
Characteristic Analysis and Experimental Verification of Electromagnetic and Vibration/Noise Aspects of Fractional-Slot Concentrated Winding IPMSMs of e-Bike



Abstract
:1. Introduction
2. Electromagnetic Analysis
2.1. No-Load Analysis
2.2. Parameter Calculation
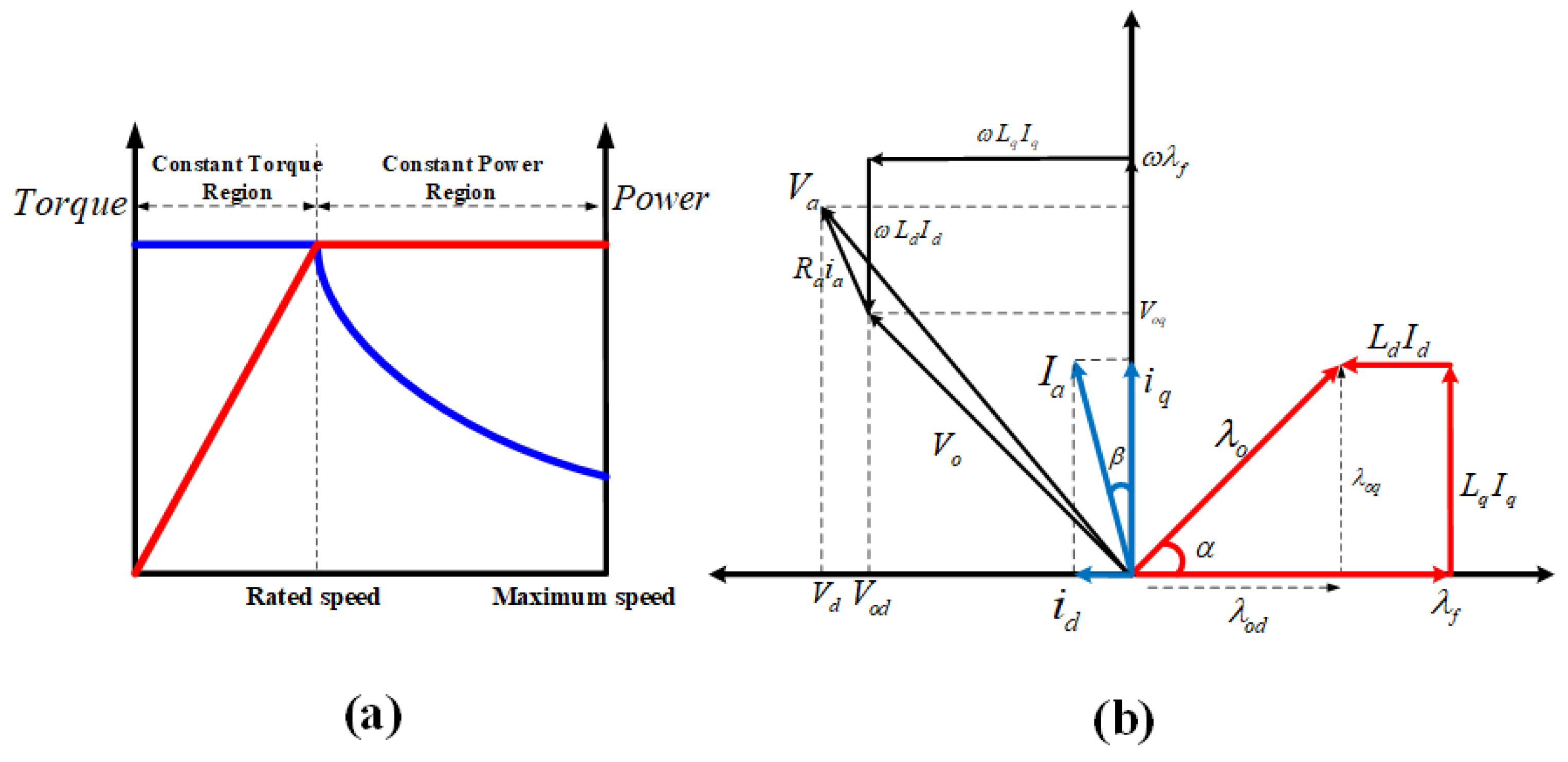
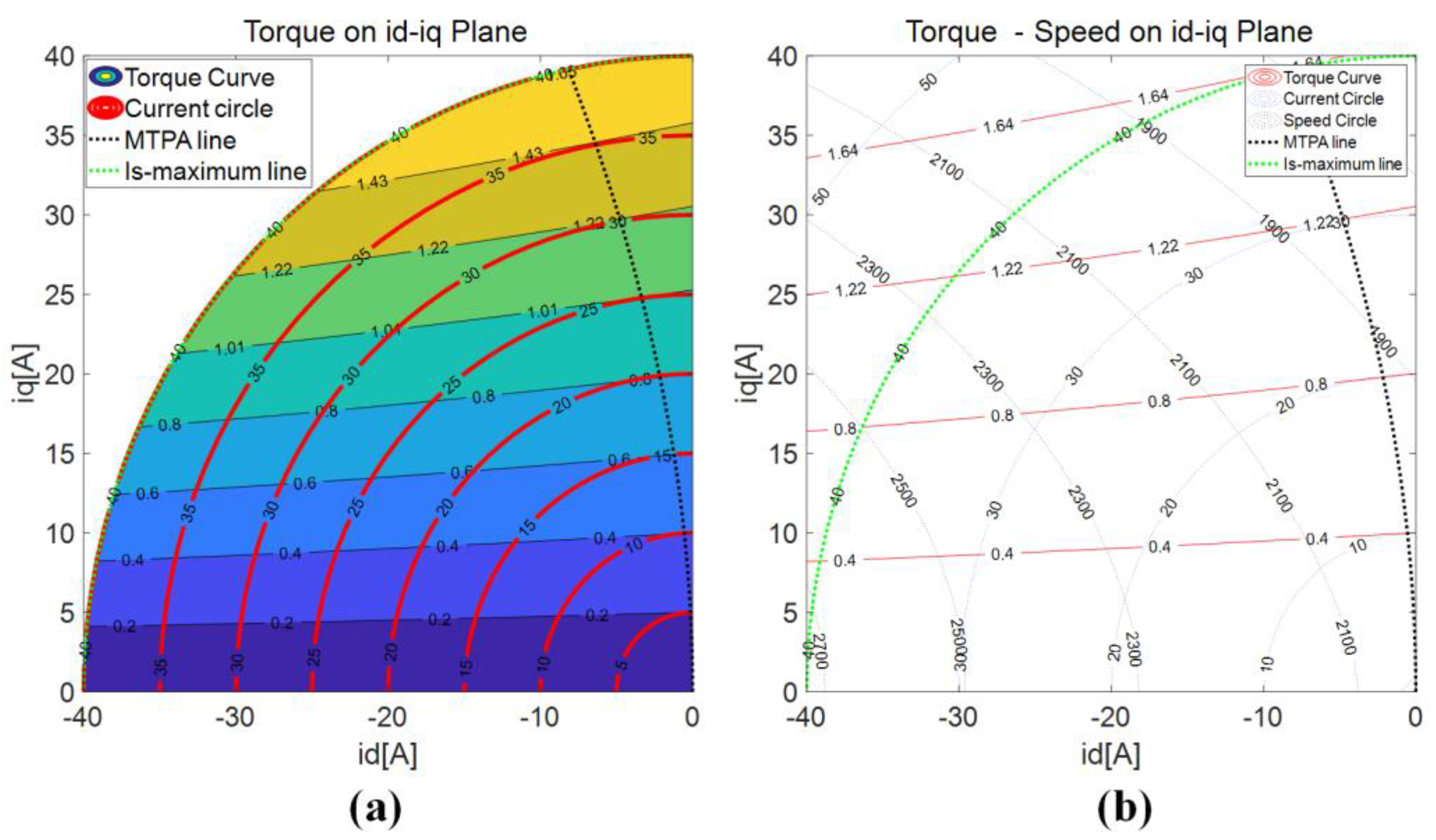
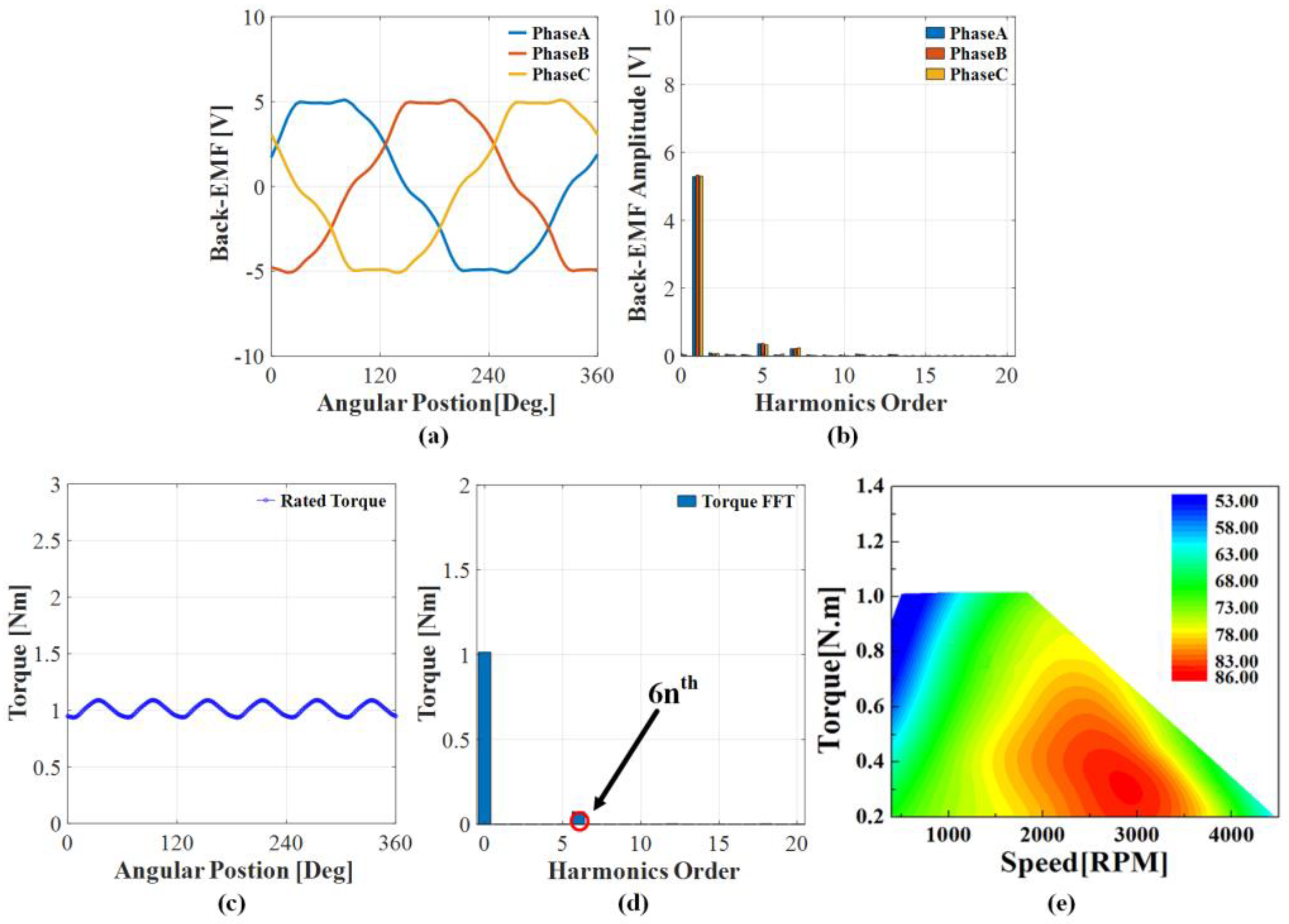
2.3. Load Analysis
3. Mechanical Analysis
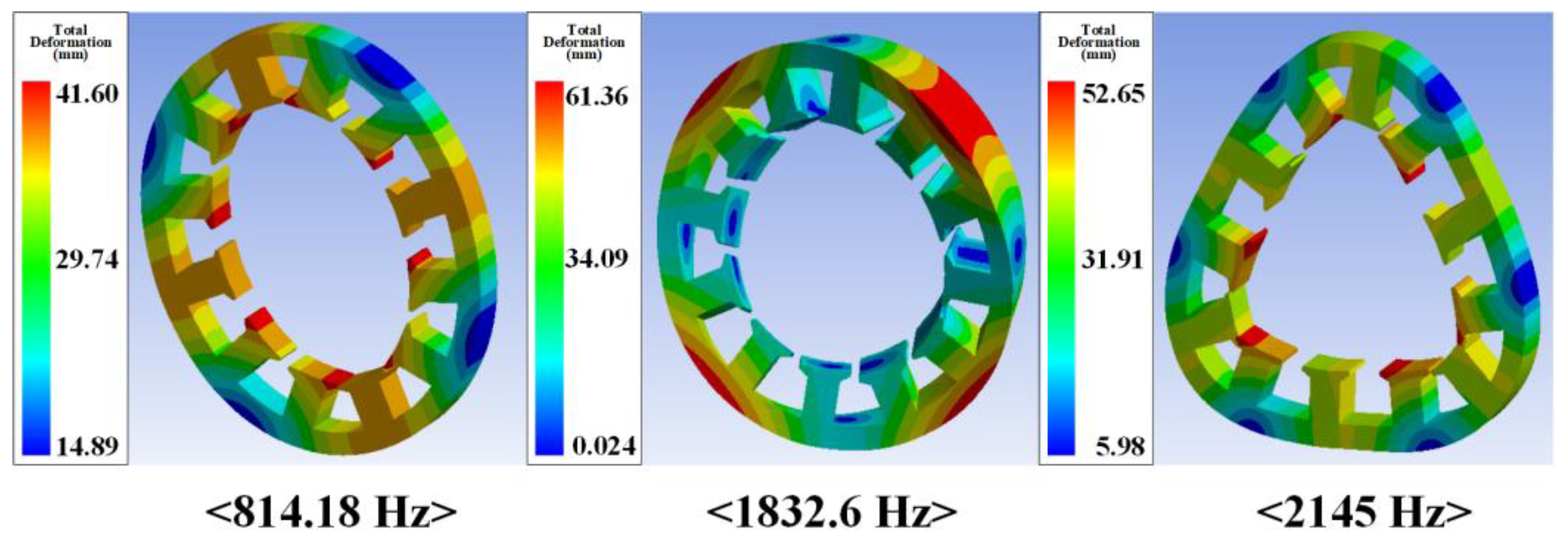
3.1. Modal Analysis
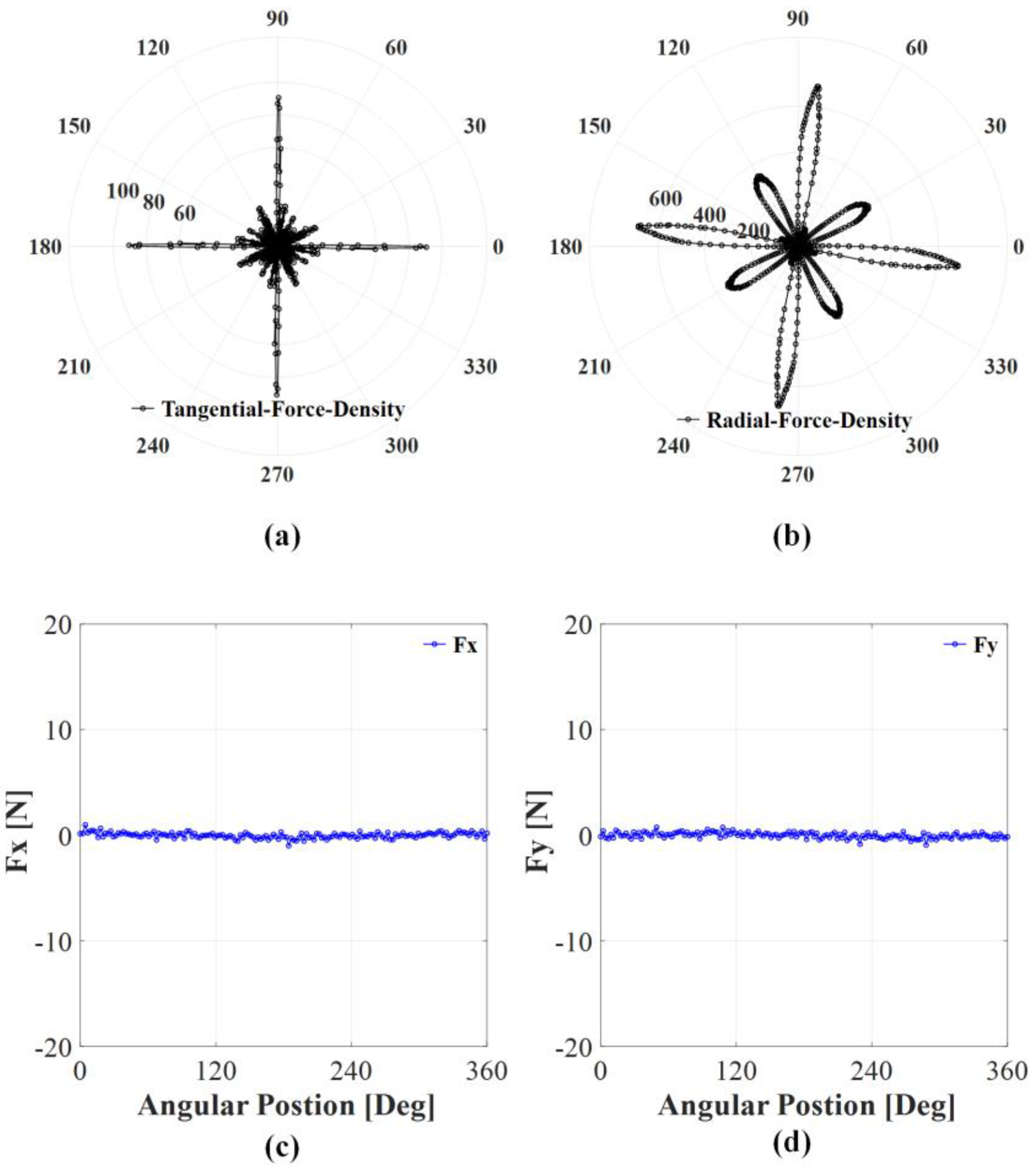
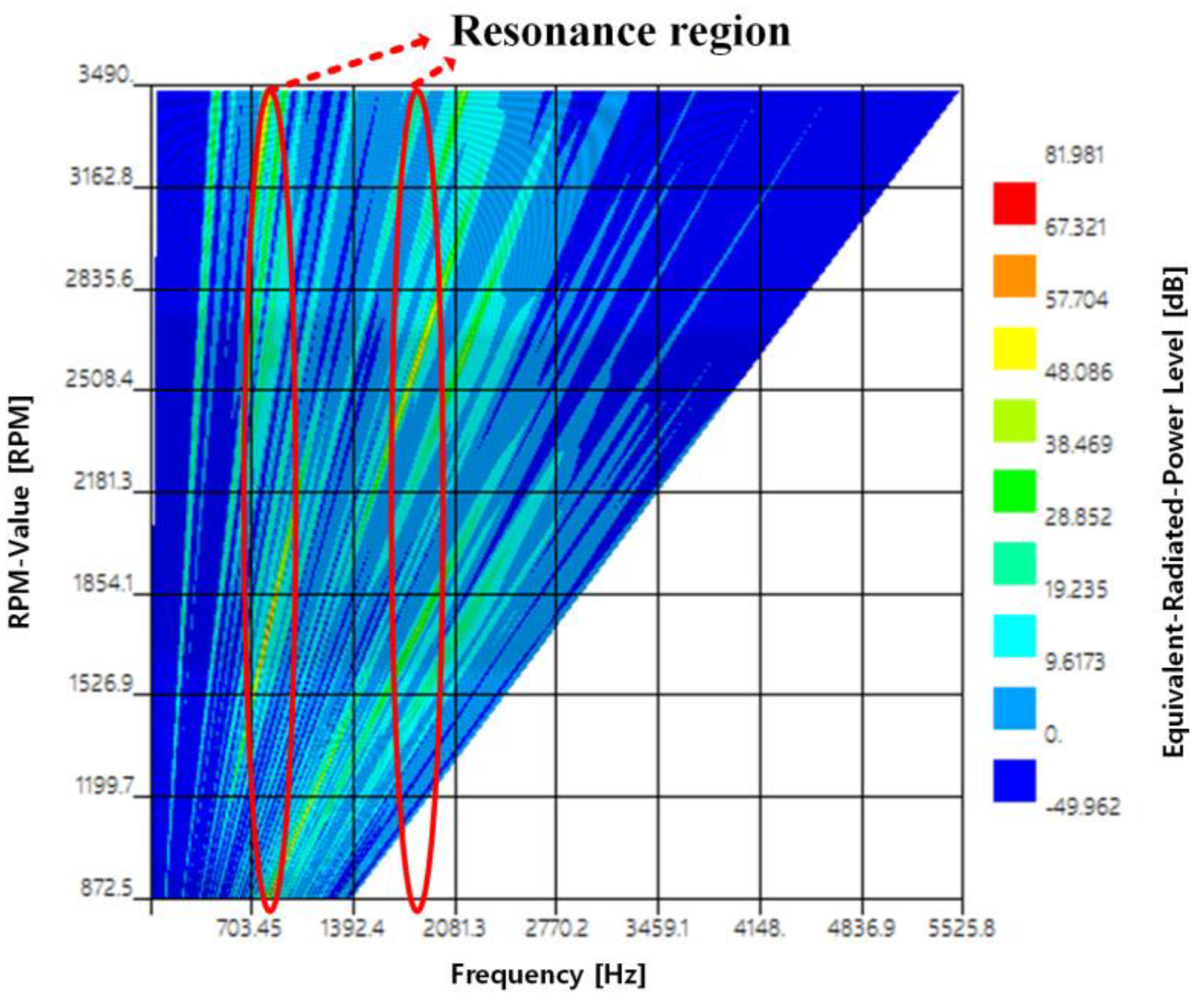
3.2. Acoustic Noise Analysis
4. Experiment Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Tomigashi, Y.; Ueta, T.; Yokotani, K.; Ikegami, K. Reducing Cogging Torque of Interior Permanent Magnet Synchronous Motor for Electric Bicycles. In Proceedings of the IEEE European Conference on Power Electronics and Applications, Dresden, Germany, 11–14 September 2005. [Google Scholar]
