
Modeling and Vector Control of a Cage+Nested-Loop Rotor Brushless Doubly Fed Induction Motor


Abstract
:1. Introduction
2. BDFIM Coupled Circuit Model
2.1. Full-State Frame Coupled Circuit Model
2.2. BDFIM -Reference Frame Model
2.2.1. Transformation Matrices
2.2.2. BDFIM -Reference Frame Modeling
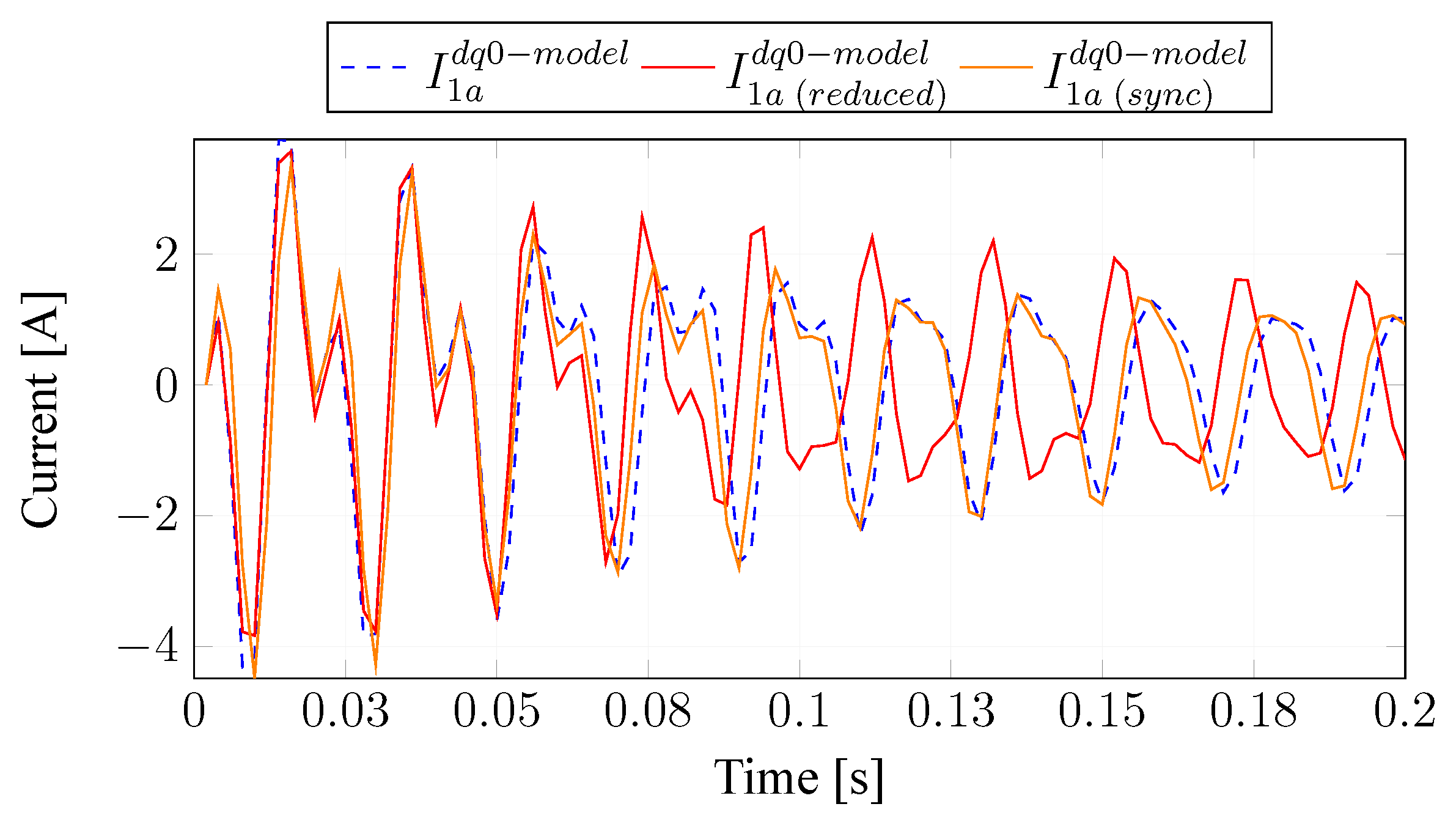
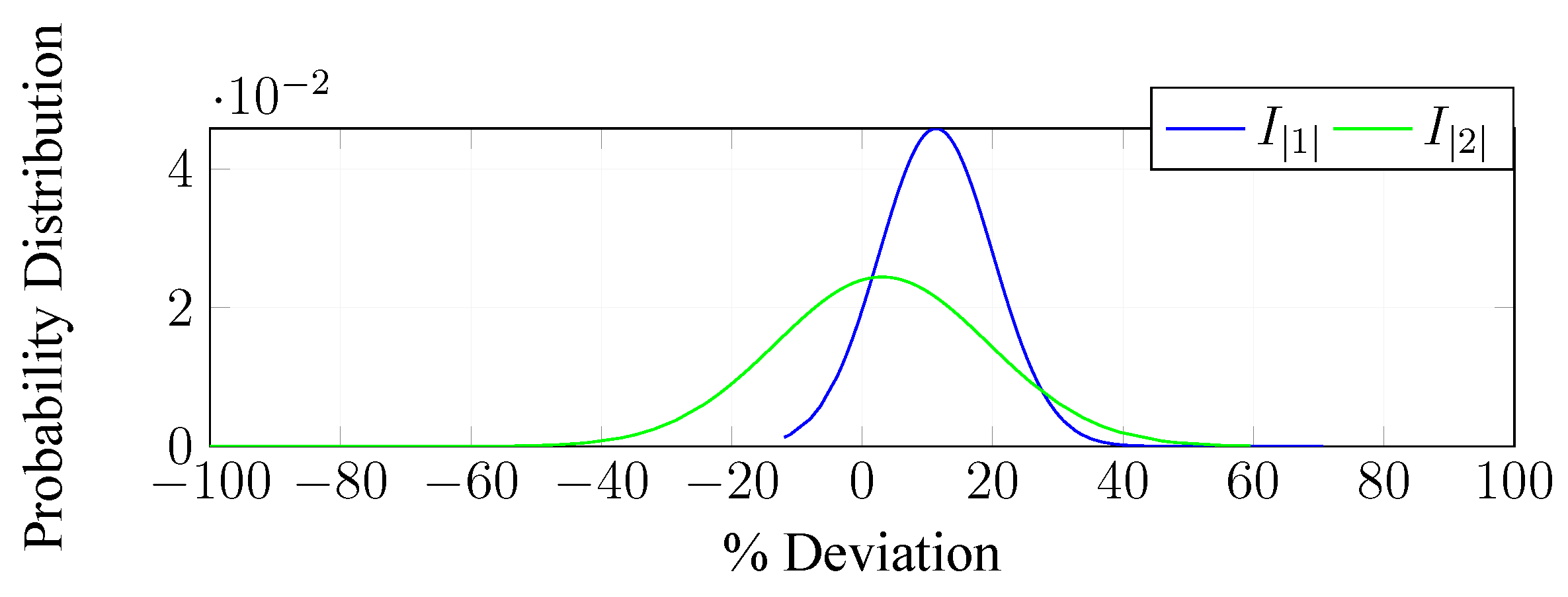
2.3. Component Selection for Reduced Order Model
- A matrix which consists of eigenvectors of must be obtained and ordered such that its eigenvalues decrease from left to right.
- must be partitioned into two submatrices where is two columns wide.
- Reduce the state order of the full-state -reference frame BDFIM model by applying the nonsquare state transformationwhere is an identity matrix.
2.4. Transformation into the Synchronous Space
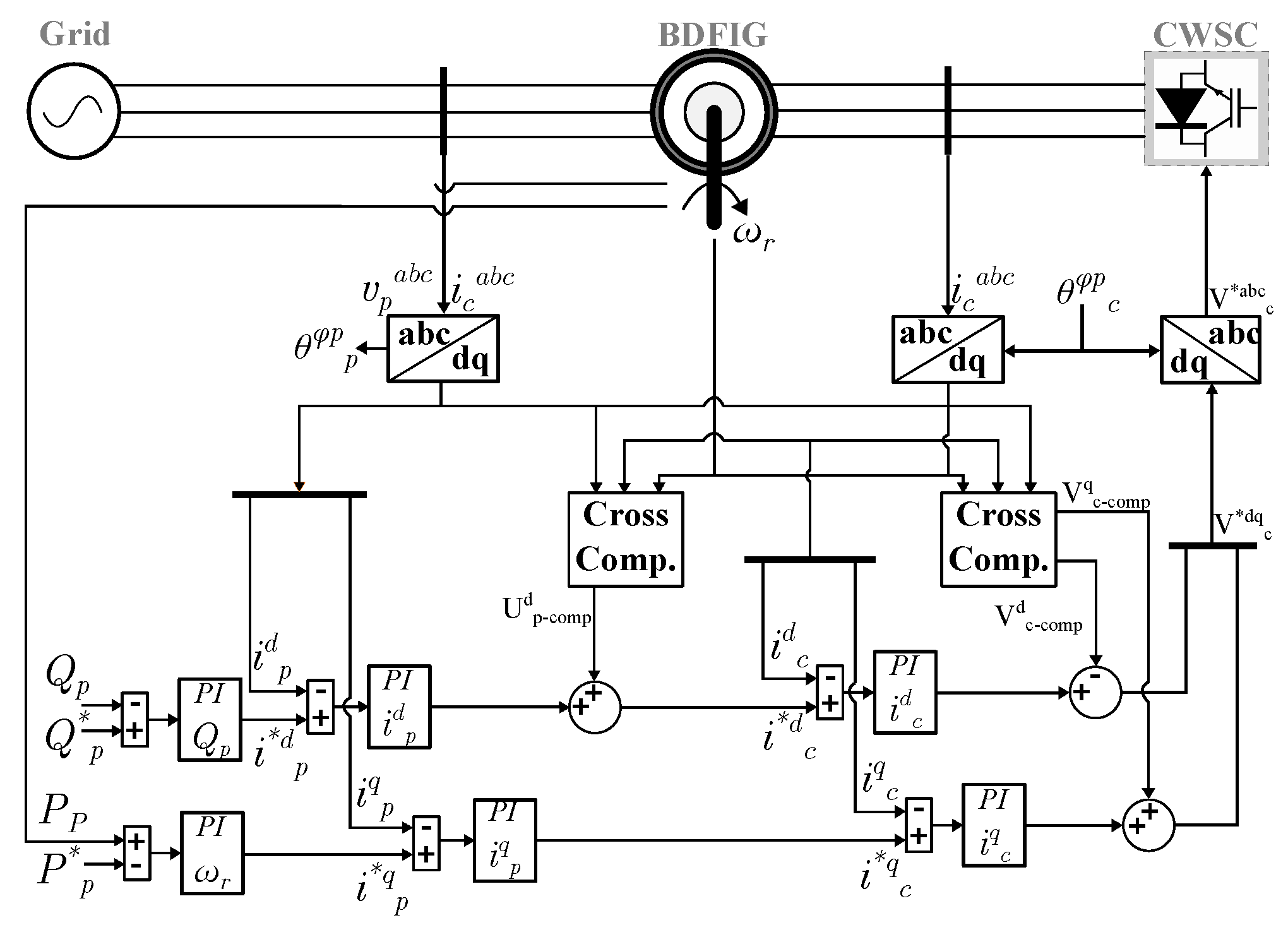
3. Control Winding Controller
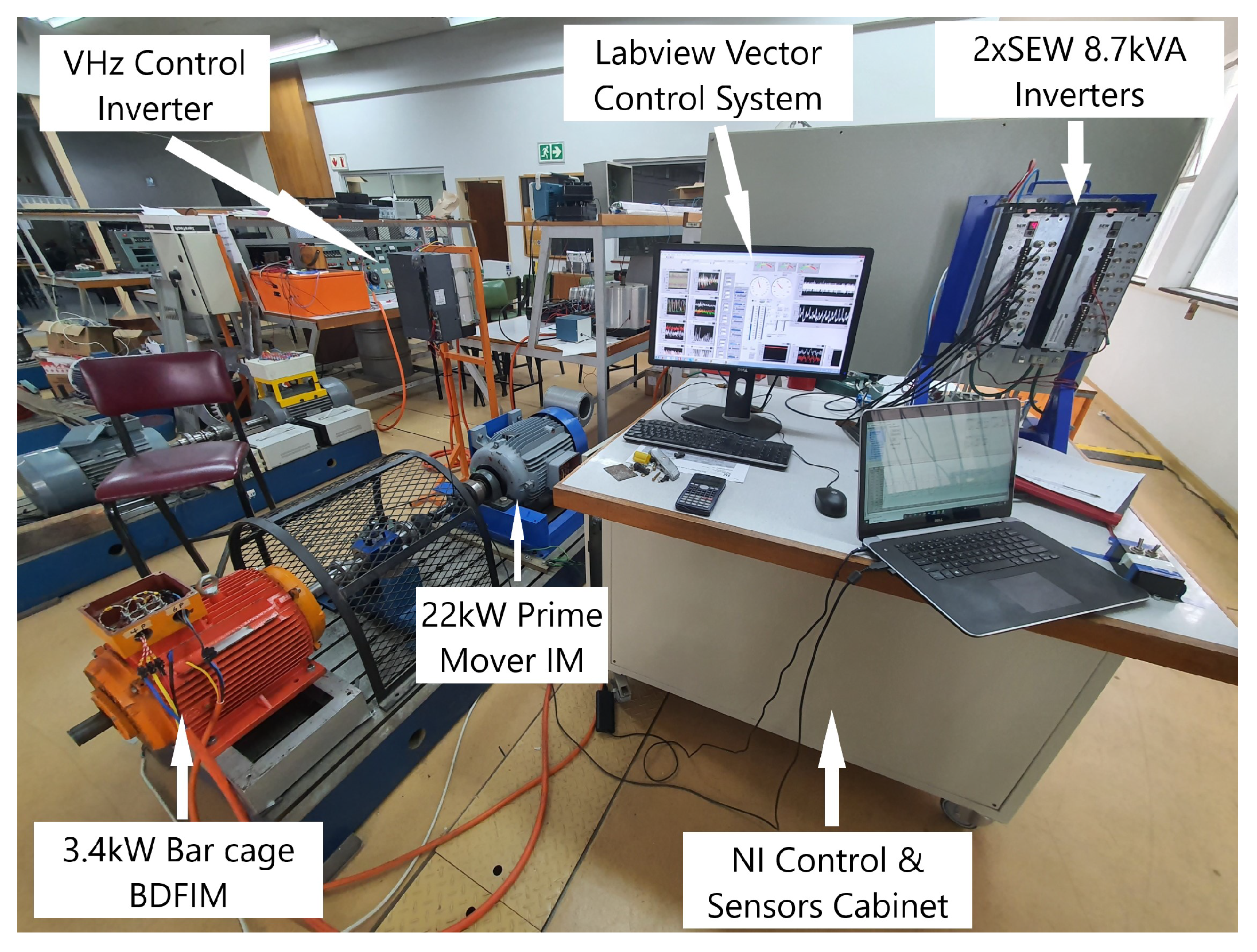
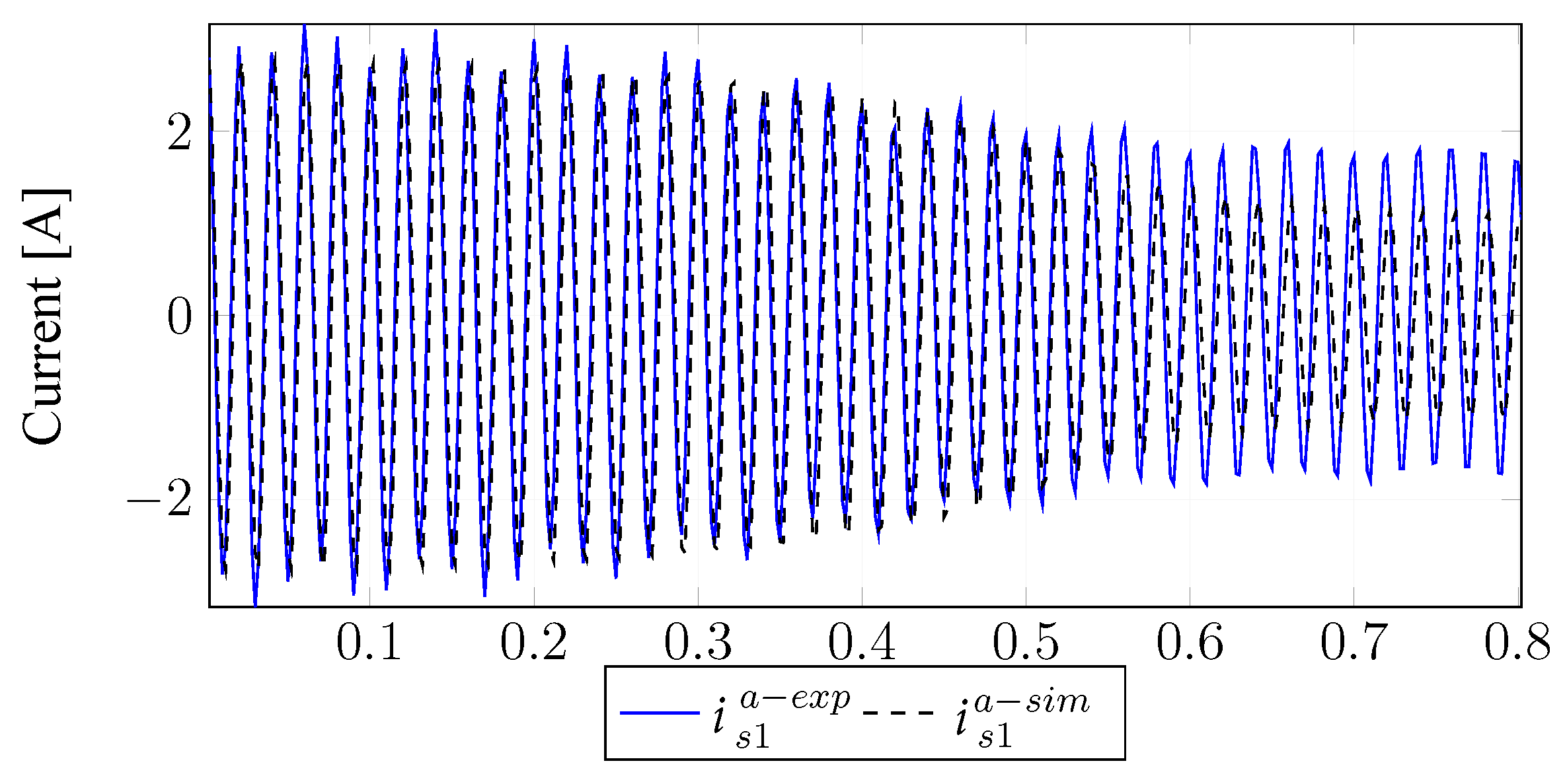
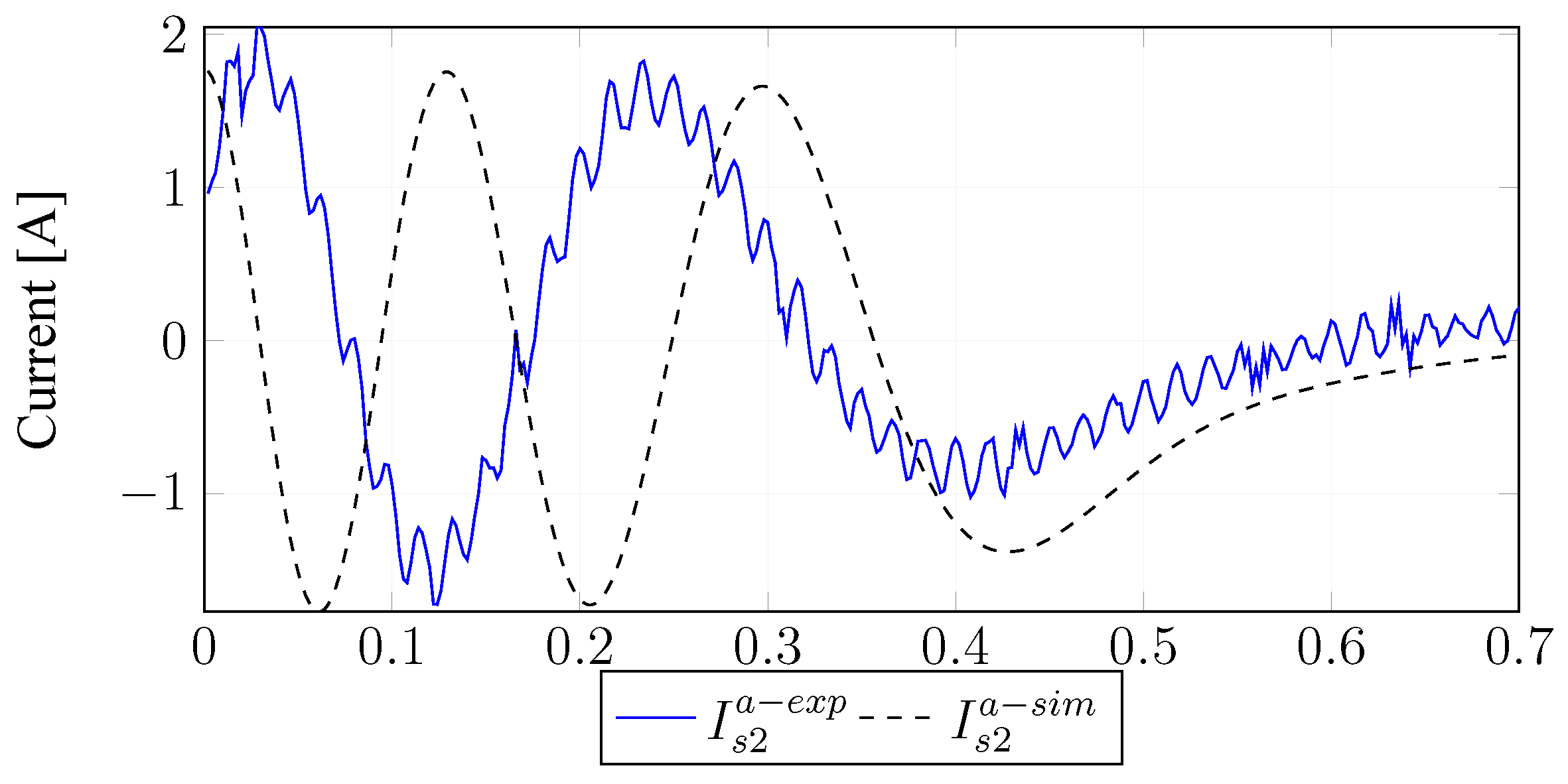
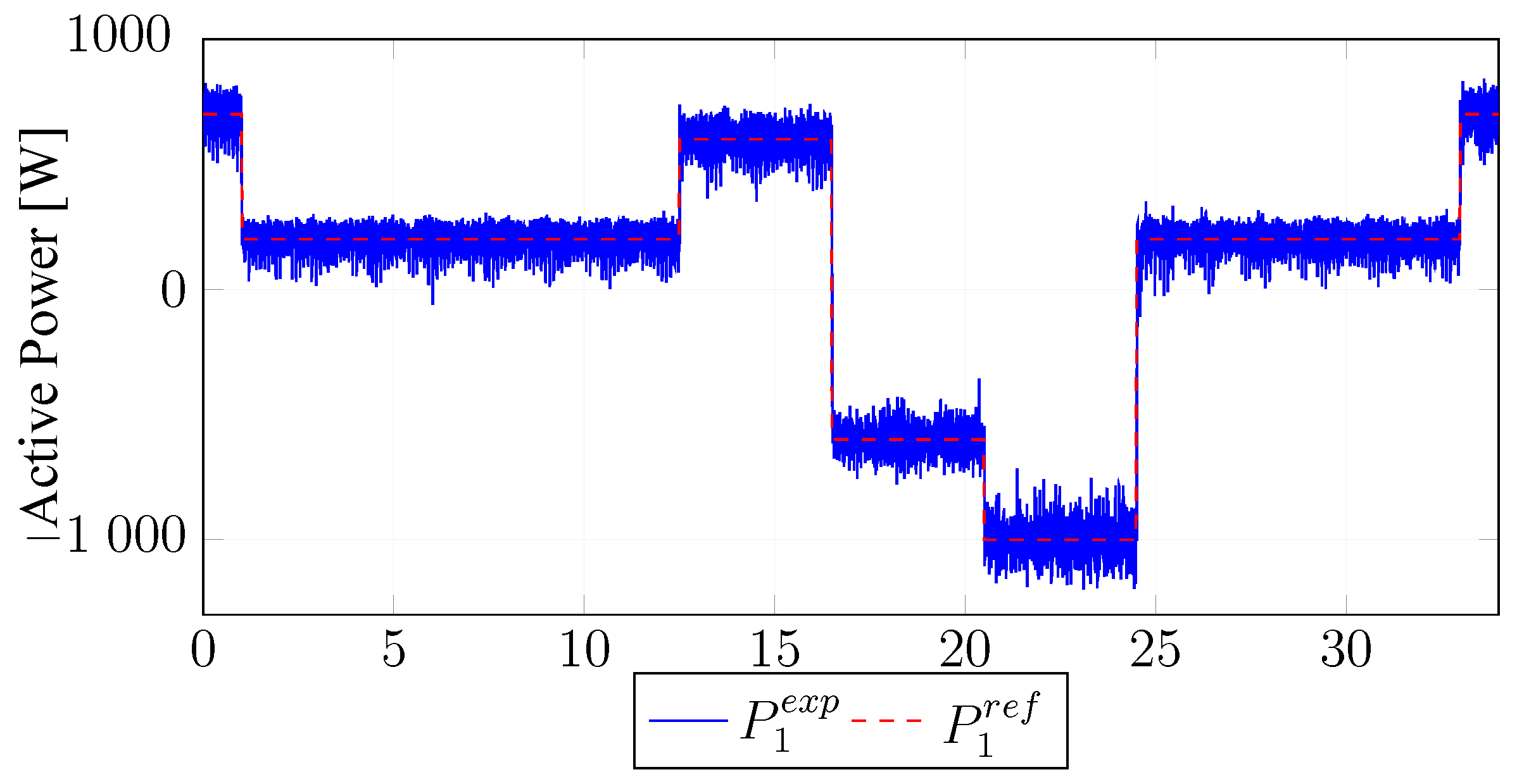
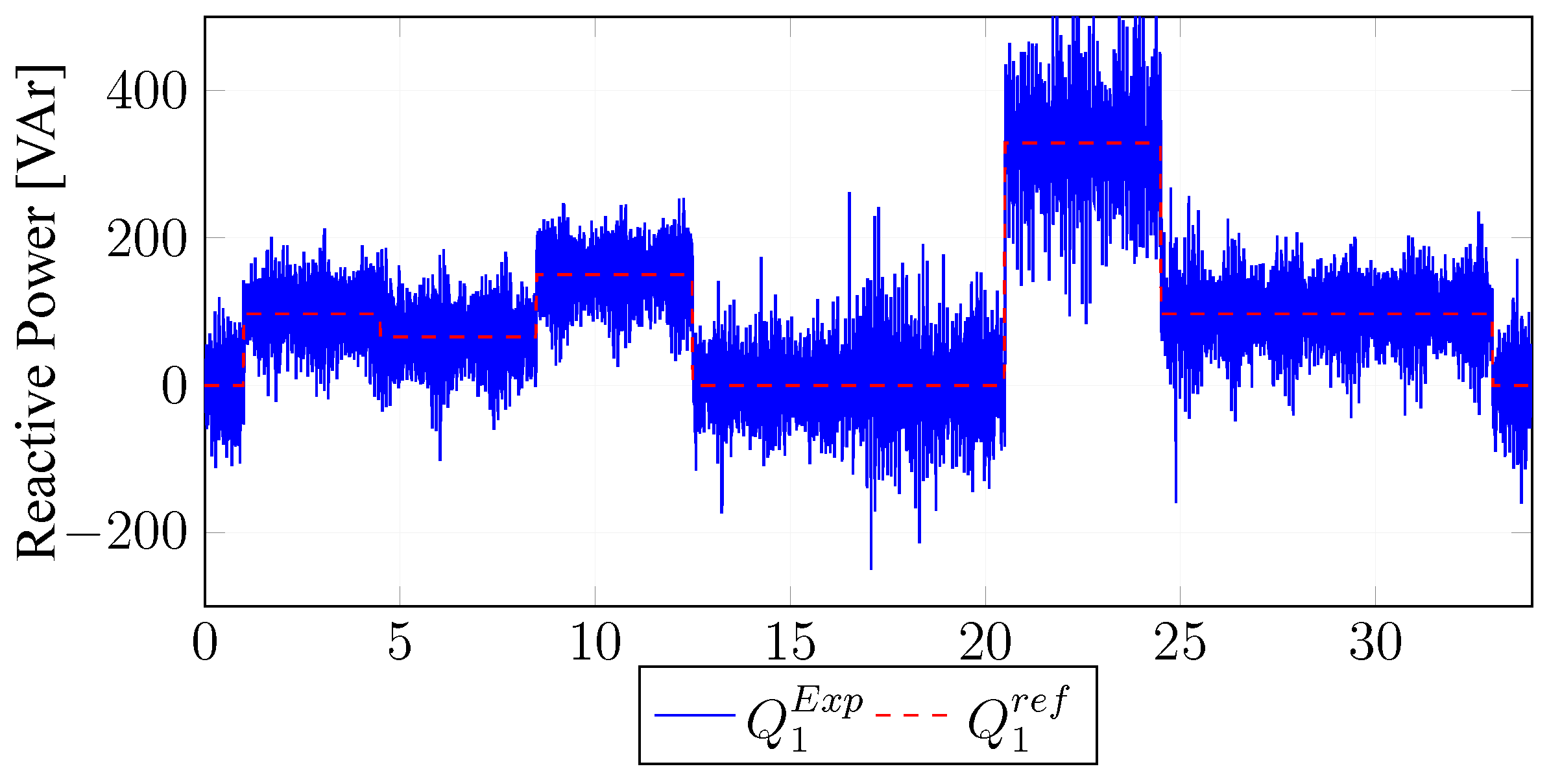
