
A Digital Delay Compensation Method to Improve the Stability of LCL Grid-Connected Inverters


Abstract
:1. Introduction
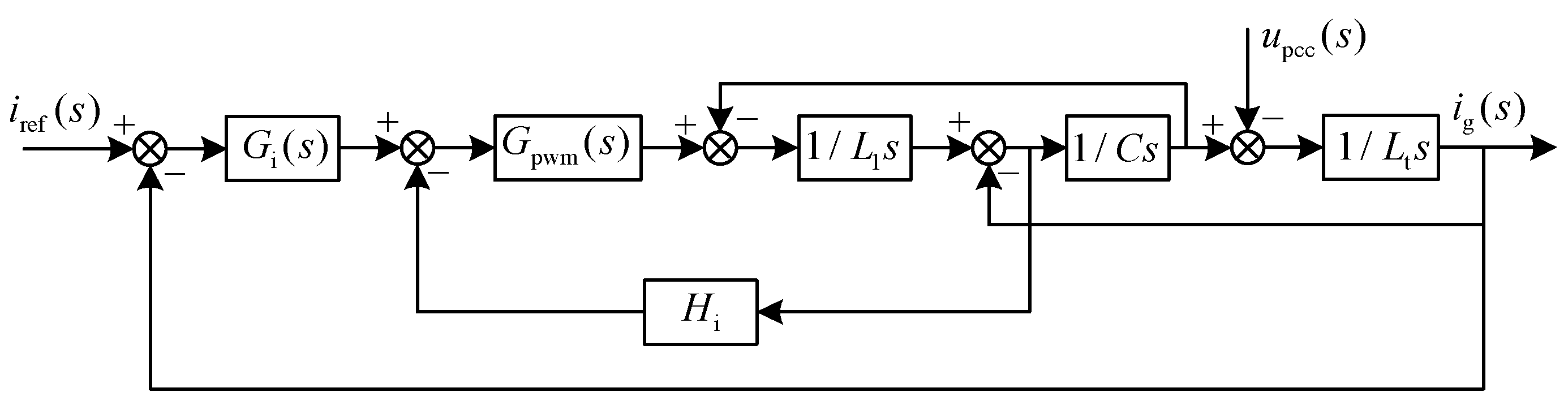
2. Three-Phase LCL-Type Grid-Connected Inverter System Model
3. The Influence of Digital Delay on Active Damping Characteristics
3.1. Active Damping Characteristics under Digital Control
3.2. The Influence of Active Damping on Properties near the Resonance Frequency
4. Delay Compensation Link
4.1. First-Order Lead Link
4.2. Improved Delay Compensation Link
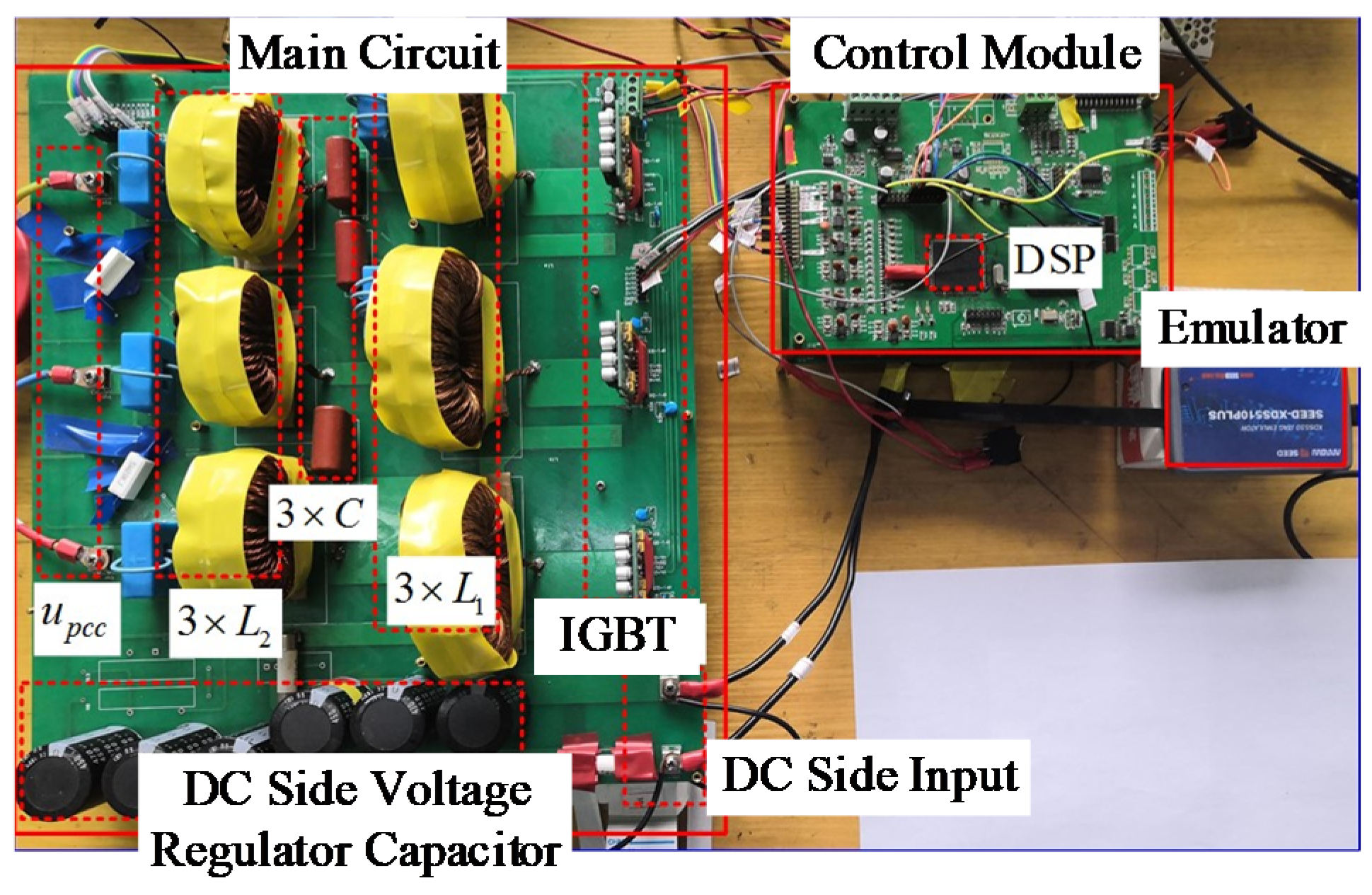
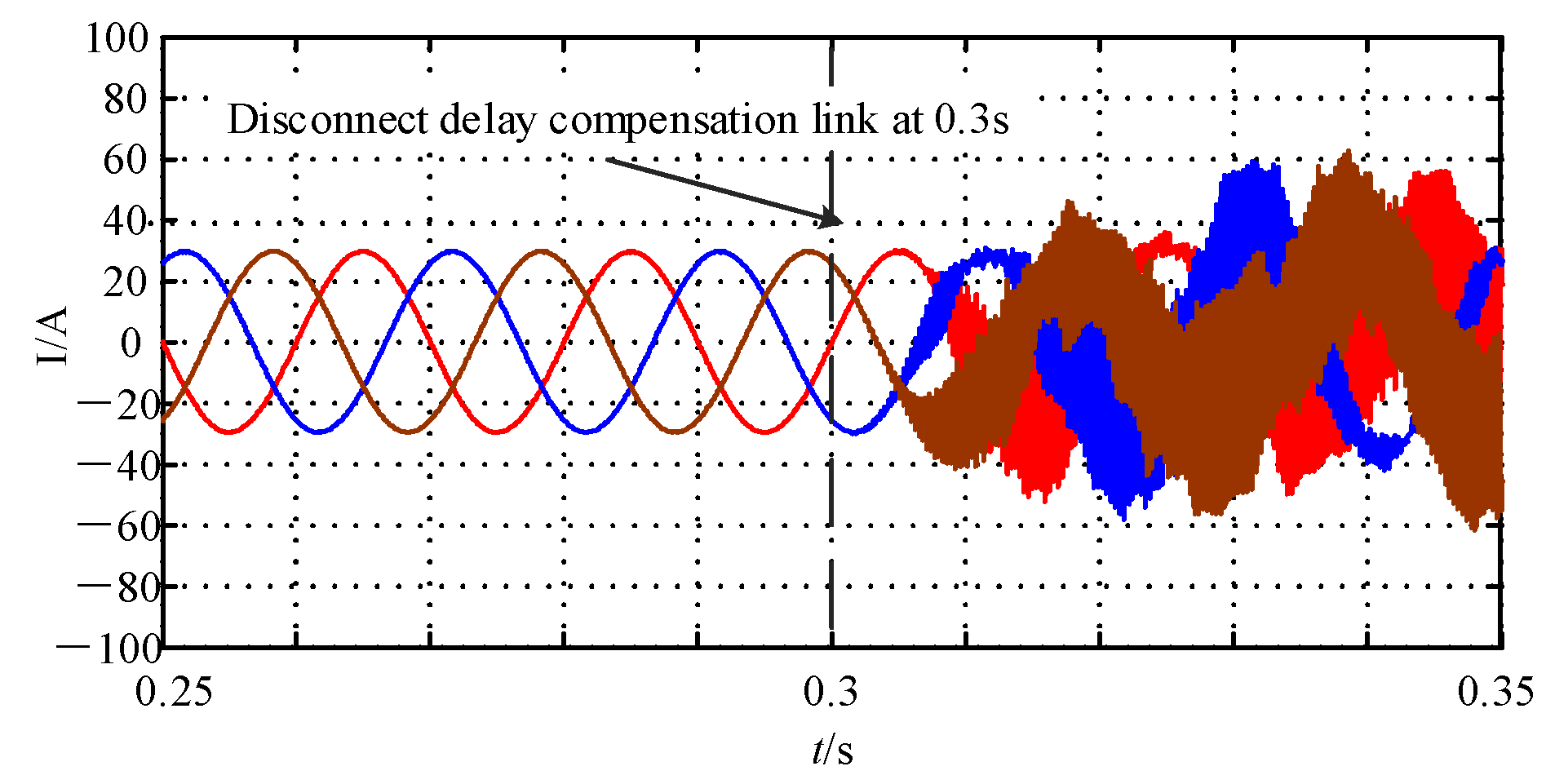
5. Simulation and Experimental Verification
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Fang, T.; Zhang, X.; Huang, C.; He, W.; Shen, L.; Ruan, X. Control Scheme to Achieve Multiple Objectives and Superior Reliability for Input-Series-Output-Parallel LCL-Type Grid-Connected Inverter System. IEEE Trans. Ind. Electron. 2019, 67, 214–224. [Google Scholar] [CrossRef]
- Zhu, D.; Zhou, S.; Zou, X.; Kang, Y. Improved Design of PLL Controller for LCL-Type Grid-Connected Converter in Weak Grid. IEEE Trans. Power Electron. 2019, 35, 4715–4727. [Google Scholar] [CrossRef]
- Alzola, R.P.; Liserre, M.; Blaabjerg, F.; Sebastián, R.; Dannehl, J.; Fuchs, F.W. Analysis of the Passive Damping Losses in LCL-Filter-Based Grid Converters. IEEE Trans. Power Electron. 2012, 28, 2642–2646. [Google Scholar] [CrossRef] [Green Version]
- Pena-Alzola, R.; Liserre, M.; Blaabjerg, F.; Ordonez, M.; Kerekes, T. A Self-commissioning Notch Filter for Active Damping in a Three-Phase LCL -Filter-Based Grid-Tie Converter. IEEE Trans. Power Electron. 2014, 29, 6754–6761. [Google Scholar] [CrossRef] [Green Version]
