
Engineering Possibility Studies of a Novel Cylinder-Type FOWT Using Torus Structure with Annular Flow


Abstract
:1. Introduction
1.1. Increasing the Damping Coefficient
1.2. Changing the Natural Frequency of FOWT
1.3. Reducing the Wave Exciting Force or Moment
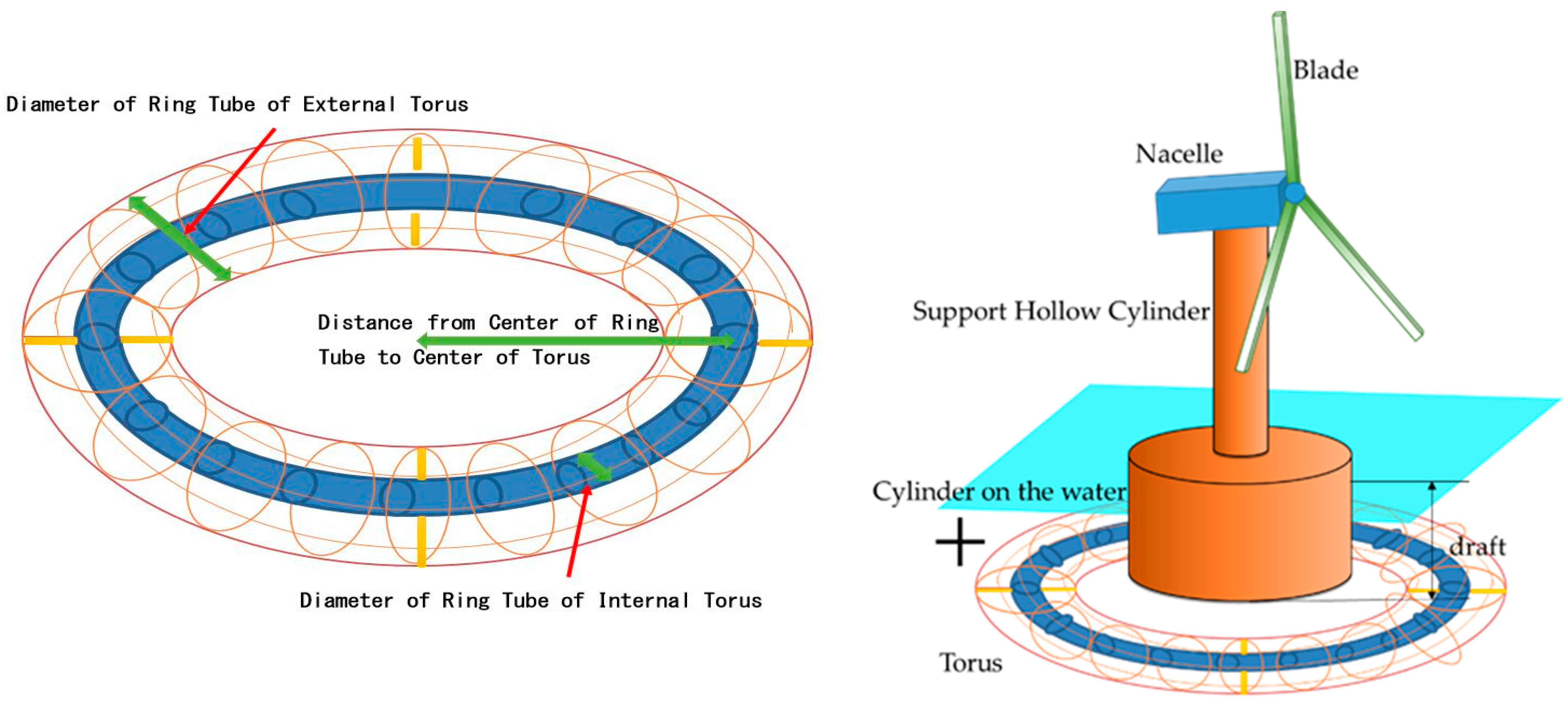
2. Conceptual Design

3. Formulation
3.1. Hydrodynamic Mathematical Model and The Motion Equation
3.2. The Spinning Top
3.3. The Expected Value during Irregular Waves
4. Results and Discussion
4.1. Experimental Verification

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Section | Item | Size (mm) | Weight (g) |
|---|---|---|---|
| Bar | Length | 900 | 46.5 |
| Width | 30 | ||
| Height | 10 | ||
| Disc | Radius | 120 | 14 |
| Radius of central hollow part | 17.5 | ||
| Height | 25 | ||
| Sensor | Length | 15 | 1.7 |
| Width | 10 | ||
| Height | 10 | ||
| Tube | Outer radius | 3.5 | 175 |
| Inner radius | 3 | ||
| Length | 3580 | ||
| Annular water | Length | 2639 | 76 |


| No. | Initial Tilt Angle (°) | ||
|---|---|---|---|
| 1 | 10 | 0 | 1.9220 |
| 2 | 10 | 0.369 | 2.0817 |
| 3 | 10 | 0.737 | 2.1223 |
| 4 | 10 | 1.106 | 2.3373 |

