
Research on the Characteristics of the Solid–Liquid Two-Phase Flow Field of a Submersible Mixer Based on CFD-DEM

Abstract
:1. Introduction
2. Calculation Model
2.1. Physical Model
2.2. Mathematical Model
2.2.1. Continuous Phase Mathematical Model
2.2.2. DEM Mathematical Model
3. Numerical Calculation
3.1. Meshing
3.2. Boundary Conditions and Initial Conditions
3.3. Other Settings
4. Result and Discussion
4.1. Distribution of Pool Flow Field
4.1.1. Distribution of Velocity and Turbulent Kinetic Energy Distribution
4.1.2. Uniformity of Velocity Distribution
4.1.3. Distribution of Dead Zone Distribution
4.2. Motion Analysis of Particles
4.2.1. Motion Process of Particles
4.2.2. Axial Distribution of Particles
4.2.3. Horizontal Distribution of Particles
4.2.4. Lateral Distribution of Particles
4.2.5. Collision of Particles
5. Conclusions
- (1)
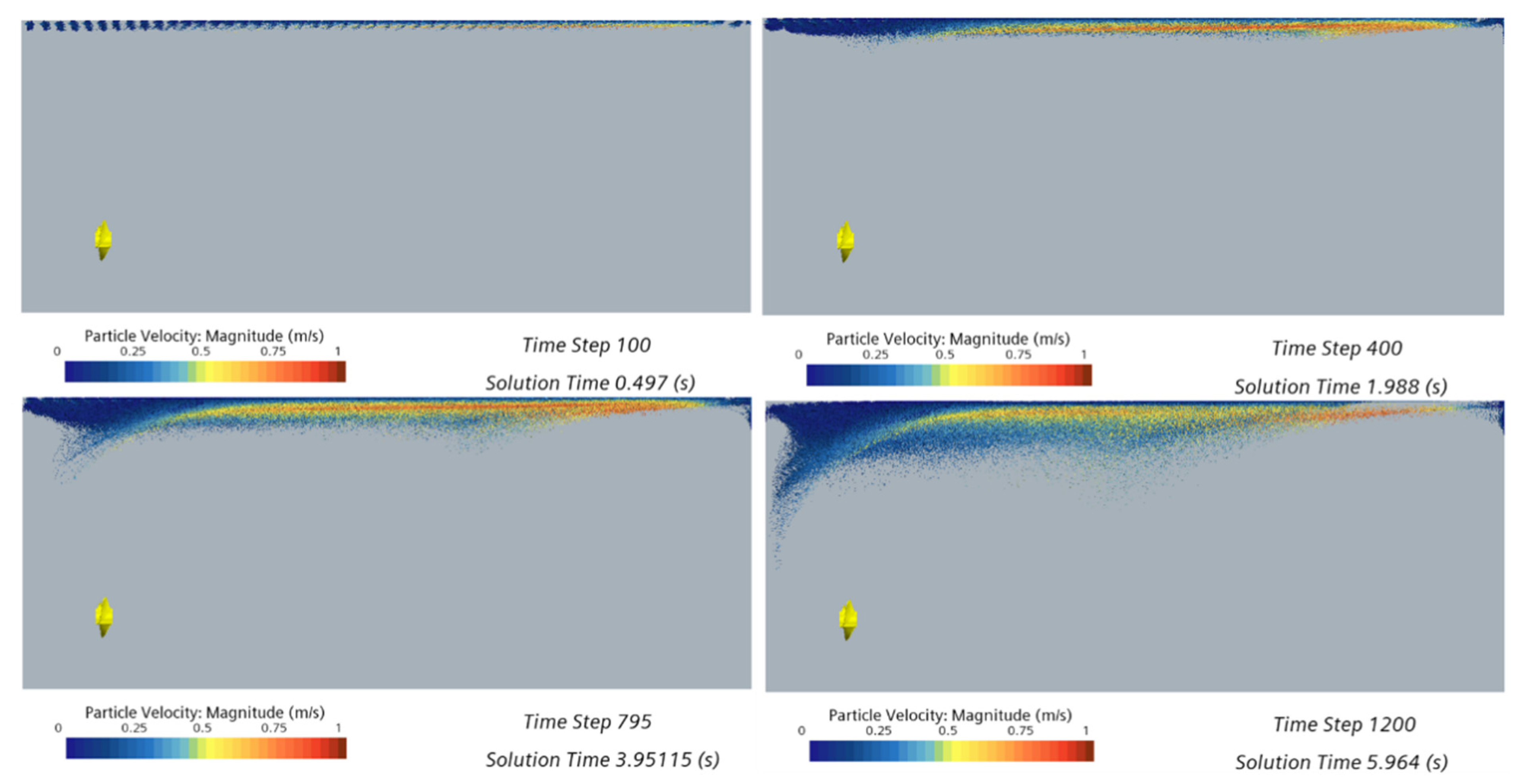
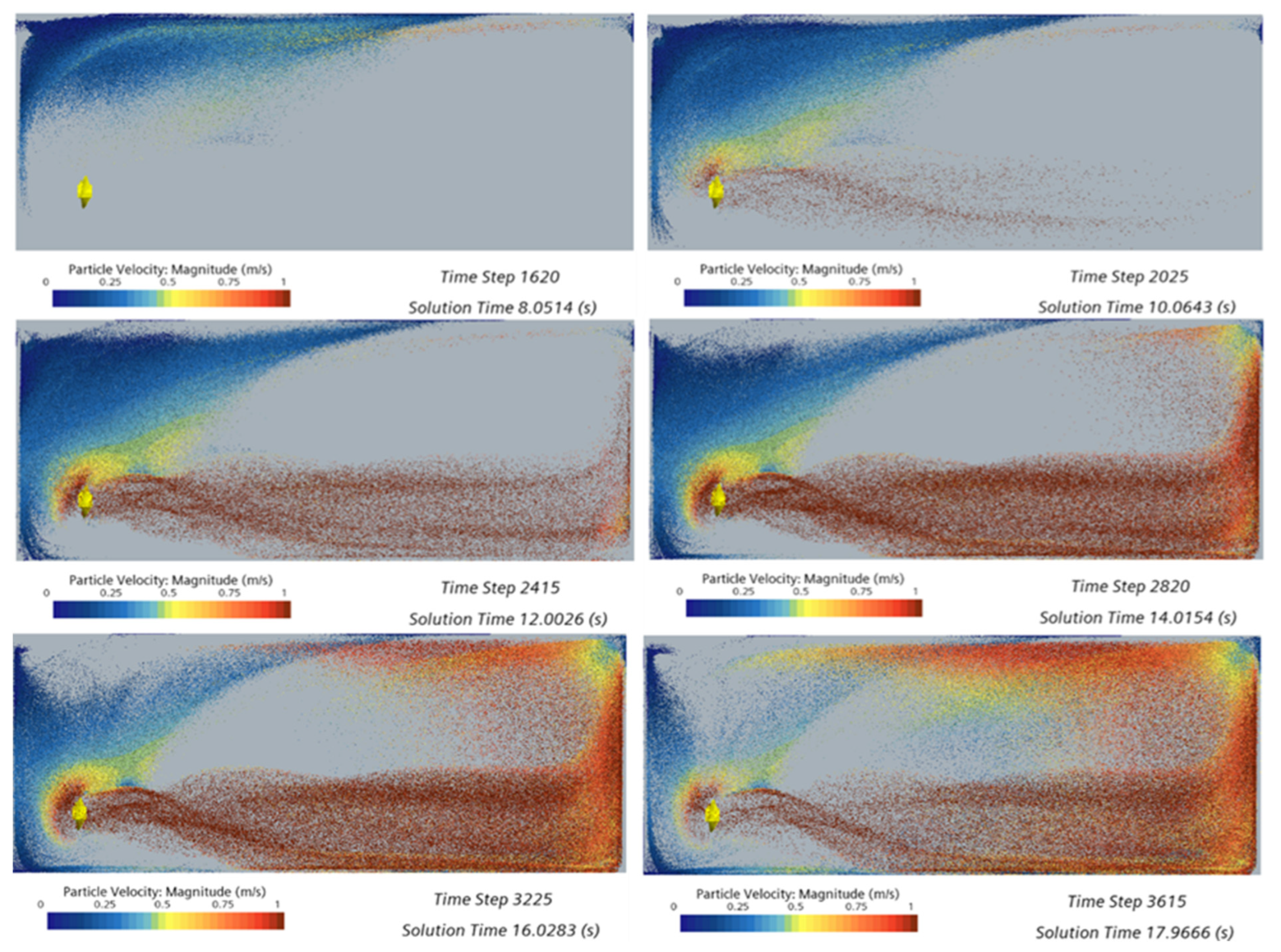
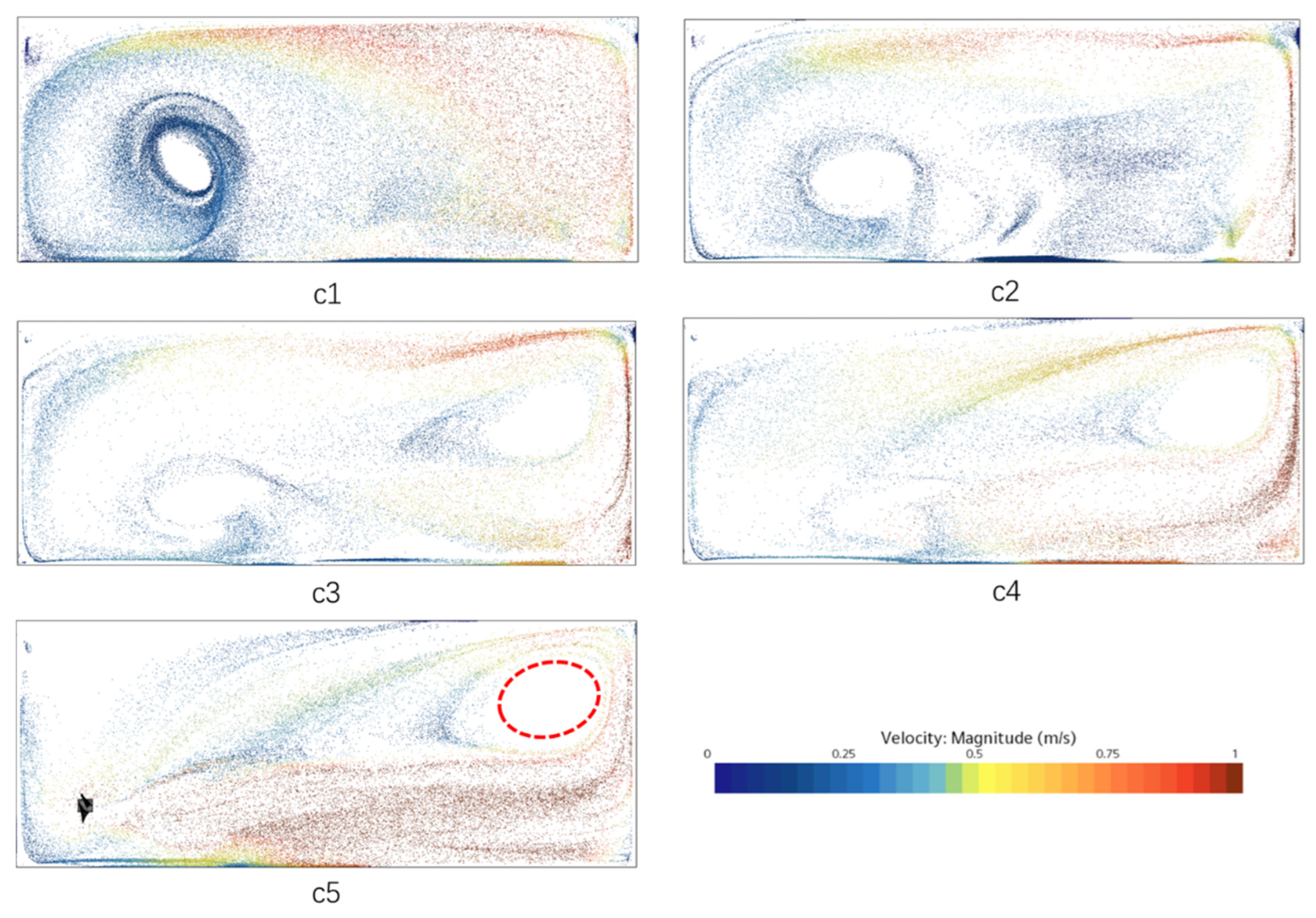
- The movement process of activated sludge particles in the tank can be roughly divided into three stages: horizontal development stage, absorption-injection stage, and reflux-mixing stage;
