
Passivity-Based Control of Dual Active Bridge Converter in Constant Power Load Condition

Abstract
:1. Introduction
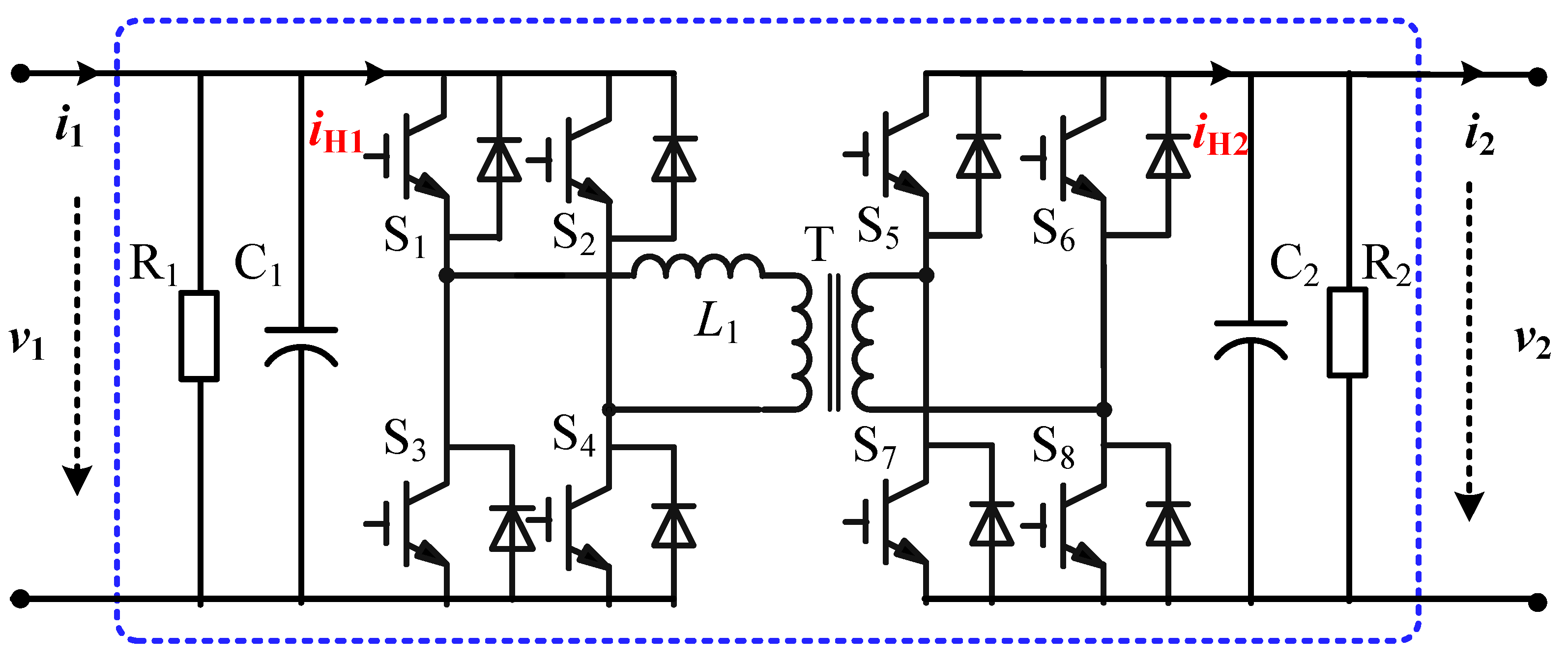
2. Topology Analysis
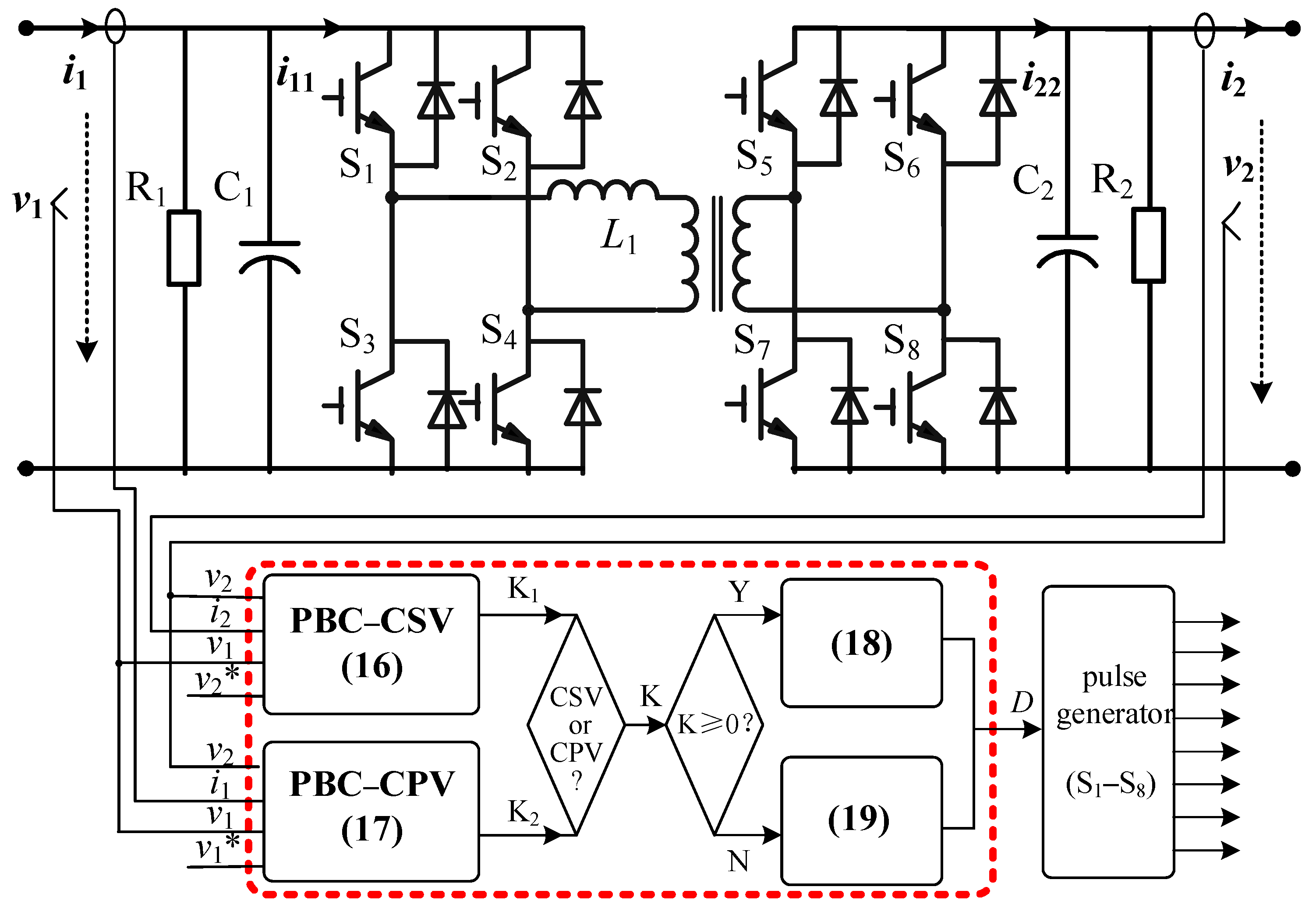
3. PBC Controller Design
3.1. Passivity Analysis
3.2. Stability Analysis
3.3. Controller Design
3.4. Closed-Loop System Stability Analysis
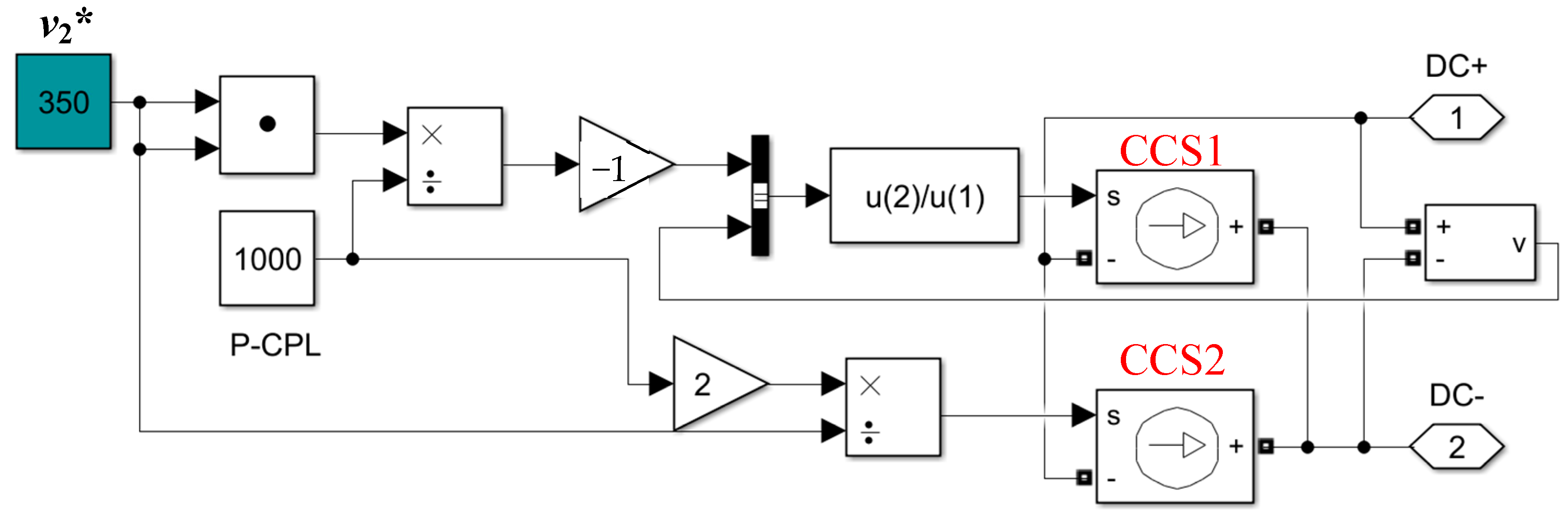
4. Simulation
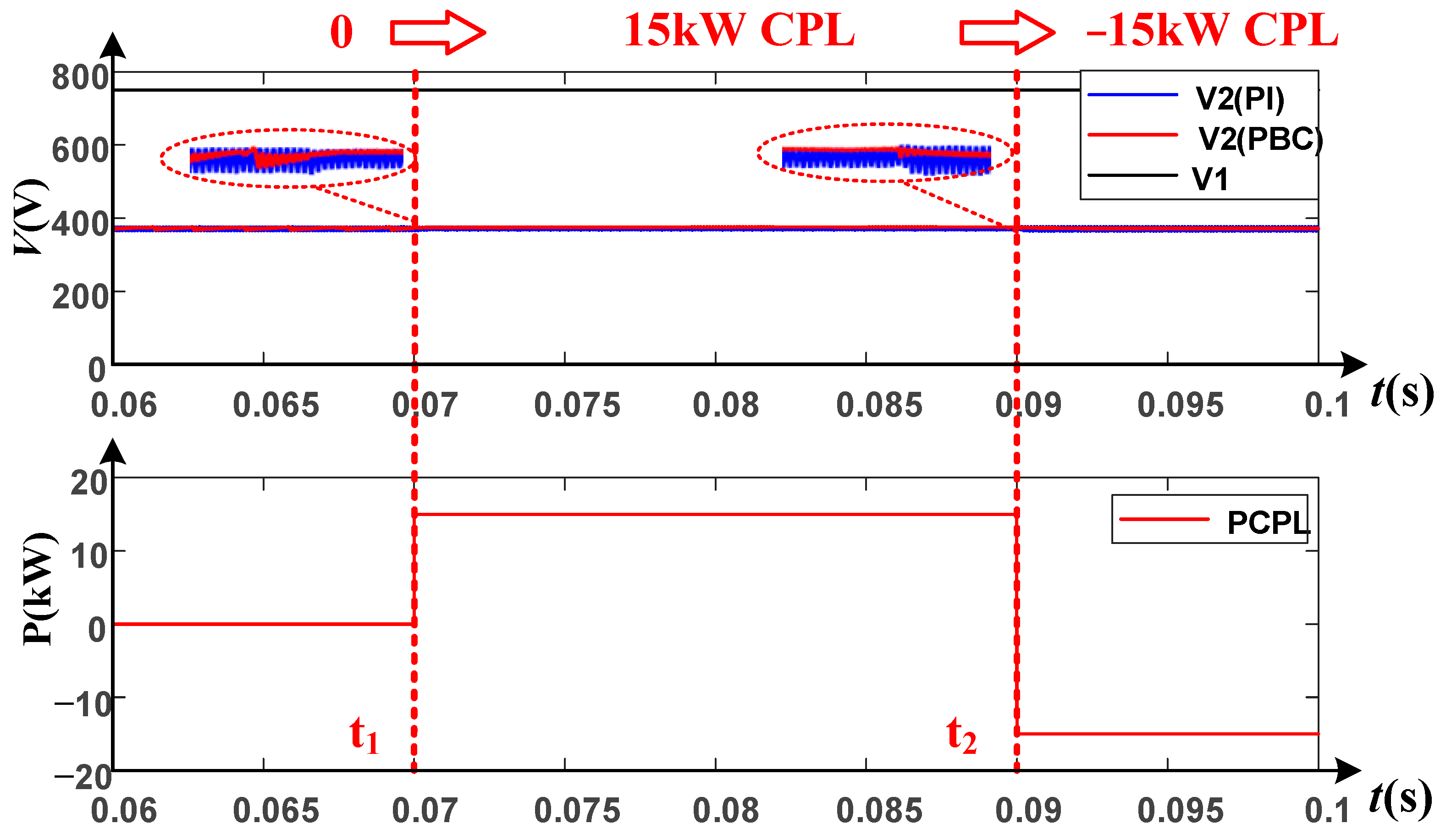
4.1. CPL Perturbation Simulation
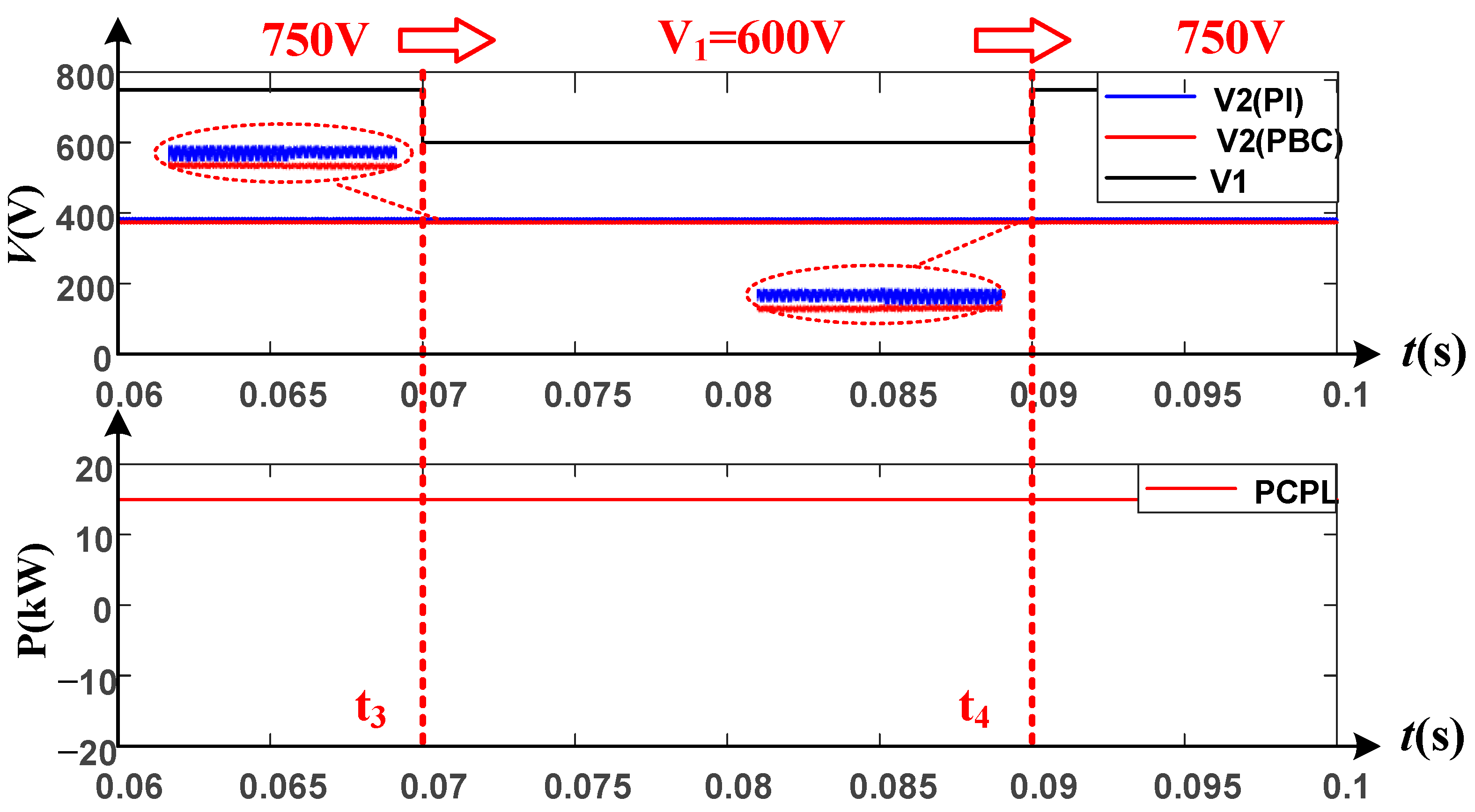
4.2. Source Perturbation Simulation
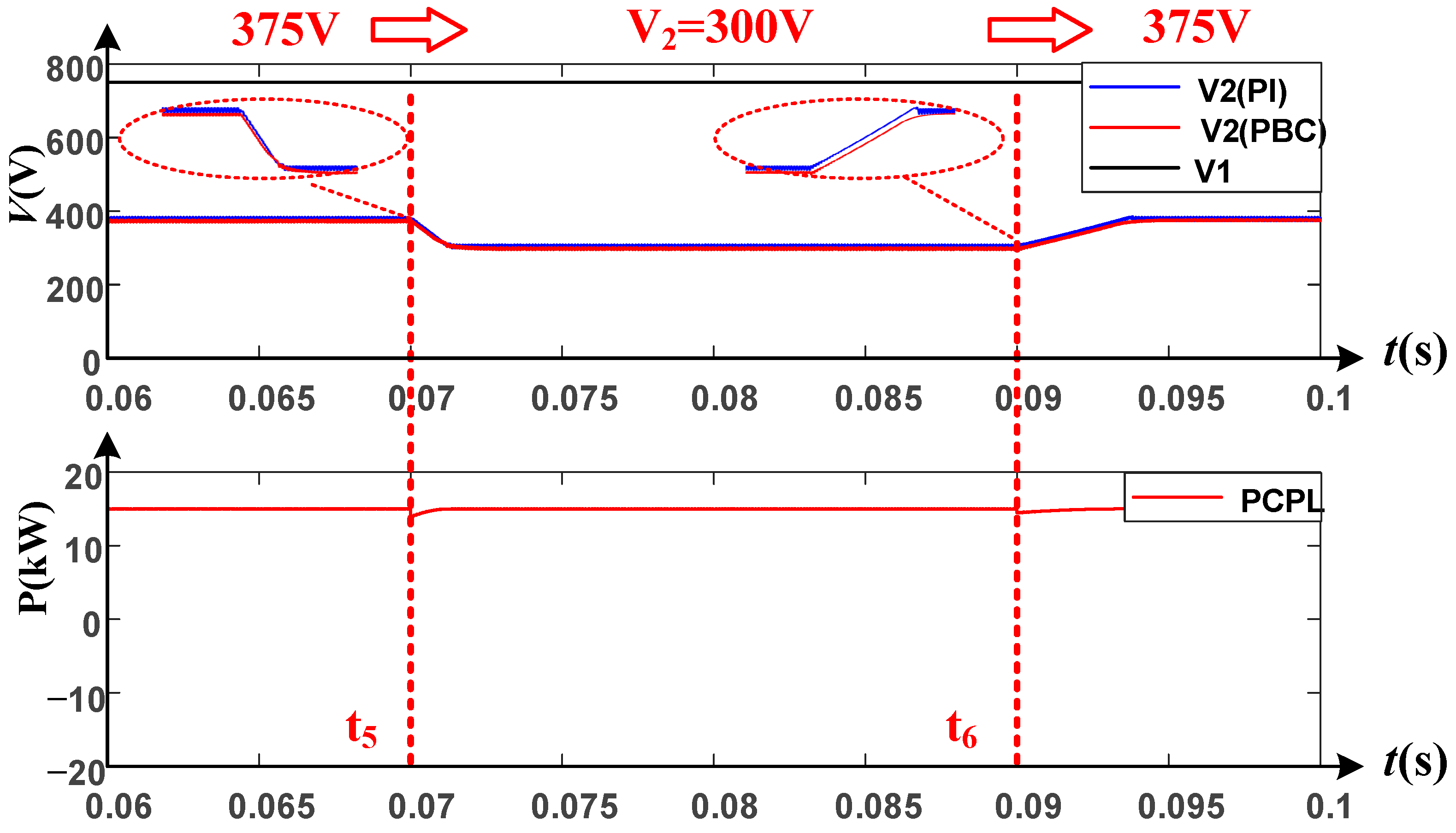
4.3. Voltage Reference Step Simulation
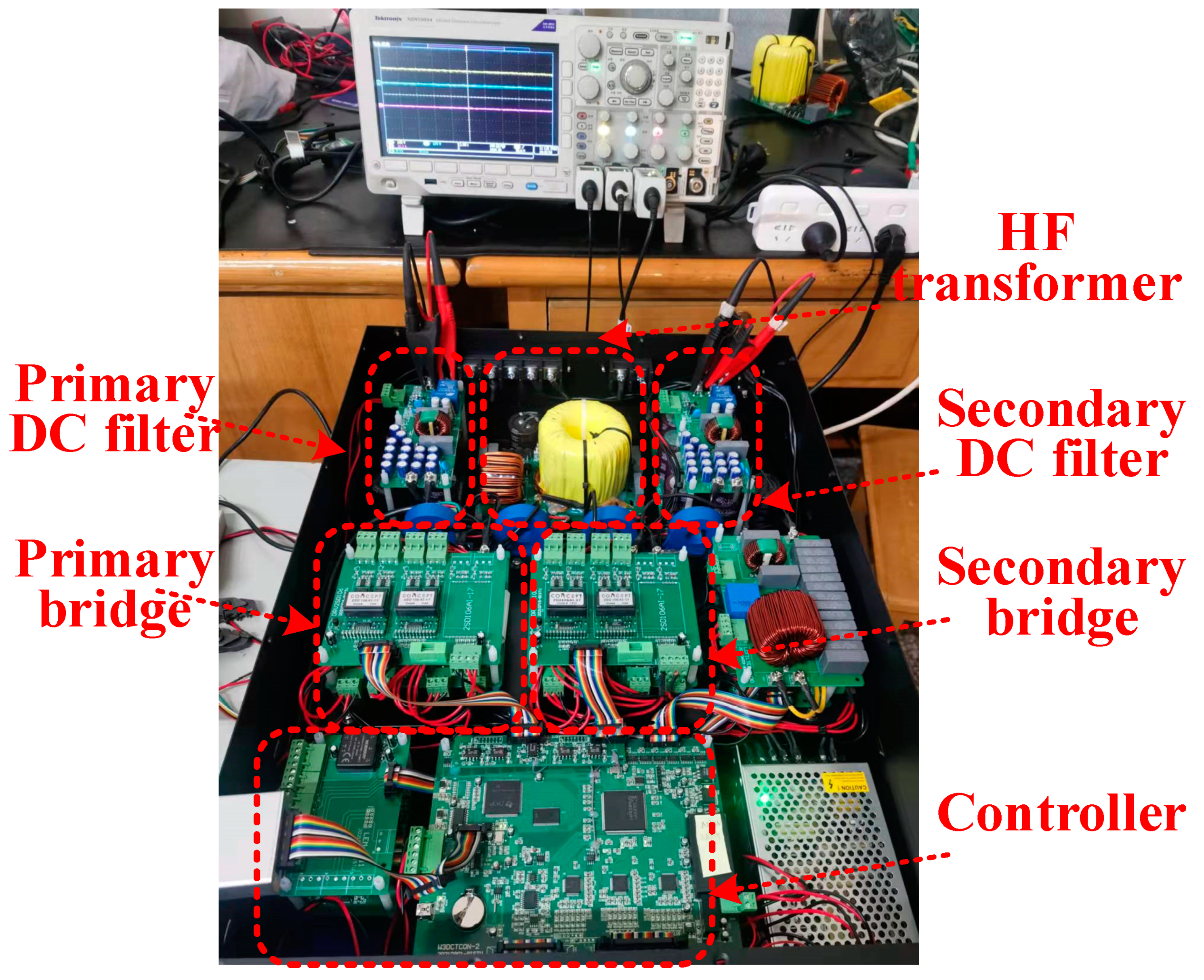
5. Experiment
5.1. Starting Experiment
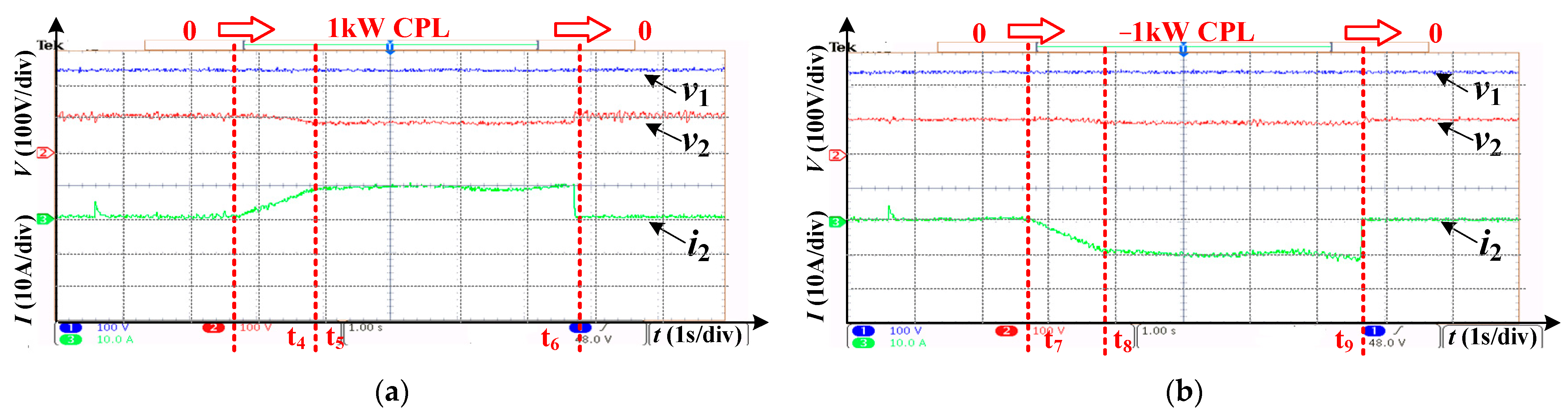
5.2. CPL Perturbation Experiment
5.3. Source Perturbation Experiment
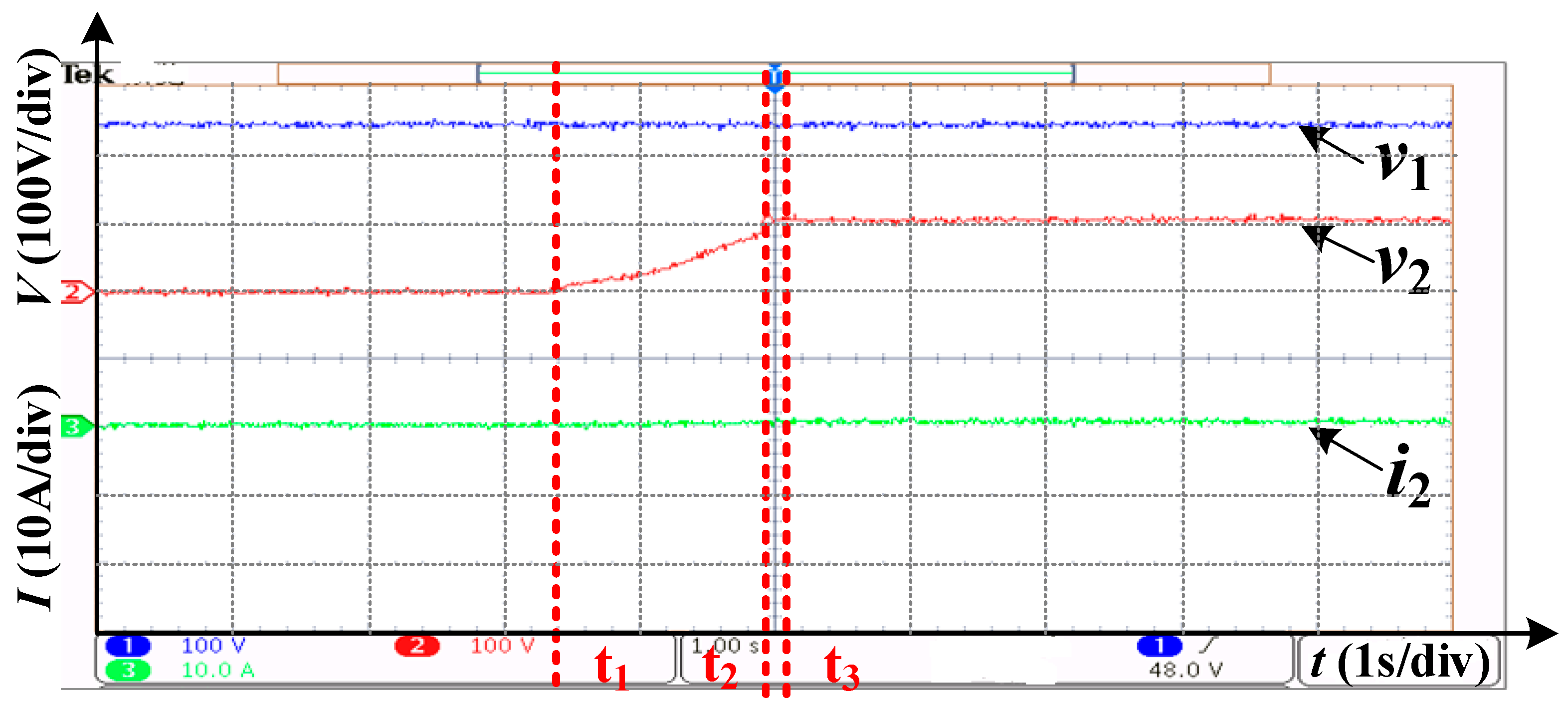
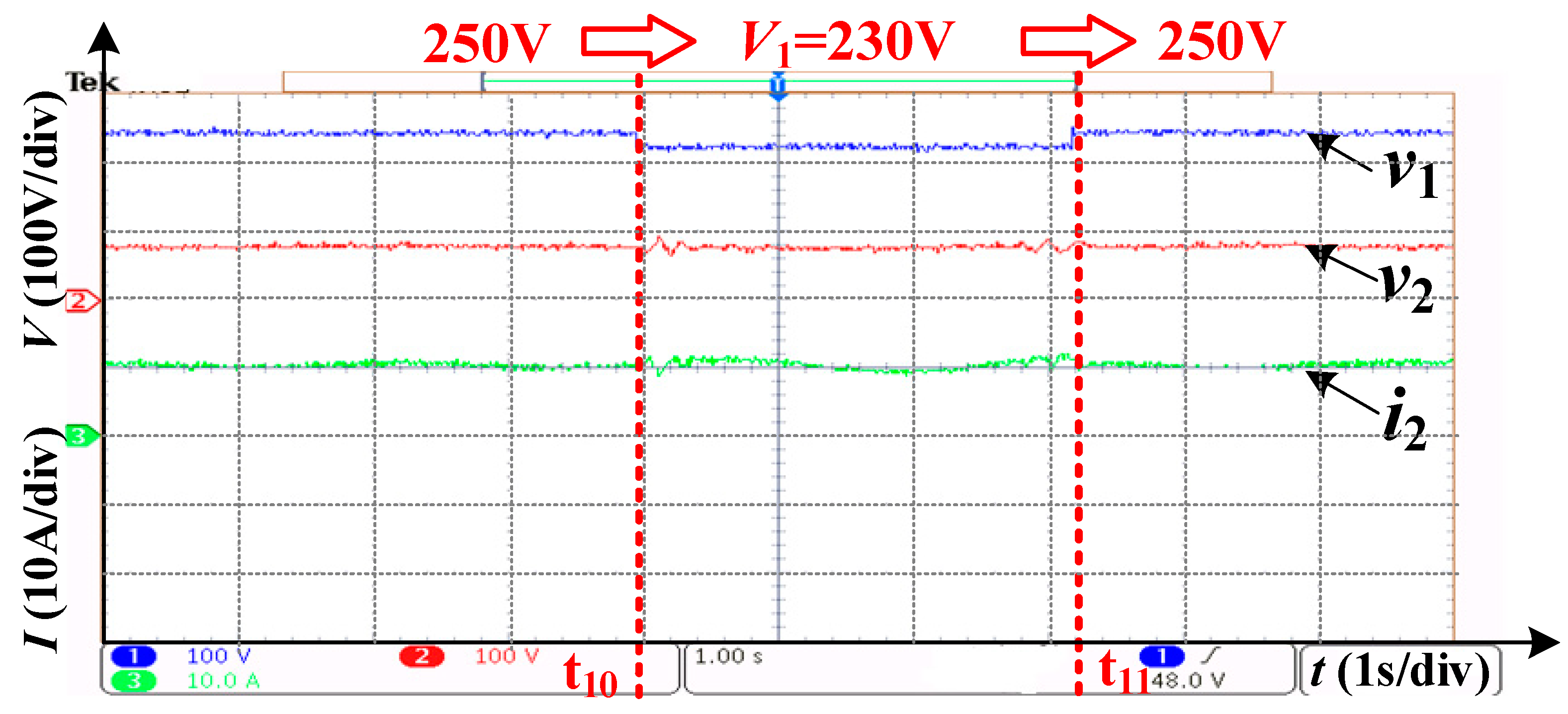
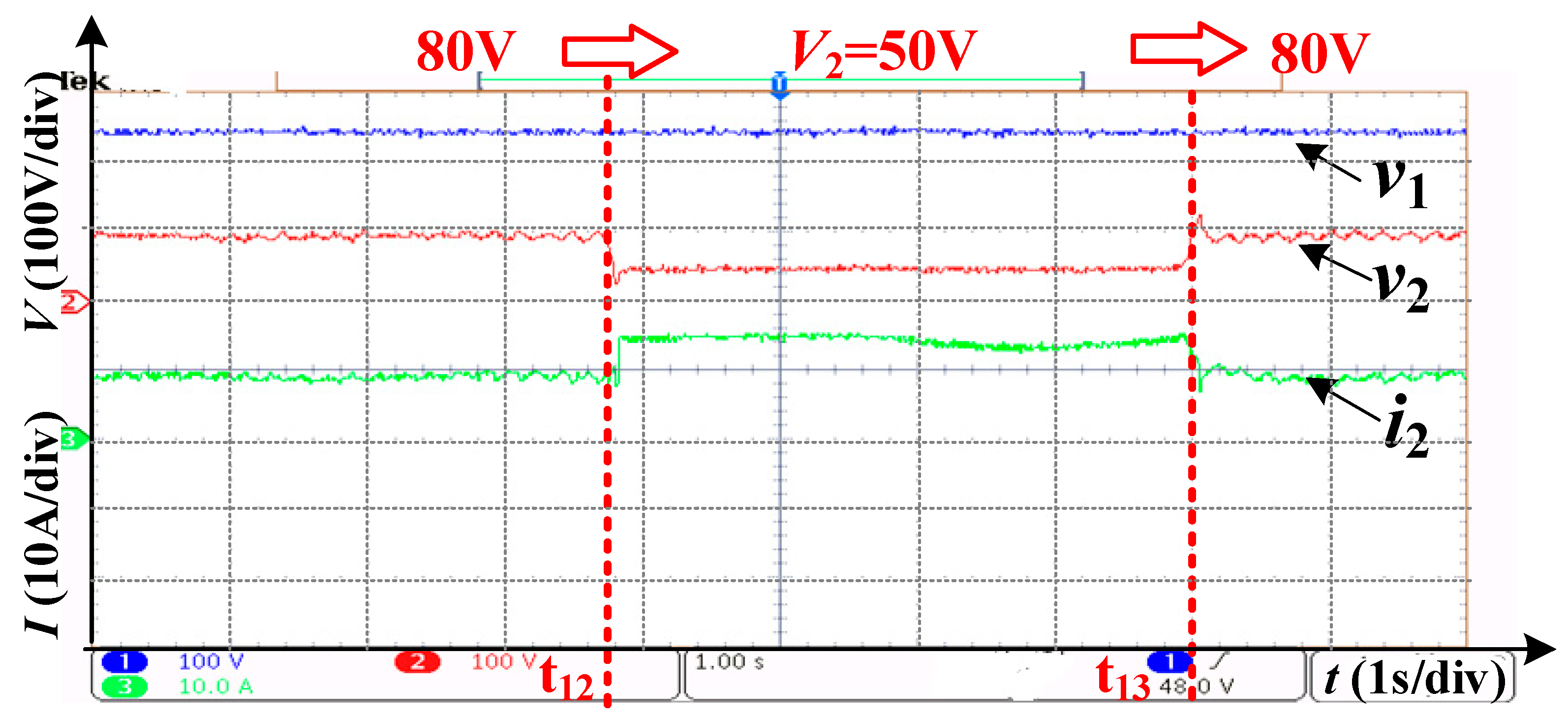
5.4. Voltage Reference Step Experiment
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Walter, J.; De Doncker, R. High-power galvanically isolated DC/DC converter topology for future automobiles. In Proceedings of the IEEE 34th Annual Conference on Power Electronics Specialist, Acapulco, Mexico, 15–19 June 2003; Volume 1, pp. 27–32. [Google Scholar]
- Kheraluwala, M.; De Doncker, R. Single phase unity power factor control for dual active bridge converter. In Proceedings of the IEEE Industry Applications Conference 28th IAS Annual Meeting, Toronto, ON, Canada, 2–8 October 1993; Volume 2, pp. 909–916. [Google Scholar]