4.2. The Object Parameters
4.3. The Parametric Study of FOWT under the Water Plane
4.3.1. The Presence or Absence of the Torus Structure and the Different Positions Placed in the Vertical Direction
4.3.2. The Radius of the Torus Structure



4.3.3. The Radius of the Internal Annular Flow



4.3.4. The Central Cylinder Radius and Height
4.3.5. The Central Cylinder Wall Thickness
4.4. The Rotational Kinetic Energy
5. Conclusions
- The novel design using annular flow water in the torus structure as the spinning top was confirmed through experiments, and its influence on the hydrodynamic response was mainly by acting on the damping term as a damping force.
- According to the calculation results for the regular wave, it was revealed that, when the volume of annular flow water was rational, a large damping effect could be overwhelmingly confirmed, even for a relatively small angular velocity of annular flow water.
- According to the calculation results for the irregular wave, when the proportion of the moment of inertia Jy of annular flow water was about 5%, and the angular velocity of annular flow water was about 3 rad/s, and a significant oscillating suppression effect could be obtained.
- When a better oscillating suppression effect was obtained, the energy consumed by the annular flow water was not a large proportion of the power generation of the FOWT.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Renewables 2021 Global Status Report. Available online: https://www.ren21.net/wp-content/uploads/2019/05/gsr2021_full_report.pdf (accessed on 1 December 2021).
- Heronemus, W.E. Pollution-Free Energy from the Offshore Winds. In Proceedings of the 8th Annual Conference and Exposition, Marine Technology Society, Washington, DC, USA, 11–13 September 1972. [Google Scholar]
- GWEC. Global Wind Report 2021. Available online: https://gwec.net/wp-content/uploads/2021/03/GWEC-Global-Wind-Report-2021.pdf (accessed on 1 December 2021).
- Nihei, Y.; Iijima, K.; Murai, M.; Ikoma, T. A Comparative Study of Motion Performance of Four Different FOWT Designs in Combined Wind and Wave Loads. In Proceedings of the ASME 2014 33rd International Conference on Ocean, Offshore and Arctic Engineering, San Francisco, CA, USA, 8–13 June 2014. [Google Scholar]
- Cermelli, C.; Roddier, D.; Aubault, A. WindFloat: A Floating Foundation for Offshore Wind Turbines-Part II: Hydrodynamics Analysis. In Proceedings of the ASME 2009 28th International Conference on Ocean, Offshore and Arctic Engineering, Honolulu, HI, USA, 31 May–5 June 2009; Volume 4: Ocean Engineering; Ocean Renewable Energy; Ocean Space Utilization, Parts A and B. pp. 135–143. [Google Scholar] [CrossRef]
- Ikoma, T.; Tan, L.; Moritsu SAida, Y.; Masuda, K. Motion characteristics of a barge-type floating vertical-axis wind turbine with moonpools. Ocean. Eng. 2021, 230, 109006. [Google Scholar] [CrossRef]
- Mazarakos, T.P.; Tsaousis, T.D.; Mavrakos, S.A.; Chatjigeorgiou, I.K. Analytical investigation of tension loads acting on a TLP floating wind turbine. J. Mar. Sci. Eng. 2022, 10, 318. [Google Scholar] [CrossRef]
- Soto, M.G.; Adeli, H. Tuned mass dampers. Arch. Comput. Methods Eng. 2013, 20, 419–431. [Google Scholar] [CrossRef]
- Motora, S. Dynamics of Ships and Offshore Structures; Seizando Shoten: Tokyo, Japan, 1997; ISBN 978-4-425-71103-1. (In Japanese) [Google Scholar]
- Xu, S.; Murai, M.; Wang, X.; Takahashi, K. A novel conceptual design of a dynamically positioned floating wind turbine. Ocean. Eng. 2021, 221, 108528. [Google Scholar] [CrossRef]
- Ren, N.; Gao, Z.; Moan, T.; Wan, L. Long-term performance estimation of the Spar–Torus-Combination (STC) system with different survival modes. Ocean Eng. 2015, 108, 716–728. [Google Scholar] [CrossRef]
- Mitra, A.; Sarkar, S.; Chakraborty, A.; Das, S. Sway vibration control of floating horizontal axis wind turbine by modified spar-torus combination. Ocean. Eng. 2021, 219, 108232. [Google Scholar] [CrossRef]
- Kolemen, E.; Hvasta, M.; Majeski, R.; Maingi, R.; Brooks, A.; Kozub, T. Design of the flowing liquid torus (FLIT). Nucl. Mater. Energy 2019, 19, 524–530. [Google Scholar] [CrossRef]
- Available online: https://www.nasa.gov/ (accessed on 1 December 2021).
- Renchuan, Z.; Guoping, M. The Theory of The Movement of Ships on Waves; Shanghai Jiao Tong University Press: Shanghai, China, 2019; ISBN 978-7-313-20259-8/U. (In Chinese) [Google Scholar]
- Newman, J.N. Marine Hydrodynamics 40th Anniversary Edition; The MIT Press: Cambridge, MA, USA, 2017. [Google Scholar]
- Murai, M.; Ishikawa, K.; Nishimura, R. A Study on an Experiment of Behavior of a SPAR Type Offshore Wind Turbine Considering Rotation of Wind Turbine Blades. In Proceedings of the Oceans2010, Sydney, NSW, Australia, 24–27 May 2010. [Google Scholar]
- Kim, W. On the harmonic oscillations of a rigid body on a free surface. J. Fluid Mech. 1965, 21, 427–451. [Google Scholar] [CrossRef]
- Takagi, M.; Arai, S. Wave-Resistant Theory of Ships and Marine Structures; Seizando Shoten: Tokyo, Japan, 1996; ISBN 4-425-71261-7. (In Japanese) [Google Scholar]
- Wan, Y.; Qu, R.; Dai, Y.; Zhang, X. Research on the applicability of the E spectrum and PM spectrum as the first guess spectrum of SAR wave spectrum inversion. IEEE Access 2020, 8, 169082–169095. [Google Scholar] [CrossRef]
- Abed, K.A.; El-Mallah, A.A. Capacity factor of wind turbines. Energy 1997, 22, 487–491. [Google Scholar] [CrossRef]
- Mahmuddin, F. Rotor blade performance analysis with blade element momentum theory. Energy Procedia 2017, 105, 1123–1129. [Google Scholar] [CrossRef]
- Okulov, V.L.; Sørensen, J.N. Refined Betz limit for rotors with a finite number of blades. Wind Energy 2008, 11, 415–426. [Google Scholar] [CrossRef]
- Kavari, G.; Tahani, M.; Mirhosseini, M. Wind shear effect on aerodynamic performance and energy production of horizontal axis wind turbines with developing blade element momentum theory. J. Clean. Prod. 2019, 219, 368–376. [Google Scholar] [CrossRef]
- The Japan Society of Naval Architects and Ocean Engineers (JASNAOE). Practical Series—Fluid Dynamics of Floating Bodies— <Part 1> Numerical Calculation Method of Dynamic Motion in Waves; Seizando Shoten: Tokyo, Japan, 2003; ISBN 4425713214. (In Japanese) [Google Scholar]
- Hess, J.L.; Smith, A.M.O. Calculation of non-lifting potential flow about arbitrary three-dimensional bodies. J. Ship Res. 1964, 8, 22–44. [Google Scholar] [CrossRef]
- Available online: https://www.mathworks.com/help/ja_JP/doc_download/download_R2016b.html (accessed on 1 December 2021).
- Superfluidity. Available online: https://en.wikipedia.org/wiki/Superfluidity (accessed on 1 December 2021).
- Loisy, A.; Eggers, J.; Liverpool, T.B. Active suspensions have nonmonotonic flow curves and multiple mechanical equilibria. Phys. Rev. Lett. 2018, 121, 018001. [Google Scholar] [CrossRef] [PubMed] [Green Version]