- (2)
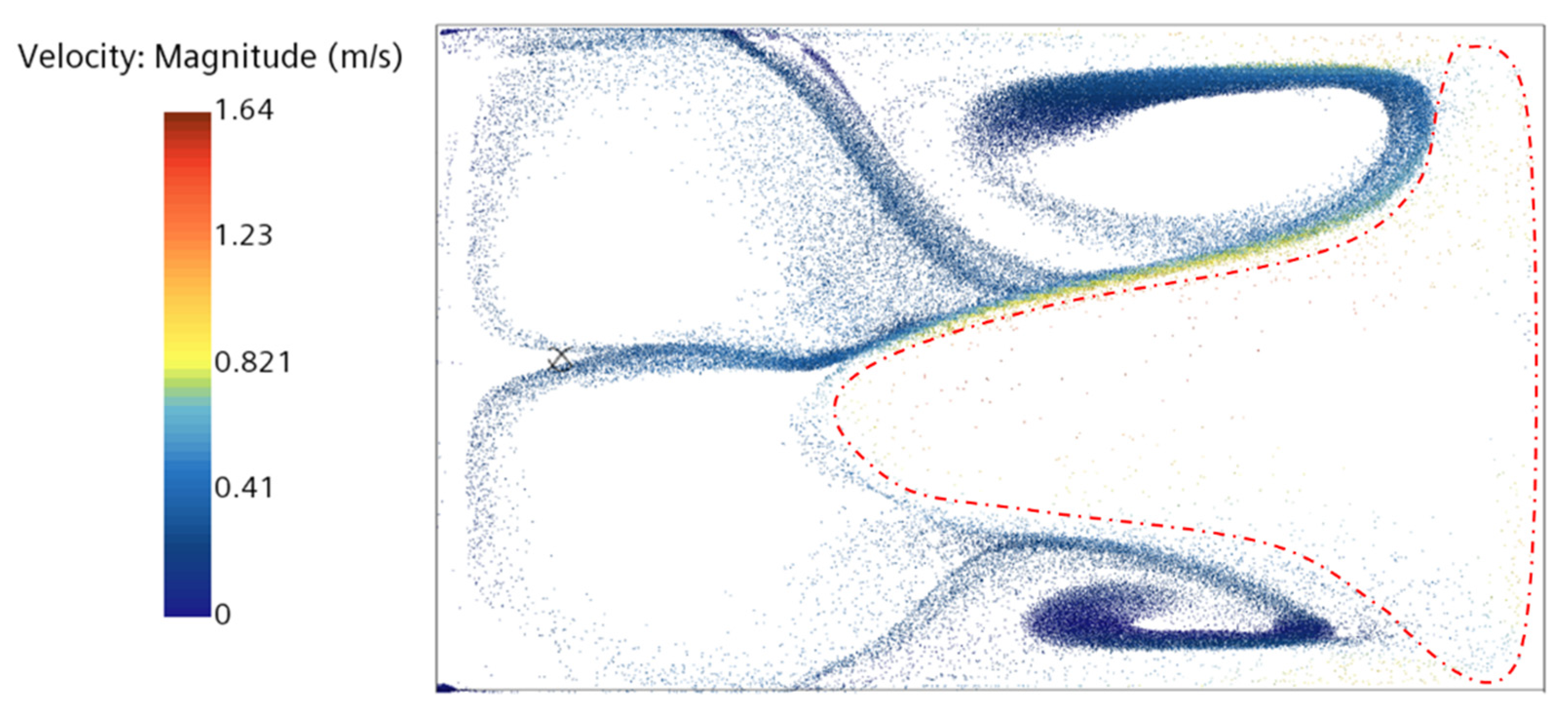
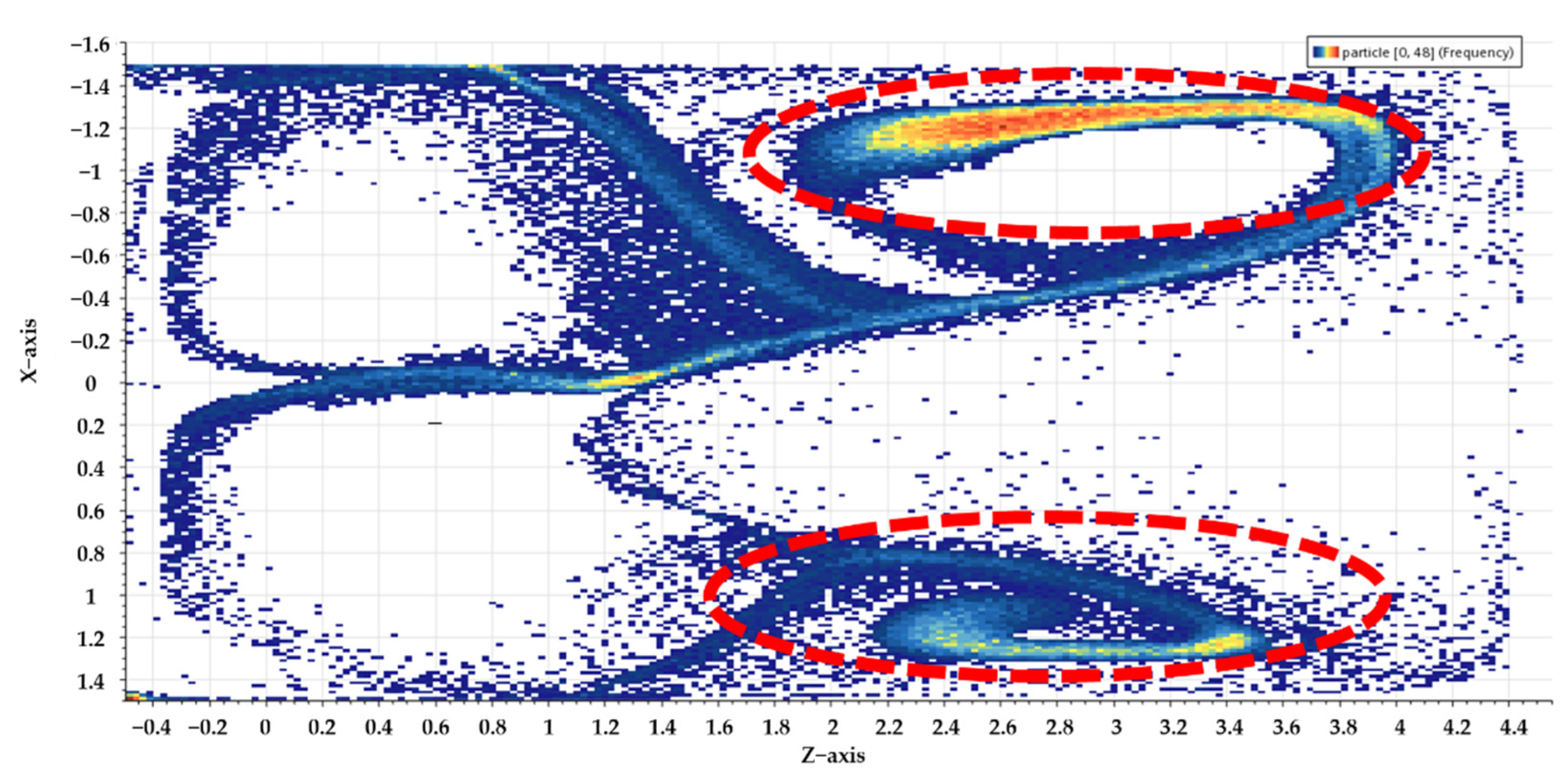
- Particle accumulation occurs mainly in the dead zone of the flow field. There are two forms of particle aggregation: one is in the form of vortex, particles still have certain angular velocity; the other aggregation mainly occurs in the dead zone position of the pool wall junction, where the velocity and angular velocity of particles are relatively low;
- (3)
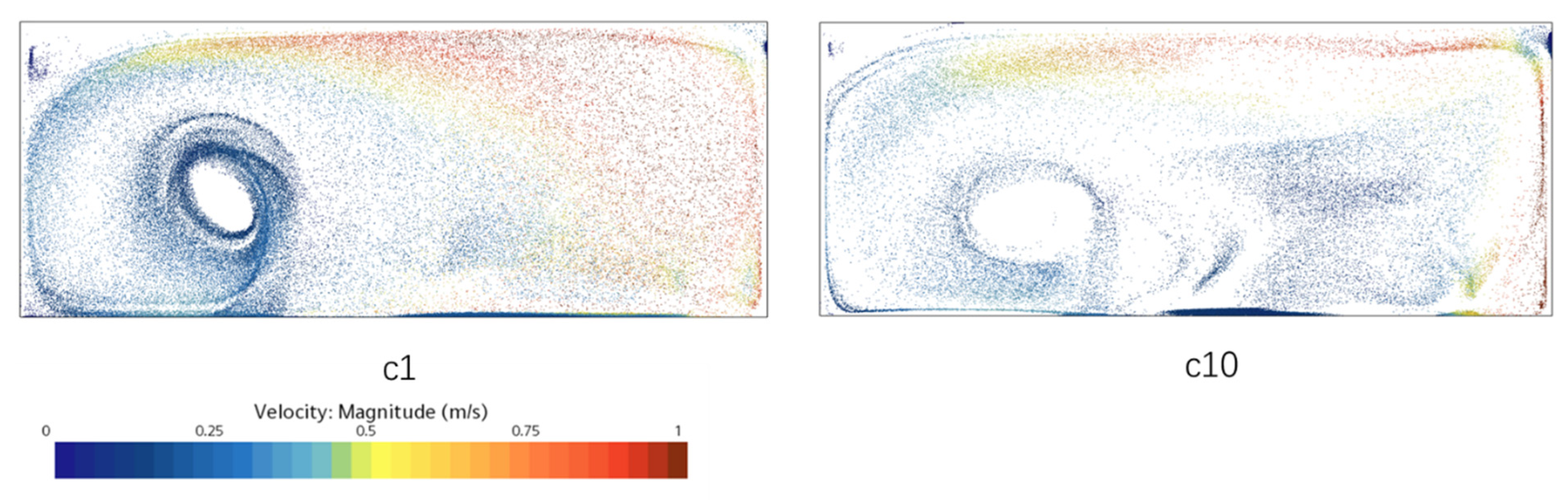
- The uniformity of particle distribution of the whole pool is relatively well, with the highest uniformity of distribution in the axial direction and the worst uniformity in the horizontal direction. The vortex generated near the bottom and walls of the pool is an essential factor leading to the aggregation of particles;
- (4)
- The collision of particles in the pool takes place mainly in the regions of particle aggregation, accounting for approximately 84% of the total number of particle collisions.
- (5)
