
Time-Averaged Wind Turbine Wake Flow Field Prediction Using Autoencoder Convolutional Neural Networks

 , ,
, ,
Abstract
:1. Introduction
2. Numerical Methods
2.1. Governing Equations
2.2. Numerics
2.3. Actuator Surface Model
3. Computational Details of SWiFT Site Simulation
4. Validation of the Computational Model
5. CNN Autoencoder Model
6. Results and Discussion
7. Conclusions
- (1)
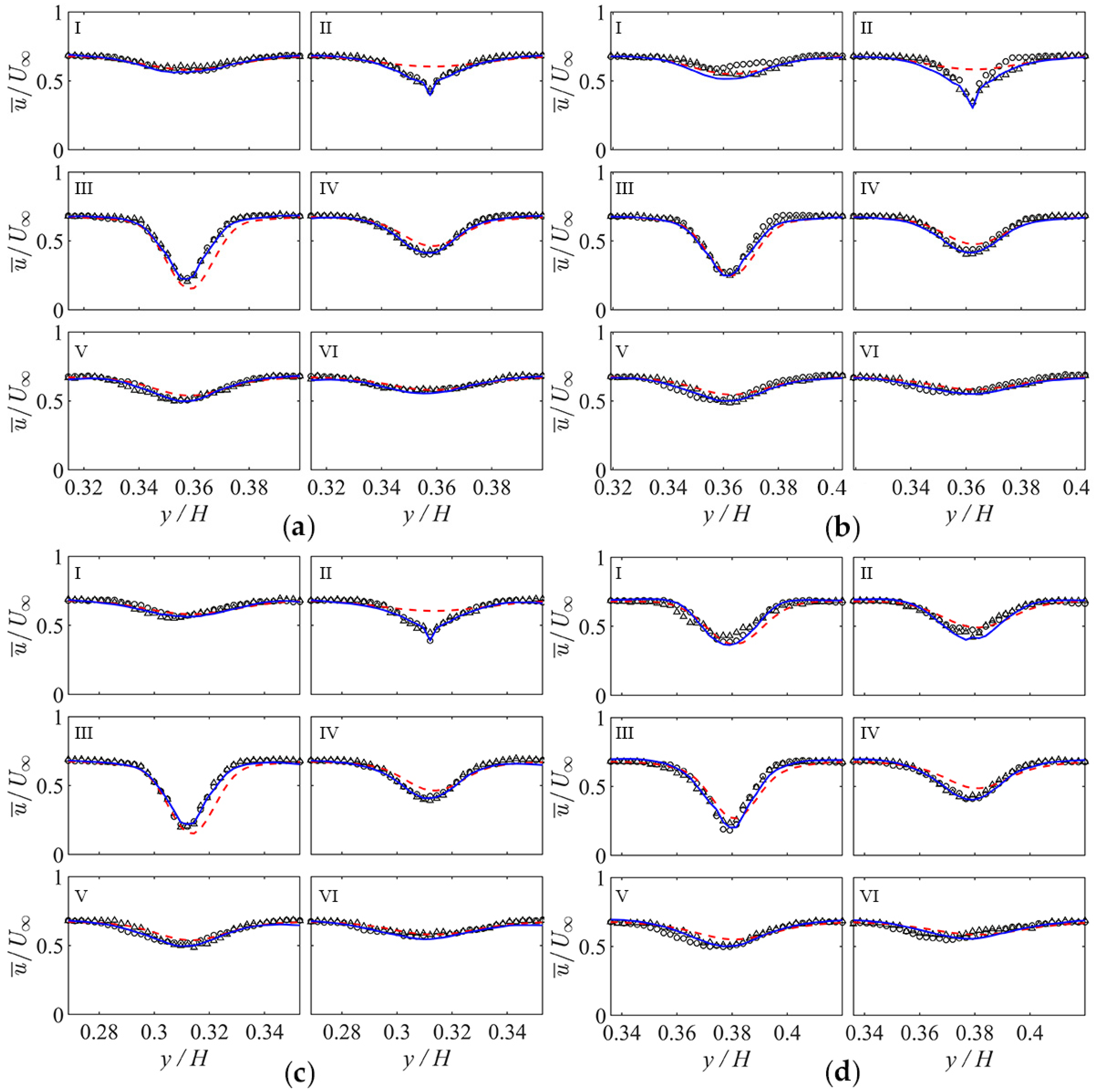
- The trained CNN can successfully predict the time-averaged flow field around individual turbines, while the data augmentation technique can effectively address the location sensitivity of the trained CNN. The predicted flow field clearly reflects the main features of the turbine wakes obtained from LES. The velocity profiles drawn from CNN predictions agree well with LES time-averaged results and the overall relative errors are no more than 3%. The presented model has a good generality in different wind speeds. However, wake overlapping will affect the accuracy of the predictions. Different turbine distances lead to different wake-turbine interaction effects and, thus, the flow structure near the turbine varies significantly. Since the CNN model is only trained using one turbine wake interaction case, the generality in different wake interaction cases is approvable. In a future study, we will consider more wake overlapping cases in the training dataset to enable better flow field predictions.
