1. Introduction
The demand for renewable energy is increasing exponentially due to global efforts to decelerate climate change. Wind energy is the fastest-growing renewable source. The worldwide installed wind capacity reached
by 2020 [
1]. At present, utility-scale turbines, greater than 1 MW, are being widely used to harness wind energy. However, these turbines are installed far from urban areas increasing the cost of electric power transmission. On the other hand, distributed turbines (less than
), can be installed near farms, homes, public facilities, and businesses, making the distributed grid more reliable and stable [
2].
In a conventional variable-speed turbine, power from the turbine rotor is transmitted to the high-speed doubly-fed induction generator (DFIG) through a step-up multi-stage fixed-ratio gearbox. To maximize the power, the current and frequency of the DFIG rotor are controlled by a power-electronics [
3]. Unsteady wind exerts an impact load on the gearbox which diminishes the life of the component [
4], thereby decreasing the annual energy production, and increasing the maintenance cost. All these factors combined lead to a higher Levelized cost of electricity (LCOE). At present, community wind turbines are experiencing slow growth due to higher LCOE than utility-scale turbines because of poor reliability, high cost of the drive train, and expensive power electronics.
To increase the reliability of the drivetrain, methods such as direct drive, and mechanical Continuous Variable Transmission (CVT) have been studied [
5]. In a direct-drive transmission, the turbines are bulky and require full-scale power electronics, greatly adding to the overall cost. It has been shown that mechanical CVT turbines are more efficient and show better dynamic behaviors to turbulent wind conditions, and produce high-quality electrical energy [
6,
7]. However, mechanical CVTs are heavier and have limitations on power and gear ratios.
Alternatively, a hydrostatic transmission (HST) is a continuous variable transmission, which is a light, reliable, efficient, and cost-competitive alternative for a wind turbine drivetrain. Due to its high power density, hydraulics has been used in heavy-duty applications such as agricultural and construction equipment. In an HST wind turbine, the slight compressibility of the hydraulic fluids absorbs the transient loads and protects the mechanical components, increasing their functional life. With an installation of a hydraulic accumulator, HST can also store short-term energy [
8]. The HST decouples the synchronous generator from the rotor speed, allowing it to operate at synchronous speed, eliminating the need for a power-electronics, substantially decreasing the cost of the drive train [
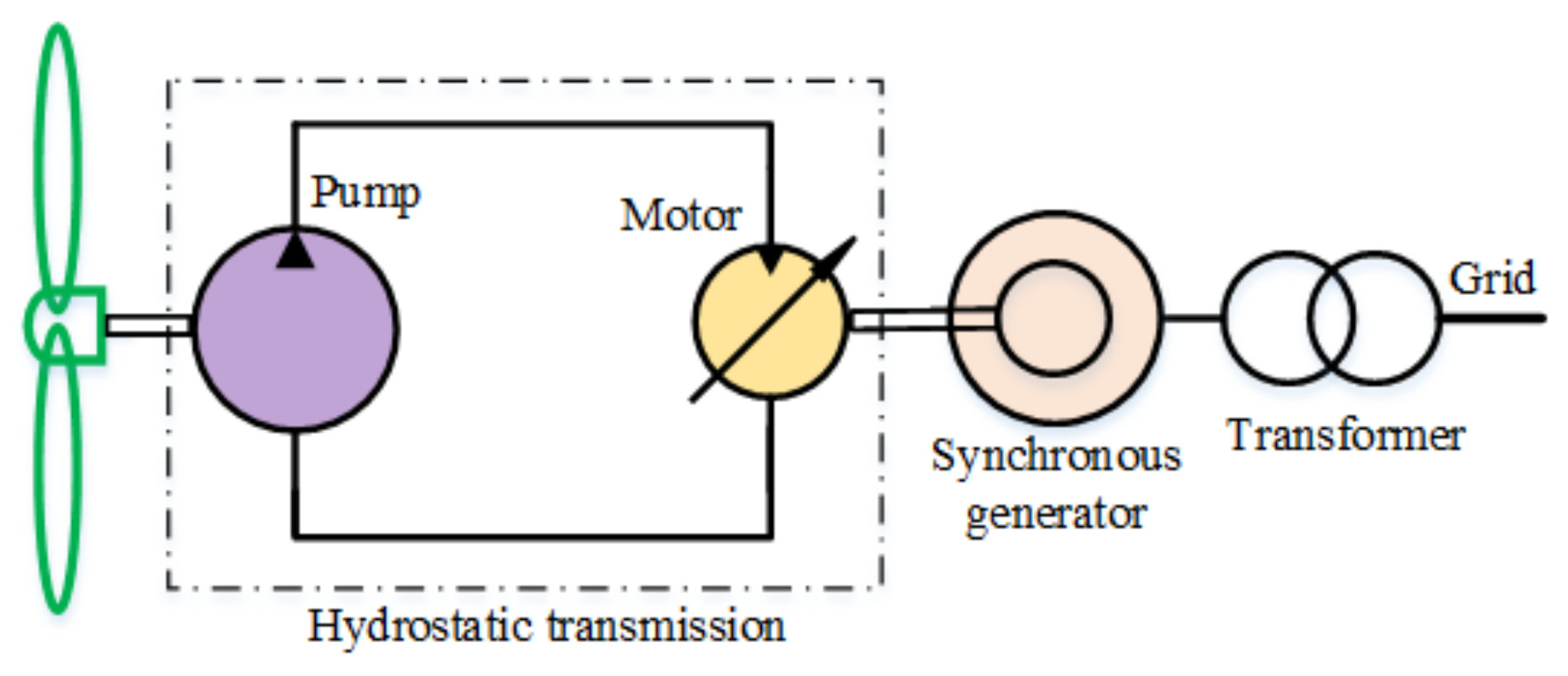
9]. A schematic representation of the proposed HST drivetrain is shown in
Figure 1.
Due to the compelling advantages of the HST wind turbine, the feasibility of using HST drive trains in utility-scale (>1 MW) turbines, has been extensively investigated [
10,
11]. Researchers at RWTH Aachen, have demonstrated a 1 MW turbine with multiple pumps and motors and a switching strategy to improve efficiency [
12]. Simulation studies have been shown as an optimal control method to improve the power output of utility-scale HST wind turbines in low wind regimes [
13]. Mitsubishi heavy industries and Artemis have developed 2.3 and 7 MW hydrostatic wind turbines with variable displacement and Digital Displacement Technology (DDT) pumps and motors [
14,
15]. Simulation studies demonstrate that digital hydrostatic drive trains can improve reliability and energy production [
16]. Although these technologies show promising results in utility wind turbines, translating them to community wind turbines poses challenges in complexity, cost, and availability of the components.
In previous simulation work [
9], we demonstrated the design and control of an HST wind turbine and the practicality of using an HST turbine with a synchronous generator coupled directly to the grid. In the current work, the behavior of an HST turbine under different wind disturbances is experimentally evaluated. For this study, a commonly available, single pump and motor configuration is used for the community wind as shown in
Figure 1. An analytical model of the HST is developed and a pressure control framework to maximize the power capture is proposed. Hardware-in-the-loop (HIL) simulation is used to emulate the real wind turbine conditions on the power regenerative dynamometer to investigate the performance of the system. The performance of the turbine and controller is evaluated under transient and steady-state conditions. The efficiency of the transmission is measured and compared with the gearbox turbine.
