
A Procedure to Calculate First-Order Wave-Structure Interaction Loads in Wave Farms and Other Multi-Body Structures Subjected to Inhomogeneous Waves


Abstract
:1. Introduction
1.1. Array Interaction in Large Floating Structures
1.2. Array Interaction in Offshore Wave Energy Farms
1.3. The Direct Method
1.4. Matrix Methods
1.5. Inhomogeneous Wave Environment Conditions
1.6. The Present Study
2. Methodology
2.1. The Direct Method
2.2. The Interaction Problem
2.3. Excitation Forces and Hydrodynamic Coefficients
2.4. Diffraction and Force Transfer Matrices from Standard Diffraction Codes
2.5. Practical Computational Procedures
- Impose an arbitrary directional wave variance spectrum at the location of each body including both amplitude and phase information.
- Optional: Define a reference location (e.g., the location of one of the bodies).
- Produce a 3-dimensional array with shape , where is the number of bodies, is the number of frequencies, and is the number of wave headings in the entire spectral range of all bodies.
- 4.
- Compute the added mass, damping coefficients, and hydrostatic stiffness matrix (if motions are to be calculated) for each unique geometry in isolation. The hydrodynamic coefficients are used in Equation (22).
- 5.
- Compute the excitation forces on each unique geometry in isolation considering a set of at least 2M + 1 (preferably more) incident wave headings covering the range 0 to and the frequencies. The forces are used in Equation (26) to determine the force transfer matrix .
- 6.
- Compute the diffraction potential at a control surface surrounding each unique body geometry in isolation for a set of at least 2M + 1 (preferably more) incident wave headings covering the range 0 to and the frequencies. The potential distribution at the control surface is used in Equation (27) to determine , which then feeds Equation (25) to determine the diffraction transfer matrix .
- 7.
- Compute the radiation potential for each motion mode of each unique body geometry at the same control surface mentioned in the previous point. The potential distribution at the control surface is used in Equation (28) to determine to be applied in Equation (22).
- 8.
- For each frequency :
- Solve the system of linear equations in Equation (19) to determine the diffraction for each body and for each of the wave headings. Here, the corresponding element of needs to be used for each .
- Compute the excitation forces for each body and for each of the wave headings using Equation (21).
- The excitation force on each body is the sum of the excitation forces applied on the body from all the angles.
