
Coupling Effects on Distributed Multi-Propeller Channel Wing at Low Speed Condition


Abstract
:1. Introduction
2. Numerical Methods Validation
2.1. Flow Solver
2.2. Results
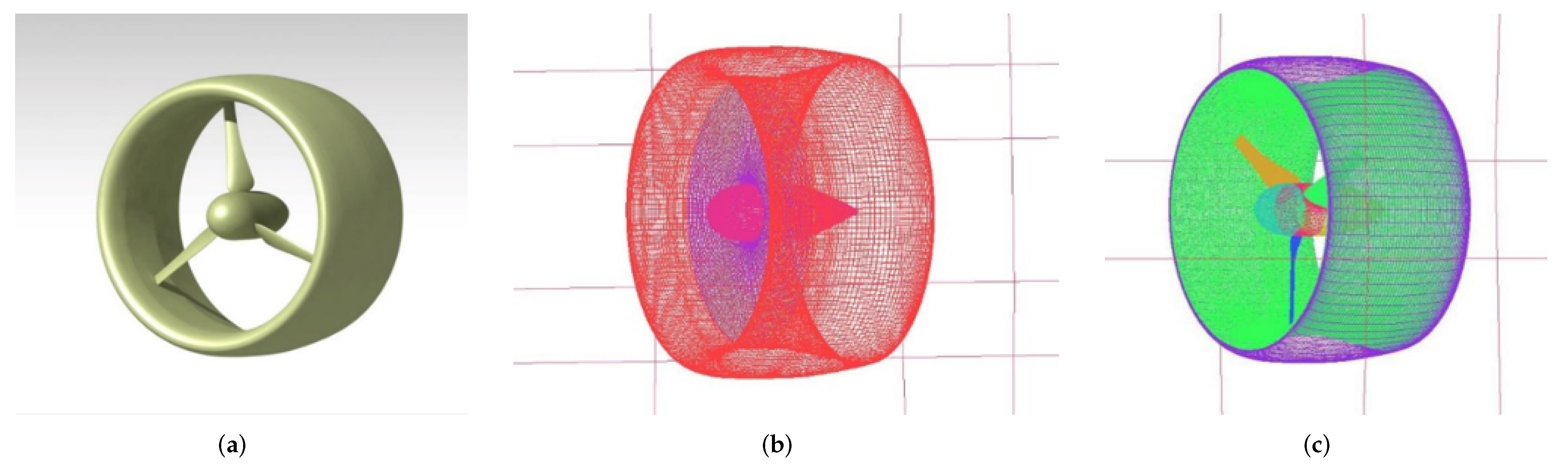
3. The Single-Propeller Channel Wing Integration
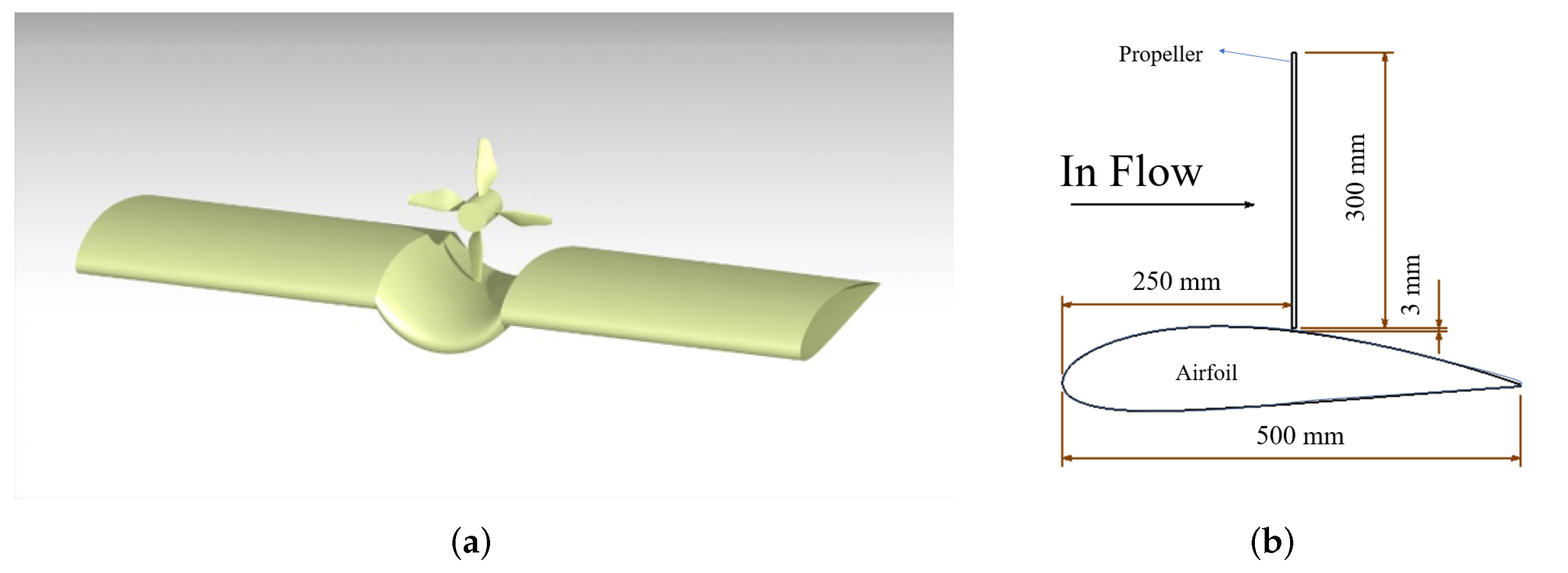
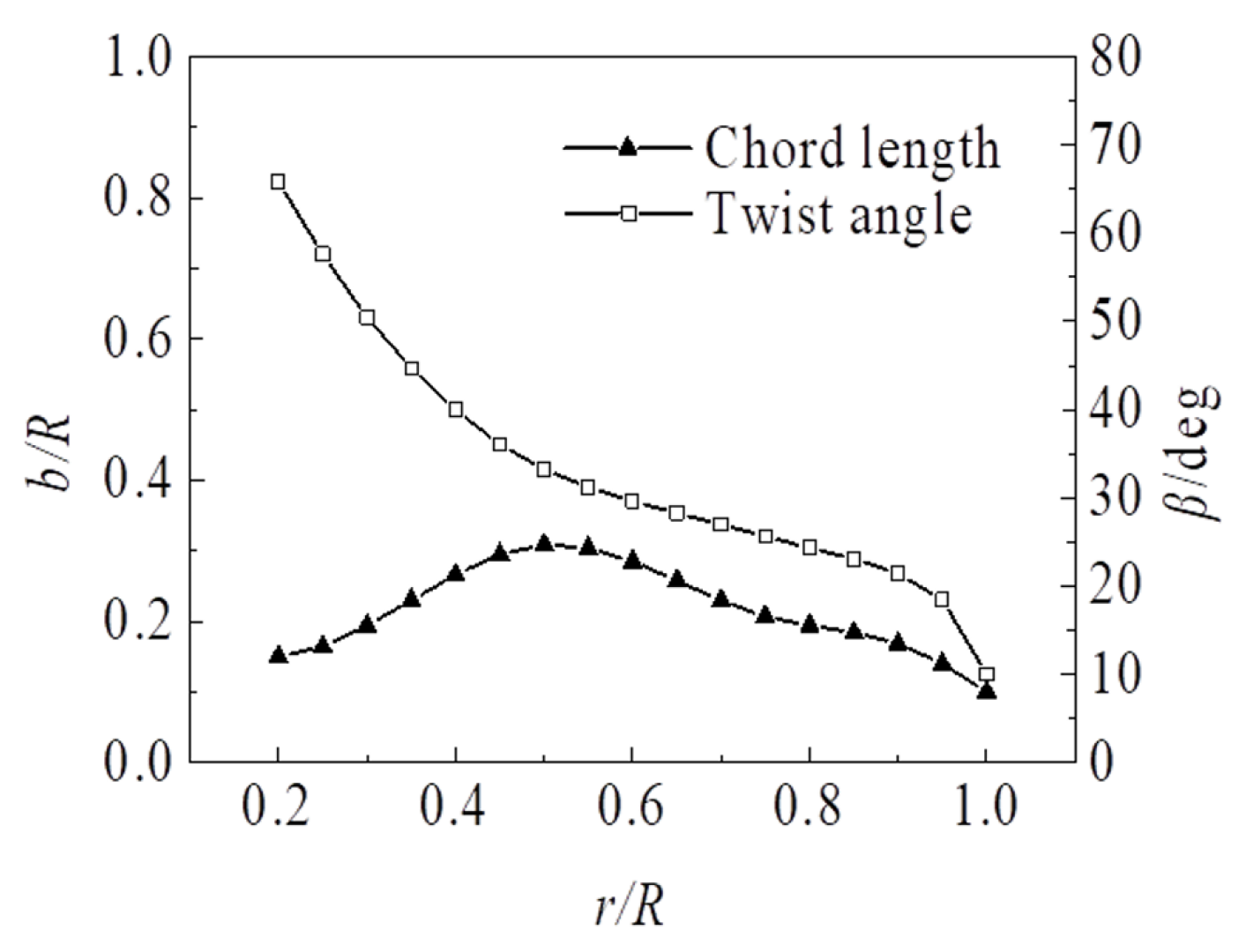
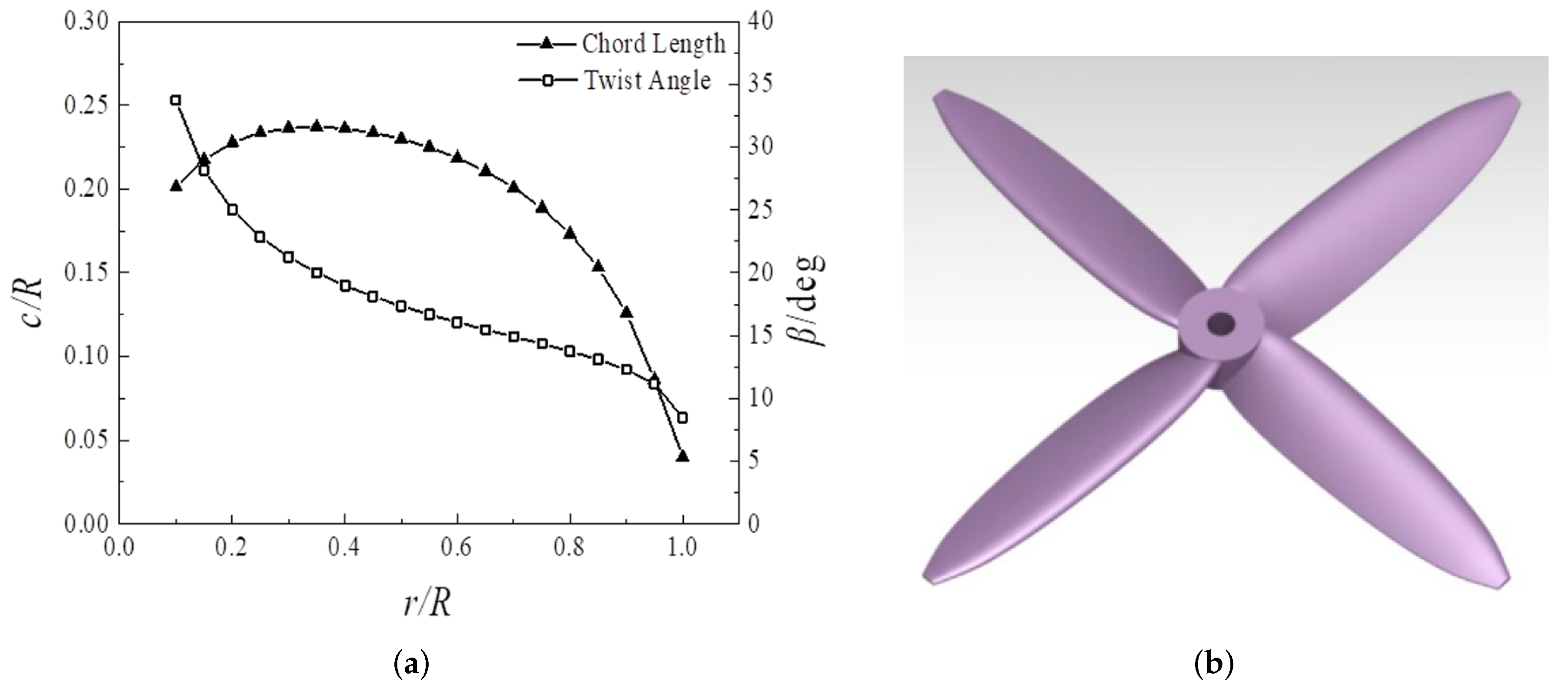
3.1. Model and Methods
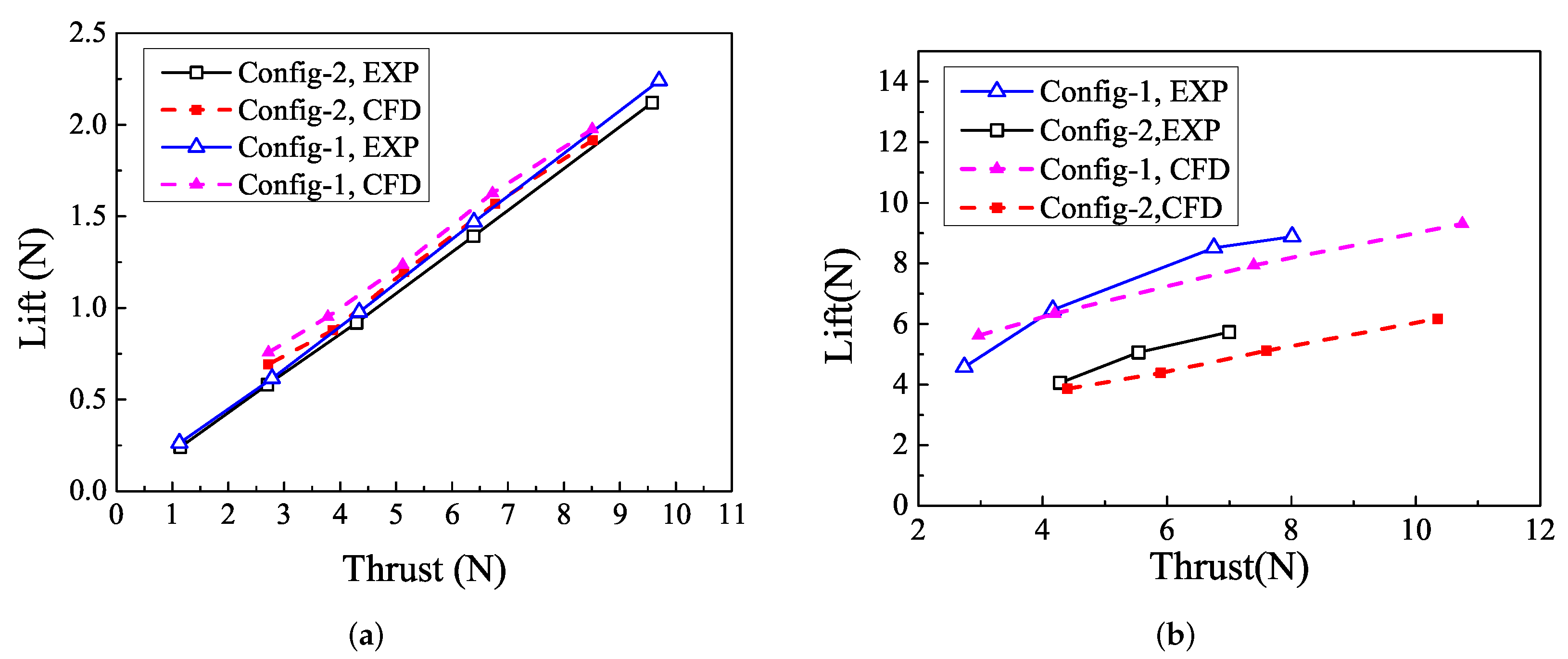
3.2. Results
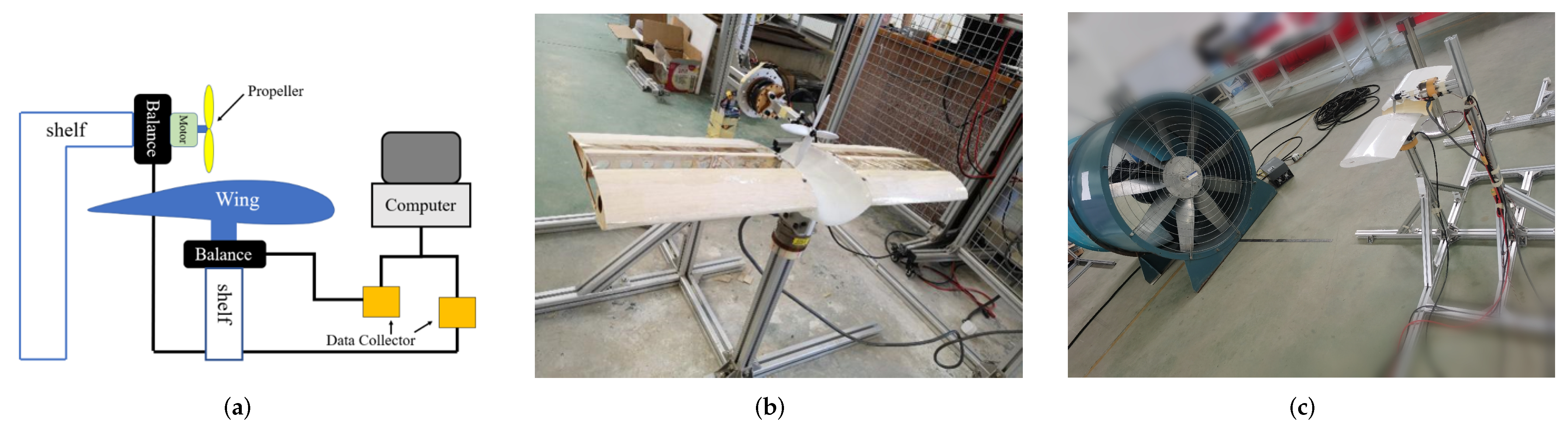
3.3. Ground Test of a Scaled Model
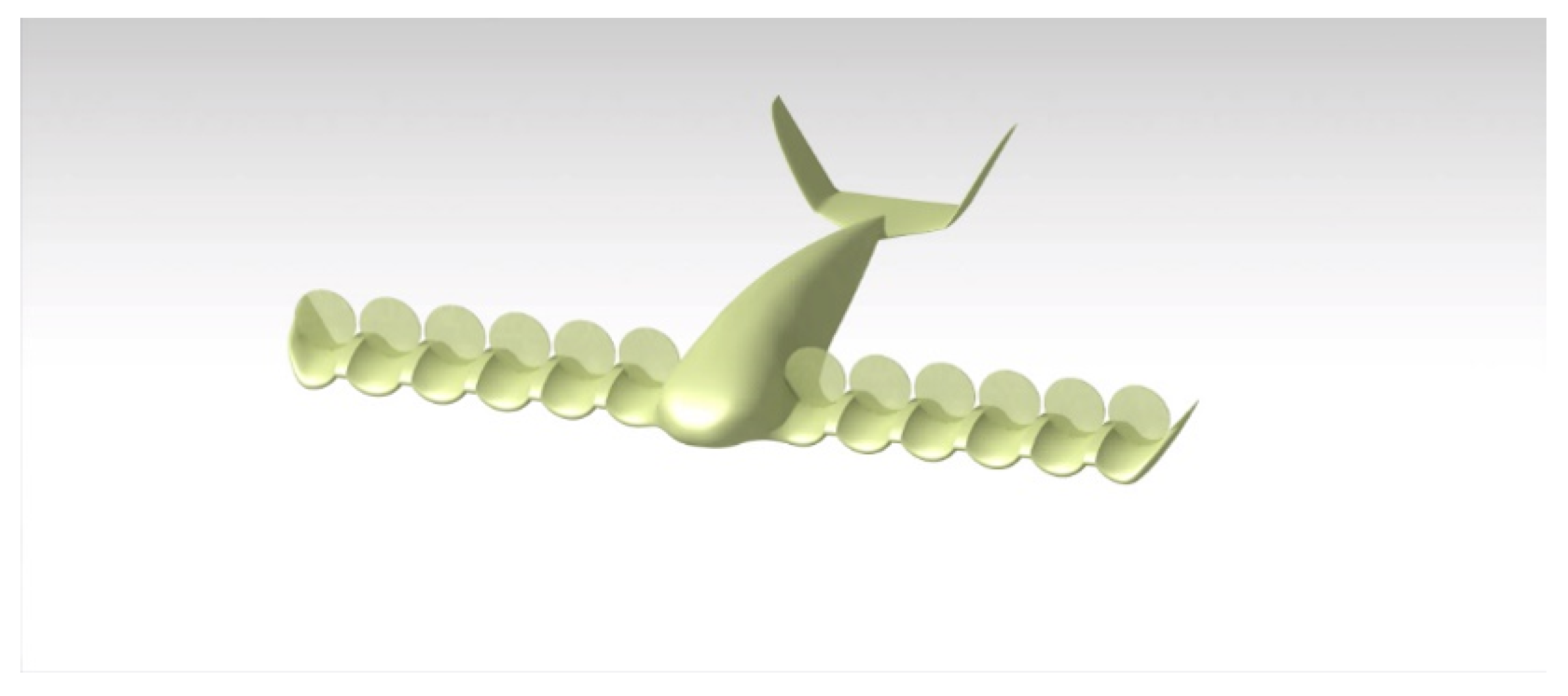
4. The Multi-Propeller Channel Wing Integration
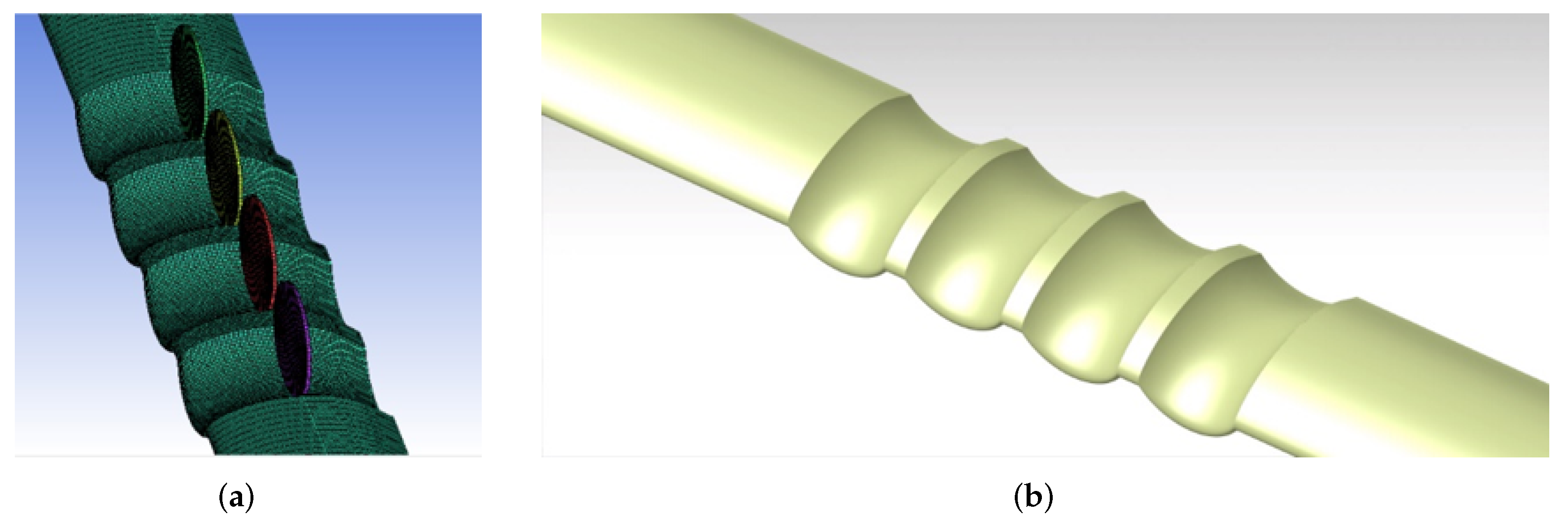
4.1. Model and Methods
4.2. Results and Discussion
4.2.1. The S/VTOL Stage
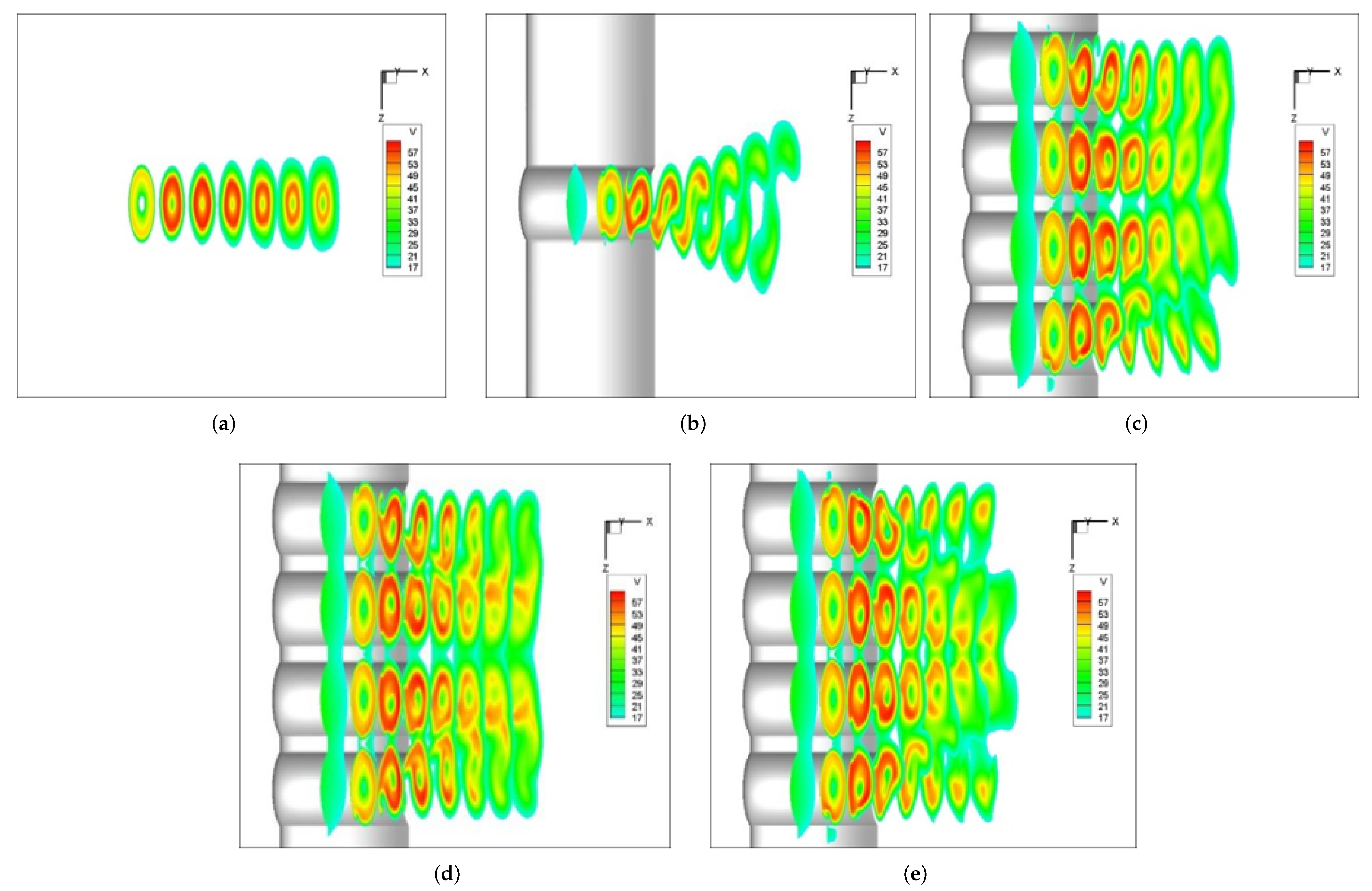
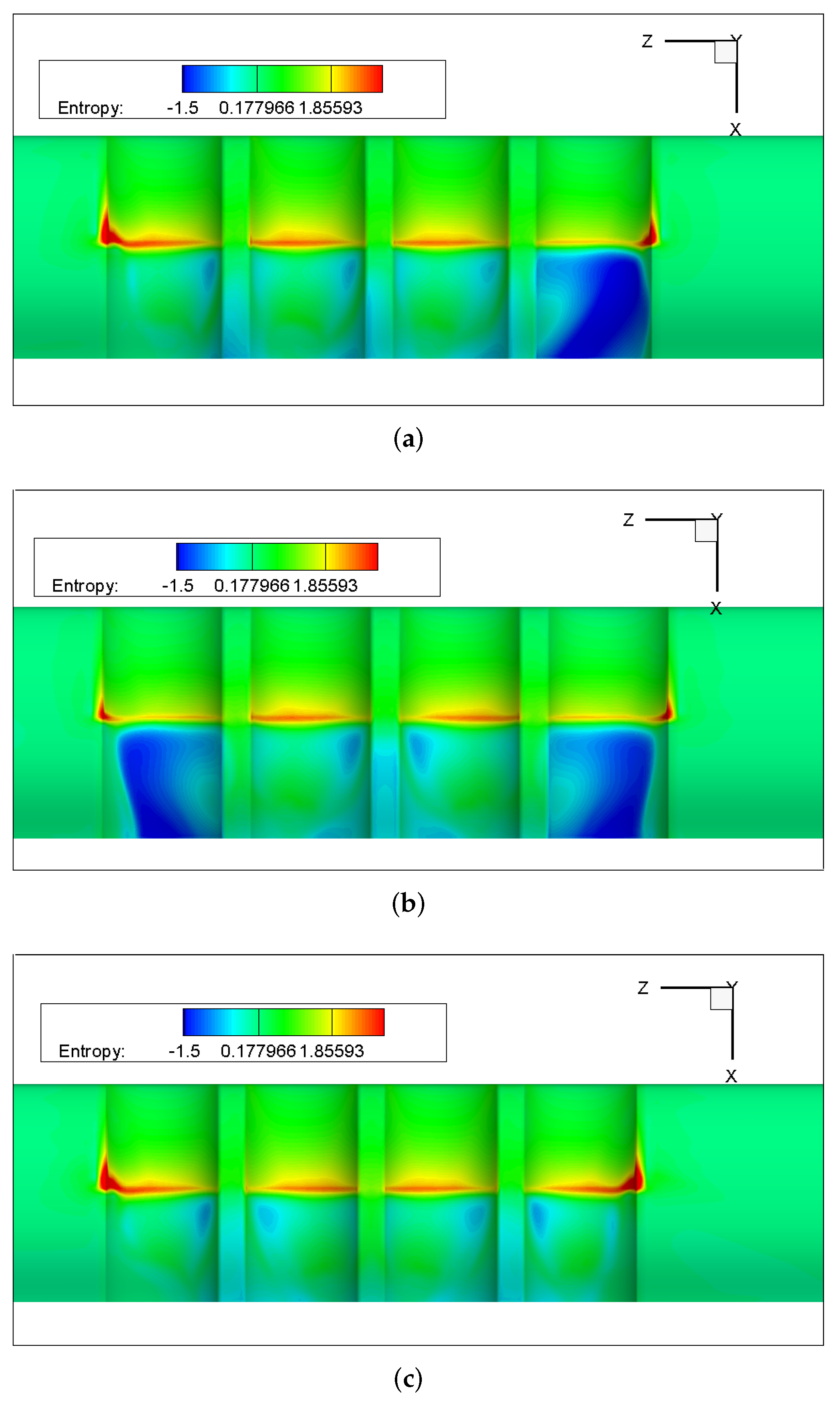
Wake Distortion and Dissipation
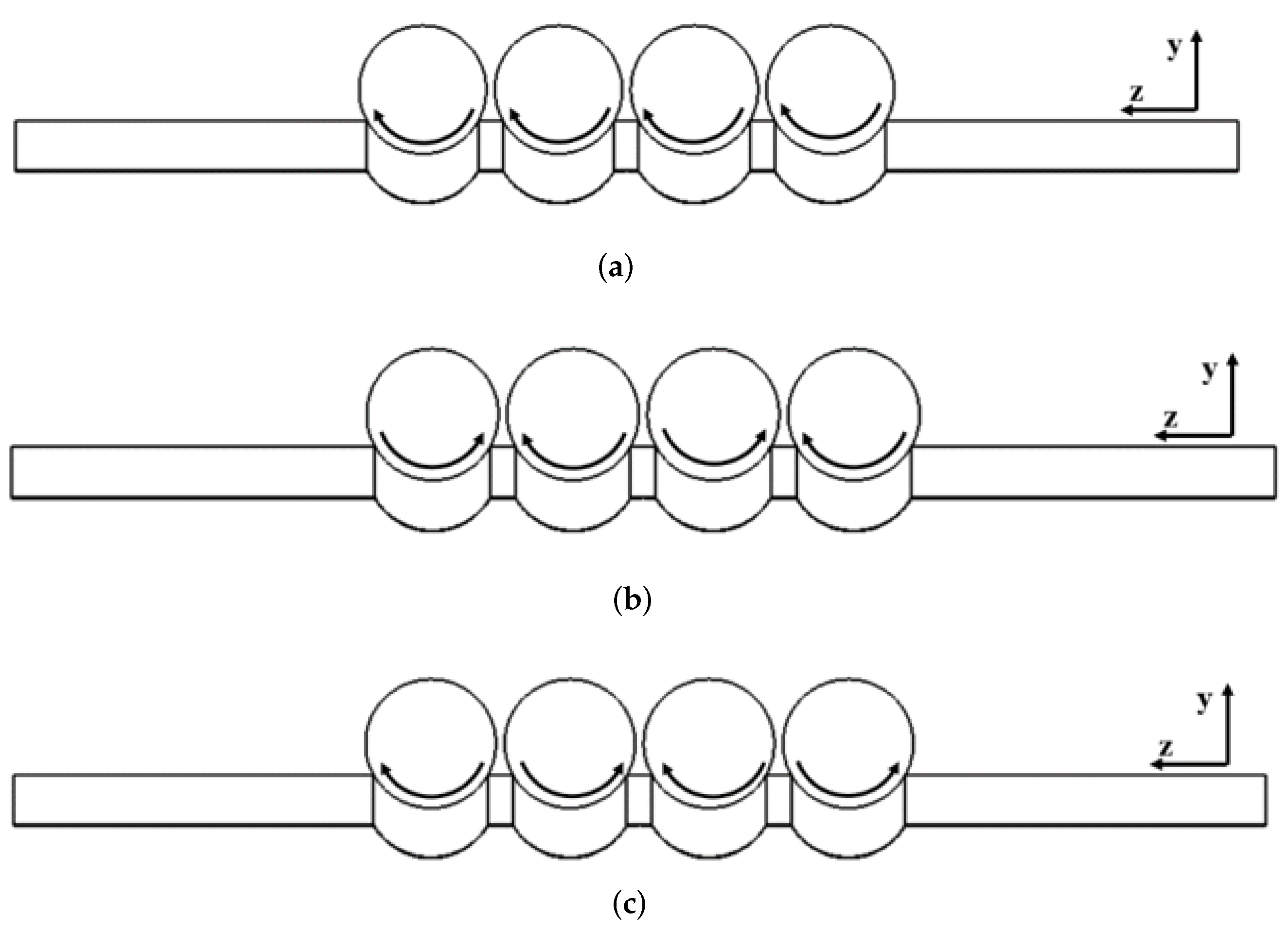
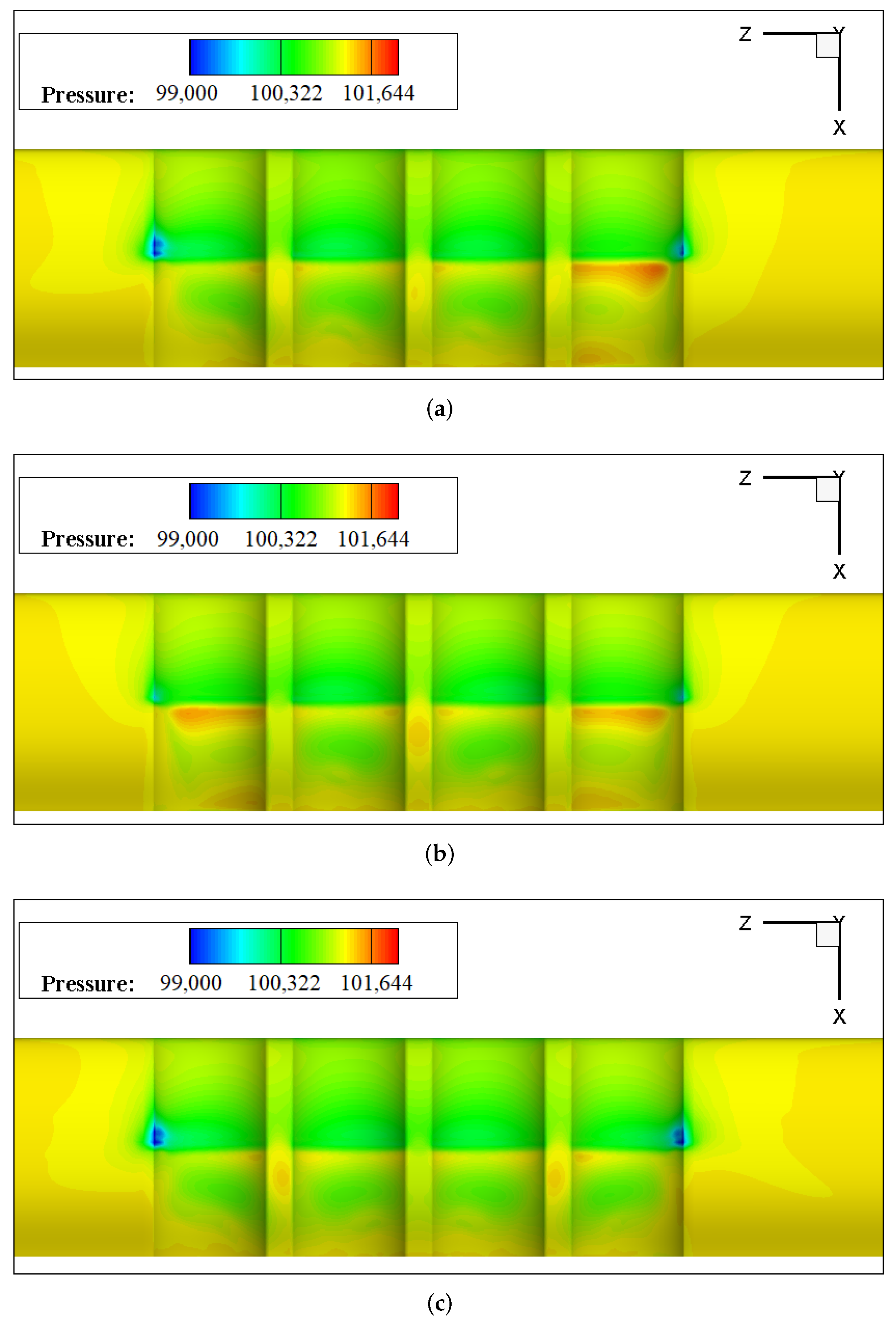
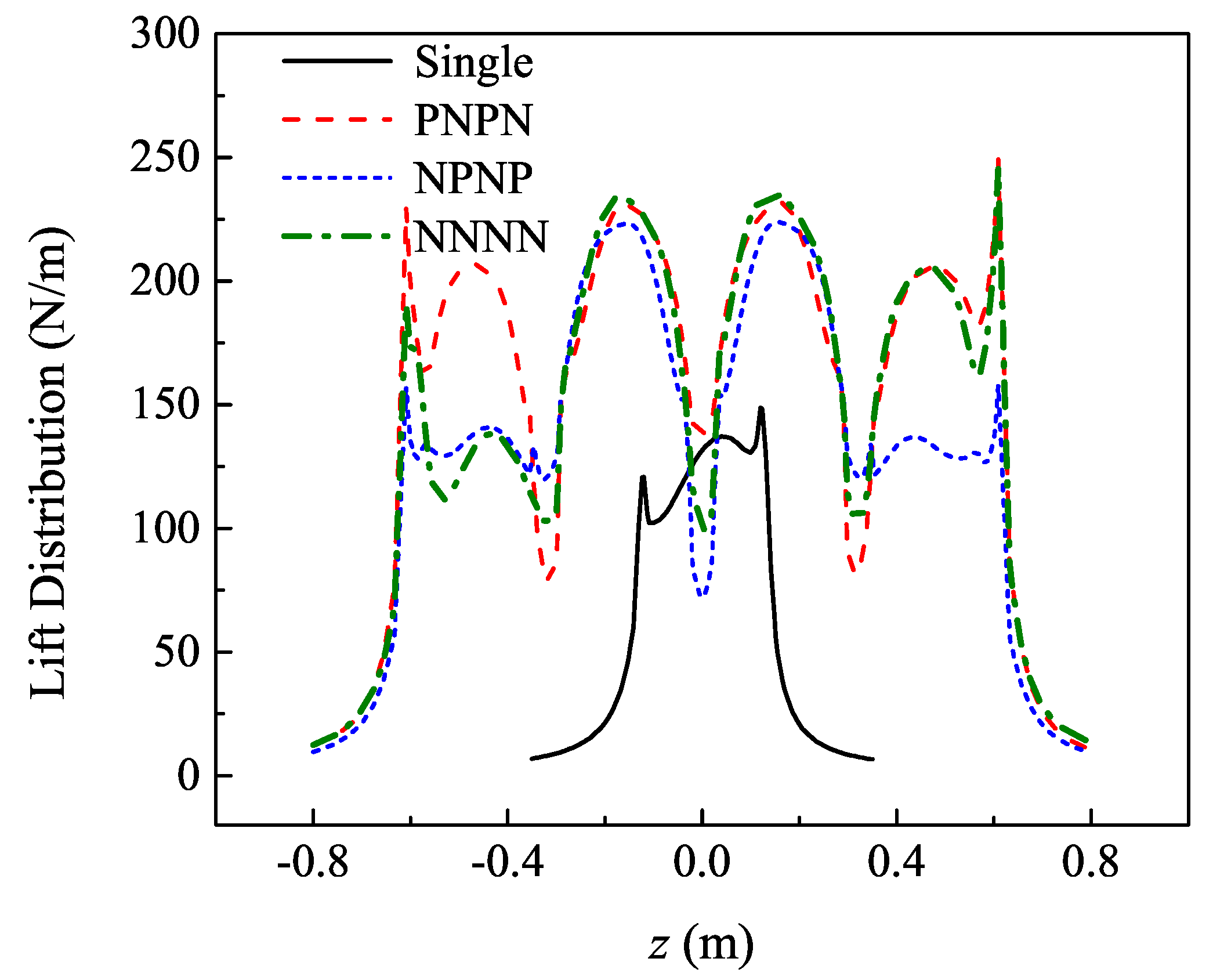
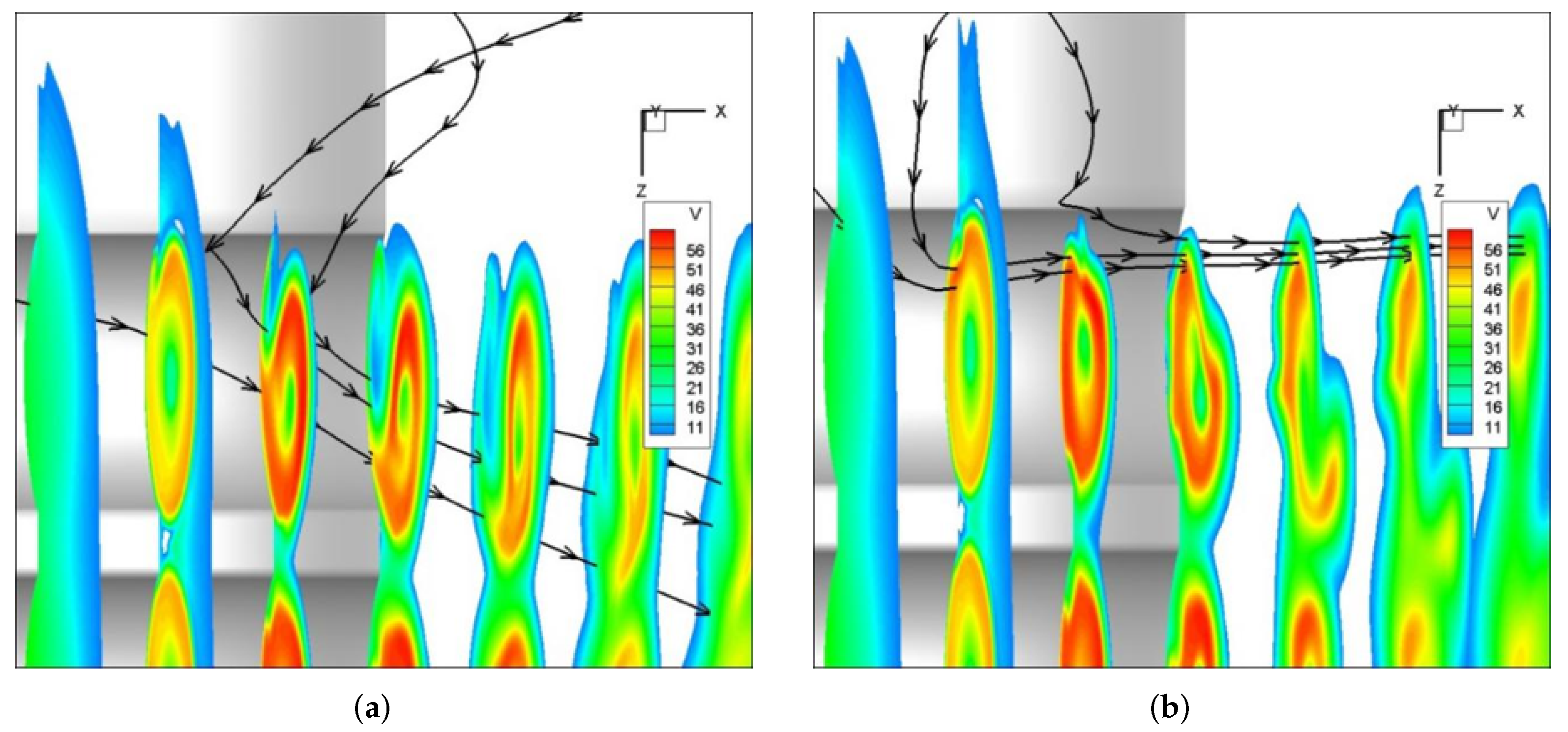
Interference between Adjacent Propellers
Entrainment of Low-Momentum Flow
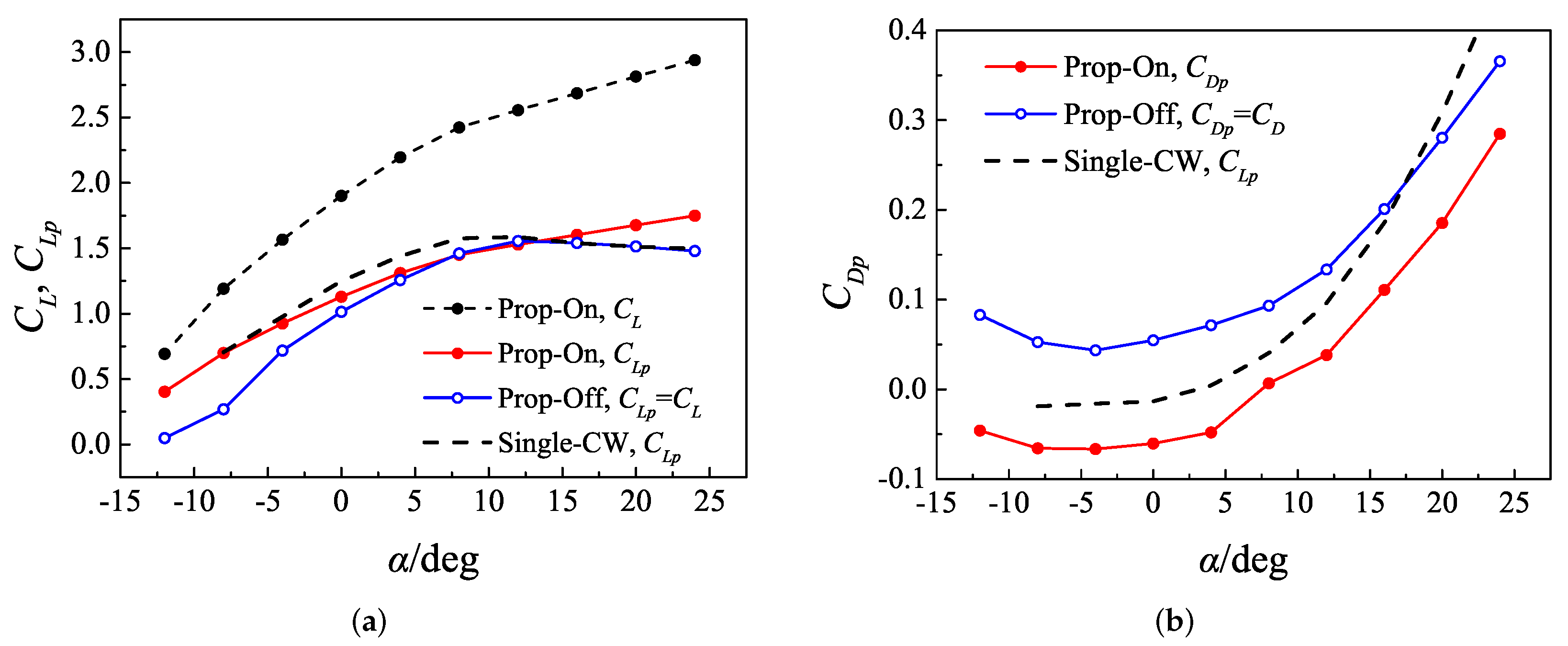
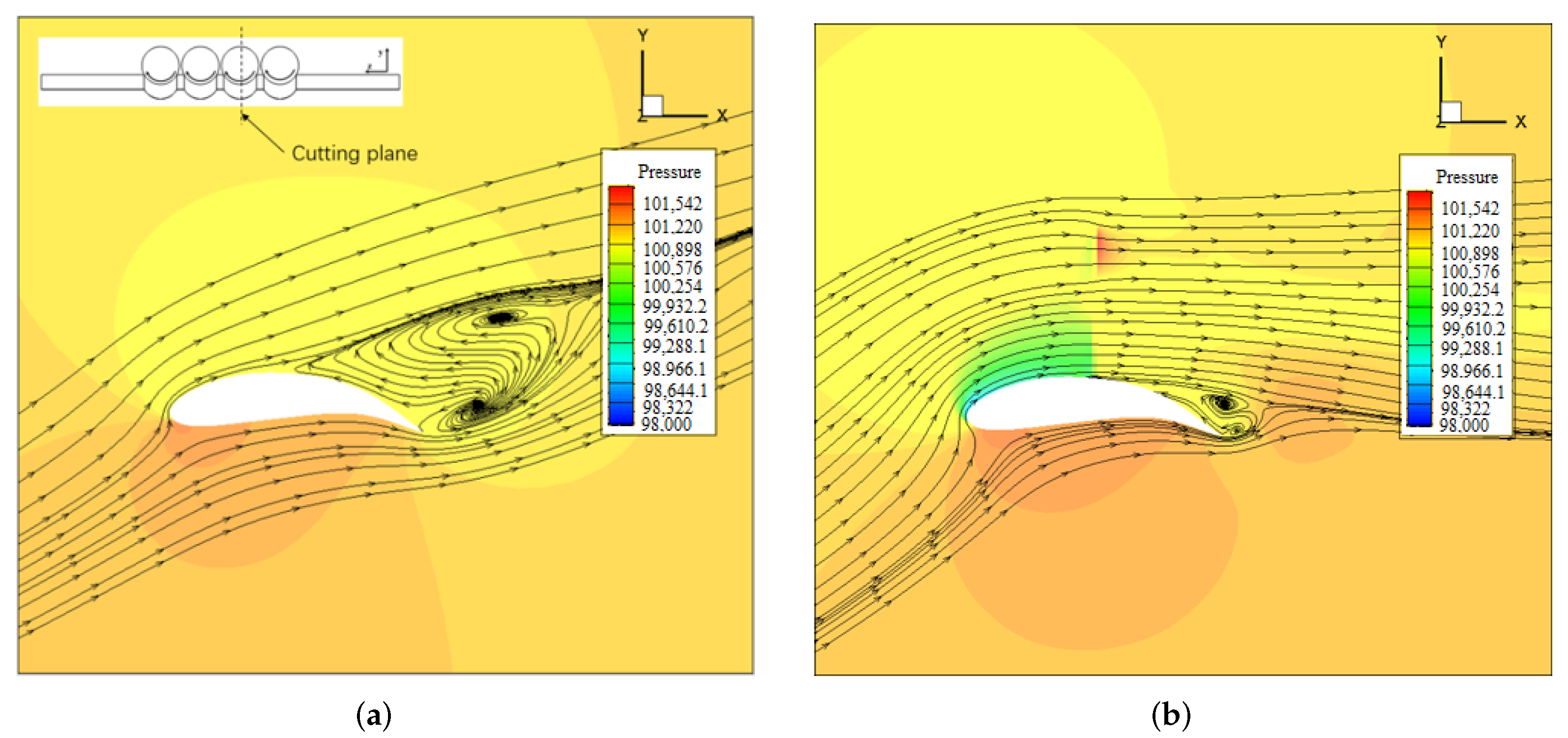
4.2.2. The Low-Speed Flight
5. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| n | rotation rate, r/min |
| freestream velocity, m/s | |
| H | altitude, m |
| air density, kg/m | |
| diameter of propeller, m | |
| J | advance ratio, |