- De Doncker, R.W.; Divan, D.M.; Kheraluwala, M.H. A three phase soft switched high power density DC/DC converter for high power applications. IEEE Trans. Indus. Appl. 1988, 27, 63–73. [Google Scholar] [CrossRef]
- Zhao, B.; Song, Q.; Liu, W.; Sun, Y. Overview of dual-active-bridge isolated bidirectional dc–dc converter for high-frequency-link power-conversion system. IEEE Trans. Power Electron. 2014, 29, 4091–4106. [Google Scholar] [CrossRef]
- Zhao, B.; Song, Q.; Liu, W.; Sun, Y. Dead-time effect of the high-frequency isolated bidirectional full-bridge dc–dc converter: Comprehensive theoretical analysis and experimental verification. IEEE Trans. Power Electron. 2014, 29, 1667–1680. [Google Scholar] [CrossRef]
- López-Rodríguez, K.; Escobar-Mejía, A.; Piedrahita-Echavarria, E.Y.; Gil-González, W. Passivity-Based Current Control of a Du-al-Active Bridge to Improve the Dynamic Response of a Solid-State Transformer During Power and Voltage Variations. In Proceedings of the IEEE 11th International Symposium on Power Electronics for Distributed Generation Systems (PEDG), Dubrovnik, Croatia, 28 September–1 October 2020; pp. 230–235. [Google Scholar]
- Cupelli, M.; Zhu, L.; Monti, A. Why ideal constant power loads are not the worst case condition from a control stand-point. IEEE Trans. Smart Grid 2015, 6, 2596–2606. [Google Scholar] [CrossRef]