- 9.
- Solve the system of linear equations in Equation (19) with the substitution in Equation (20) to determine the radiation for each jth body and then compute the full multi-body added mass and damping coefficient matrices using Equations (22)–(24).
3. Results
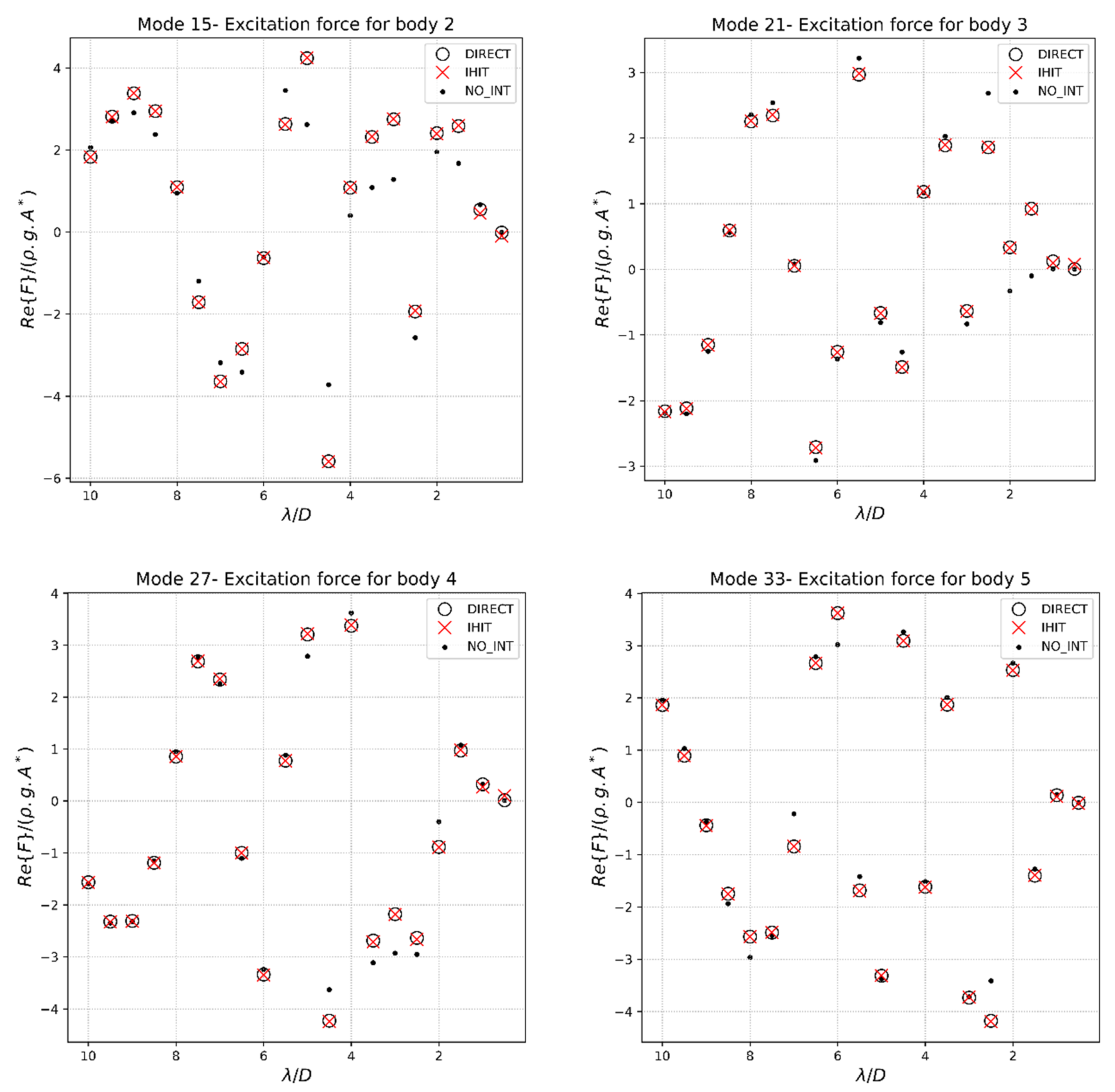
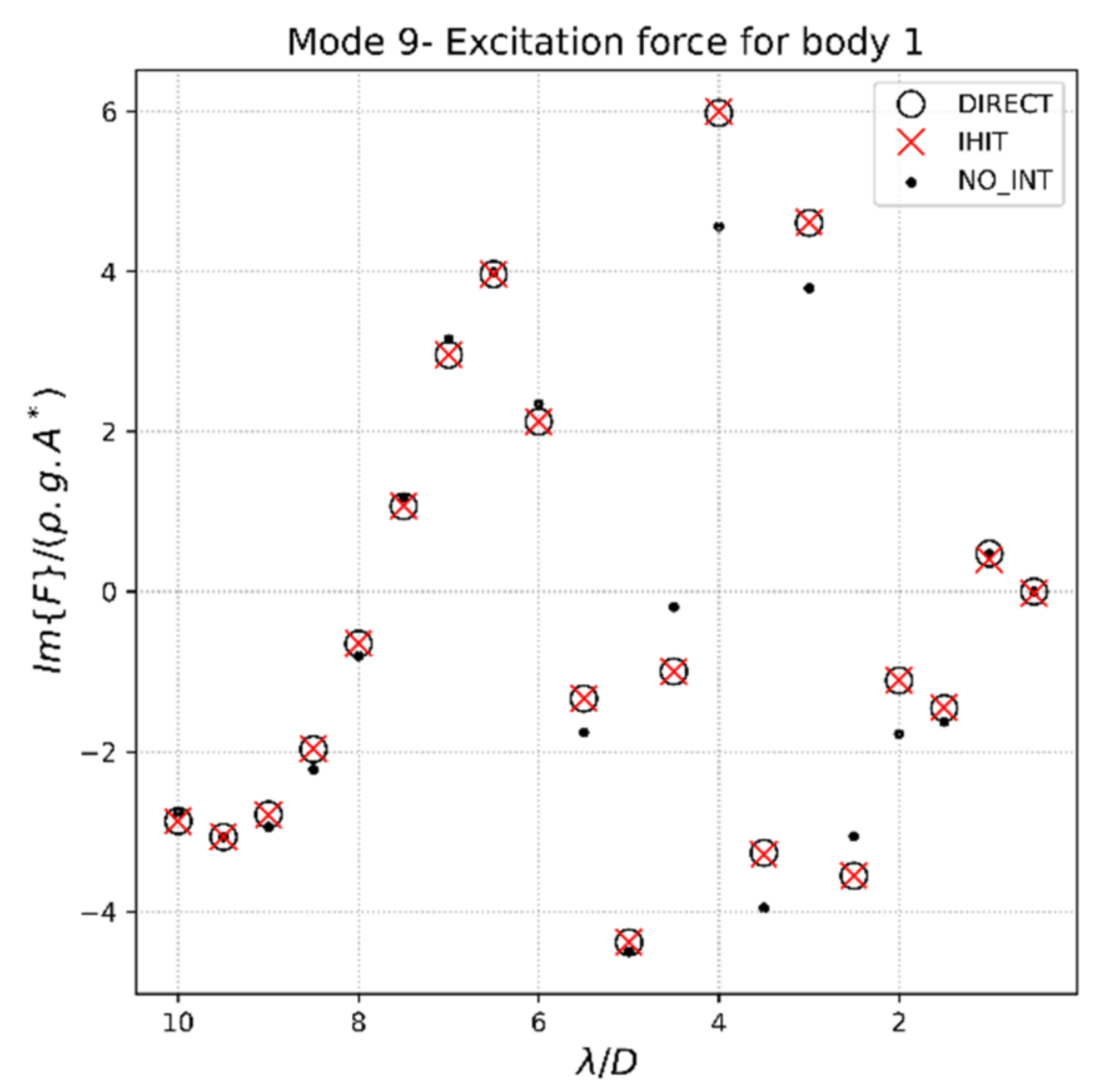
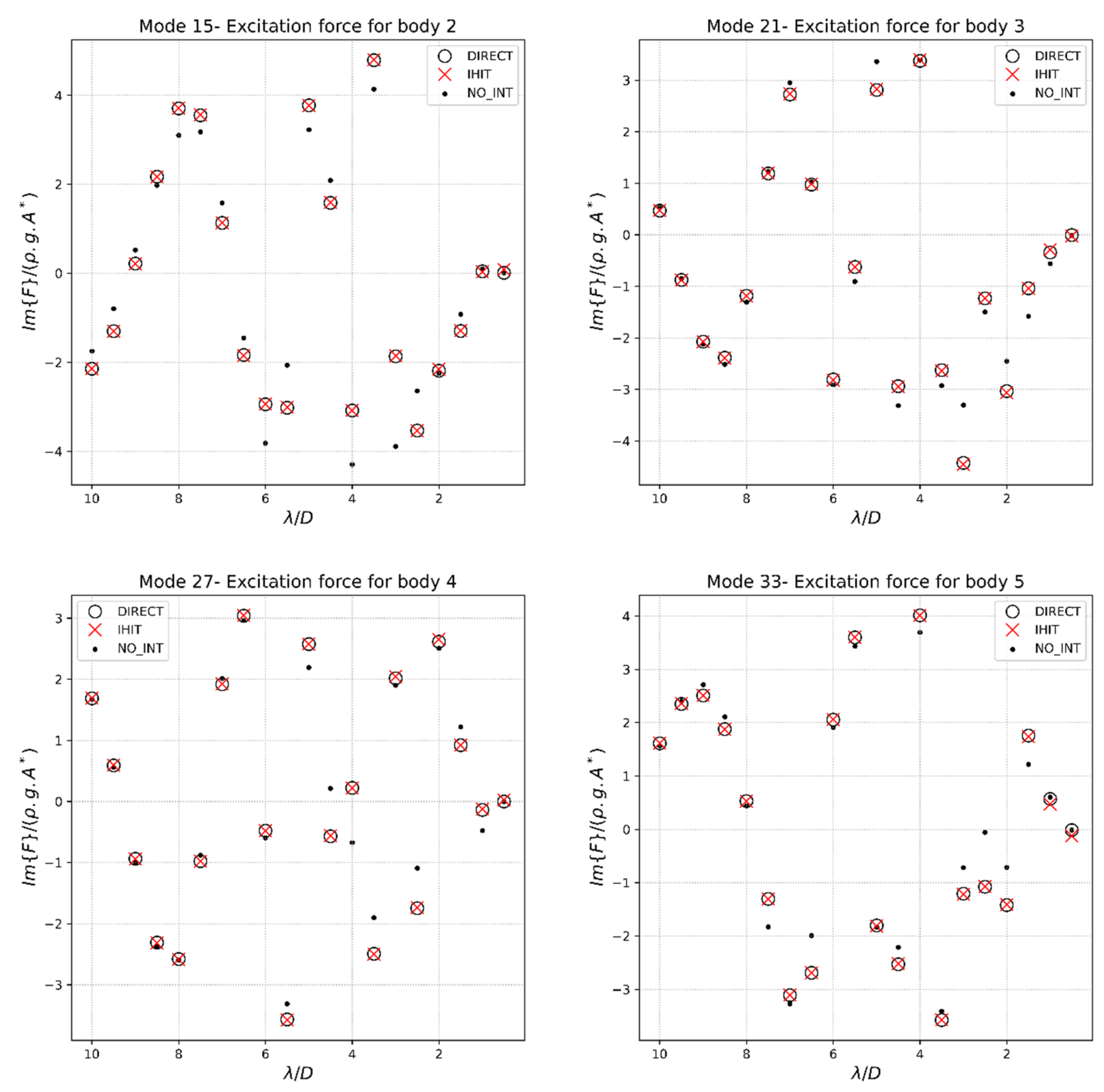
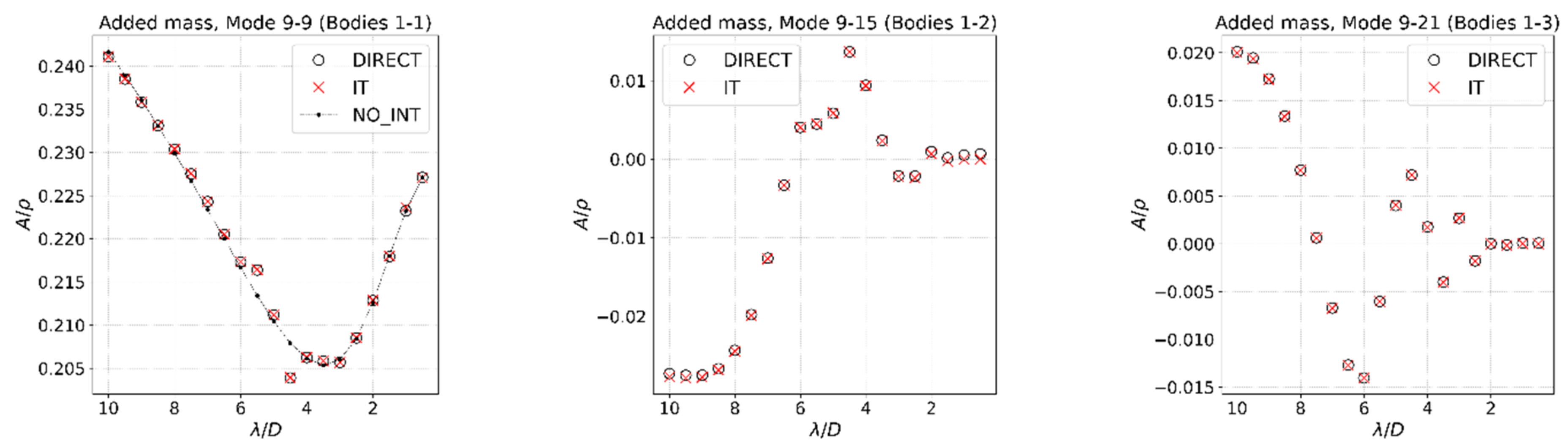
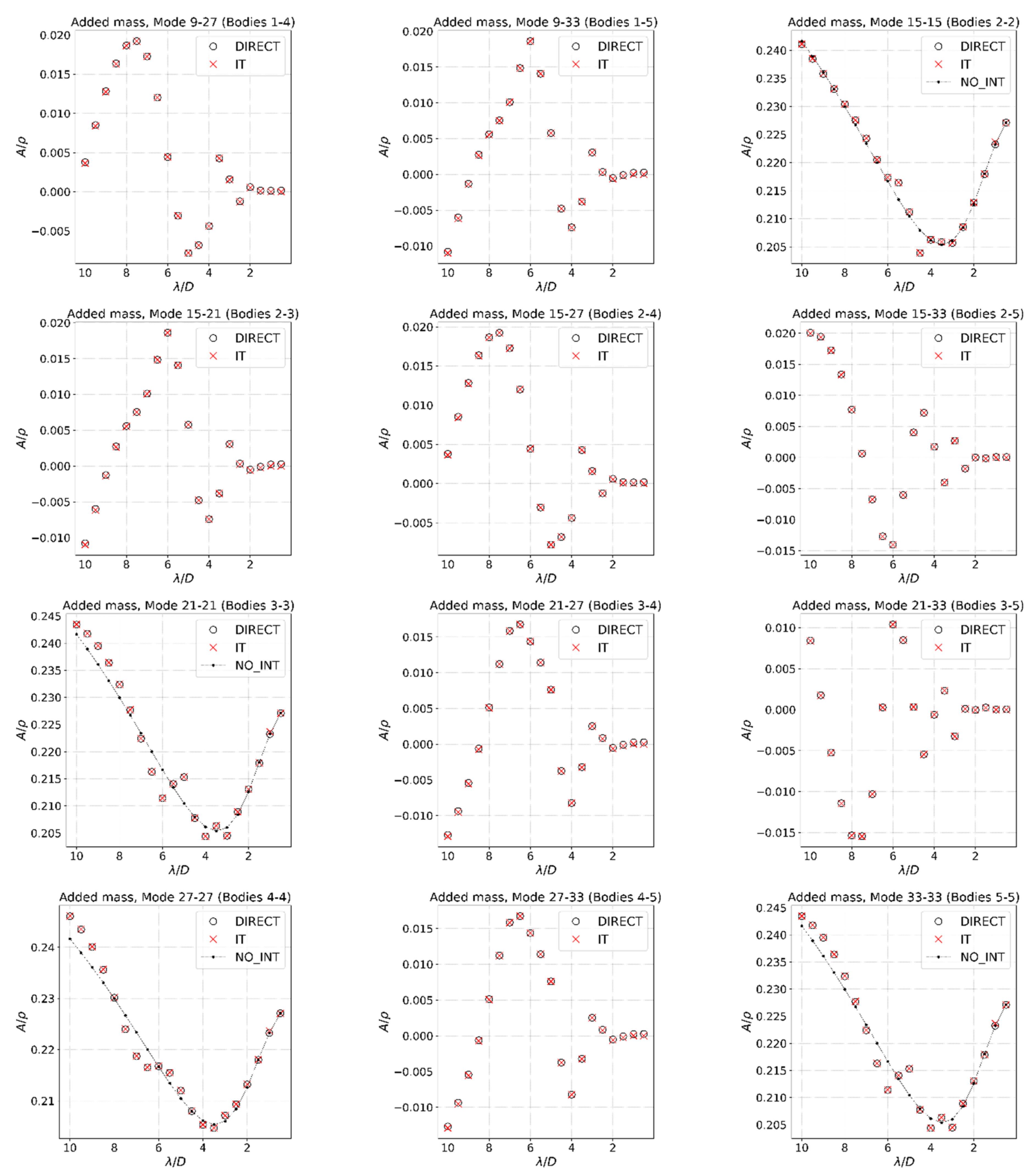
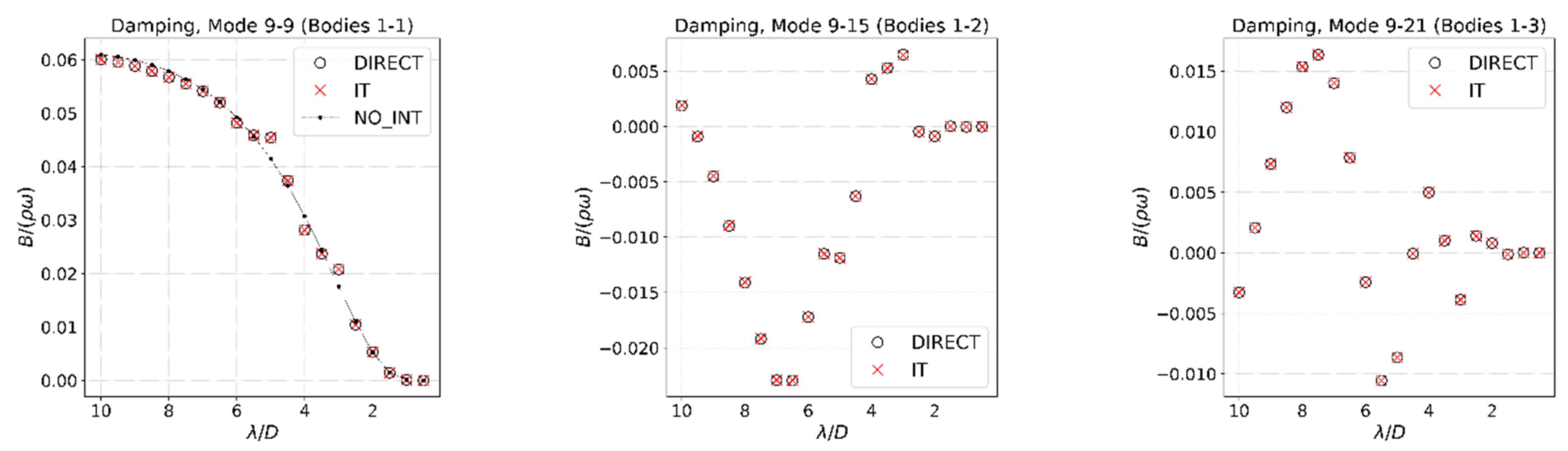
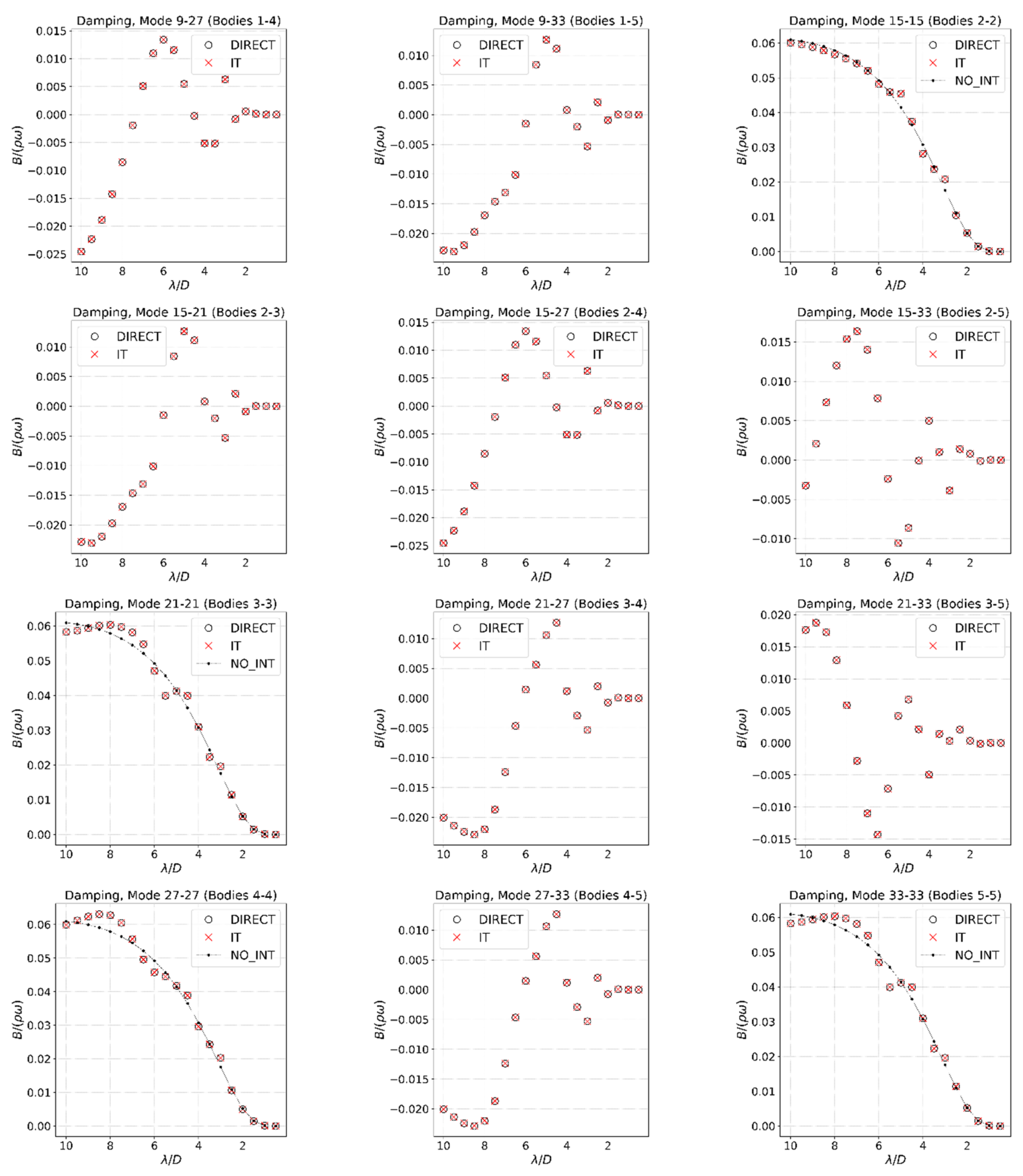
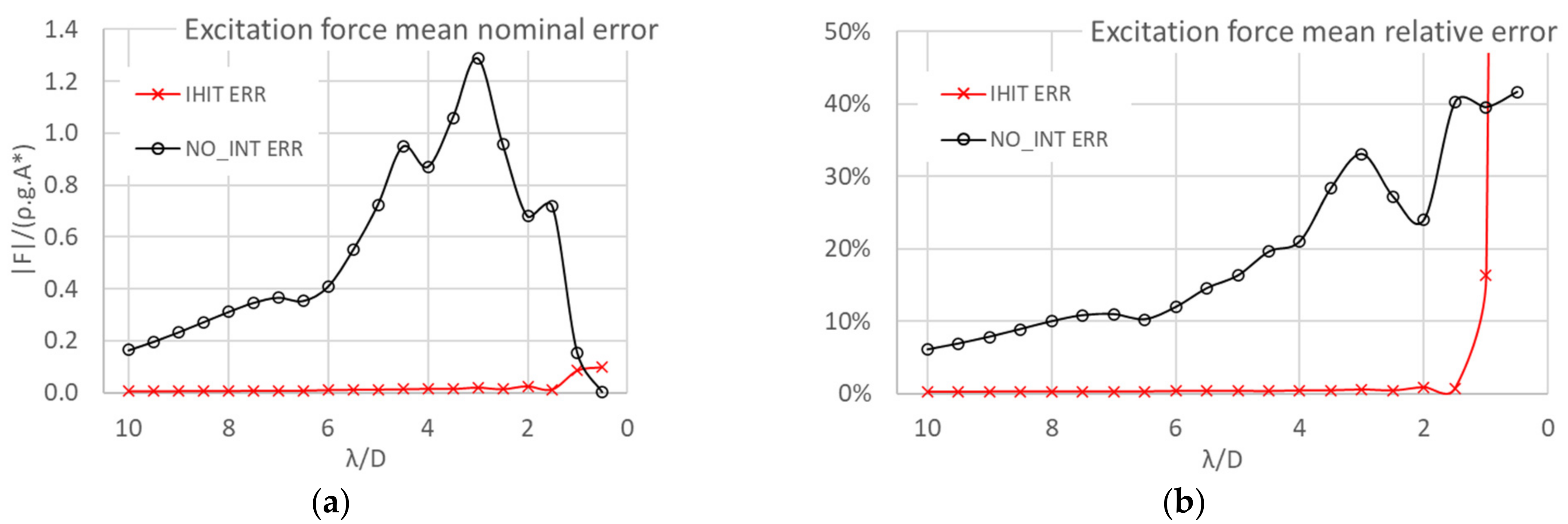
3.1. Verification
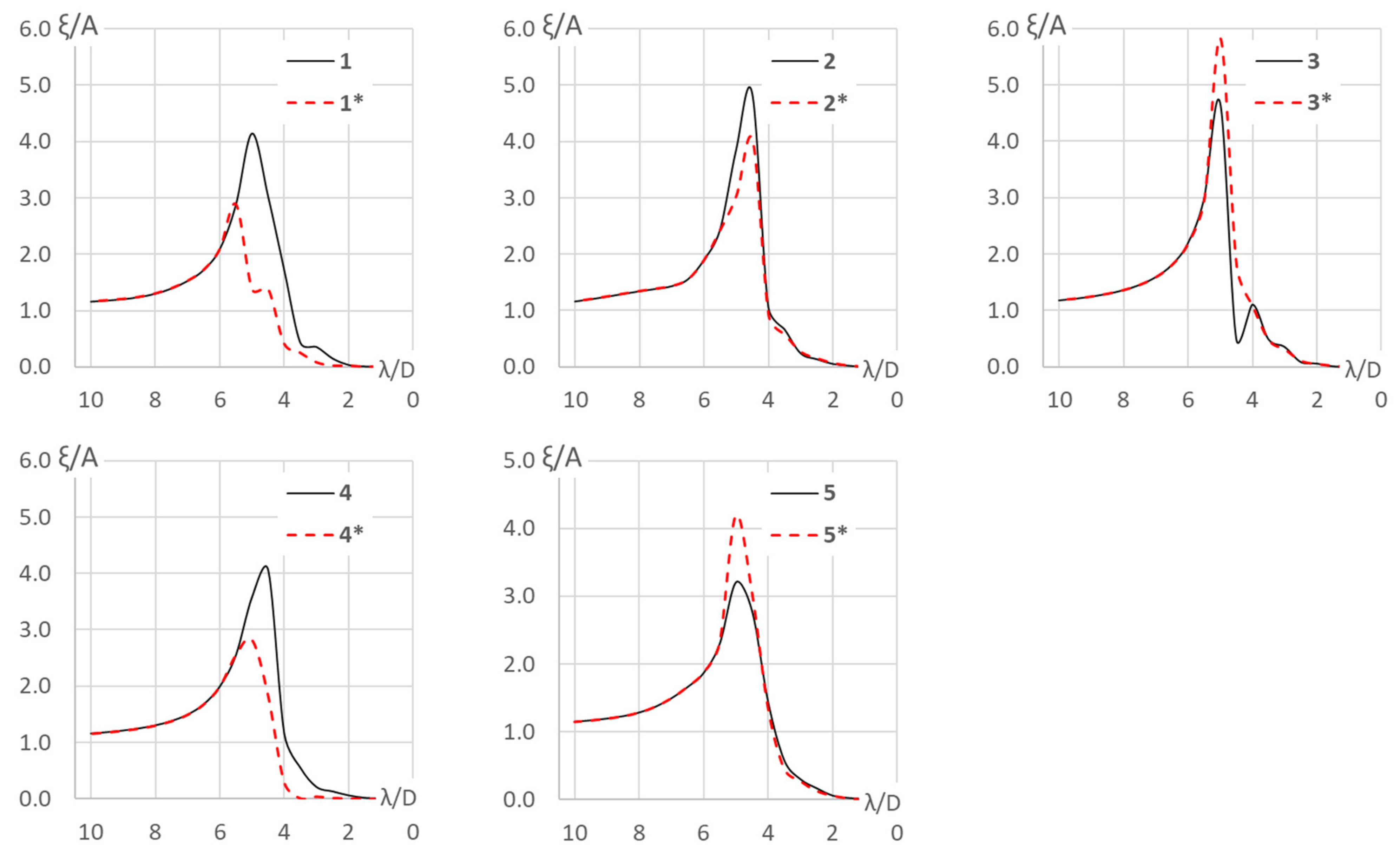
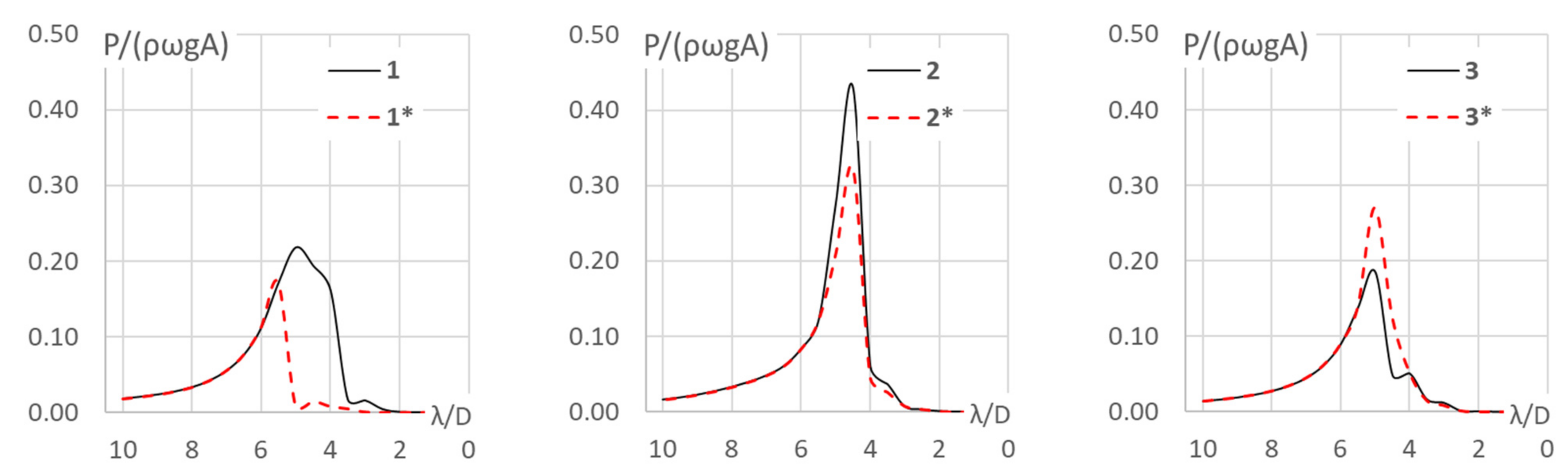
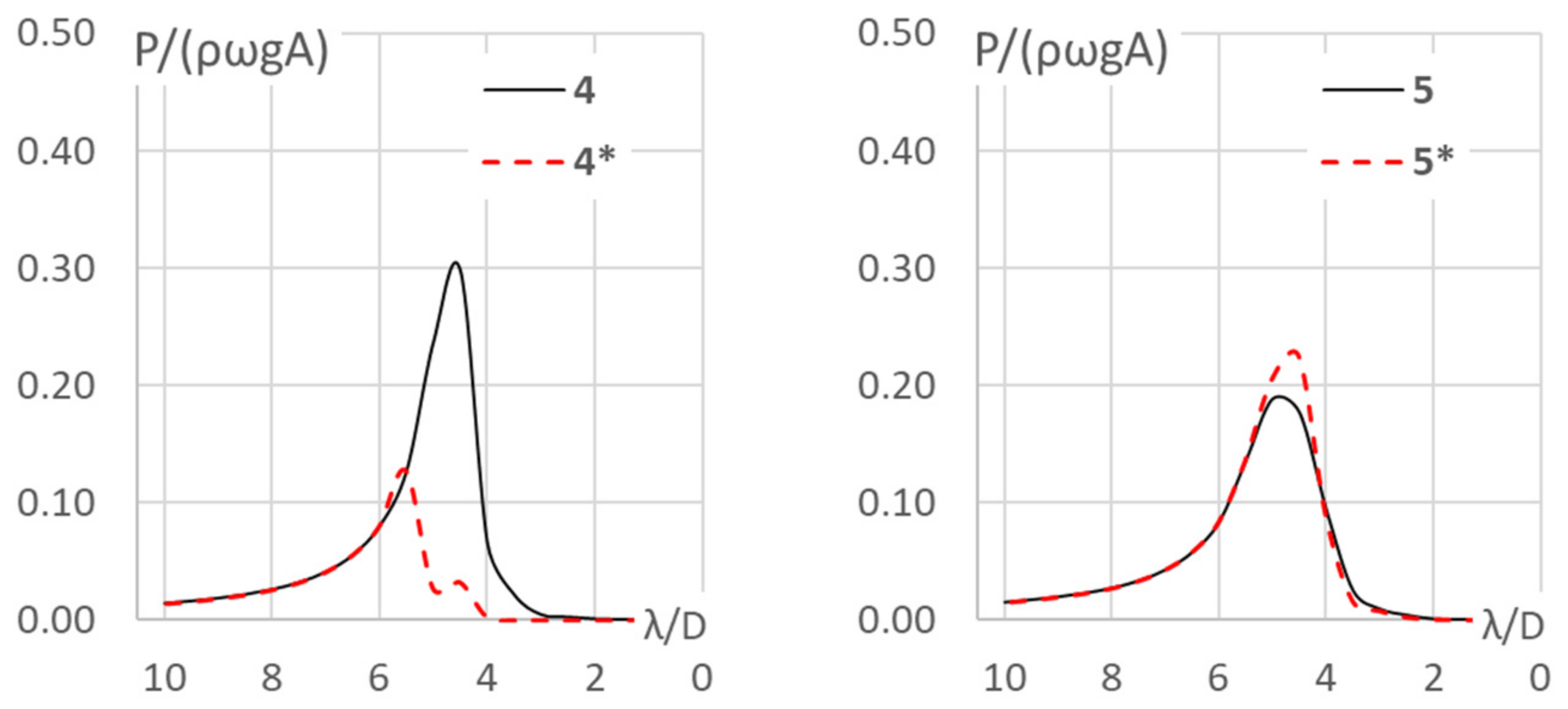
3.2. Frequency Inhomogeneity in a WEC Farm
4. Discussion
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Rodrigues, J.M.; Økland, O.; Fonseca, N.; Leira, B.; Alsos, H.S.; Abrahamsen, B.C.; Aksnes, V.; Lie, H. Design and verification of large floating coastal structures: Floating bridges for fjord crossings. In Proceedings of the Thirtieth International Ocean and Polar Engineering Conference, Shanghai, China, 11–16 October 2020. [Google Scholar]