- Yunhui, H.; Zefan, S.; Jinrui, T.; Binyu, X.; Sheng, H. Design and analysis of DC-link voltage stabilizer for voltage source converter as connected to weak grid. Trans. China Electrotech. Soc. 2018, 33, 185–192. [Google Scholar]
- Perez-Estevez, D.; Doval-Gandoy, J.; Yepes, A.G.; Lopez, O.; Baneira, F. Enhanced Resonant Current Controller for Grid-Connected Converters with LCL Filter. IEEE Trans. Power Electron. 2017, 33, 3765–3778. [Google Scholar] [CrossRef]
- Fang, T.; Zhang, X.; Huang, C.; He, W.; Shen, L. Control strategy to reach multiple objectives for inputseries output-parallel LCL-type grid-connected inverter system. Trans. China Electrotech. Soc. 2019, 33, 1189–1200. [Google Scholar]
- Fang, T.; Huang, C.; Chen, N. A phase-lead compensation strategy on enhancing robustness of LCL-type grid-tied inverters under weak grid conditions. Trans. China Electrotech. Soc. 2018, 33, 4813–4822. [Google Scholar]
- Sgrò, D.; Souza, S.A.; Tofoli, F.L.; Leão, R.P.S.; Sombra, A.K.R. An integrated design approach of LCL filters based on nonlinear inductors for grid-connected inverter applications. Electr. Power Syst. Res. 2020, 186, 106389. [Google Scholar] [CrossRef]
- Pan, D.; Ruan, X.; Wang, X.; Bao, C.; Li, W. Magnetic integration of the LCL filter in Grid-connected inverters. Proc. Chin. Soc. Electr. Eng. 2013, 33, 67–75. [Google Scholar]
- Xie, W.; Liu, Y.; Wang, J.; Ji, C.; Yu, J. A delay compensation method of the grid-connected inverter with LCL filter to improve robustness of the impedance shaping control. Trans. China Electrotech. Soc. 2017, 32, 178–185. [Google Scholar]