- Yang, Z.; Shang, F.; Brown, I.P.; Krishnamurthy, M. Comparative Study of Interior Permanent Magnet, Induction, and Switched Reluctance Motor Drives for EV and HEV Applications. Proc. IEEE Trans. Transp. Electrif. 2015, 1, 245–254. [Google Scholar] [CrossRef]
- Bae, J.N. Permanent Magnet Synchronous Machine Design through and Automatic Selection of the Specific Loadings. Ph.D. Thesis, Hanyang University, Seoul, Korea, 2010. [Google Scholar]
- Cho, S.; Jung, K.; Choi, J. Design Optimization of Interior Permanent Magnet Synchronous Motor for Electric Compressors of Air-Conditioning Systems Mounted on EVs and HEVs. IEEE Trans. Magn. 2018, 54, 1–5. [Google Scholar] [CrossRef]
- Shin, K.; Choi, J.; Cho, H. Characteristic Analysis of Interior Permanent-Magnet Synchronous Machine with Fractional-Slot Concentrated Winding Considering Nonlinear Magnetic Saturation. IEEE Trans. Appl. Supercond. 2016, 26, 5200404. [Google Scholar] [CrossRef]
- Kim, S.; Lee, G.; Hong, J.; Jung, T. Design Process of Interior PM Synchronous Motor for 42-V Electric Air-Conditioner System in Hybrid Electric Vehicle. IEEE Trans. Magn. 2008, 44, 1590–1593. [Google Scholar]
- Kim, S.H. DC, AC, BLDC Motor Control; Bokdoo Press: Seoul, Korea, 2012. [Google Scholar]
- Gieras, J.F.; Wang, C.; Lai, J.C. Noise of Poly-Phase Electric Motors, 2nd ed.; Taylor & Francis: New York, NY, USA, 2006. [Google Scholar]
- Zhu, Z.Q.; Xia, Z.P.; Wu, L.J.; Jewell, G.W. Influence of slot and pole number combination on radial force and vibration modes in fractional slot PM brushless machines having single-and double-layer windings. In Proceedings of the IEEE Energy Conversion Congress and Exposition (ECCE), San Jose, CA, USA, 20–24 September 2009; pp. 3443–3450. [Google Scholar]