- Fonseca, N.; Chi, Z.; Rodrigues, J.M.; Ren, N.X.; Hellan, O.; Magee, A.R. Hydrodynamic model tests with a large floating hydrocarbon storage facility. In Proceedings of the ASME 38th International Conference on Ocean, Offshore and Arctic Engineering, Glasgow, Scotland, 9–14 June 2019; Volume 6. [Google Scholar]
- Kagemoto, H.; Fujino, M.; Murai, M. Theoretical and experimental predictions of the hydroelastic response of a very large floating structure in waves. Appl. Ocean Res. 1998, 20, 135–144. [Google Scholar] [CrossRef]
- Kagemoto, H.; Yue, D.K.P. Hydrodynamic interaction analyses of very large floating structures. Mar. Struct. 1993, 6, 295–322. [Google Scholar] [CrossRef]
- Folley, M.; Whittaker, T.J.T. The effect of sub-optimal control and the spectral wave climate on the performance of wave energy converter arrays. Appl. Ocean Res. 2009, 31, 260–266. [Google Scholar] [CrossRef]
- Fitzgerald, C.; Thomas, G. A preliminary study on the optimal formation of an array of wave power devices. In Proceedings of the 7th European Wave and Tidal Energy Conference, Porto, Portugal, 11–13 September 2007. [Google Scholar]
- WAMIT INC. Wamit User Manual, v7.4.; WAMIT INC: Chestnut Hill, MA, USA, 2020. [Google Scholar]
- Babarit, A.; Delhommeau, G. Theoretical and numerical aspects of the open source bem solver nemoh. In Proceedings of the 11th European Wave and Tidal Energy Conference (EWTEC2015), Nantes, France, 6–11 September 2015. [Google Scholar]
