
Simple Mathematical and Simulink Model of Stepper Motor

 , , , and
, , , and 
Abstract
:1. Introduction
2. Mathematical Model of Motor
2.1. Inductance and Flux Linkage
2.2. Voltage Equations and Circuit Model
2.3. Electromagnetic Torque
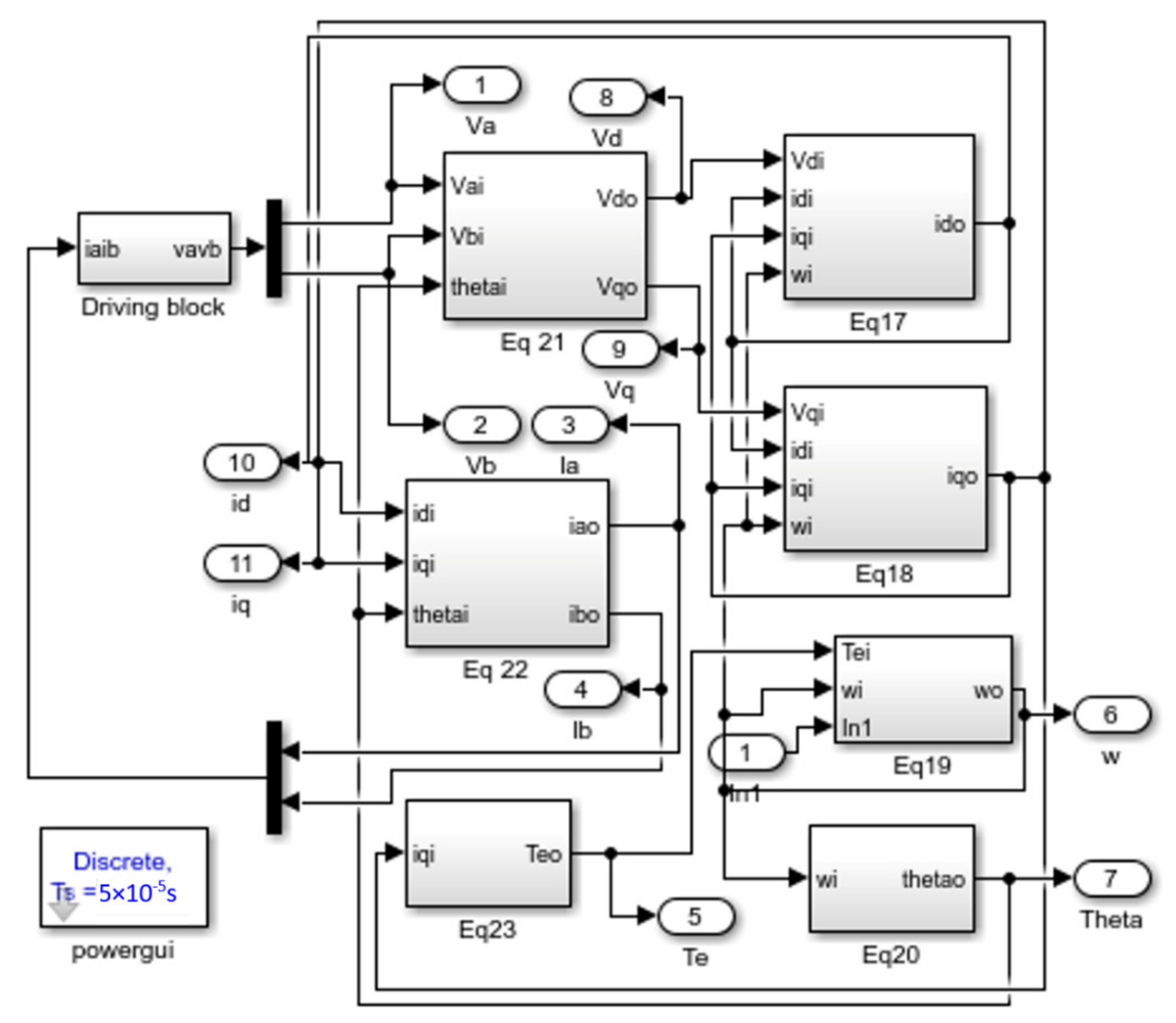
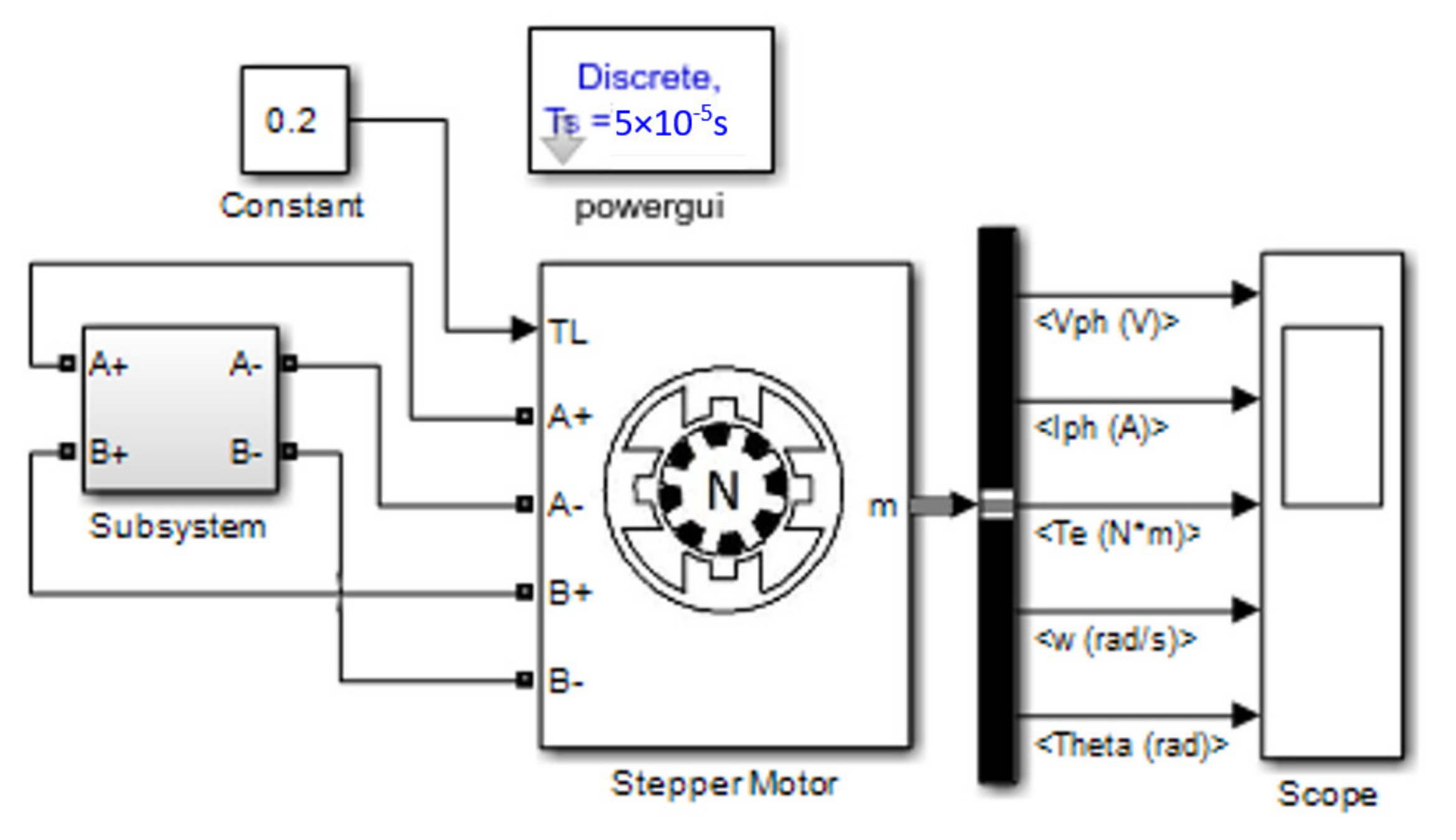
3. Simulink Dynamic Model
4. Results and Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| B | total friction coefficient |
| Em | maximum open-circuit winding voltage |
| magnetomotive force | |
| J | total inertia |
| inductances of phase winding of steeper motor | |
| , | self-inductances of phase α and β |
| Ns | number of teeth per stator pole |
| electrical input power of stepper motor | |
| electromagnetic power of stepper motor | |
| P1(x) to P5(x) | permeance layers as function of length x |
| Pt(x) | total permeance function |
| the n harmonic of permeanc function | |
| the first harmonic of permeanc function | |
| , , , | permeance for phases of stepper motor |
| average of permeance function | |
| resistance of phase winding of steeper motor | |
| electromagnetic torque of stepper motor | |
| TL | load torque |
| , | voltages of stepper motor in dq axes |
| , | voltages for phase α and phase β |
| , | currents of stepper motor in dq axes |
| , | currents for phase α and phase β |
| m | phase number of motor |
| nm | constant speed of stepper motor at open-circuit winding voltage |
| p | number of pole pairs |
| α, β, , | phases of stepper motor |
| θ(t) | displacement angle |
| permeability of free space | |
| ψm | maximum flux linkage |
| , | mutual flux linkages on phases α and β |
| rotational speed of stepper motor () |
References
- Manasrah, A.; Alkhalil, S. A 2-DoF Skin Stretch Display on Palm: Effect of Stimulation Shape, Speed and Intensity. In Proceedings of the International Conference on Human Haptic Sensing and Touch Enabled Computer Applications, EuroHaptics 2020, Leiden, The Netherlands, 6–9 September 2020; pp. 12–24. [Google Scholar]