To the best of our knowledge, this is the first time that a validated model and controlled experiments have been used to analyze the performance of this class of wind turbines. We suggest that understanding the dynamics and performance of the HST under varying wind conditions is critical to improving the performance of the components, fluids, and HST wind turbine.
Dynamical models for the HST and the control algorithm for a wind turbine are described in
Section 2 and
Section 3. The HIL experimental setup and the performance of the HST turbine subject to varying wind disturbances are discussed in
Section 4 and
Section 5. The performance of the HST is compared with a gearbox turbine in
Section 6. Concluding remarks and future work are presented in
Section 7.
2. Dynamic Model of the HST
In an HST, a pump drives a motor. With at least one variable displacement unit the system became a CVT. A fixed displacement pump and a variable displacement motor configuration are selected for the HST as shown in
Figure 1. The turbine rotor rotates at a low speed, so a low-speed, high-displacement pump is required for the HST. Due to the unavailability of such pumps, a fixed-displacement, low-speed, and high-displacement hydraulic motor is used in reverse as a pump in our design. A variable-displacement, high-speed commercially available motor is selected to complement the pump. The rotor drives the hydraulic pump and produces a flow,
Q, at pressure,
. The dynamic equation for rotor speed,
, is
where
and
are the inertia and viscous damping coefficient of the rotor.
, is the aerodynamic torque, which is a function of wind speed,
, rotor speed,
, and pitch angle of the blade,
.
is the pump displacement.
The pump flow is transmitted through a hydraulic line and drives the variable displacement motor. The short hydraulic line can be modeled as a fluid capacitance. The pressure in the control volume changes due to the difference between fluid entering and exiting the control volume. The dynamics of the line pressure,
is given by
where
V and
B are the fluid volumes and bulk modulus.
is the full displacement of the motor and
is the normalized swash plate angle. The combined leakage loss from the hydraulic pump and motor, denoted by
, is a linear function of the pressure and the leakage coefficient of the HST.
The hydraulic motor drives the synchronous generator and allows it to rotate at a constant speed. The motor swash plate angle is controlled by an electro-hydraulic valve. The dynamics of the swash plate position,
, with respect to the applied voltage,
can be modeled as a first-order system. The gain and time constant are determined from the experiment and the transfer function is given by
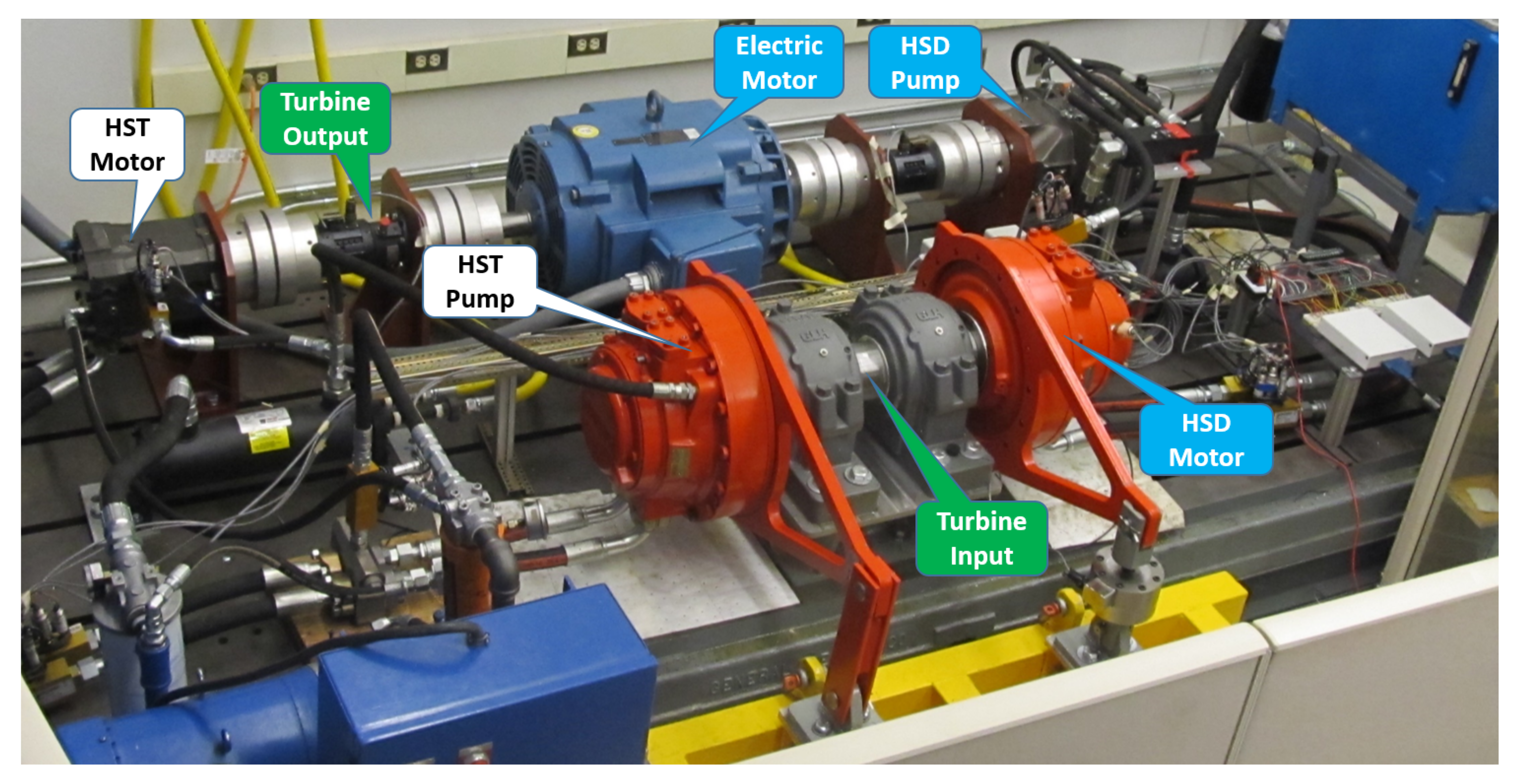
To measure the performance of the HST wind turbine, a
power regenerative wind turbine dynamometer has been developed at the University of Minnesota as shown in
Figure 2 [
17]. Unknown parameters in the HST dynamics equations are experimentally determined from the dynamometer and shown in
Table 1 [
18].
3. HST Wind Turbine Control
Wind turbines operate in four control regions [
19]. Our focus is in region 2, where the wind speed is between the cut-in speed and the rated speed and the control objective is the maximization of the power generation.