- He, Y.; Wang, X.; Ruan, X.; Pan, D.; Xu, X.; Liu, F. Capacitor-Current Proportional-Integral Positive Feedback Active Damping for LCL-Type Grid-Connected Inverter to Achieve High Robustness Against Grid Impedance Variation. IEEE Trans. Power Electron. 2019, 34, 12423–12436. [Google Scholar] [CrossRef]
- He, S.; Xiong, J.; Wang, Z.; Lin, S. Robust AD for LCL-type grid-connected inverter with capacitor current quasi-integral feedback. IET Power Electron. 2020, 13, 1332–1342. [Google Scholar] [CrossRef]
- Li, X.; Fang, J.; Tang, Y.; Wu, X.; Geng, Y. Capacitor-Voltage Feedforward with Full Delay Compensation to Improve Weak Grids Adaptability of LCL-Filtered Grid-Connected Converters for Distributed Generation Systems. IEEE Trans. Power Electron. 2018, 33, 749–764. [Google Scholar] [CrossRef]
- Semasa, M.; Kato, T.; Inoue, K. A simple and effective time delay compensation method for grid-connected inverter with an LCL filter: Application to active damping method. In Proceedings of the 2017 IEEE 18th Workshop on Control and Modeling for Power Electronics (COMPEL), Stanford, CA, USA, 9–12 July 2017; pp. 1–7. [Google Scholar]
- Liu, T.; Liu, Z.; Liu, J.; Tu, Y.; Liu, Z. An improved capacitor-current-feedback active damping for LCL resonance in grid-connected inverters. In Proceedings of the 2017 IEEE 3rd International Future Energy Electronics Conference and ECCE Asia (IFEEC 2017—ECCE Asia), Kaohsiung, Taiwan, 3–7 June 2017; pp. 2111–2116. [Google Scholar]