| angle of attack of duct, degree | |
| K | lift-to-drag ratio |
| disc loading, N/m | |
| thrust coefficient of propeller, | |
| torque coefficient of propeller, | |
| blade thrust, N | |
| total thrust including blade and lip of duct, N | |
| l | wingspan, m |
| S | wing area, m |
| c | wing chord, m |
| blade twist angle, degree | |
| r | radius location of blade section, m |
| R | radius of propeller, m |
| number of propeller in distributed-propeller wing | |
| propeller induced velocity, m/s | |
| a | ratio of to |
| powered lift coefficient, | |
| powered drag coefficient, | |
| p | pressure, pa |
| pressure coefficient, | |
| Shaft power of the propeller, W | |
| power coefficient of propeller, | |
| deflect angle, degree | |
| reference frame | |
| b | blade chord, m |
| Subscripts | |
| deg | degree |
| config | configuration |
| prop | propeller |
| Abbreviations | |
| OTWP | Over-the-wing propeller |
| DEP | Distributed electric propulsion |
| CFD | Computational Fluid Dynamics |
| MRF | Multiple Reference Frame |
| MSM | Momentum Source Method |
| SLM | The method of sliding mesh |
| BET | The Blade Element Theory |
| CW | Channel wing |
| S/VTOL | Short/Vertical Take-Off and Landing |
References
- Deere, K.A.; Viken, J.K.; Viken, J.K.; Viken, S.A.; Carter, M.B.; Cox, D.; Wiese, M.R.; Farr, N. Computational component build-up for the X-57 distributed electric propulsion aircraft. In Proceedings of the AIAA Aerospace Sciences Meeting, Kissimmee, FL, USA, 8–12 January 2018. [Google Scholar]