- (2)
- The computational cost associated with the LES to generate the time-average flow field for each case was over CPU hours, whereas the CNN required nearly 50 s to reconstruct the same flow field. Considering the training cost of about 10 CPU hours and the cost of LES to produce instantaneous flow field (i.e., CPU hours) for the inputs of the CNN, the total cost of the proposed CNN is 88% less than that of the LES. Therefore, the proposed CNN algorithms could enable reliable predictions of the wake flow field at a fraction of the cost required by the LES.
- (3)
- The CNN predictions for the aerodynamic power productions were in good agreement with the LES results, except for the turbine located in the near wake of the upwind turbine owing to an underestimation of the velocity deficit within the wake. Overall, the comparisons between the LES results and CNN predictions of the SWiFT wind turbines demonstrate the potential of the developed CNN autoencoder for predicting time-averaged flow fields and the power production of wind turbines while being several orders of magnitude less computationally expensive than high-fidelity numerical simulations.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Thomsen, K.; Sørensen, P. Fatigue loads for wind turbines operating in wakes. J. Wind Eng. Ind. Aerodyn. 1999, 80, 121–136. [Google Scholar] [CrossRef]
- El-Asha, S.; Zhan, L.; Iungo, G.V. Quantification of power losses due to wind turbine wake interactions through SCADA, meteorological and wind LiDAR data. Wind Energy 2017, 20, 1823–1839. [Google Scholar] [CrossRef]
- Blondel, F.; Cathelain, M. An alternative form of the super-Gaussian wind turbine wake model. Wind Energy Sci. 2020, 5, 1225–1236. [Google Scholar] [CrossRef]
- Ge, M.; Wu, Y.; Liu, Y.; Li, Q. A two-dimensional model based on the expansion of physical wake boundary for wind-turbine wakes. Appl. Energy 2018, 233–234, 975–984. [Google Scholar] [CrossRef]
- Regodeseves, P.G.; Morros, C.S. Unsteady numerical investigation of the full geometry of a horizontal axis wind turbine: Flow through the rotor and wake. Energy 2020, 202, 117674. [Google Scholar] [CrossRef]
- Hornshøj-Møller, S.D.; Nielsen, P.D.; Forooghi, P.; Abkar, M. Quantifying structural uncertainties in Reynolds-averaged Navier–Stokes simulations of wind turbine wakes. Renew. Energy 2020, 164, 1550–1558. [Google Scholar] [CrossRef]
- Jensen, N.O. A Note on Wind Generator Interaction; Risø National Laboratory: Roskilde, Denmark, 1983. [Google Scholar]
- Hamedi, R.; Javaheri, A.; Dehghan, O.; Torabi, F. A semi-analytical model for velocity profile at wind turbine wake using blade element momentum. Energy Equip. Syst. 2015, 3, 13–24. [Google Scholar] [CrossRef]
- Bastankhah, M.; Porté-Agel, F. A new analytical model for wind-turbine wakes. Renew. Energy 2014, 70, 116–123. [Google Scholar] [CrossRef]
- Gao, X.; Yang, H.; Lu, L. Optimization of wind turbine layout position in a wind farm using a newly-developed two-dimensional wake model. Appl. Energy 2016, 174, 192–200. [Google Scholar] [CrossRef]