| Parameter | Units (m) | Parameter | Units (m) |
|---|---|---|---|
| Single blade length | 100 | Nacelle width | 10 |
| Single blade width | 1 | Nacelle height | 8 |
| Single blade wall thickness | 0.2 | Nacelle wall thickness | 0.8 |
| Support hollow cylinder radius | 5 | Radius of cylinder in water | 30 |
| Support hollow cylinder length | 110 | Height of cylinder in water | 45 |
| Support hollow cylinder wall thickness | 0.3 | Wall thickness of cylinder in water | 0.15 |
| Nacelle (hollow but thick wall) length | 30 | Ballast height | 12 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, X.; Murai, M. Engineering Possibility Studies of a Novel Cylinder-Type FOWT Using Torus Structure with Annular Flow. Energies 2022, 15, 4919. https://doi.org/10.3390/en15134919
Liu X, Murai M. Engineering Possibility Studies of a Novel Cylinder-Type FOWT Using Torus Structure with Annular Flow. Energies. 2022; 15(13):4919. https://doi.org/10.3390/en15134919
Chicago/Turabian StyleLiu, Xiaolei, and Motohiko Murai. 2022. "Engineering Possibility Studies of a Novel Cylinder-Type FOWT Using Torus Structure with Annular Flow" Energies 15, no. 13: 4919. https://doi.org/10.3390/en15134919