- Lu, M.; Wang, X.; Loh, P.C.; Blaabjerg, F.; Dragicevic, T. Graphical Evaluation of Time-Delay Compensation Techniques for Digitally Controlled Converters. IEEE Trans. Power Electron. 2018, 33, 2601–2614. [Google Scholar] [CrossRef]
- Chen, C.; Xiong, J.; Wan, Z.; Lei, J.; Zhang, K. A Time Delay Compensation Method Based on Area Equivalence for Active Damping of an LCL -Type Converter. IEEE Trans. Power Electron. 2017, 32, 762–772. [Google Scholar] [CrossRef]
- Yang, L.; Yang, J. A Robust Dual-Loop Current Control Method with a Delay-Compensation Control Link for LCL-Type Shunt Active Power Filters. IEEE Trans. Power Electron. 2018, 34, 6183–6199. [Google Scholar] [CrossRef]
- Wang, L.; Sun, P.; Wang, J.; Zhu, K.; Xue, T.; Zhang, Y. A Delay Compensation Method to Improve the Current Control Performance of the LCL-Type Grid-Connected Inverter. In Proceedings of the 2019 IEEE 10th International Symposium on Power Electronics for Distributed Generation Systems (PEDG), Xi’an, China, 3–6 June 2019; pp. 134–141. [Google Scholar]
- Liu, J.; Zhou, L.; Molinas, M. Damping region extension for digitally controlled LCL-type grid-connected inverter with capacitor-current feedback. IET Power Electron. 2018, 11, 1974–1982. [Google Scholar] [CrossRef] [Green Version]
- Xu, J.; Xie, S.; Zhang, B.; Qian, Q. Robust Grid Current Control With Impedance-Phase Shaping for LCL-Filtered Inverters in Weak and Distorted Grid. IEEE Trans. Power Electron. 2018, 33, 10240–10250. [Google Scholar] [CrossRef]