- Keane, A.; Aguirre, P.E.O.; Ferchland, H.; Clive, P.; Gallacher, D. An analytical model for a full wind turbine wake. J. Phys. Conf. Ser. 2016, 753, 032039. [Google Scholar] [CrossRef]
- Keane, A. Advancement of an analytical double-Gaussian full wind turbine wake model. Renew. Energy 2021, 171, 687–708. [Google Scholar] [CrossRef]
- Sun, H.; Yang, H. Study on an innovative three-dimensional wind turbine wake model. Appl. Energy 2018, 226, 483–493. [Google Scholar] [CrossRef]
- Sun, H.; Yang, H. Numerical investigation of the average wind speed of a single wind turbine and development of a novel three-dimensional multiple wind turbine wake model. Renew. Energy 2019, 147, 192–203. [Google Scholar] [CrossRef]
- Ishihara, T.; Qian, G.-W. A new Gaussian-based analytical wake model for wind turbines considering ambient turbulence intensities and thrust coefficient effects. J. Wind Eng. Ind. Aerodyn. 2018, 177, 275–292. [Google Scholar] [CrossRef]
- Qian, G.-W.; Ishihara, T. A New Analytical Wake Model for Yawed Wind Turbines. Energies 2018, 11, 665. [Google Scholar] [CrossRef] [Green Version]
- Cheng, Y.; Zhang, M.; Zhang, Z.; Xu, J. A new analytical model for wind turbine wakes based on Monin-Obukhov similarity theory. Appl. Energy 2019, 239, 96–106. [Google Scholar] [CrossRef]
- Lin, M.; Porté-Agel, F. Large-Eddy Simulation of Yawed Wind-Turbine Wakes: Comparisons with Wind Tunnel Measurements and Analytical Wake Models. Energies 2019, 12, 4574. [Google Scholar] [CrossRef] [Green Version]
- Porté-Agel, F.; Bastankhah, M.; Shamsoddin, S. Wind-Turbine and Wind-Farm Flows: A Review. Bound.-Layer Meteorol. 2019, 174, 1–59. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Fuertes, F.C.; Markfort, C.D.; Porté-Agel, F. Wind Turbine Wake Characterization with Nacelle-Mounted Wind Lidars for Analytical Wake Model Validation. Remote Sens. 2018, 10, 668. [Google Scholar] [CrossRef] [Green Version]
- Archer, C.L.; Vasel-Be-Hagh, A.; Yan, C.; Wu, S.; Pan, Y.; Brodie, J.F.; Maguire, A.E. Review and evaluation of wake loss models for wind energy applications. Appl. Energy 2018, 226, 1187–1207. [Google Scholar] [CrossRef]
- Foti, D.; Yang, X.; Guala, M.; Sotiropoulos, F. Wake meandering statistics of a model wind turbine: Insights gained by large eddy simulations. Phys. Rev. Fluids 2016, 1, 044407. [Google Scholar] [CrossRef]
- Foti, D.; Yang, X.; Sotiropoulos, F. Similarity of wake meandering for different wind turbine designs for different scales. J. Fluid Mech. 2018, 842, 5–25. [Google Scholar] [CrossRef]
- Foti, D.; Yang, X.; Campagnolo, F.; Maniaci, D.; Sotiropoulos, F. Wake meandering of a model wind turbine operating in two different regimes. Phys. Rev. Fluids 2018, 3, 054607. [Google Scholar] [CrossRef]
- Xie, S.; Archer, C.L. A Numerical Study of Wind-Turbine Wakes for Three Atmospheric Stability Conditions. Bound.-Layer Meteorol. 2017, 165, 87–112. [Google Scholar] [CrossRef]
- Yang, X.; Pakula, M.; Sotiropoulos, F. Large-eddy simulation of a utility-scale wind farm in complex terrain. Appl. Energy 2018, 229, 767–777. [Google Scholar] [CrossRef]
