric juice neutralizes gastric acid [52] | |
| Drug loading and controlled release | Phase-change material (PCM) | Controlling the temperature causes the phase-change material blocking the hole to change the state of the phase [29,121] |
| Propulsion | Mechanism | Fabrication Method | Feature | Potential Applications | Advantages | Challenges |
|---|---|---|---|---|---|---|
| Chemical propulsion | Bubbles separated from motor | Soft-template method | Self-assembly between precursor molecules and core templates. The fabrication makes it easy to control morphology. | Solar water splitting/Photocatalytic |
|
|
| Asymmetrical concentration gradient | ||||||
| Light driving | Asymmetric temperature gradient | Swelling- inducement method | Swelling polymer microspheres with organic solvent and then quenching with ethanol. Opening structure is obtained through diffusion of emulsion solvent from inside of nanoparticle. | Environment monitoring/ Remediation |
|
|
| Magnetic actuation | Apply magnetic force or torque to magnetized motors. | Wet-chemistry synthetic method | Controlling reaction dynamics and thermodynamic parameters to control the sizes and shapes of noble metal nanobottles. A facile and robust method. | Targeted therapy/Trapping pathogens |
|
|
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Q.; Wang, L.; Wang, K.; Wang, T.; Liu, G. Principle, Fabrication and Emerging Applications of Nanobottle Motor. Energies 2022, 15, 7636. https://doi.org/10.3390/en15207636
Liu Q, Wang L, Wang K, Wang T, Liu G. Principle, Fabrication and Emerging Applications of Nanobottle Motor. Energies. 2022; 15(20):7636. https://doi.org/10.3390/en15207636
Chicago/Turabian StyleLiu, Qingyuan, Lin Wang, Kaiying Wang, Tianhu Wang, and Guohua Liu. 2022. "Principle, Fabrication and Emerging Applications of Nanobottle Motor" Energies 15, no. 20: 7636. https://doi.org/10.3390/en15207636