- Rothhaar, P.M.; Murphy, P.C.; Bacon, B.J.; Gregory, I.M.; Grauer, J.A.; Busan, R.C.; Croom, M.A. NASA langley distributed propulsion VTOL tilt-wing aircraft testing, modeling, simulation, control, and flight test development. In Proceedings of the AIAA AVIATION 2014 -14th AIAA Aviation Technology, Integration, and Operations Conference, Atlanta, GA, USA, 16 June 2014. [Google Scholar]
- Wang, K.; Zhou, Z.; Zhu, X.; Xu, X. Aerodynamic design of multi-propeller/wing integration at low Reynolds numbers. Aerosp. Sci. Technol. 2019, 84, 1–17. [Google Scholar] [CrossRef]
- Englar, R.J.; Campbell, B.A. Development of pneumatic channel wing powered-lift advanced super-STOL aircraft. In Proceedings of the 20th AIAA Applied Aerodynamics Conference, St. Louis, MO, USA, 24–26 June 2002. [Google Scholar]
- Muller, L.; Heinze, W.; Kozulovic, D.; Hepperle, M.; Radespiel, R. Aerodynamic installation effects of an over-The-wing propeller on a high-lift configuration. J. Aircr. 2014, 51, 249–258. [Google Scholar] [CrossRef]
- Muller, L.; Friedrichs, J.; Koulovi, D. Unsteady flow simulations of an over-the-wing propeller configuration. In Proceedings of the 50th AIAA/ASME/SAE/ASEE Joint Propulsion Conference 2014, Cleveland, OH, USA, 28 July 2014. [Google Scholar]