- Liu, Z.; Lu, S.; Ishihara, T. Large eddy simulations of wind turbine wakes in typical complex topographies. Wind Energy 2021, 24, 857–886. [Google Scholar] [CrossRef]
- Qian, G.-W.; Ishihara, T. Numerical study of wind turbine wakes over escarpments by a modified delayed detached eddy simulation. J. Wind Eng. Ind. Aerodyn. 2019, 191, 41–53. [Google Scholar] [CrossRef]
- Foti, D.; Yang, X.; Shen, L.; Sotiropoulos, F. Effect of wind turbine nacelle on turbine wake dynamics in large wind farms. J. Fluid Mech. 2019, 869, 1–26. [Google Scholar] [CrossRef]
- Santoni, C.; Carrasquillo, K.; Arenas-Navarro, I.; Leonardi, S. Effect of tower and nacelle on the flow past a wind turbine. Wind Energy 2017, 20, 1927–1939. [Google Scholar] [CrossRef]
- Sedaghatizadeh, N.; Arjomandi, M.; Kelso, R.; Cazzolato, B.; Ghayesh, M.H. Modelling of wind turbine wake using large eddy simulation. Renew. Energy 2018, 115, 1166–1176. [Google Scholar] [CrossRef]
- Japar, F.; Mathew, S.; Narayanaswamy, B.; Lim, C.M.; Hazra, J. Estimating the wake losses in large wind farms: A machine learning approach. In Proceedings of the Innovative Smart Grid Technologies Conference 2014, Washington, DC, USA, 19–22 February 2014; pp. 1–5. [Google Scholar] [CrossRef]
- Sun, H.; Qiu, C.; Lu, L.; Gao, X.; Chen, J.; Yang, H. Wind turbine power modelling and optimization using artificial neural network with wind field experimental data. Appl. Energy 2020, 280, 115880. [Google Scholar] [CrossRef]
- Wilson, B.; Wakes, S.; Mayo, M. Surrogate modeling a computational fluid dynamics-based wind turbine wake simulation using machine learning. In Proceedings of the 2017 IEEE Symposium Series on Computational Intelligence (SSCI), Honolulu, HI, USA, 27 November–1 December 2017; pp. 1–8. [Google Scholar] [CrossRef] [Green Version]
- Ti, Z.; Deng, X.W.; Yang, H. Wake modeling of wind turbines using machine learning. Appl. Energy 2019, 257, 114025. [Google Scholar] [CrossRef]
- Ti, Z.; Deng, X.W.; Zhang, M. Artificial Neural Networks based wake model for power prediction of wind farm. Renew. Energy 2021, 172, 618–631. [Google Scholar] [CrossRef]
- Yang, X. Towards the development of a wake meandering model based on neural networks. J. Phys. Conf. Ser. 2020, 1618, 062026. [Google Scholar] [CrossRef]
- Zhang, J.; Zhao, X. Machine-Learning-Based Surrogate Modeling of Aerodynamic Flow Around Distributed Structures. AIAA J. 2021, 59, 868–879. [Google Scholar] [CrossRef]
- King, R.N.; Adcock, C.; Annoni, J.; Dykes, K. Data-Driven Machine Learning for Wind Plant Flow Modeling. J. Phys. Conf. Ser. 2018, 1037, 072004. [Google Scholar] [CrossRef]
- Ali, N.; Calaf, M.; Cal, R.B. Clustering sparse sensor placement identification and deep learning based forecasting for wind turbine wakes. J. Renew. Sustain. Energy 2021, 13, 023307. [Google Scholar] [CrossRef]
- Renganathan, S.A.; Maulik, R.; Letizia, S.; Iungo, G.V. Data-Driven Wind Turbine Wake Modeling via Probabilistic Machine Learning. 2021. Available online: http://arxiv.org/abs/2109.02411 (accessed on 9 October 2021).