- Hojati, M.; Baktash, A. Design and fabrication of a new hybrid stepper motor with significant improvements in torque density. Eng. Sci. Technol. Int. J. 2021, 24, 1116–1122. [Google Scholar] [CrossRef]
- Hamid, N.A.; Abdelrahim, A.; Ahmed, M.M. Developing the Hybrid Stepper Motor Model for Tracking Purpose Using New Methodology. In Proceedings of the International Workshop on Materials, Chemistry and Engineering—IWMCE, Xiamen, China, 16–17 June 2018; pp. 174–182. [Google Scholar] [CrossRef]
- Lai, C.-K.; Lin, B.-W.; Lai, H.-Y.; Chen, G.-Y. FPGA-Based Hybrid Stepper Motor Drive System Design by Variable Structure Control. Actuators 2021, 10, 113. [Google Scholar] [CrossRef]
- Ionică, I.; Modreanu, M.; Morega, A.; Boboc, C. Design and Modeling of a Hybrid Stepper Motor. In Proceedings of the 2017 10th International Symposium on Advanced Topics in Electrical Engineering (ATEE), Bucharest, Romania, 23–25 March 2017. [Google Scholar]
- Mihalache, G.; Zbant, A.; Livint, G. Open-Loop Control of Hybrid Stepper Motor with Two Phases Using Voltage to Fre-quency Converter. In Proceedings of the 2013 8th International Symposium on Advanced Topics in Electrical Engineering (ATEE), Bucharest, Romania, 23–25 March 2013. [Google Scholar]
- Kuert, C.; Jufer, M.; Perriard, Y. New method for dynamic modeling of hybrid stepping motors. In Proceedings of the Conference Record of the 2002 IEEE Industry Applications Conference. 37th IAS Annual Meeting (Cat. No.02CH37344), Pittsburgh, PA, USA, 13–18 October 2002. [Google Scholar]
- Chai, H. A mathematical model for single-stack step motors. IEEE Trans. Power Appar. Syst. 1975, 94, 1508–1517. [Google Scholar] [CrossRef]
- Rao, E.S.; Prasad, P. Dynamic Performance Analysis of Permanent Magnet Hybrid Stepper Motor by Transfer Function Model for Different Design Topologies. Int. J. Electr. Comput. Eng. 2011, 2, 191–196. [Google Scholar] [CrossRef]