The aerodynamics efficiency of a wind turbine is measured by power coefficient,
, the ratio between rotor power and wind power.
is a function of wind speed,
, pitch angle and rotor speed,
. According to Betz’s law, the maximum aerodynamic efficiency of a wind turbine rotor is
[
20,
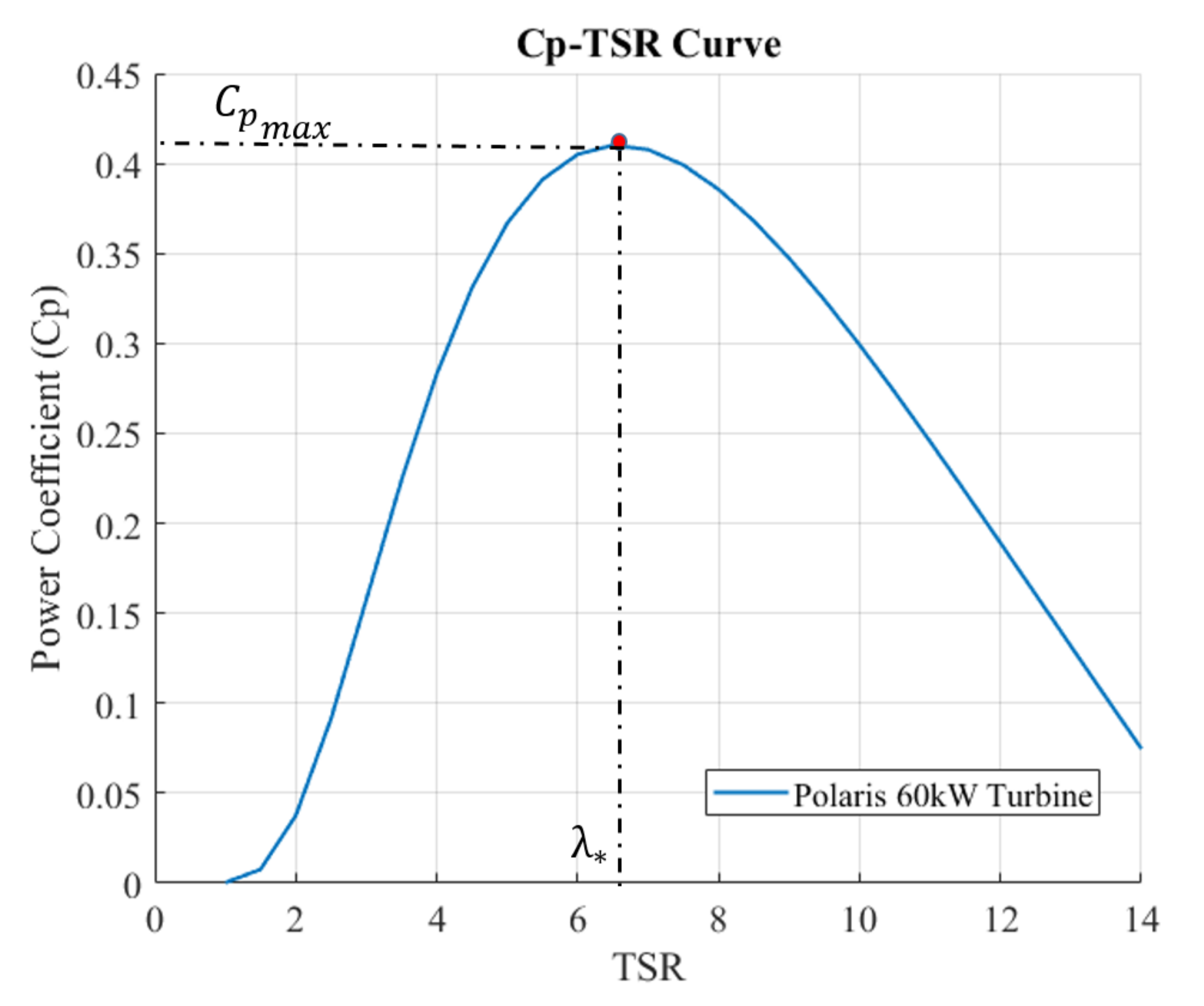
21]. In region 2, the blade pitch is fixed, and the control goal is to maximize the power capture. At a fixed pitch angle, the
of a turbine as a function of non-dimensional Tip Speed Ratio (TSR),
. The TSR is defined as the ratio of tip speed velocity to wind speed:
The desired maximum power coefficient,
, is achieved by operating the turbine at the optimal TSR,
, which is realized by controlling the rotor speed,
.
One approach, that might be used, is to control the rotor speed,
, using the swash plate angle,
, to operate the turbine at the optimal tip speed ratio [
22]. However, this approach requires measuring wind speed, a difficult task in practice. Instead of controlling rotor speed directly, the load torque on the rotor shaft is controlled as described below.
In a conventional turbine, the load torque is computed by the
law and applied to the generator through power electronics. The controller always brings the turbine to the optimum point [
23]. However, in the HST drive train, a synchronous generator is used and the rotor speed is controlled by the line pressure,
, as shown in Equation (
1).
In the hydraulic system, pressure is proportional to the torque. Neglecting the mechanical losses, the control pressure,
, is derived from the widely used torque control law.
where
K is given by
where
,
A, and
R are the air density, rotor swept area, and distance from the rotor center to the tips of the blade, respectively.
is the maximum power coefficient and
is the optimal TSR.
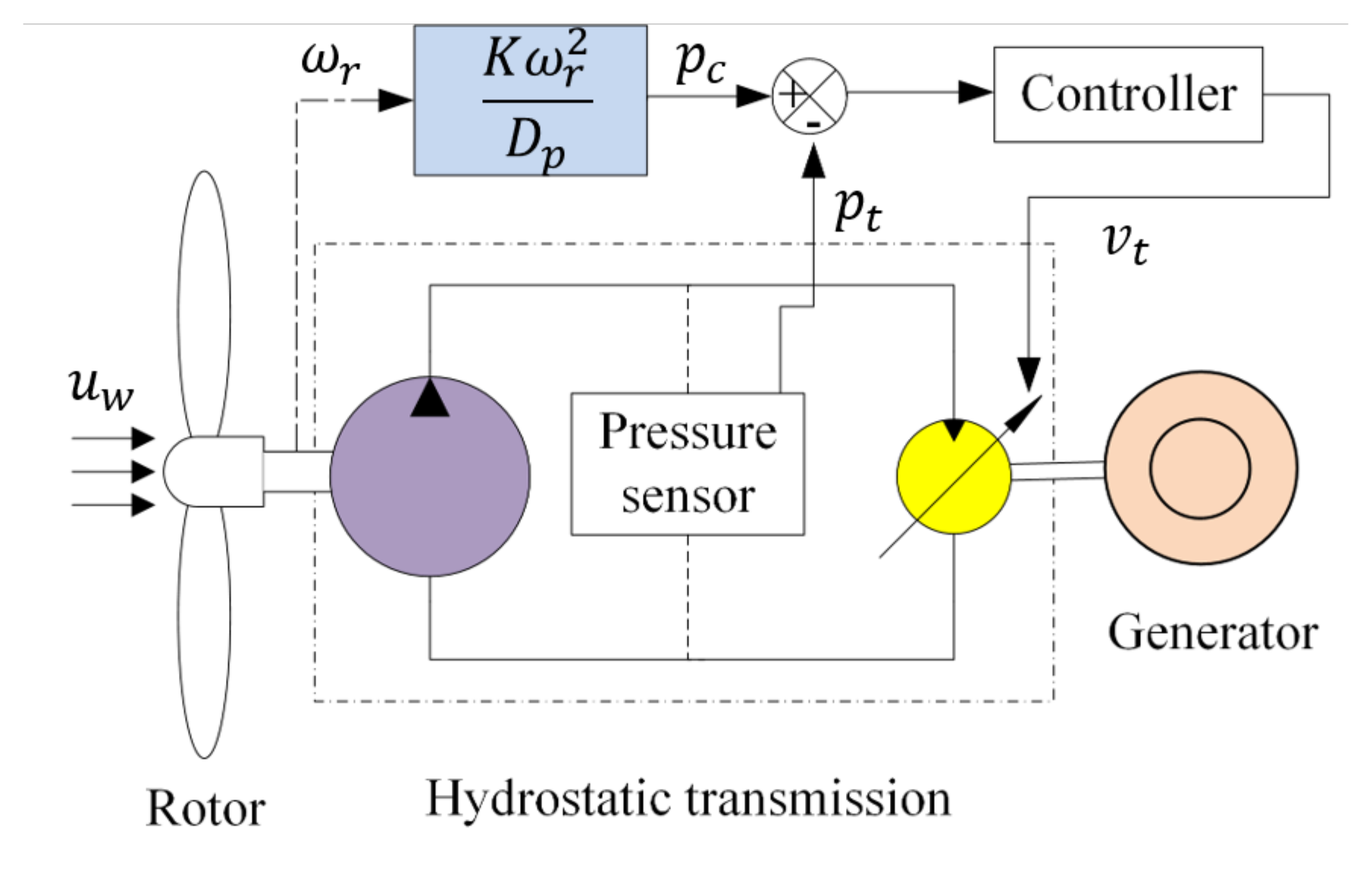
The HST pressure is electronically controlled by the HST motor swash plate voltage. The system has two states and one actuator dynamics. The transfer function from voltage input,
to the pressure,
is a third-order system. To minimize the tracking error and reject disturbances, a PI controller is implemented to determine the swash plate voltage [
9,
24]. The control schematic is shown in
Figure 3. The performance of the HST and controller is measured on the power regenerative dynamometer.