- Pan, D.; Ruan, X.; Wang, X. Direct Realization of Digital Differentiators in Discrete Domain for Active Damping of LCL -Type Grid-Connected Inverter. IEEE Trans. Power Electron. 2018, 33, 8461–8473. [Google Scholar] [CrossRef] [Green Version]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Frequency Range | (0, 1/6fs) | (1/6fs, 1/3fs) | (1/3fs, 1/2fs) |
|---|---|---|---|
| cos(1.5ωTs) | positive | negative | negative |
| sin(1.5ωTs) | positive | positive | negative |
| Parameter | Symbol | Value |
|---|---|---|
| DC voltage | UDC | 500 V |
| Inverter side filter inductance | L1 | 2 mH |
| Filter capacitor | C | 9.4 μF |
| Grid-side filter inductance | L2 | 0.4 mH |
| Output active power | Po | 4950 W |
| Phase voltage amplitude | ug | 110 V |
| Switching/sampling frequency | fs | 20 kHz |
| Compensation coefficient | n | 1 |
| Active damping coefficient | Hi | 0.04 |
| Current loop proportional coefficient | KP | 0.023 |
| Current loop integral coefficient | KI | 65.5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, X.; Wang, S.; Wang, S.; Yang, C.; Zhao, X. A Digital Delay Compensation Method to Improve the Stability of LCL Grid-Connected Inverters. Energies 2021, 14, 2730. https://doi.org/10.3390/en14092730
Wang X, Wang S, Wang S, Yang C, Zhao X. A Digital Delay Compensation Method to Improve the Stability of LCL Grid-Connected Inverters. Energies. 2021; 14(9):2730. https://doi.org/10.3390/en14092730
Chicago/Turabian StyleWang, Xiaohuan, Senfeng Wang, Shuguang Wang, Chunlai Yang, and Xiaojun Zhao. 2021. "A Digital Delay Compensation Method to Improve the Stability of LCL Grid-Connected Inverters" Energies 14, no. 9: 2730. https://doi.org/10.3390/en14092730