- Zhu, Z.Q.; Xia, Z.P.; Wu, L.J.; Jewell, G.W. Analytical modeling and finite element computation of radial vibration force in fractional-slot permanent-magnet brushless machines. IEEE Trans. Ind. Appl. 2010, 46, 1908–1918. [Google Scholar] [CrossRef]
- Im, D.H.; Chang, J.H.; Park, S.C.; Kwon, B.I.; Hong, J.P.; Kim, B.T. Analysis of radial force as a source of vibration in an induction motor with skewed slots. IEEE Trans. Magn. 1997, 33, 1650–1653. [Google Scholar] [CrossRef]
- Kobayashi, T.; Tajima, F.; Ito, M.; Shibukawa, S. Effects of slot combination on acoustic noise from induction motors. IEEE Trans. Magn. 1997, 33, 2101–2104. [Google Scholar] [CrossRef]
- Studer, C.; Keyhani, A.; Sebastian, T.; Murthy, S.K. Study of cogging torque in permanent magnet machines. In Proceedings of the 1997 IEEE Industry Applications Society (IAS ’97), New Orleans, LA, USA, 4–9 October 1997; pp. 42–49. [Google Scholar]
- Kim, B.-T.; Kwon, B.-I.; Park, S.-C. Reduction of electromagnetic force harmonics in asynchronous traction motor by adapting the rotor slot number. IEEE Trans. Magn. 1999, 35, 3742–3744. [Google Scholar]