To implement the pressure controller, we only need the rotor speed for the reference command and the pressure for tracking. The pressure control automatically brings the turbine to the optimum point, since the reference command includes optimal values of and . With knowledge of accurate turbine parameters, the pressure control method can maximize the power capture without measuring the wind speed.
4. Experimental Setup
Performance validation of the designed HST drive train in a commercial wind turbine is a daunting task. The wind turbine requires modification to accommodate the HST drive train in its nacelle. Real-time diagnosis on the tall tower is also challenging.
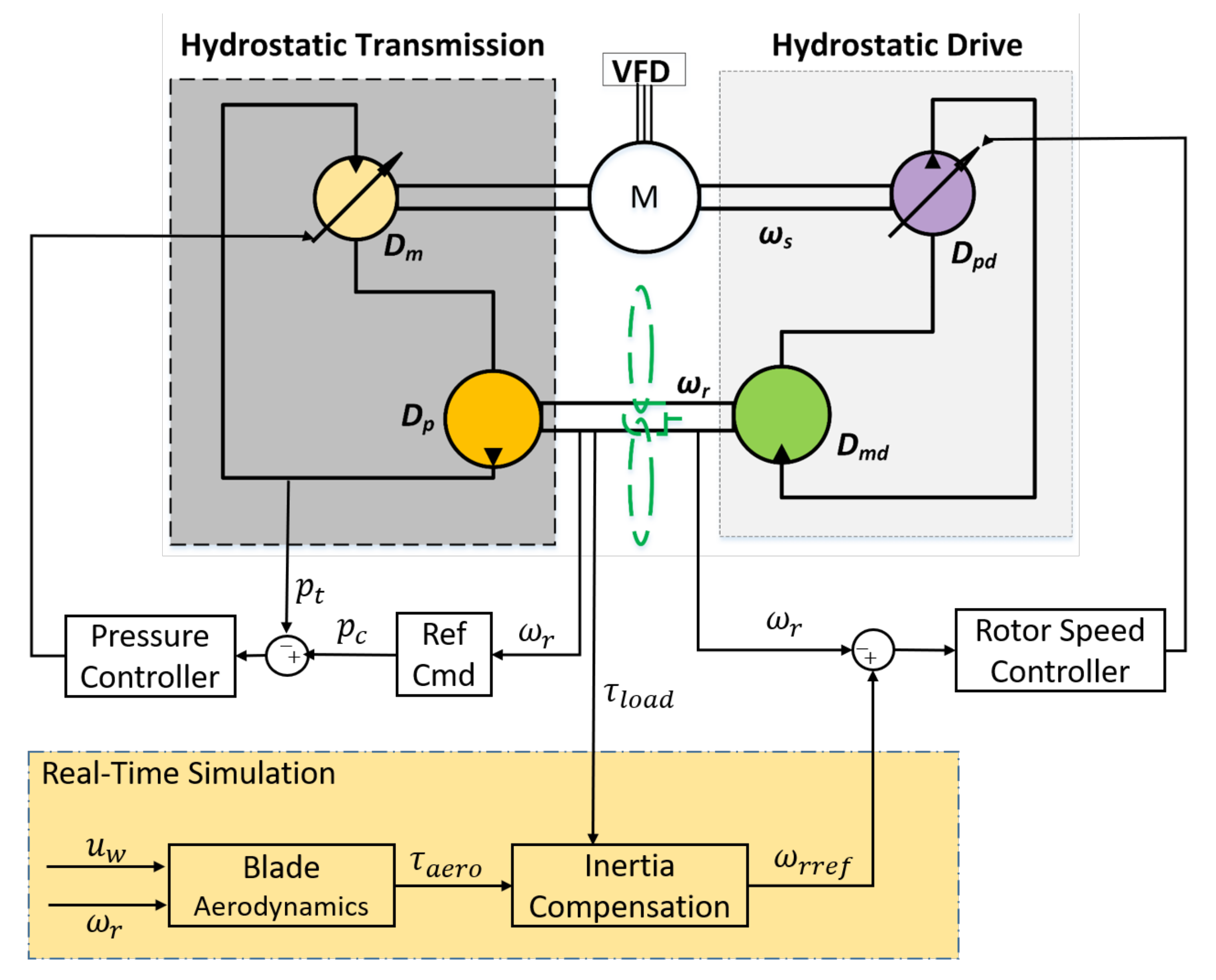
Hardware-in-the-loop (HIL) simulation is developed to validate the performance of the HST drive train and its control strategy, in a virtual wind turbine environment before implementation on a wind turbine system. The HIL test architecture on the power regenerative research platform is illustrated in
Figure 4. The real-time aerodynamic torque,
in the HIL simulation, is determined by a look-up table using wind data and rotor speed.