- Beck, S.C.; Muller, L.; Langer, S.C. Numerical assessment of the vibration control effects of porous liners on an over-the-wing propeller configuration. Ceas Aeronaut. J. 2016, 7, 275–286. [Google Scholar] [CrossRef]
- Wang, H.; Zhu, X.; Zhou, Z. Numerical simulation of the propeller/wing interactions at low reynolds number. In Proceedings of the 30th Congress of the International Council of the Aeronautical Sciences, Daejeon, Korea, 25 September 2016. [Google Scholar]
- Wang, H.; Zhu, X.; Zhou, Z.; Zhang, Y. New Configuration Design and Analysis for a Vertical Take-off/Hovering Solar Powered Aircraft. J. Northwestern Polytech. Univ. 2017, 35, 189–196. [Google Scholar]
- Marcus, E.A.P.; De Vries, R.; Kulkarni, A.R.; Veldhuis, L.L.M. Aerodynamic Investigation of an Over-The-Wing Propeller for Distributed Propulsion. In Proceedings of the AIAA Aerospace Sciences Meeting, Kissimmee, FL, USA, 8–12 January 2018. [Google Scholar]
- Schetz, J.A.; Hosder, S.; Dippold, V., III; Walker, J. Propulsion and Aerodynamic Performance Evaluation of Jet-Wing Distributed Propulsion. Aerosp. Sci. Technol. 2010, 14, 1–10. [Google Scholar] [CrossRef]
- Traub, L.W. Effect of a Pusher Propeller On a Delta Wing. Aerosp. Sci. Technol. 2016, 48, 115–121. [Google Scholar] [CrossRef]
- Yang, Y.; Zhou, T.; Sciacchitano, A.; Veldhuis, L.L.M.; Eitelberg, G. Experimental Investigation of the Impact of a Propeller On a Streamwise Impinging Vortex. Aerosp. Sci. Technol. 2017, 69, 582–594. [Google Scholar] [CrossRef]