- Bianchi, N.; Bolognani, S. Design techniques for reducing the cogging torque in surface-mounted PM motors. IEEE Trans. Ind. Appl. 2002, 38, 1259–1265. [Google Scholar] [CrossRef]
- Dai, M.; Keyhani, A.; Sebastian, T. Torque ripple analysis of a PM brushless DC motor using finite element method. IEEE Trans. Energy Convers. 2004, 19, 40–45. [Google Scholar] [CrossRef]
- Mori, D.; Ishikawa, T. Force and vibration analysis of induction motors. IEEE Trans. Magn. 2005, 41, 1948–1951. [Google Scholar] [CrossRef]
- Sung, S.; Jang, G.; Kang, K. Noise and vibration due to rotor eccentricity in a HDD spindle system. Microsyst. Technol. 2014, 20, 1461–1469. [Google Scholar] [CrossRef]
- Seo, B.; Sung, S.; Kang, K.; Song, J.; Jang, G. Unbalanced magnetic force and cogging torque of PM motors due to the interaction between PM magnetization and stator eccentricity. Microsyst. Technol. 2016, 22, 1249–1255. [Google Scholar] [CrossRef]
- Chen, Q.; Liu, G.; Gong, W.; Qu, L.; Zhao, W.; Shen, Y. Design of a spoke-type permanent-magnet motor with optimal winding configuration for electric vehicle applications. J. Appl. Phys. 2012, 111, 07E710. [Google Scholar] [CrossRef]
- Meessen, K.J.; Paulides, J.J.H.; Lomonova, E.A. Force calculations in 3-D cylindrical structures using Fourier analysis and the Maxwell stress tensor. IEEE Trans. Magn. 2012, 49, 536–545. [Google Scholar] [CrossRef]
- Hur, J.; Reu, J.-W.; Kim, B.; Kang, G.-H. Vibration reduction of IPM-type BLDC motor using negative third harmonic elimination method of air-gap flux density. IEEE Trans. Ind. Appl. 2011, 47, 1300–1309. [Google Scholar]
- Fang, L.; Jung, J.; Hong, J.-P.; Lee, J.-H. Study on high-efficiency performance in interior permanent-magnet synchronous motor with double-layer PM design. IEEE Trans. Magn. 2008, 44, 4393–4396. [Google Scholar] [CrossRef]