4. Experimental Test Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
Appendix A.1. BDFIM Parameters

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Symbol | Unit | Value |
|---|---|---|---|
| Rated PW and CW voltage | 381 | ||
| Rated PW current | I | 6.56 | |
| Rated CW current | I | 5.6 | |
| Grid frequency | Hz | 50 | |
| PW pole pairs | - | 2 | |
| CW pole pairs | - | 3 | |
| Natural speed | rpm | 600 | |
| Moment of inertia | J | kg·m | 0.154 |
| Rotor friction coefficient | b | - | 0.022 |
| Rotor bar resistance | 26 | ||
| Rotor lower end ring segment resistance | 2.89 | ||
| Rotor upper end ring segment resistance | 14.5 | ||
| Rotor loop 2 resistance | 60.7 | ||
| Rotor loop 3 resistance | 54.9 | ||
| Rotor bar Inductance | H | 1.22 | |
| Rotor lower end-ring segment inductance | H | 0.169 | |
| Rotor upper end-ring segment inductance | H | 0.845 | |
| Rotor bar and loop 2 mutual inductance | H | 2.95 | |
| Rotor bar and loop 3 mutual inductance | H | 2.61 |
| Value | |||
|---|---|---|---|
| PW | CW | Rotor | |
| Resistance () | 4.1 | 6.1 | |