- Alba, C.; Elham, A.; Veldhuis, L.L.M.; German, B.J. A Surrogate-Based Multi-Disciplinary Design Optimization Framework Exploiting Wing-Propeller Interaction. In Proceedings of the 18th AIAA/ISSMO Multidisciplinary Analysis and Optimization Conference, Denver, CO, USA, 5–9 June 2017. [Google Scholar]
- Ananda, G.K.; Selig, M.S.; Deters, R.W. Experiments of Propeller-Induced Flow Effects On a low-Reynolds-number Wing. AIAA J. 2018, 56, 3279–3294. [Google Scholar] [CrossRef] [Green Version]
- Guruswamy, G.P. Dynamic Aeroelasticity of Wings with Tip Propeller by Using Navier-Stokes Equations. AIAA J. 2019, 57, 3200–3205. [Google Scholar] [CrossRef]
- Cochrane, J.A.; Carros, R.J. Hybrid Upper Surface Blown Flap Propulsive-Lift Concept for the QSRLP. J. Aircr. 1976, 13, 855–860. [Google Scholar] [CrossRef]
- Harrison, N.A.; Vassberg, J.C.; DeHaan, M.A.; Gea, L. The Design and Test of a Swept Wing Upper Surface Blowing (USB) Concept. In Proceedings of the 51st AIAA Aerospace Sciences Meeting Including the New Horizons Forum and Aerospace Exposition 2013, Grapevine, TX, USA, 7–10 January 2013. [Google Scholar]
- Dragan, V. A Study of Conventional Upper Surface Blown Wing Configurations. Rev. Air Force Acad. 2012, 1, 9–12. [Google Scholar]
- Radespiel, R.; Kamruzzaman, M. Use of Upper Surface Blowing and Circulation Control for Gapless High-Lift Configurations. In Proceedings of the CEAS/KATnet Conference on Key Aerodynamics Technologies, Bremen, Germany, 20–22 June 2005. [Google Scholar]