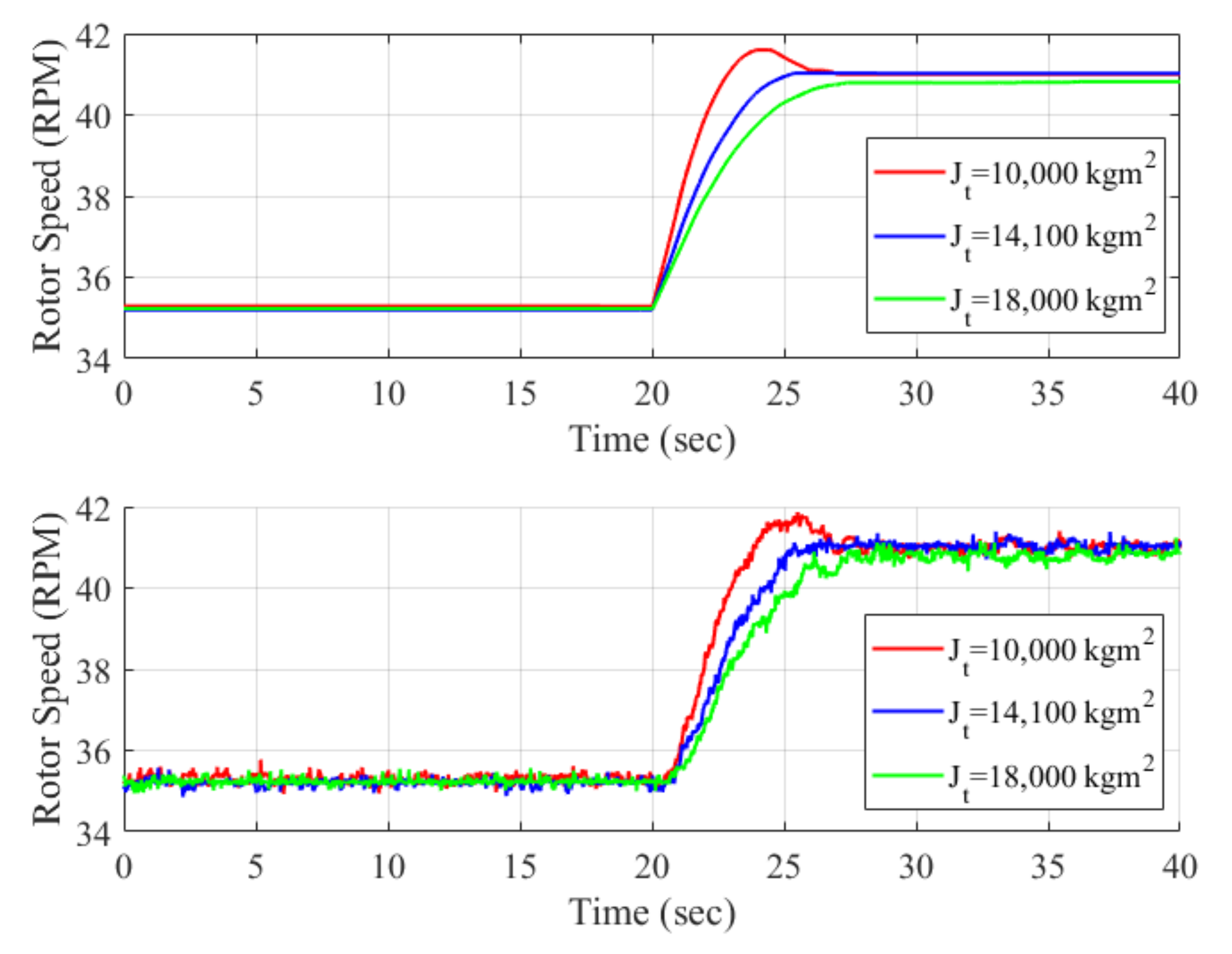
The inertia of the turbine rotor,
has a considerable effect on the dynamic behavior of the turbine. It is not feasible to install a large flywheel on the dynamometer. As a result, the rotor on the dynamometer has significantly lower inertia than that of a real turbine. To simulate the dynamics of a turbine rotor, it is necessary to consider the effect of large blade inertia in a real-time simulation. The measured load torque on the rotor shaft of the dynamometer,
, is fed to the simulation. The reference rotor speed
is computed from
,
, and turbine rotor inertia using Equation (
8). The computed speed is sent to the dynamometer and emulated by controlling the swash plate of the HSD pump. The rotor speed is tracked by implementing a feedback controller.
The HST motor swash plate is controlled to achieve maximum power in the turbine. Power from the drivetrain is fed to the dynamometer to assist the electric motor to drive the HSD pump.
Electric grid transients can be simulated in a HIL simulation. The dynamometer is capable of emulating the grid frequency in the high-speed shaft using the electric motor and VFD controller. The detailed dynamics and control of the power regenerative dynamometer are described in Mohanty et al. [
24].
The dynamometer is equipped with a pressure, flow, and temperature sensor in all fluid lines, and torque and speed sensor in all mechanical lines. The sensors are calibrated per industrial standards. The overall uncertainty of each sensor is less than . The sensor data are collected by NI-DAQ at a 1 kHz sampling frequency. Matlab Simulink Real-Time is used for real-time data acquisition and dynamometer control.
4.1. Test Turbine
In this paper, the performance of the HST is investigated for a 60 kW, horizontal axis, and variable speed turbine, manufactured by Polaris America (
www.polarisamerica.com, accessed on 13 November 2021). The speed and torque range of the selected turbine is within the operating range of the HST wind turbine transmission in our dynamometer. No such turbines with complete specifications are available. All needed turbine parameters are available, except the
curve and rotor inertia. The parameters of the turbine are listed in
Table 2. The
curve is generated by the standard mathematical equation as shown in the section below. The rotor inertia is computed by scaling the rotor inertia of the NREL AOC 50 kW reference turbine, creating the best available model for a 60 kW turbine.
4.2. Rotor Aerodynamics
An important parameter for power regulation is the power coefficient,
, of the turbine. It is a nonlinear function and depends on the blade design. The
values of the test turbine are not disclosed by the manufacturer, and thus, had to be derived analytically. The
as a function of the tip speed ratio and the blade pitch angle,
is shown in Equation (
9) [
25,
26].