- Jung, J.-W.; Lee, S.-H.; Lee, G.-H.; Hong, J.-P.; Lee, D.-H.; Kim, K.-N. Reduction design of vibration and noise in IPMSM type integrated starter and generator for HEV. IEEE Trans. Magn. 2010, 46, 2454–2457. [Google Scholar] [CrossRef]
- Ge, H.; Yu, M.; Berker, B.; Babak, N.-M.; Ali, E. Speed Range Extended Maximum Torque Per Ampere Control for PM Drives Considering Inverter and Motor Nonlinearities. IEEE Trans. Power Electron. 2017, 32, 7151–7159. [Google Scholar] [CrossRef]
- Mohamed, Y.A.-R.I.; Lee, T.K. Adaptive self-tuning MTPA vector controller for IPMSM drive system. IEEE Trans. Energy Convers. 2006, 21, 636–644. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Specification | IPMSM | Unit |
|---|---|---|
| Rated output power | 180 | W |
| Rated speed | 1745 | RPM |
| Pole/Slot | 8/12 | - |
| Stator OD | 116 | mm |
| Rotor OD | 71 | mm |
| Total magnet volume | 6249.6 | mm3 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, Y.-G.; Bang, T.-K.; Lee, J.-I.; Woo, J.-H.; Jo, S.-T.; Choi, J.-Y. Characteristic Analysis and Experimental Verification of Electromagnetic and Vibration/Noise Aspects of Fractional-Slot Concentrated Winding IPMSMs of e-Bike. Energies 2022, 15, 238. https://doi.org/10.3390/en15010238
Lee Y-G, Bang T-K, Lee J-I, Woo J-H, Jo S-T, Choi J-Y. Characteristic Analysis and Experimental Verification of Electromagnetic and Vibration/Noise Aspects of Fractional-Slot Concentrated Winding IPMSMs of e-Bike. Energies. 2022; 15(1):238. https://doi.org/10.3390/en15010238
Chicago/Turabian StyleLee, Young-Geun, Tae-Kyoung Bang, Jeong-In Lee, Jong-Hyeon Woo, Sung-Tae Jo, and Jang-Young Choi. 2022. "Characteristic Analysis and Experimental Verification of Electromagnetic and Vibration/Noise Aspects of Fractional-Slot Concentrated Winding IPMSMs of e-Bike" Energies 15, no. 1: 238. https://doi.org/10.3390/en15010238