| Self inductance (H) | 2.1299 | 2.2355 | |
| Mutual inductance (mH) | 11.9 | 9 | |
Appendix A.2. Rotor Reference Frame Submatrices
Appendix A.3. Synchronous Reference Frame Submatrices
References
- Brune, C.; Spee, R.; Wallace, A.K. Experimental evaluation of a variable-speed, doubly-fed wind-power generation system. IEEE Trans. Ind. Appl. 1993, 30, 480–487. [Google Scholar] [CrossRef]
- Artigao, E.; Sapena-Bano, A.; Honrubia-Escribano, A.; Martinez-Roman, J.; Puche-Panadero, R.; Gómez-Lázaro, E. Long-Term Operational Data Analysis of an In-Service Wind Turbine DFIG. IEEE Access 2019, 7, 17896–17906. [Google Scholar] [CrossRef]
- Löhdefink, P.; Dietz, A.; Möckel, A. Direct drive concept for heavy-duty traction applications with the brushless doubly-fed induction machine. In Proceedings of the 2018 13th International Conference on Ecological Vehicles and Renewable Energies (EVER), Monte Carlo, Monaco, 10–12 April 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Gabriel, R.; Leonhard, W.; Nordby, C.J. Field-oriented control of a standard ac motor using microprocessors. IEEE Trans. Ind. Appl. 1980, 1, 186–192. [Google Scholar] [CrossRef]