- Aird, J.A.; Quon, E.W.; Barthelmie, R.J.; Debnath, M.; Doubrawa, P.; Pryor, S.C. Region-Based Convolutional Neural Network for Wind Turbine Wake Characterization in Complex Terrain. Remote Sens. 2021, 13, 4438. [Google Scholar] [CrossRef]
- Khosronejad, A.; Sotiropoulos, F. A short note on the simulation of turbulent stratified flow and mobile bed interaction using the continuum coupled flow and morphodynamics model. Environ. Fluid Mech. 2020, 20, 1511–1525. [Google Scholar] [CrossRef]
- Germano, M.; Piomelli, U.; Moin, P.; Cabot, W.H. A dynamic subgrid-scale eddy viscosity model. Phys. Fluids A Fluid Dyn. 1991, 3, 1760–1765. [Google Scholar] [CrossRef] [Green Version]
- Gilmanov, A.; Sotiropoulos, F. A hybrid Cartesian/immersed boundary method for simulating flows with 3D, geometrically complex, moving bodies. J. Comput. Phys. 2005, 207, 457–492. [Google Scholar] [CrossRef]
- Kang, S.; Lightbody, A.; Hill, C.; Sotiropoulos, F. High-resolution numerical simulation of turbulence in natural waterways. Adv. Water Resour. 2011, 34, 98–113. [Google Scholar] [CrossRef]
- Yang, X.; Sotiropoulos, F. A new class of actuator surface models for wind turbines. Wind Energy 2018, 21, 285–302. [Google Scholar] [CrossRef] [Green Version]
- Yang, X.; Zhang, X.; Li, Z.; He, G.-W. A smoothing technique for discrete delta functions with application to immersed boundary method in moving boundary simulations. J. Comput. Phys. 2009, 228, 7821–7836. [Google Scholar] [CrossRef]
- Berg, J.; Bryant, J.; LeBlanc, B.; Maniaci, D.C.; Naughton, B.; Paquette, J.A.; Resor, B.R.; White, J.; Kroeker, D. Scaled Wind Farm Technology Facility Overview. In Proceedings of the 32nd ASME Wind Energy Symposium, National Harbor, MD, USA, 13–17 January 2014. [Google Scholar] [CrossRef] [Green Version]
- Kelley, C.L.; Ennis, B.L. SWiFT Site Atmospheric Characterization; Technical Report; Sandia National Lab.: Albuquerque, NM, USA, 2016.
- Herges, T.G.; Keyantuo, P. Robust Lidar Data Processing and Quality Control Methods Developed for the SWiFT Wake Steering Experiment. J. Phys. Conf. Ser. 2019, 1256, 012005. [Google Scholar] [CrossRef]
- LeCun, Y.; Boser, B.; Denker, J.S.; Henderson, D.; Howard, R.E.; Hubbard, W.; Jackel, L.D. Backpropagation Applied to Handwritten Zip Code Recognition. Neural Comput. 1989, 1, 541–551. [Google Scholar] [CrossRef]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. ImageNet Classification with Deep Convolutional Neural Networks. Commun. ACM 2012, 25, 1097–1105. [Google Scholar] [CrossRef]
- Guo, X.; Li, W.; Iorio, F. Convolutional Neural Networks for Steady Flow Approximation. In Proceedings of the 22nd ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, San Francisco, CA, USA, 13–17 August 2016; pp. 481–490. [Google Scholar] [CrossRef]
- Sekar, V.; Jiang, Q.; Shu, C.; Khoo, B.C. Fast flow field prediction over airfoils using deep learning approach. Phys. Fluids 2019, 31, 057103. [Google Scholar] [CrossRef]
- Morimoto, M.; Fukami, K.; Zhang, K.; Nair, A.G.; Fukagata, K. Convolutional Neural Networks for Fluid Flow Analysis: Toward Effective Metamodeling and Low-Dimensionalization. 2021. Available online: http://arxiv.org/abs/2101.02535 (accessed on 20 February 2021).
