
Research on Dynamic Modeling of KF Algorithm for Detecting Distorted AC Signal


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- (1)
- We derive the discretization model from the continuous differential equation in accordance with stochastic process theory, to find the value law of fixed value of covariance under different sampling cycles.
- (2)
- We greatly improve the detecting accuracy of fundamental and harmonics components, enabling the detection results to meet the requirements of modern engineering applications of AC current and voltage signal.
2. Related Work
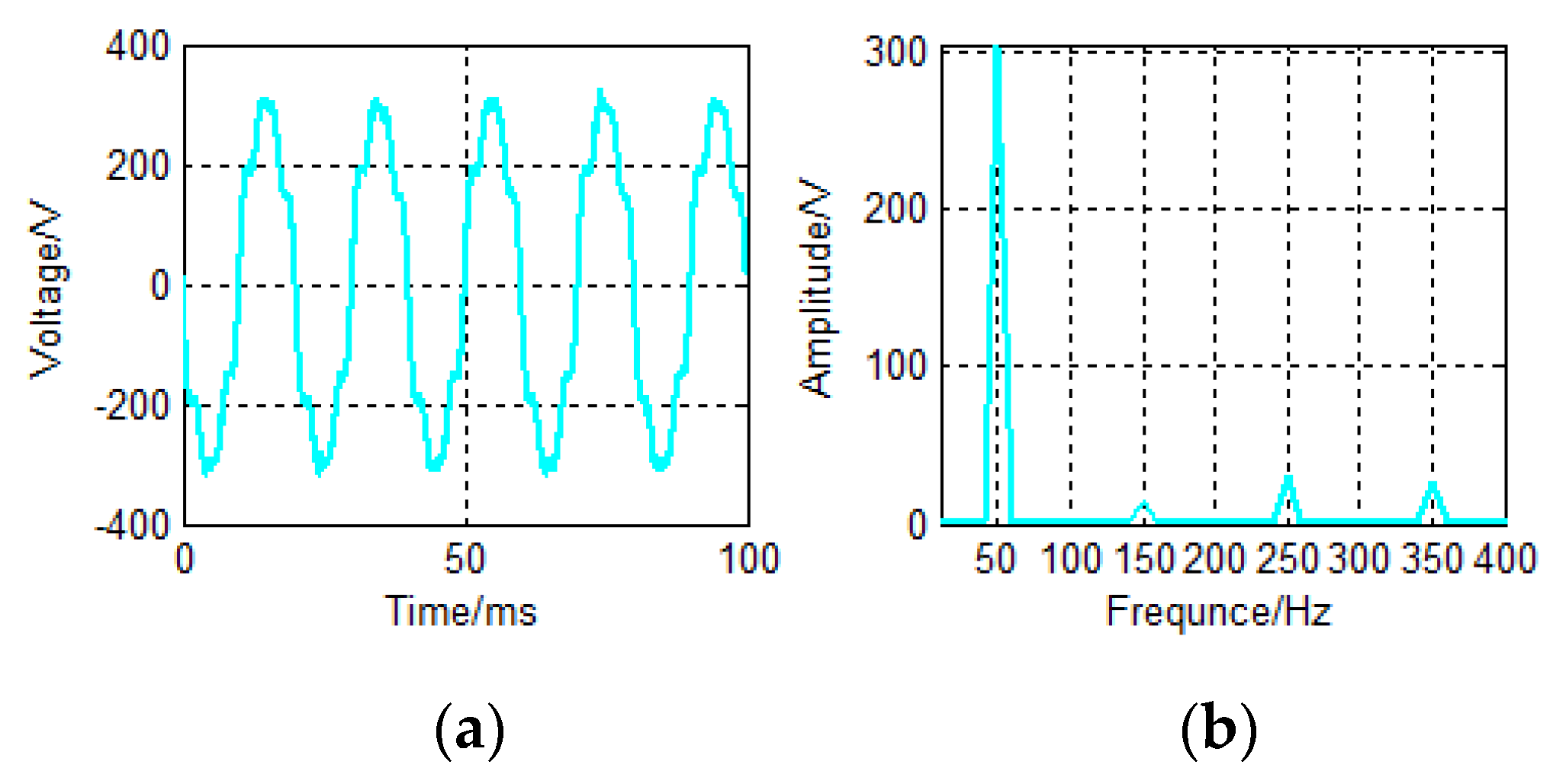