- Keen, E.B.; Mason, W.H. A Conceptual Design Methodology for Predicting the Aerodynamics of Upper Surface Blowing On Airfoils and Wings. In Proceedings of the Collection of Technical Papers–AIAA Applied Aerodynamics Conference, Toronto, ON, Canada, 6 June 2005; pp. 1253–1267. [Google Scholar]
- Hill, G.A.; Kandil, O.A.; Hahn, A.S. Aerodynamic Investigations of an Advanced Over-The-Wing Nacelle Transport Aircraft Configuration. J. Aircr. 2009, 46, 25–35. [Google Scholar] [CrossRef]
- Dumitrache, A.; Frunzulica, F.; Preotu, O. Applications of the Coanda Effect in Aeronautics. In Proceedings of the 2018 9th International Conference on Mechanical and Aerospace Engineering, Budapest, Hungary, 10–13 July 2018; pp. 121–125. [Google Scholar]
- Kalman, J.; Grunwald, K.; Goodson, W. Aerodynamic Loads on an Isolated Shrouded-Propeller Configuration for Angels of Attack from −10° to 110°; NASA TN D-995; NASA: Washington, DC, USA, 1962. [Google Scholar]
- Zhenfeng, X. Numerical Approaches of Propeller Slipstream Simulations and Aerodynamic Interference Analysis. Ph.D. Thesis, Northwestern Polytechnical University, Xi’an China, 2015. [Google Scholar]
- Liu, P. Theory and Application of Airscrew; Beihang University Press: Beijing, China, 2008. [Google Scholar]
- Fan, Z.; Zhou, Z.; Zhu, X.; Guo, J. Coupled Aerodynamic Analysis and Airfoil Optimization Design for Over-Wing Propeller Configuration. Acta Aeronaut. Astronaut. Sin. 2019, 40, 73–87. [Google Scholar]