- Emadi, A.; Khaligh, A.; Rivetta, C.H.; Williamson, G.A. Constant power loads and negative impedance instability in automotive systems: Definition modelling stability and control of power electronic converters and motor drives. IEEE Trans. Veh. Technol. 2006, 55, 1112–1125. [Google Scholar] [CrossRef]
- Martinez-Lopez, M.; Moreno-Valenzuela, J.; He, W. A robust nonlinear PI-type controller for the DC–DC buck–boost power converter. ISA Trans. 2022; in press. [Google Scholar] [CrossRef]
- Bobtsov, A.; Ortega, R.; Nikolaev, N.; He, W. A globally stable practically implementable PI passivity-based controller for switched power converters. arXiv 2020, arXiv:2005.01671. [Google Scholar] [CrossRef]
- Ai, X.; Zuo, D.; Zhang, Y. Modeling and Simulation of Dual-Active-Bridge Based on PI Control. J. Phys. Conf. Ser. 2022, 2221, 012007. [Google Scholar] [CrossRef]
- Qin, H.; Kimball, J.W. Generalized Average Modeling of Dual Active Bridge DC–DC Converter. IEEE Trans. Power Electron. 2011, 27, 2078–2084. [Google Scholar] [CrossRef]
- Li, H.; Peng, F.Z.; Lawler, J.S. A natural zvs medium-power bidirectional dc-dc converter with minimum number of devices. IEEE Trans. Ind. Appl. 2003, 39, 525–535. [Google Scholar]
- Krismer, F.; Kolar, J.W. Closed form solution for minimum conduction loss modulation of dab converters. IEEE Trans. Power Electron. 2011, 27, 174–188. [Google Scholar] [CrossRef]