- BUREAU VERITAS. 2021. Available online: https://marine-offshore.Bureauveritas.Com/hydrostar-software-powerful-hydrodynamic (accessed on 20 March 2021).
- SINTEF OCEAN. 2019. Available online: https://www.Sintef.No/globalassets/sintef-ocean/factsheets/muldif.Pdf (accessed on 20 March 2021).
- SINTEF OCEAN. 2021. Available online: https://www.Sintef.No/en/software/sima/ (accessed on 20 March 2021).
- Kagemoto, H.; Yue, D.K.P. Interactions among multiple three-dimensional bodies in water waves: An exact algebraic method. J. Fluid Mech. 1986, 166, 189–209. [Google Scholar] [CrossRef]
- Yilmaz, O.; Incecik, A. Analytical solutions of the diffraction problem of a group of truncated vertical cylinders. Ocean Eng. 1998, 25, 385–394. [Google Scholar] [CrossRef]
- Linton, C.M.; McIver, P. Handbook of Mathematical Techniques for Wave/Structure Interactions; Chapman & Hall/CRC: Boca Raton, FL, USA, 2001; p. 304. [Google Scholar]
- Child, B.F.M.; Venugopal, V. Optimal configurations of wave energy device arrays. Ocean Eng. 2010, 37, 1402–1417. [Google Scholar] [CrossRef]
- Yoshida, K.; Goo, J.-S. A numerical method for huge semisubmersible responses in waves. Trans. Soc. Naval Archit. Mar. Eng. 1990, 98, 365–387. [Google Scholar]