- Nakamura, T.; Fukami, K.; Hasegawa, K.; Nabae, Y.; Fukagata, K. Convolutional neural network and long short-term memory based reduced order surrogate for minimal turbulent channel flow. Phys. Fluids 2021, 33, 025116. [Google Scholar] [CrossRef]
- Glorot, X.; Bordes, A.; Bengio, Y. Deep sparse rectifier neural networks. In Proceedings of the Fourteenth International Conference on Artificial Intelligence and Statistics, Fort Lauderdale, FL, USA, 11–13 April 2011; pp. 315–323. [Google Scholar]
- Hecht-Nielsen, R. Theory of the backpropagation neural network. In Neural Networks for Perception; Academic Press: Cambridge, MA, USA, 1992; pp. 65–93. [Google Scholar]
- Khosronejad, A.; Flora, K.; Kang, S. Effect of Inlet Turbulent Boundary Conditions on Scour Predictions of Coupled LES and Morphodynamics in a Field-Scale River: Bankfull Flow Conditions. J. Hydraul. Eng. 2020, 146, 04020020. [Google Scholar] [CrossRef]
- Voutsinas, S.; Rados, K.; Zervos, A. On the analysis of wake effects in wind parks. Wind Eng. 1990, 14, 204–219. [Google Scholar]
- Ebtehaj, I.; Bonakdari, H. A comparative study of extreme learning machines and support vector machines in prediction of sediment transport in open channels. Int. J. Eng. Trans. B Appl. 2016, 29, 1499–1506. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 37 | |||
| 24.9 | 0.177 | ||
| 80 | 0.089 | ||
| (m s−1) | 7, 9, 11, 13, 15 | 0.089–1.481 | |
| (s) | |||
| (m) | 27 |
| Wind Direction | Turbine | R2 | MAE | RMSE | MARE |
|---|---|---|---|---|---|
| NE | 0.99 | 0.0055 | 0.0097 | 0.01 | |
| 0.99 | 0.0066 | 0.0111 | 0.01 | ||
| 0.99 | 0.0045 | 0.0080 | 0.01 | ||
| S | 0.98 | 0.0083 | 0.0147 | 0.02 | |
| 0.98 | 0.0080 | 0.0162 | 0.01 | ||
| 0.97 | 0.0106 | 0.0149 | 0.02 | ||
| SW | 0.97 | 0.0102 | 0.0095 | 0.02 | |
| 0.98 | 0.0074 | 0.0143 | 0.01 | ||
| 0.92 | 0.0166 | 0.0201 | 0.03 | ||
| W | 0.95 | 0.0140 | 0.0256 | 0.03 | |
| 0.95 | 0.0138 | 0.0267 | 0.03 | ||
| 0.96 | 0.0116 | 0.0181 | 0.02 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Z.; Santoni, C.; Herges, T.; Sotiropoulos, F.; Khosronejad, A. Time-Averaged Wind Turbine Wake Flow Field Prediction Using Autoencoder Convolutional Neural Networks. Energies 2022, 15, 41. https://doi.org/10.3390/en15010041
Zhang Z, Santoni C, Herges T, Sotiropoulos F, Khosronejad A. Time-Averaged Wind Turbine Wake Flow Field Prediction Using Autoencoder Convolutional Neural Networks. Energies. 2022; 15(1):41. https://doi.org/10.3390/en15010041
Chicago/Turabian StyleZhang, Zexia, Christian Santoni, Thomas Herges, Fotis Sotiropoulos, and Ali Khosronejad. 2022. "Time-Averaged Wind Turbine Wake Flow Field Prediction Using Autoencoder Convolutional Neural Networks" Energies 15, no. 1: 41. https://doi.org/10.3390/en15010041