- Matsui, N.; Nakamura, M.; Kosaka, T. Instantaneous torque analysis of hybrid stepping motor. IEEE Trans. Ind. Appl. 1996, 32, 1176–1182. [Google Scholar] [CrossRef]
- Mizutami, K.; Hayashi, S.; Matsui, N. Modeling and control of hybrid stepping motors. In Proceedings of the Conference Record of the 1993 IEEE Industry Applications Conference Twenty-Eighth IAS Annual Meeting, Toronto, ON, Canada, 2–8 October 1993. [Google Scholar]
- Bendjedia, M.; Ait-Amirat, Y.; Walther, B.; Berthon, A. Position Control of a Sensorless Stepper Motor. IEEE Trans. Power Electron. 2011, 27, 578–587. [Google Scholar] [CrossRef]
- Le-Huy, H.; Brunelle, P.; Sybille, G. Design and implementation of a versatile stepper motor model for simulinks SimPowerSystems. In Proceedings of the IEEE International Symposium on Industrial Electronics (ISIE), Cairns, QLD, Australia, 13–15 June 2008; pp. 437–442. [Google Scholar] [CrossRef]
- Samokhvalov, D.; Stoliarov, S.; Kekkonen, A. The hybrid stepper motor modeling in Simulink. In Proceedings of the 2015 IEEE NW Russia Young Researchers in Electrical and Electronic Engineering Conference (EIConRusNW), St. Petersburg, Russia, 2–4 February 2015. [Google Scholar]
- Morar, A. The Modelling and Simulation of Bipolar Hybrid Stepping Motor by Matlab/Simulink. Procedia Technol. 2015, 19, 576–583. [Google Scholar] [CrossRef]
- Lin, H.; Anatolii, S.; Naung, Y.; Zaw, K.; Khaing, Z. Modelling and control of an open-loop stepper motor in Matlab/Simulink. In Proceedings of the 2017 IEEE Conference of Russian Young Researchers in Electrical and Electronic Engineering (EIConRus), Moscow, Russia, 1–3 February 2017. [Google Scholar]
- Iqteit, N.A.; Daud, A.K. A new model of self-excited induction generator to feed a single phase load with an application in lighting animal farm. Int. J. Power Energy Convers. 2019, 10, 32. [Google Scholar] [CrossRef]
- Ong, C. Dynamic Simulation of Electric Machinery; Prentice Hall PTR: Hoboken, NJ, USA, 1998. [Google Scholar]