- Krismer, F.; Kolar, J.W. Accurate small-signal model for the digital control of an automotive bidirectional dual active bridge. IEEE Trans. Power Electron. 2009, 24, 2756–2768. [Google Scholar] [CrossRef]
- Cardozo DD, M.; Balda, J.C.; Trowler, D.; Mantooth, H.A. Novel nonlinear control of dual active bridge using simplified converter model. In Proceedings of the 25th IEEE Annual Applied Power Electronics Conference and Exposition (APEC), Palm Springs, CA, USA, 21–25 February 2010; p. 7. [Google Scholar]
- Phattanasak, M.; Gavagsaz-Ghoachani, R.; Martin, J.P.; Pierfederici, S.; Davat, B. Flatness based control of an isolated three-port bidirectional dc-dc converter for a fuel cell hybrid source. In Proceedings of the IEEE Energy Conversion Congress and Exposition (ECCE), Phoenix, AZ, USA, 17–22 September 2011; pp. 977–984. [Google Scholar]
- Phattanasak, M.; Gavagsaz-Ghoachani, R.; Martin, J.-P.; Nahid-Mobarakeh, B.; Pierfederici, S.; Davat, B. Comparison of two nonlinear control strategies for a hybrid source system using an isolated three-port bidirectional DC-DC converter. In Proceedings of the 2011 IEEE Vehicle Power and Propulsion Conference, Chicago, IL, USA, 6–9 September 2011; pp. 1–6. [Google Scholar]
- Zhang, H.; Li, Y.; Li, Z.; Zhao, C.; Gao, F.; Hu, Y.; Luo, L.; Luan, K.; Wang, P. Model predictive control of input-series output-parallel dual active bridge converters based DC transformer. IET Power Electron. 2020, 13, 1144–1152. [Google Scholar] [CrossRef]