- The coupled CFD-DEM-based method can simulate and study the solid–liquid two-phase flow of submersible mixers very well, and it can comprehensively analyze the motion and distribution of particles inside the pool. Based on this method, the optimization design of the solid–liquid two-phase flow field of the submersible mixer can be carried out more reasonably to achieve the effect of improving efficiency and saving energy.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Mackenziel, L.D.; David, A.C. Introduction to Environmental Engineering, 4th ed.; Tsinghua University Press: Beijing, China, 2007. [Google Scholar]
- Yan, J.H.; Huang, D.J.; Teng, G.R. Research on Rural Domestic Sewage Disposal of Biologic Disposal High Efficiency Blender. J. Anhui Agric. Sci. 2009, 37, 9606–9607. [Google Scholar]
- Xu, W.X.; Yuan, S.Q. Optimization Design of Submersible Mixer Based on a Simulation Study of Agitated and Engineering Application. China Rural. Water Hydropower 2011, 6, 32–35. [Google Scholar]
- Xu, S.; Tang, F.P.; Wang, W.S. Influence of Different Blade Gaps on Flow Field of Submersible Mixer. China Water Wastewater 2017, 33, 106–109. [Google Scholar]
- Ren, X.X.; Tang, F.P.; Xu, Y. Performance analysis of blade angle of submersible agitator. South-North Water Transf. Water Sci. Technol. 2021, 19, 805–813. [Google Scholar]
- Li, W.; Wang, L.; Shi, W.D.; Chang, H.; Wu, P. Numerical simulation and performance prediction of solid-liquid two-phase flow of alkaline pump based on full factor test. J. Drain. Irrig. Mach. Eng. 2021, 39, 865–870. [Google Scholar]
- Jin, J.H.; Zhang, H.W. A Numerical Simulation of Submersible Mixer in Three-dimensional Flow with Sewage-sludge Two-phase. China Rural. Water Hydropower 2014, 10, 159–162. [Google Scholar]
- Tian, F.; Shi, W.; Jiang, H.; Zhang, Q. A Study on Two-Phase Flow of Multiple Submersible Mixers Based on Rigid-Lid Assumption. Adv. Mech. Eng. 2014, 2014, 531234. [Google Scholar] [CrossRef]
- Cundall, P.A.; Strack, O.D.L. A Discrete Numerical Mode for Granular Assemblies. Géotechnique 1979, 29, 47–65. [Google Scholar] [CrossRef]
- Li, Y.L. Effect of Continuously Varying Curvature on Solid-Liquid Two-Phase Flow by CFD-DEM and its Application in Large Desulfurization Pump; Jiangsu University: Zhenjiang, China, 2015. [Google Scholar]