- Fan, Z.; Zhou, Z.; Zhu, X. A Design Method for Propeller with Arbitrary Circulation Distribution. J. Aerosp. Power 2019, 34, 434–441. [Google Scholar]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case | (deg) | Relative Error (%) | |||
|---|---|---|---|---|---|
| Exp | 90 | 0.17102 | 0.40891 | ||
| 70 | 0.1801 | 0.41501 | |||
| 50 | 0.18339 | 0.40484 | |||
| MRF-1 | 90 | 0.16569 | 0.40486 | −3.11659 | −0.99044 |
| 70 | 0.16637 | 0.40706 | −7.62354 | −1.91562 | |
| 50 | 0.1657 | 0.41343 | −9.64611 | 2.12183 | |
| MRF-2 | 90 | 0.16556 | 0.40084 | −3.19261 | −1.97354 |
| 70 | 0.16558 | 0.40643 | −8.06219 | −2.06742 | |
| 50 | 0.16511 | 0.41094 | −9.96783 | 1.50677 | |
| MSM | 90 | 0.16802 | 0.40868 | −1.75418 | −0.05625 |
| 70 | 0.16571 | 0.40885 | −7.99001 | −1.48430 | |
| 50 | 0.16417 | 0.40944 | −10.48040 | 1.13625 | |
| SLM | 90 | 0.16572 | 0.40172 | −3.09905 | −1.75833 |
| 70 | 0.16576 | 0.40753 | −7.96224 | −1.80237 | |
| 50 | 0.16535 | 0.41224 | −9.83696 | 1.82788 | |
| MRF-SA | 90 | 0.16694 | 0.44340 | −2.38436 | 8.43492 |
| 70 | 0.16693 | 0.44151 | −7.31426 | 6.38431 | |
| 50 | 0.16368 | 0.40827 | −10.74884 | 0.84708 | |
| Model | Case | Lift/N | Drag/N | /N | a | |||
|---|---|---|---|---|---|---|---|---|
| Config-2 | MSM | 36.18 | −2.26 | 112.034 | 24.942 | 2.2155 | −0.1385 | 0.3074 |
| SLM | 36.84 | −2.27 | 119.231 | 25.731 | 2.1420 | −0.1320 | 0.3271 | |