- Xiao, Z.; Lei, W.; Gao, G.; Cui, Y.; Kang, Q.; Wang, M. Transient Current Constraint of DAB Converter Based on Model Predictive Control. In Proceedings of the 2020 IEEE 9th International Power Electronics and Motion Control Conference (IPEMC2020-ECCE Asia), Nanjing, China, 29 November–2 December 2020; pp. 203–207. [Google Scholar]
- Jeung, Y.-C.; Lee, D.-C. Voltage and current regulations of bidirectional isolated dual-active-bridge DC–DC converters based on a double-integral sliding mode control. IEEE Trans. Power Electron. 2019, 34, 6937–6946. [Google Scholar] [CrossRef]
- Li, K.; Yang, Y.; Tan, S.-C.; Hui, R.S.-Y. Sliding-Mode-Based Direct Power Control of Dual-Active-Bridge DC-DC Converters. In Proceedings of the 2019 IEEE Applied Power Electronics Conference and Exposition (APEC), Anaheim, CA, USA, 17–21 March 2019; pp. 188–192. [Google Scholar]
- Song, W.; Hou, N.; Wu, M. Virtual Direct Power Control Scheme of Dual Active Bridge DC–DC Converters for Fast Dynamic Response. IEEE Trans. Power Electron. 2018, 33, 1750–1759. [Google Scholar] [CrossRef]
- Xu, Q.; Vafamand, N.; Chen, L.; Dragicevic, T.; Xie, L.; Blaabjerg, F. Review on Advanced Control Technologies for Bidirectional DC/DC Converters in DC Microgrids. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 9, 1205–1221. [Google Scholar] [CrossRef]
- Ortega, R.; van der Schaft, A.; Maschke, B.; Escobar, G. Interconnection and damping assignment passivity-based control of port-controlled Hamiltonian systems. Automatica 2002, 38, 585–596. [Google Scholar] [CrossRef]