where the values of the coefficients
for
and
x depend on the turbine type. The maximum power coefficient,
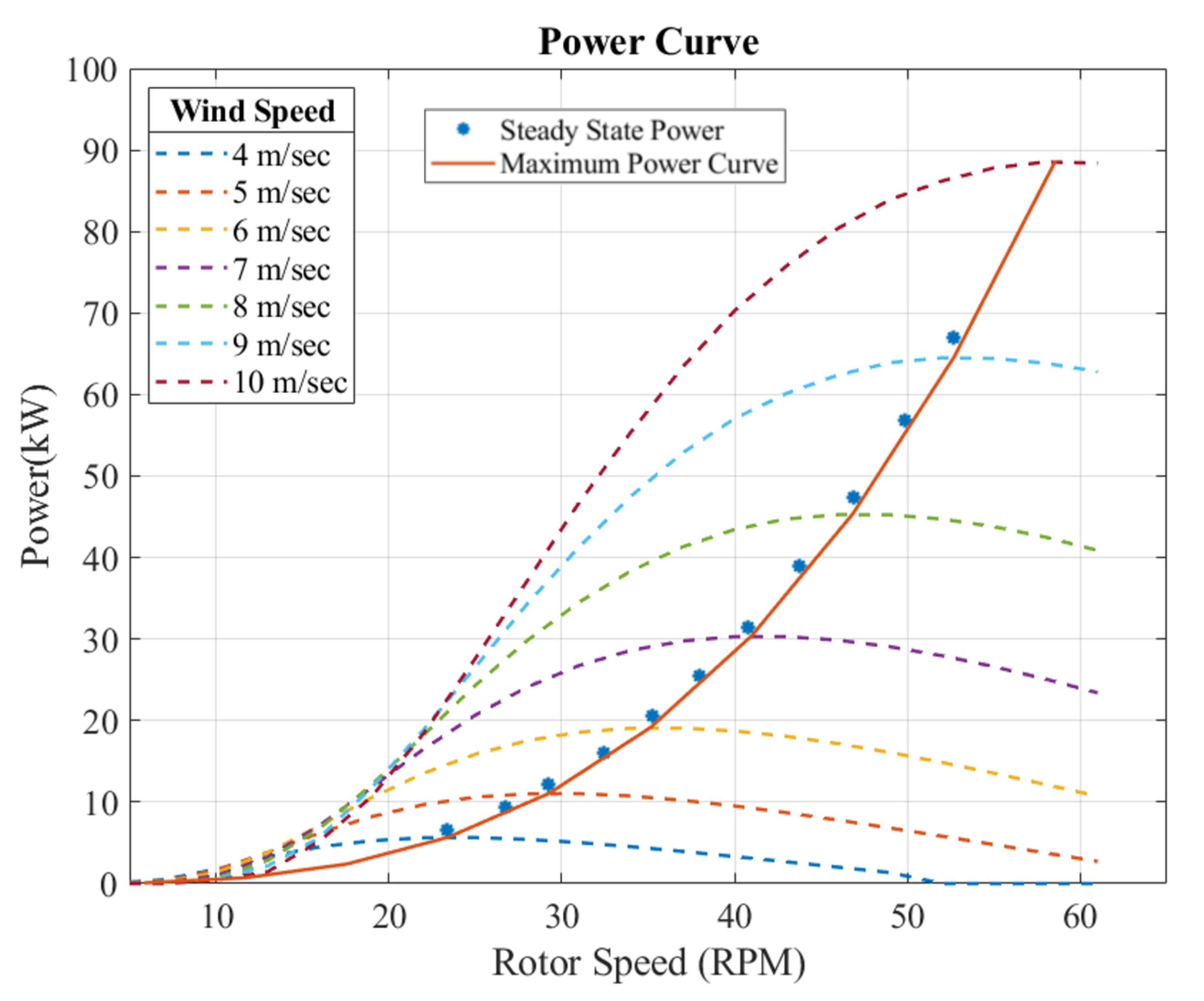
, is computed from the output power curve data, assuming the drive train efficiency of
. The
of the test turbine for
and
is plotted in
Figure 5.
The value of of the test turbine is determined from the curve and implemented in the controller design. Using the non-dimensional -TSR curve, the aerodynamic torque of the rotor, , is derived as a function of the rotor speed and wind speed. The look-up table of the aerodynamic torque is implemented in the HIL simulation.
4.3. Rotor Inertia
The rotor inertia of the test turbine is derived from the reference turbine. The moment of inertia of a blade about the rotor axis is given as
where
M and
L are the mass and length of a turbine blade. The mass is proportional to the density,
, cross-sectional area,
and length. If the blade cross-sectional area and material density of the test turbine are assumed to be equal to that of the reference turbine, the moment of inertia is proportional to the third power of the blade length. Thus the rotor inertia is scaled with respect to that of the reference turbine.
4.4. Wind Input
The average wind speed varies greatly on a seasonal, hourly, and short-term basis, due to the effects of air density, altitude, surface topology, etc. Daily variations in solar radiation cause diurnal fluctuations. Short-term wind speed variation is manifested as wind turbulence and gusts.
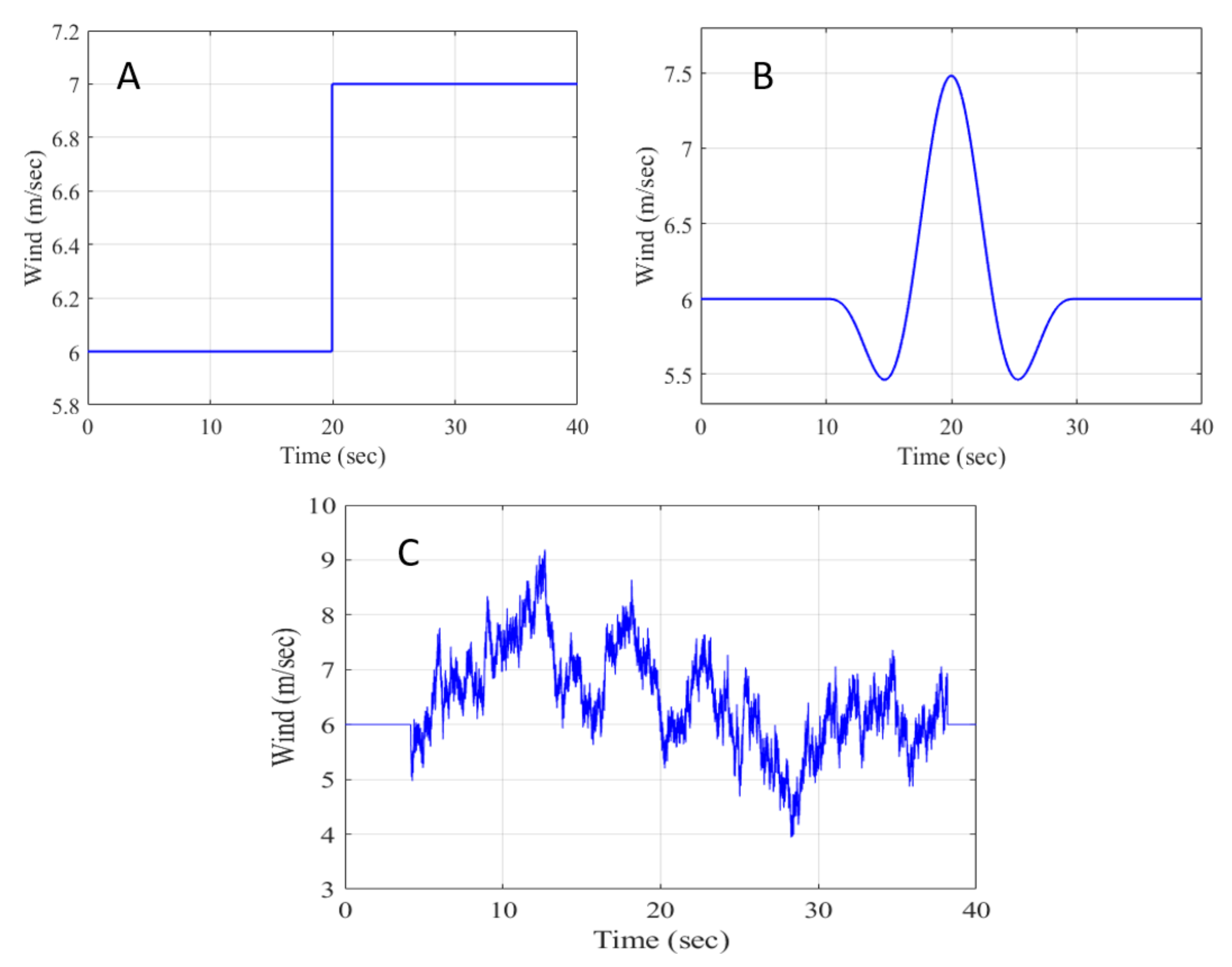
The HST wind turbine performance is measured under three wind profiles: (i) a step input, (ii) a wind gust, and (iii) turbulent wind.