| prop-off | 0.1972 | 0.00805 | 0 | 0 | 0.4236 | 0.017 | 0 | |
| Config-1 | MSM | 45.90 | −1.02 | 111.166 | 24.845 | 2.8291 | −0.0631 | 0.3050 |
| SLM | 45.13 | −0.97 | 118.628 | 25.666 | 2.6353 | −0.0569 | 0.3254 | |
| prop-off | 0.5358 | 0.02871 | 0 | 0 | 1.15 | 0.062 | 0 | |
| Iso-prop | MSM | - | - | 112.986 | 25.048 | - | - | 0.3100 |
| SLM | - | - | 119.180 | 25.725 | - | - | 0.3270 |
| Rotiation Direction | (N) | (W) | y-Force (N) | x-Force (N) | Induction Rate | x-Moment (Nm) | (kg/kw) |
|---|---|---|---|---|---|---|---|
| NNNN | 426.006 | 18,555.26 | 235.5194 | −19.5806 | 0.552855 | −9.04 | 2.71 |
| NPNP | 431.752 | 18,561.66 | 209.5351 | −10.6685 | 0.485314 | 0.16 | 2.64 |
| PNPN | 425.285 | 18,387.67 | 248.3217 | −13.113 | 0.583895 | 0.29 | 2.74 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, J.; Fan, Z.; Chang, M.; Wang, G. Coupling Effects on Distributed Multi-Propeller Channel Wing at Low Speed Condition. Energies 2022, 15, 5352. https://doi.org/10.3390/en15155352
Zhao J, Fan Z, Chang M, Wang G. Coupling Effects on Distributed Multi-Propeller Channel Wing at Low Speed Condition. Energies. 2022; 15(15):5352. https://doi.org/10.3390/en15155352
Chicago/Turabian StyleZhao, Junmin, Zhongyun Fan, Min Chang, and Gang Wang. 2022. "Coupling Effects on Distributed Multi-Propeller Channel Wing at Low Speed Condition" Energies 15, no. 15: 5352. https://doi.org/10.3390/en15155352