- Chakrabarti, S. Hydrodynamic interaction forces on multi-moduled structures. Ocean Eng. 2000, 27, 1037–1063. [Google Scholar] [CrossRef]
- McNatt, J.C.; Venugopal, V.; Forehand, D. The cylindrical wave field of wave energy converters. Int. J. Mar. Energy 2013, 3, e26–e39. [Google Scholar] [CrossRef]
- McNatt, J.C.; Venugopal, V.; Forehand, D. A novel method for deriving the diffraction transfer matrix and its application to multi-body interactions in water waves. Ocean Eng. 2015, 94, 173–185. [Google Scholar] [CrossRef] [Green Version]
- Flavia, F.F.; McNatt, C.; Rongere, F.; Babarit, A.; Clement, A.H. A numerical tool for the frequency domain simulation of large arrays of identical floating bodies in waves. Ocean Eng. 2018, 148, 299–311. [Google Scholar] [CrossRef] [Green Version]
- McNatt, J.C.; Porter, A.; Chartrand, C.; Roberts, J. The performance of a spectral wave model at predicting wave farm impacts. Energies 2020, 13, 5728. [Google Scholar] [CrossRef]
- Leira, B.J.; Dai, J. Extreme dynamic response of extended bridge structures subjected to inhomogeneous environmental loading. In Proceedings of the EURODYN 2020 XI International Conference on Structural Dynamics, Athens, Greece, 23–16 November 2020. [Google Scholar]