During the step input, the wind speed is changed from
to
at the 20 s time point, shown in
Figure 6A. The gust wind profile, shown in
Figure 6B, is created according to the IEC standard [
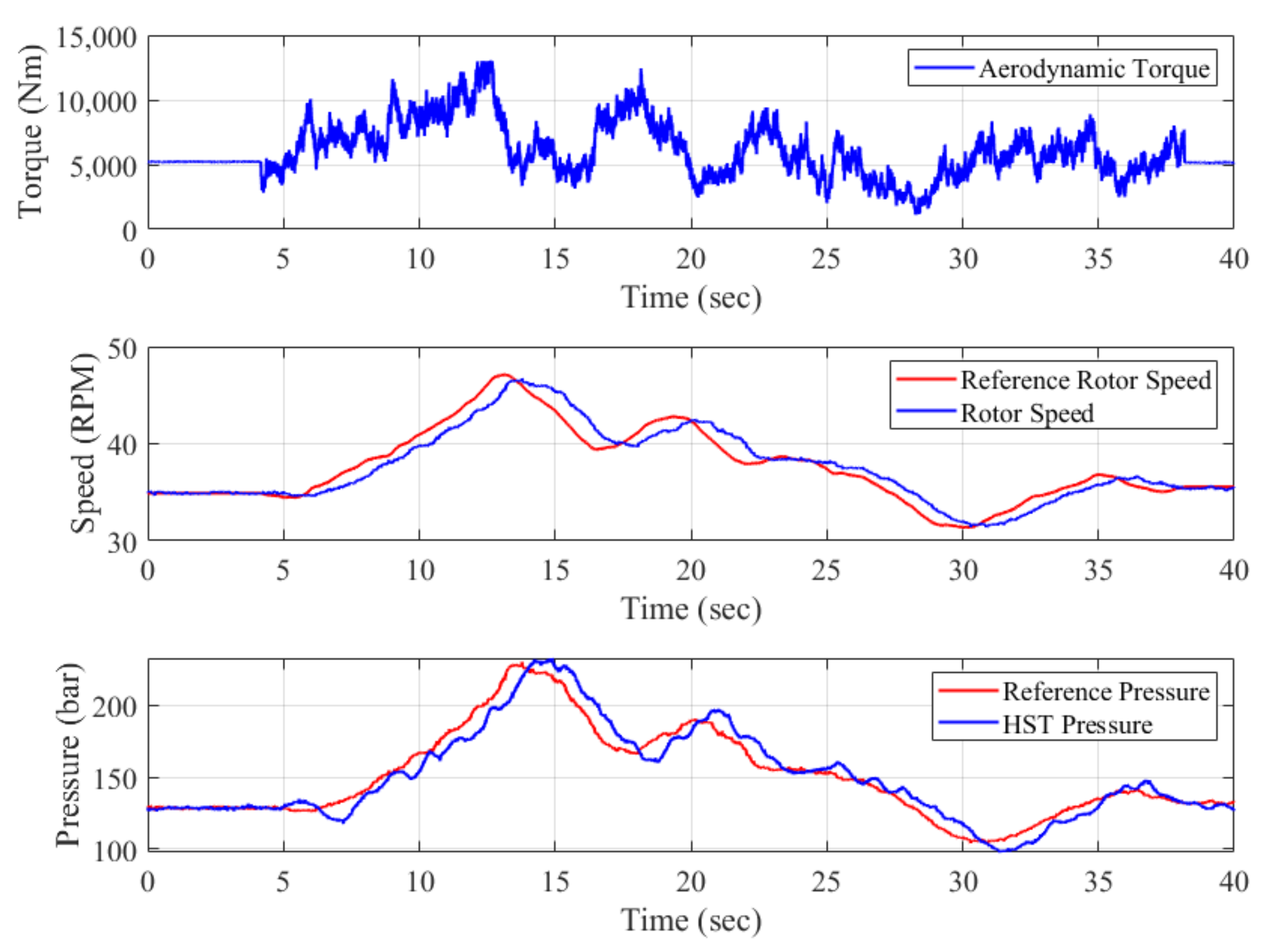
27]. The turbulent wind profile, shown in
Figure 6C, is created using Turbsim, a stochastic, turbulent wind simulator developed by NREL [
28]. The hub height wind speed is computed using the IEC Kaimal spectral model with a mean turbulence intensity of
at
.
6. Comparisons
The performance of the HST drive train is compared with a simulated 60 kW gearbox turbine (GB). The gearbox turbine is equipped with the same rotor, but the drive train contains a gearbox, an induction generator, and power electronics. For the simulation, a gear ratio of 21 is selected to match the generator speed of
at the rated rotor speed.
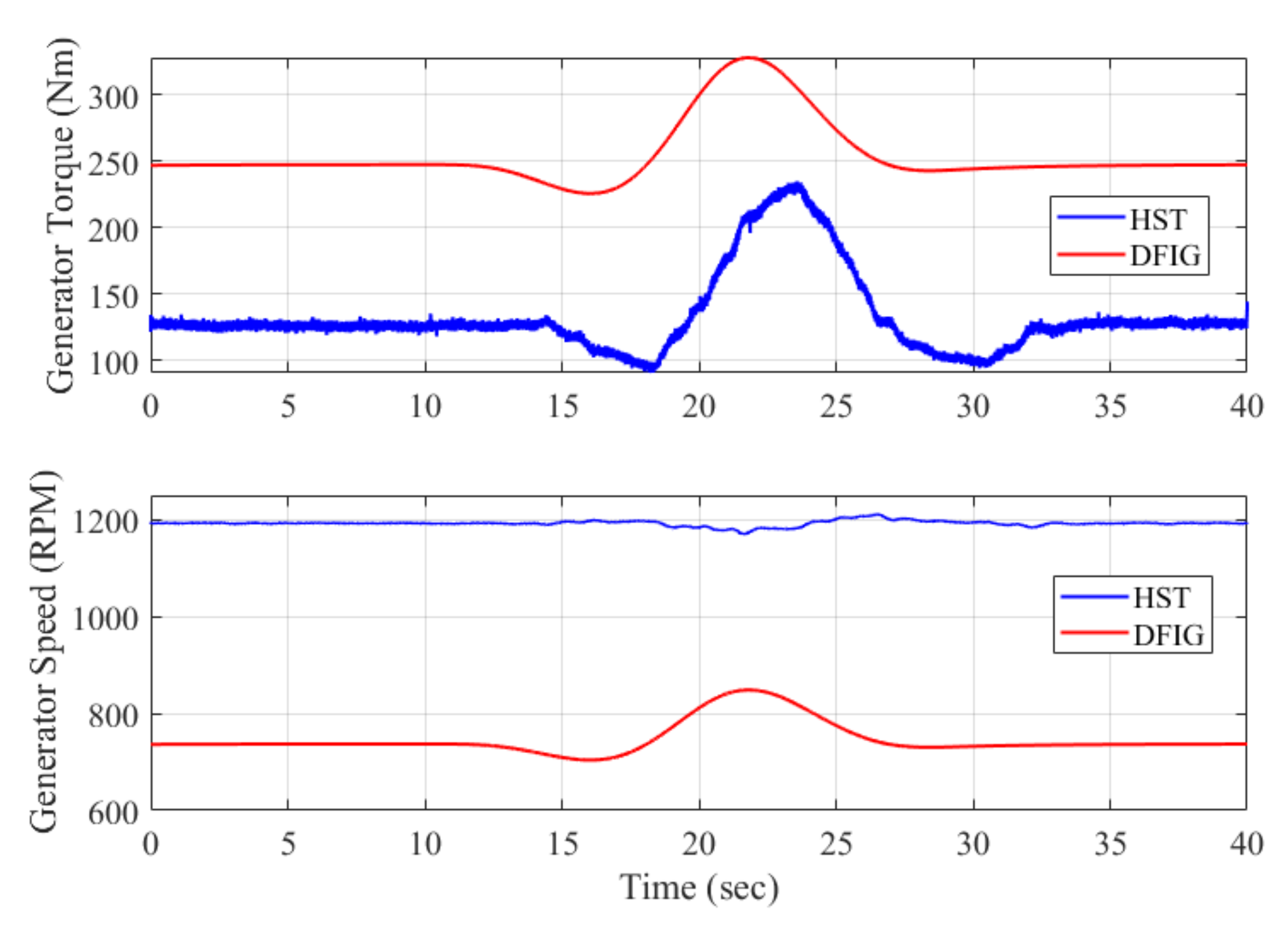
Figure 13 shows the torque and speed of both the HST drive train and simulated gearbox drive train in response to the wind gust in
Figure 6.