- Li, J.; Lv, X.; Zhao, B.; Zhang, Y.; Zhang, Q.; Wang, J. Research on Passivity Based Control Strategy of Power Conversion System used in the Ener-gy Storage System. IET Power Electron. 2019, 12, 392–399. [Google Scholar] [CrossRef]
- Li, J.; Wang, M.; Zhao, Y.; Wang, J.; Yang, D.; Lv, X. Passivity-based control of the hybrid rectifier for medium and high-power application. IET Power Electron. 2019, 12, 4070–4078. [Google Scholar] [CrossRef]
- Yuanpeng FE, N.G.; Jiuhe WA, N.G.; Jianguo, L.I. Control strategy of Vienna rectifier with LCL filter under weak grid conditions. Power Gener. Technol. 2019, 40, 286–293. [Google Scholar]
- Biel, D.; Scherpen, J.M.A. Passivity-based control of active and reactive power in single-phase PV inverters. In Proceedings of the 2017 IEEE 26th International Symposium on Industrial Electronics (ISIE), Edinburgh, UK, 19–21 June 2017. [Google Scholar]
- Liu, G.; Wang, W.; Wang, W.; Zhu, K. Power Feedforward Method for Passivity-based Grid-connected PV Inverter in Weak Grids. In Proceedings of the 2018 IEEE 4th Southern Power Electronics Conference (SPEC), Singapore, 10–13 December 2018; pp. 1–6. [Google Scholar]
- Gui, Y.; Kim, W.; Chung, C.C. Passivity-Based Control With Nonlinear Damping for Type 2 STATCOM Systems. IEEE Trans. Power Syst. 2016, 31, 2824–2833. [Google Scholar] [CrossRef]
- Jiang, Y.; Qin, C.; Xing, X.; Li, X.; Zhang, C. A Hybrid Passivity-Based Control Strategy for Three-Level T-Type Inverter in LVRT Operation. IEEE J. Emerg. Sel. Top. Power Electron. 2019, 8, 4009–4024. [Google Scholar] [CrossRef]