- Fonseca, N.; Bachynski, E.E. LFCS Review Report—Environmental Loads Methods for the Estimation of Loads on Large Floating Bridges; SINTEF Ocean: Trondheim, Norway, 2018. [Google Scholar]
- Cheng, Z.S.; Gao, Z.; Moan, T. Wave load effect analysis of a floating bridge in a fjord considering inhomogeneous wave conditions. Eng. Struct. 2018, 163, 197–214. [Google Scholar] [CrossRef]
- Xiang, X.; Viuff, T.; Leira, B.; Oiseth, O. Impact of hydrodynamic interaction between pontoons on global responses of a long floating bridge under wind waves. In Proceedings of the ASME 37th International Conference on Ocean, Offshore and Arctic Engineering, Madrid, Spain, 17–22 June 2018; Volume 7a. [Google Scholar]
- Belibassakis, K.; Bonovas, M.; Rusu, E. A novel method for estimating wave energy converter performance in variable bathymetry regions and applications. Energies 2018, 11, 2092. [Google Scholar] [CrossRef] [Green Version]
- Dai, J.; Leira, B.J.; Moan, T.; Kvittem, M.I. Inhomogeneous wave load effects on a long, straight and side-anchored floating pontoon bridge. Mar. Struct. 2020, 72, 102763. [Google Scholar] [CrossRef]
- Abramowitz, M.; Stegun, I.A. Handbook of Mathematical Functions with Formulas, Graphs, and Mathematical Tables; U.S. Department of Commerce: Washington, DC, USA, 1964; 1046p.