- Spee, R.; Wallace, A.K.; Lauw, H.K. Performance simulation of brushless doubly-fed adjustable speed drives. In Proceedings of the Conference Record of the IEEE Industry Applications Society Annual Meeting, San Diego, CA, USA, 1–5 October 1989; Volume 1, pp. 738–743. [Google Scholar] [CrossRef]
- Wallace, A.K.; Spee, R.; Lauw, H.K. Dynamic modeling of brushless doubly-fed machines. In Proceedings of the Conference Record of the IEEE Industry Applications Society Annual Meeting, San Diego, CA, USA, 1–5 October 1989; Volume 1, pp. 329–334. [Google Scholar] [CrossRef]
- Boger, M.S.; Wallace, A.K.; Spee, R.; Li, R. General pole number model of the brushless doubly-fed machine. IEEE Trans. Ind. Appl. 1995, 31, 1022–1028. [Google Scholar] [CrossRef]
- Li, R.; Wallace, A.; Spee, R. Dynamic simulation of brushless doubly-fed machines. IEEE Trans. Energy Convers. 1991, 6, 445–452. [Google Scholar] [CrossRef]
- Li, R.; Wallace, A.; Spee, R.; Wang, Y. Two-axis model development of cage-rotor brushless doubly-fed machines. IEEE Trans. Energy Convers. 1991, 6, 453–460. [Google Scholar] [CrossRef]