From
Figure 13, the torque on the generator shaft is lower in the HST turbine than in the gearbox turbine, but the generator speed is higher in the HST turbine. When the input wind speed is less than rated, in the case of a gearbox turbine, the generator speed is less than the synchronous speed. As the generator speed in the gearbox turbine fluctuates in the face of a wind gust, power electronics are required to match the grid frequency. In the HST drive train, the generator speed remains nearly constant at synchronous speed despite the wind gust. The HST decouples the generator speed from the rotor speed allowing the generator to rotate at synchronous speed.
Table 3 compares the weight, cost, and efficiency of an HST and a gearbox turbine. The weight comparison is based on a 100 kW turbine. The HST weight includes the HST pump, motor, and hydraulic ancillaries and the gearbox weight includes the Flender gearbox and gear oil [
31]. The weight of the synchronous generator and induction generator is assumed to be the same and the weight of the power electronics in the gearbox turbine is neglected. The HST drive train is 50% lighter than the gearbox drive train.
In a gearbox turbine, the drive train is capital intensive. The cost of the gearbox is 13%, the generator is 3.5%, and the power electronics is 5% of the total turbine cost [
32]. Gearboxes for wind turbines are expensive because of their high torque capacity. However, HSTs are highly suitable for this high torque application. Industrial products in this power range are readily available, limiting the HST cost to 10% of the turbine cost. The HST wind turbine does not require power electronics, resulting in a total cost saving of 8%.
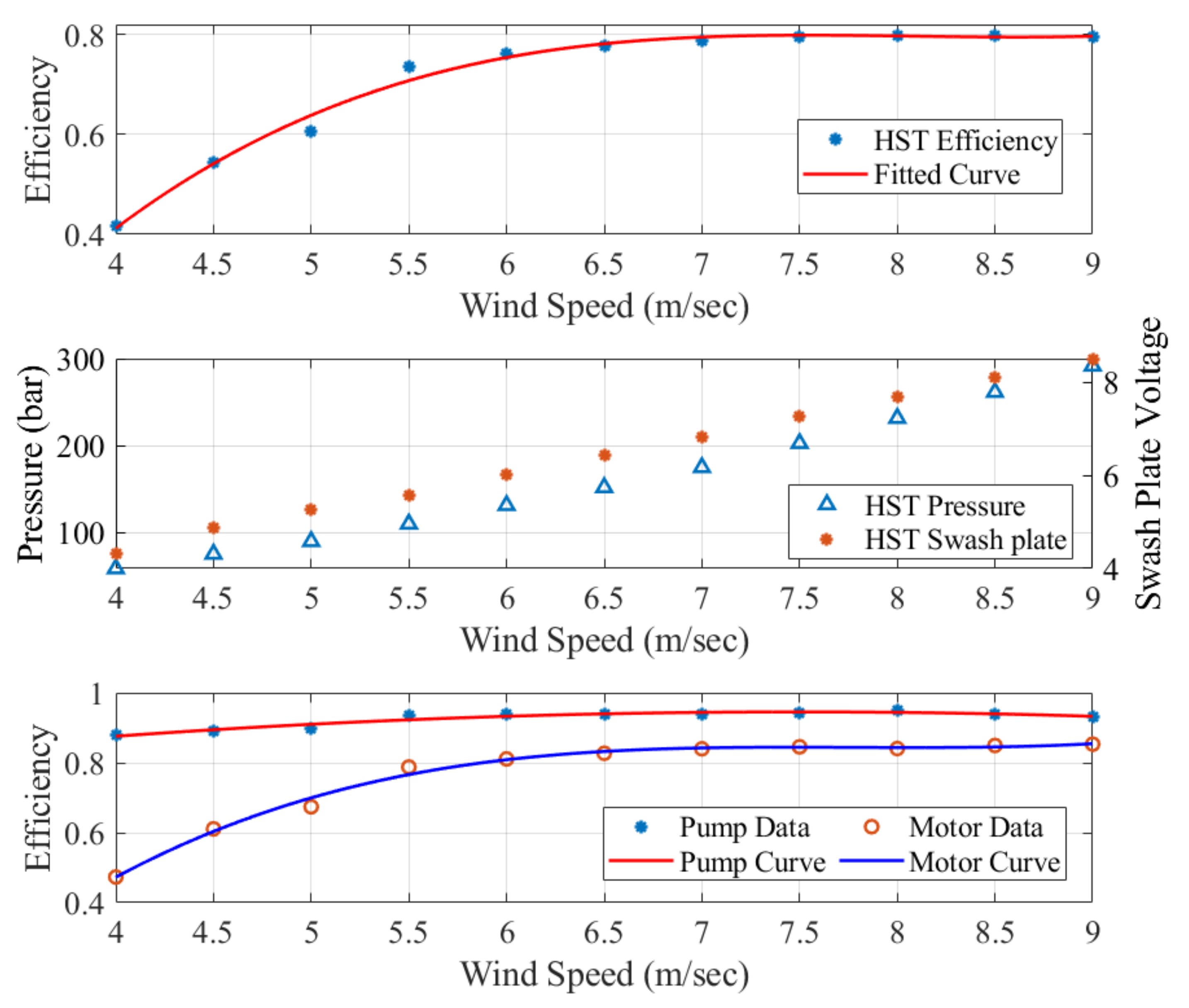
The power efficiency of the HST wind turbine is also compared with a gearbox turbine in
Table 3. For the analysis, the power loss in a gearbox, induction generator, and power electronics is assumed to be 5%, 4%, and 5%, respectively [
33]. As discussed in the previous section, reasonable values for the HST efficiency would be 86%, and for the synchronous generator would be 98%. Even though the HST efficiency is less than the gearbox efficiency the overall system efficiencies are comparable. This means the Levelized cost of electricity (LCOE) would be lower for the HST wind turbine.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}