- Ullah, N.; Khan, F.; Ullah, W.; Basit, A.; Umair, M.; Khattak, Z. Analytical Modelling of Open-Circuit Flux Linkage, Cogging Torque and Electromagnetic Torque for Design of Switched Flux Permanent Magnet Machine. J. Magn. 2018, 23, 253–266. [Google Scholar] [CrossRef]
- Sheth, N.; Rajagopal, K. Calculation of the flux-linkage characteristics of a switched reluctance motor by flux tube method. IEEE Trans. Magn. 2005, 41, 4069–4071. [Google Scholar] [CrossRef]
- Agha, A.; Attar, H.; Luhach, A.K. Optimized Economic Loading of Distribution Transformers Using Minimum Energy Loss Computing. Math. Probl. Eng. 2021, 9, 2021. [Google Scholar] [CrossRef]
- Morimoto, S.; Takeda, Y.; Hirasa, T. Current phase control methods for permanent magnet synchronous motors. IEEE Trans. Power Electron. 1990, 5, 133–139. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Equation | No. |
|---|---|
| (17) | |
| (18) | |
| (19) | |
| (20) | |
| (21) | |
| (22) | |
| (23) | |
| Number of Phases | 2 |
|---|---|
| Winding Inductance (Ls) | 1 mH |
| Winding Resistance (R) | 1.2 Ω |
| Step Angle | 30° |
| The maximum flux linkage (ψm) | 0.04 Vs |
| Loading Torque (TL) | 0.2 Nm |
| Total inertia (J) | 2 × 10−5 kg·m2 |
| Total friction (B) | 1 × 10−3 kg·m/s |
| θ0 and ω0 | 0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Iqteit, N.A.; Yahya, K.; Makahleh, F.M.; Attar, H.; Amer, A.; Solyman, A.A.A.; Qudaimat, A.; Tamizi, K. Simple Mathematical and Simulink Model of Stepper Motor. Energies 2022, 15, 6159. https://doi.org/10.3390/en15176159
Iqteit NA, Yahya K, Makahleh FM, Attar H, Amer A, Solyman AAA, Qudaimat A, Tamizi K. Simple Mathematical and Simulink Model of Stepper Motor. Energies. 2022; 15(17):6159. https://doi.org/10.3390/en15176159
Chicago/Turabian StyleIqteit, Nassim A., Khalid Yahya, Firas M. Makahleh, Hani Attar, Ayman Amer, Ahmed Amin Ahmed Solyman, Ahmad Qudaimat, and Khaled Tamizi. 2022. "Simple Mathematical and Simulink Model of Stepper Motor" Energies 15, no. 17: 6159. https://doi.org/10.3390/en15176159