- Boger, M.S. Aspects of Brushless Doubly-Fed Induction Machines. Ph.D. Thesis, St. John’s College, University of Cambridge, Cambridge, UK, 2015. [Google Scholar] [CrossRef]
- Roberts, P.C. Study of Brushless Doubly-Fed (Induction) Machines: Contributions in Machine Analysis, Design and Control. Ph.D. Thesis, St. John’s College, University of Cambridge, Cambridge, UK, 2015. [Google Scholar] [CrossRef]
- Zhou, D.; Spee, R.; Alexander, G.C. Experimental evaluation of a rotor flux oriented control algorithm for brushless doubly-fed machines. IEEE Trans. Power Electron. 1997, 12, 72–78. [Google Scholar] [CrossRef]
- Munoz, A.R.; Lipo, T.A. Complex vector model of the squirrel-cage induction machine including instantaneous rotor bar currents. IEEE Trans. Ind. Appl. 1999, 35, 1332–1340. [Google Scholar] [CrossRef] [Green Version]
- Munoz, A.R.; Lipo, T.A. Dual stator winding induction machine drive. IEEE Trans. Ind. Appl. 2000, 36, 1369–1379. [Google Scholar] [CrossRef]
- Barati, F.; Oraee, H.; Abdi, E.; Shao, S.; McMahon, R. The Brushless Doubly-Fed Machine Vector Model in the rotor flux oriented reference frame. In Proceedings of the 2008 34th Annual Conference of IEEE Industrial Electronics Society, Orlando, FL, USA, 10–13 November 2008; pp. 1415–1420. [Google Scholar] [CrossRef]
- Rodriguez, M. Unified reference frame dq model of the brushless doubly fed machine. IEE Proc.-Electr. Power Appl. 2006, 153, 726–734. [Google Scholar]
- Poza, J.; Oyarbide, E.; Sarasola, I.; Rodriguez, M. Vector control design and experimental evaluation for the brushless doubly fed machine. IET Electr. Power Appl. 2009, 3, 247–256. [Google Scholar] [CrossRef]
- Barati, F.; Oraee, H.; Abdi, E.; McMahon, R. Derivation of a vector model for a Brushless Doubly-Fed Machine with multiple loops per nest. In Proceedings of the 2008 IEEE International Symposium on Industrial Electronics, Vigo, Spain, 4–7 June 2008; pp. 606–611. [Google Scholar] [CrossRef]
- Barati, F.; Oraee, H. Vector model utilization for nested-loop rotor Brushless Doubly-Fed Machine analysis, control and simulation. In Proceedings of the 2010 1st Power Electronic & Drive Systems & Technologies, Tehran, Iran, 17–18 February 2010; pp. 295–301. [Google Scholar] [CrossRef]