- Zhou, M.; Wang, S.; Kuang, S. CFD-DEM modelling of hydraulic conveying of solid particles in a vertical pipe. Powder Technol. 2019, 354, 893–905. [Google Scholar] [CrossRef]
- Xia, C.; Zhao, R.J.; Shi, W.D. Numerical Investigation of Particle Induced Erosion in a Mixed Pump by CFD-DEM Coupled Method. J. Eng. Thermophys. 2021, 42, 357–369. [Google Scholar]
- Zhao, L.J. Numerical Simulation for Stirred Mixing Based on CFD-DEM and Development of Integrated Simulation Platform; Zhejiang University of Technology: Hangzhou, China, 2021. [Google Scholar]
- Song, L.B.; Teng, S.; Cao, Q.; Kang, C.; Ding, K.J.; Li, C.J. Wear of large solid particles on the impeller of solid-liquid two-phase flow pump. J. Drain. Irrig. Mach. Eng. 2021, 39, 987–993. [Google Scholar]
- Schiller, V.L. Uber die Grundlegenden Berechnungen bei der Schwerkraftaufbereitung. Z. Vernes Dtsch. Inge 1933, 77, 318–321. [Google Scholar]
- Dinh, B. Experiments on the lift of a spinning sphere in a range of intermediate Reynolds numbers. Exp. Fluids 1998, 25, 16–22. [Google Scholar]