- Zhao, J.; Wu, W.; Gao, N.; Wang, H.; Chung, H.; Blaabjerg, F. Combining Passivity-Based Control with Active Damping to Improve Stability of LCL Filtered Grid-Connected Voltage Source Inverter. In Proceedings of the 2018 IEEE International Power Electronics and Application Conference and Exposition (PEAC), Shenzhen, China, 4–7 November 2018; pp. 1–6. [Google Scholar]
- Meshram, R.V.; Bhagwat, M.; Khade, S.; Wagh, S.R.; Stankovic, A.M.; Singh, N.M. Port-Controlled Phasor Hamiltonian Modeling and IDAPBC Control of Solid-State Transformer. IEEE Trans. Control Syst. Technol. 2017, 27, 161–174. [Google Scholar] [CrossRef]
- Cupelli, M.; Gurumurthy, S.K.; Bhanderi, S.K.; Yang, Z.; Joebges, P.; Monti, A.; De Doncker, R.W. Port Controlled Hamiltonian Modeling and IDA-PBC Control of Dual Active Bridge Converters for DC Microgrids. IEEE Trans. Ind. Electron. 2019, 66, 9065–9075. [Google Scholar] [CrossRef]
- Cupelli, M.; Bhanderi, S.K.; Gurumurthy, S.K.; Monti, A. Port—Hamiltonian Modelling and Control of Single Phase DAB Based MVDC Shipboard Power System. In Proceedings of the IECON 2018—44th Annual Conference of the IEEE Industrial Electronics Society, Washington, DC, USA, 21–23 October 2018; pp. 3437–3444. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value | |
|---|---|---|
| 1 | DC voltage v1 (V) | 750 |
| 2 | capacitance C1 (µF) | 2200 |