- Barati, F.; Shao, S.; Abdi, E.; Oraee, H.; McMahon, R. Synchronous operation control of the Brushless Doubly-Fed Machine. In Proceedings of the 2010 IEEE International Symposium on Industrial Electronics, Bari, Italy, 4–7 July 2010; pp. 1510–1516. [Google Scholar] [CrossRef]
- Barati, F.; McMahon, R.; Shao, S.; Abdi, E.; Oraee, H. Generalized vector control for brushless doubly fed machines with nested-loop rotor. IEEE Trans. Ind. Electron. 2013, 60, 2477–2485. [Google Scholar] [CrossRef]
- Olubamiwa, O.; Gule, N.; Kamper, M. Coupled circuit analysis of the brushlessdoubly fed machine using the windingfunction theory. IET Electr. Power Appl. 2020, 14, 1558–1569. [Google Scholar] [CrossRef]
- Abu-Rub, H.; Iqbal, A.; Guzinski, J. High Performance Control of AC Drives with MATLAB/Simulink Models; John Wiley & Sons: Hoboken, NJ, USA, 2012. [Google Scholar]
- Lobo, F.J.P. Modélisation, Conception et Commande d’Une Machine Asynchrone Sans Balais Doublement Alimentée Pour la Génération à Vitesse Variable. Ph.D. Thesis, Institut National Polytechnique de Grenoble-INPG, Grenoble, France, 2003. [Google Scholar]
- Poza, J.; Oyarbide, E.; Roye, D. New vector control algorithm for brushless doubly-fed machines. In Proceedings of the IEEE 2002 28th Annual Conference of the Industrial Electronics Society IECON 02, Sevilla, Spain, 5–8 November 2002; Volume 2, pp. 1138–1143. [Google Scholar] [CrossRef]












Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hutton, T.; Gule, N. Modeling and Vector Control of a Cage+Nested-Loop Rotor Brushless Doubly Fed Induction Motor. Energies 2022, 15, 5238. https://doi.org/10.3390/en15145238
Hutton T, Gule N. Modeling and Vector Control of a Cage+Nested-Loop Rotor Brushless Doubly Fed Induction Motor. Energies. 2022; 15(14):5238. https://doi.org/10.3390/en15145238
Chicago/Turabian StyleHutton, Tainton, and Nkosinathi Gule. 2022. "Modeling and Vector Control of a Cage+Nested-Loop Rotor Brushless Doubly Fed Induction Motor" Energies 15, no. 14: 5238. https://doi.org/10.3390/en15145238