- Saffman, P.G. The Lift on a Small Sphere in a Slow Shear. J. Fluid Mech. 1965, 22, 385–400. [Google Scholar] [CrossRef] [Green Version]
- Chen, Y.F.; Yang, C.; Zhang, H. Influence and optimization of mixer’s arrangement of flow field of anoxic pool. J. Drain. Irrig. Mach. Eng. 2020, 38, 1045–1050. [Google Scholar]
- Xu, D.E.; Yang, C.X.; Cai, J.G.; Han, Y.; Ge, X.F. Numerical simulation of solid-liquid two-phase in tubular turbine. J. Drain. Irrig. Mach. Eng. 2021, 39, 910–916. [Google Scholar]
- Zhang, X.N.; Zhao, J.Y.; Wang, W.H. Influence of Submersible Mixer Installation Angle with the Mixing Effect. J. Beijing Inst. Civ. Eng. Archit. 2014, 30, 48–51. [Google Scholar]
- Weltens, H.; Bressler, H.; Terres, F. Optimisation of Catalytic Converter Gas Flow Distribution by CFD Prediction. In Proceedings of the International Congress & Exposition, Detroit, MI, USA, 1–5 March 1993. [Google Scholar]






























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Serial Number | Mesh Number | Torque [N·m] | Hydraulic Thrust [N] | Torque Deviation [%] | Hydraulic Thrust Deviation [%] |
|---|---|---|---|---|---|