- McNatt, C. Mwave. 2014. Available online: https://github.com/cmcnatt/mwave (accessed on 20 March 2021).
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| λ/D | |||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| m | deg | deg | - | deg | deg | - | deg | deg | - | deg | deg | - | deg | deg | |
| 0.5 | 1.67 × 10−2 | 49.73 | 18 | 0.922 | 112.33 | 36 | 0.767 | –52.89 | 36 | 0.786 | –119.88 | 18 | 0.852 | –23.37 | 0 |
| 1.0 | 1.14 × 10−2 | –0.68 | 18 | 0.922 | 30.61 | 36 | 0.767 | 127.98 | 36 | 0.786 | 94.49 | 18 | 0.852 | –37.25 | 0 |
| 1.5 | 7.83 × 10−3 | –136.46 | 18 | 0.922 | 124.38 | 36 | 0.767 | –170.73 | 36 | 0.786 | 46.95 | 18 | 0.852 | –40.87 | 0 |
| 2.0 | 5.72 × 10−3 | 155.96 | 18 | 0.922 | 171.58 | 36 | 0.767 | –139.77 | 36 | 0.786 | 23.48 | 18 | 0.852 | 137.63 | 0 |
| 2.5 | 4.39 × 10−3 | –172.44 | 18 | 0.922 | –87.95 | 36 | 0.767 | 166.94 | 36 | 0.786 | –62.45 | 18 | 0.853 | –43.12 | 0 |
| 3.0 | 3.50 × 10−3 | 88.70 | 18 | 0.922 | –140.89 | 36 | 0.767 | –108.51 | 36 | 0.786 | 0.33 | 18 | 0.852 | –43.55 | 0 |
| 3.5 | 2.88 × 10−3 | –84.68 | 18 | 0.922 | 78.47 | 36 | 0.767 | –150.93 | 36 | 0.786 | –57.63 | 18 | 0.852 | –146.66 | 0 |
| 4.0 | 2.42 × 10−3 | 55.26 | 18 | 0.922 | –116.94 | 36 | 0.767 | 87.28 | 36 | 0.786 | 168.92 | 18 | 0.852 | 46.02 | 0 |
| 4.5 | 2.06 × 10−3 | 164.16 | 18 | 0.923 | 11.06 | 36 | 0.767 | –87.41 | 36 | 0.787 | –14.85 | 18 | 0.853 | –164.07 | 0 |
| 5.0 | 1.79 × 10−3 | –108.65 | 18 | 0.922 | 113.47 | 36 | 0.767 | 60.83 | 36 | 0.786 | 126.14 | 18 | 0.853 | –44.13 | 0 |
| 5.5 | 1.57 × 10−3 | –37.35 | 18 | 0.921 | –162.67 | 36 | 0.766 | –177.85 | 36 | 0.786 | –118.46 | 18 | 0.852 | 53.98 | 0 |
| 6.0 | 1.40 × 10−3 | 22.03 | 18 | 0.921 | –92.78 | 36 | 0.766 | –76.74 | 36 | 0.786 | –22.31 | 18 | 0.851 | 135.77 | 0 |
| 6.5 | 1.25 × 10−3 | 72.29 | 18 | 0.923 | –33.66 | 36 | 0.767 | 8.80 | 36 | 0.786 | 59.04 | 18 | 0.852 | –154.97 | 0 |
| 7.0 | 1.13 × 10−3 | 115.41 | 18 | 0.924 | 16.98 | 36 | 0.768 | 82.13 | 36 | 0.787 | 128.79 | 18 | 0.853 | –95.60 | 0 |
| 7.5 | 1.02 × 10−3 | 152.83 | 18 | 0.925 | 60.87 | 36 | 0.768 | 145.70 | 36 | 0.787 | –170.72 | 18 | 0.855 | -44.18 | 0 |
| 8.0 | 9.32 × 10−4 | –174.39 | 18 | 0.924 | 99.30 | 36 | 0.768 | –158.65 | 36 | 0.788 | –117.79 | 18 | 0.855 | 0.80 | 0 |
| 8.5 | 8.55 × 10−4 | –145.44 | 18 | 0.923 | 133.25 | 36 | 0.769 | –109.54 | 36 | 0.788 | –71.09 | 18 | 0.855 | 40.48 | 0 |
| 9.0 | 7.89 × 10−4 | –119.71 | 18 | 0.922 | 163.46 | 36 | 0.769 | –65.89 | 36 | 0.788 | –29.60 | 18 | 0.854 | 75.77 | 0 |
| 9.5 | 7.31 × 10−4 | –96.68 | 18 | 0.921 | –169.49 | 36 | 0.768 | –26.86 | 36 | 0.788 | 7.51 | 18 | 0.853 | 107.36 | 0 |
| 10.0 | 6.80 × 10−4 | –75.98 | 18 | 0.920 | –145.12 | 36 | 0.767 | 8.26 | 36 | 0.787 | 40.91 | 18 | 0.851 | 135.82 | 0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rodrigues, J.M. A Procedure to Calculate First-Order Wave-Structure Interaction Loads in Wave Farms and Other Multi-Body Structures Subjected to Inhomogeneous Waves. Energies 2021, 14, 1761. https://doi.org/10.3390/en14061761
Rodrigues JM. A Procedure to Calculate First-Order Wave-Structure Interaction Loads in Wave Farms and Other Multi-Body Structures Subjected to Inhomogeneous Waves. Energies. 2021; 14(6):1761. https://doi.org/10.3390/en14061761
Chicago/Turabian StyleRodrigues, José Miguel. 2021. "A Procedure to Calculate First-Order Wave-Structure Interaction Loads in Wave Farms and Other Multi-Body Structures Subjected to Inhomogeneous Waves" Energies 14, no. 6: 1761. https://doi.org/10.3390/en14061761