| 3 | resistance R1 (Ω) | 100 × 103 |
| 4 | voltage v2 (V) | 375 |
| 5 | capacitance C2 (µF) | 2200 |
| 6 | resistance R2 (Ω) | 100 × 103 |
| 7 | inductance L1 (µH) | 200 |
| 8 | HF transformer’s turn ratio | 750:375 |
| 9 | DAB switching frequency (kHz) | 10 |
| 10 | damping coefficient g22 | 3.2 |
| 11 | proportional coefficient kp | 0.12 |
| 12 | integral coefficient ki | 0.25 |
| Parameters | Value | |
|---|---|---|
| 1 | DC voltage v1 (V) | 300 |
| 2 | capacitance C1 (µF) | 1360 |
| 3 | resistance R1 (Ω) | 200 × 103 |
| 4 | voltage v2 (V) | 150 |
| 5 | capacitance C2 (µF) | 5440 |
| 6 | resistance R2 (Ω) | 100 × 103 |
| 7 | inductance L1 (µH) | 156 |
| 8 | HF transformer’s turn ratio | 300:150 |
| 9 | DAB switching frequency (kHz) | 20 |
| 10 | damping coefficient g22 | 13 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, J.; Zhao, Y.; Wu, X.; Zhang, Y.; Wang, J. Passivity-Based Control of Dual Active Bridge Converter in Constant Power Load Condition. Energies 2022, 15, 6685. https://doi.org/10.3390/en15186685
Li J, Zhao Y, Wu X, Zhang Y, Wang J. Passivity-Based Control of Dual Active Bridge Converter in Constant Power Load Condition. Energies. 2022; 15(18):6685. https://doi.org/10.3390/en15186685
Chicago/Turabian StyleLi, Jianguo, Yuming Zhao, Xuezhi Wu, Yajing Zhang, and Jiuhe Wang. 2022. "Passivity-Based Control of Dual Active Bridge Converter in Constant Power Load Condition" Energies 15, no. 18: 6685. https://doi.org/10.3390/en15186685