| 1 | 320,438 | 99.8 | 2056.6 | 8.26 | 9.88 |
| 2 | 621,211 | 105.3 | 2209.3 | 3.21 | 3.19 |
| 3 | 1,542,649 | 108.3 | 2279.5 | 0.46 | 0.11 |
| 4 | 2,186,086 | 108.6 | 2280.4 | 0.18 | 0.07 |
| 5 | 4,030,726 | 108.9 | 2283.2 | 0.09 | 0.05 |
| Uniformity | Axial | Horizontal | Lateral | Pool |
|---|---|---|---|---|
| 0.91 | 0.81 | 0.86 | 0.86 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tian, F.; Zhang, E.; Yang, C.; Shi, W.; Chen, Y. Research on the Characteristics of the Solid–Liquid Two-Phase Flow Field of a Submersible Mixer Based on CFD-DEM. Energies 2022, 15, 6096. https://doi.org/10.3390/en15166096
Tian F, Zhang E, Yang C, Shi W, Chen Y. Research on the Characteristics of the Solid–Liquid Two-Phase Flow Field of a Submersible Mixer Based on CFD-DEM. Energies. 2022; 15(16):6096. https://doi.org/10.3390/en15166096
Chicago/Turabian StyleTian, Fei, Erfeng Zhang, Chen Yang, Weidong Shi, and Yonghua Chen. 2022. "Research on the Characteristics of the Solid–Liquid Two-Phase Flow Field of a Submersible Mixer Based on CFD-DEM" Energies 15, no. 16: 6096. https://doi.org/10.3390/en15166096