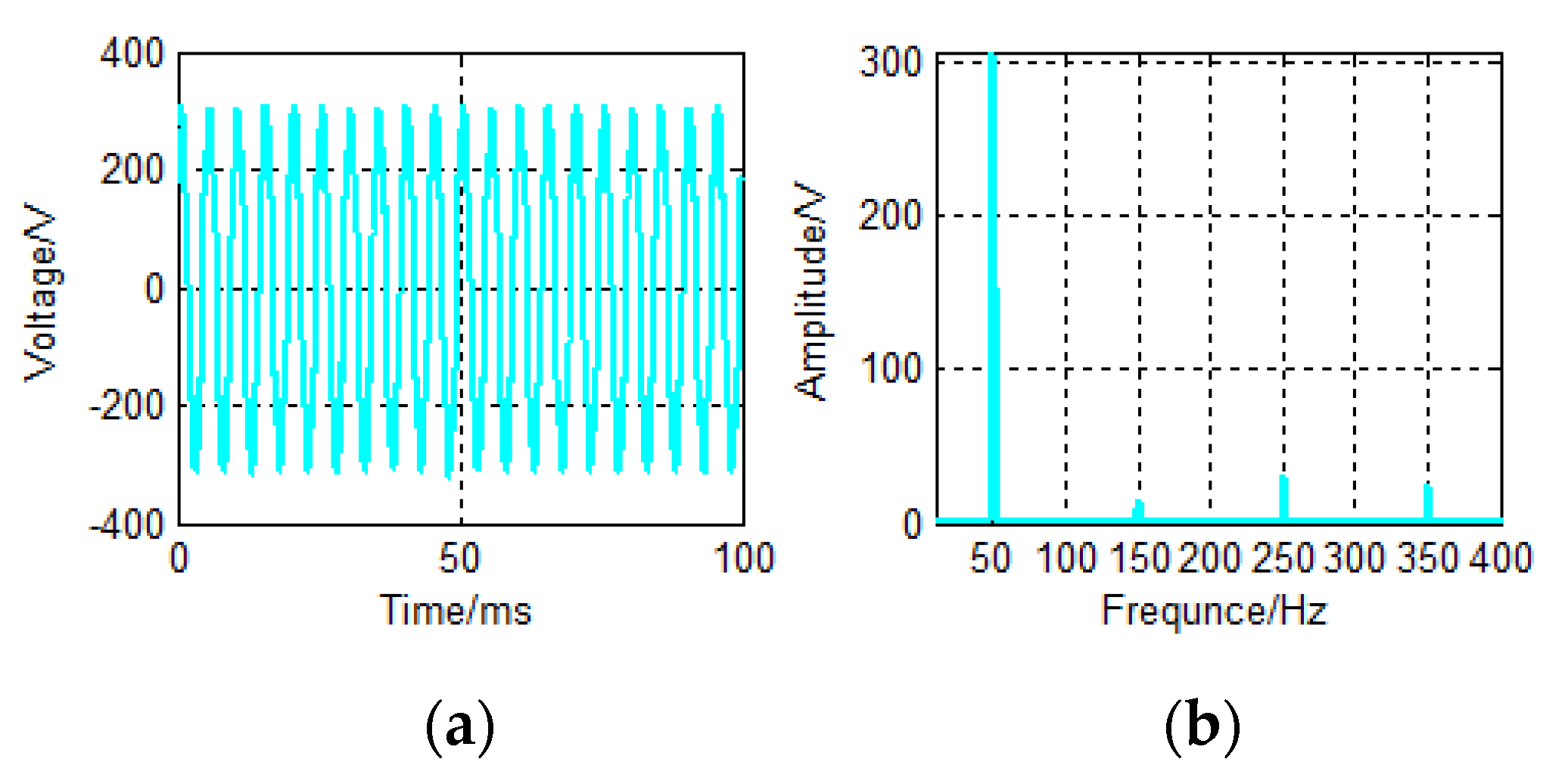
2.1. Distorted AC Signal
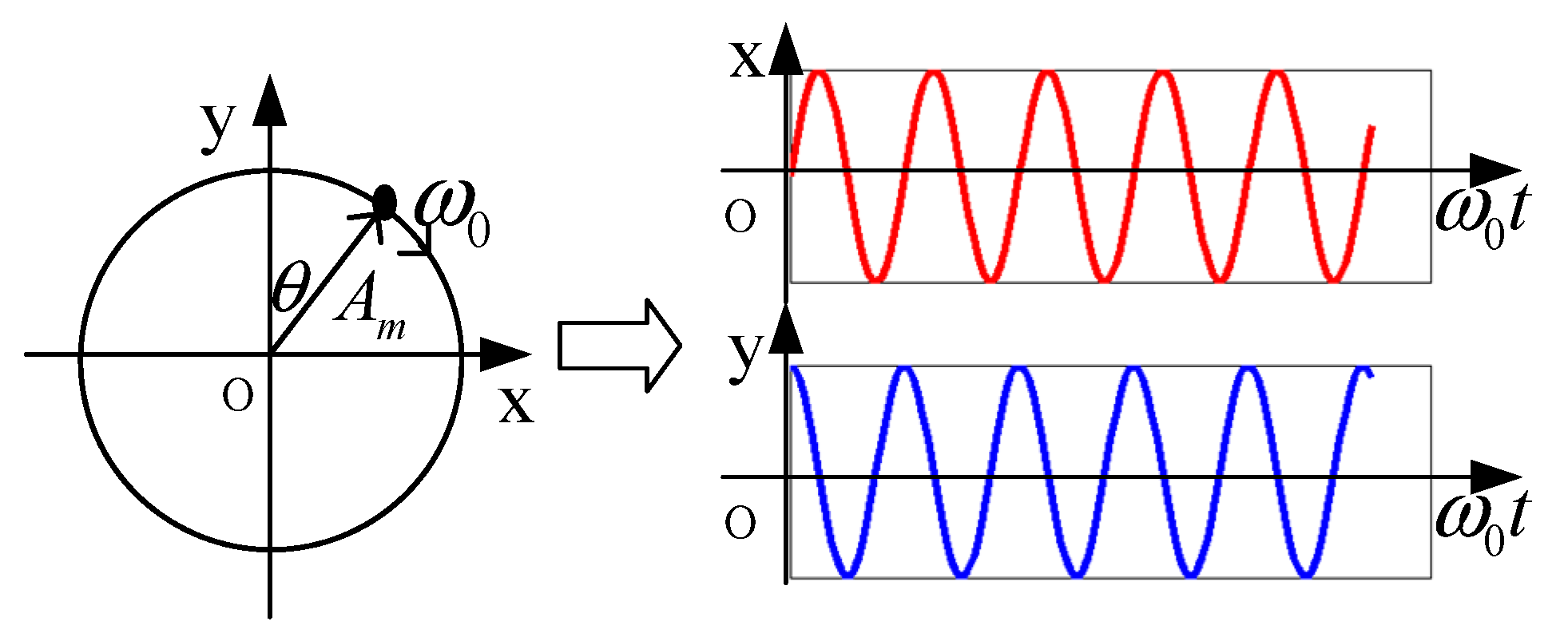
2.2. PAV Model
2.3. OV Model
2.4. PAV-KF and OV-KF Algorithm
3. PAVD-KF and OVD-KF Algorithm
3.1. PAVFIGURE
D-KF Algorithm
3.2. OVD−KF Algorithm
4. Experiment and Evaluation
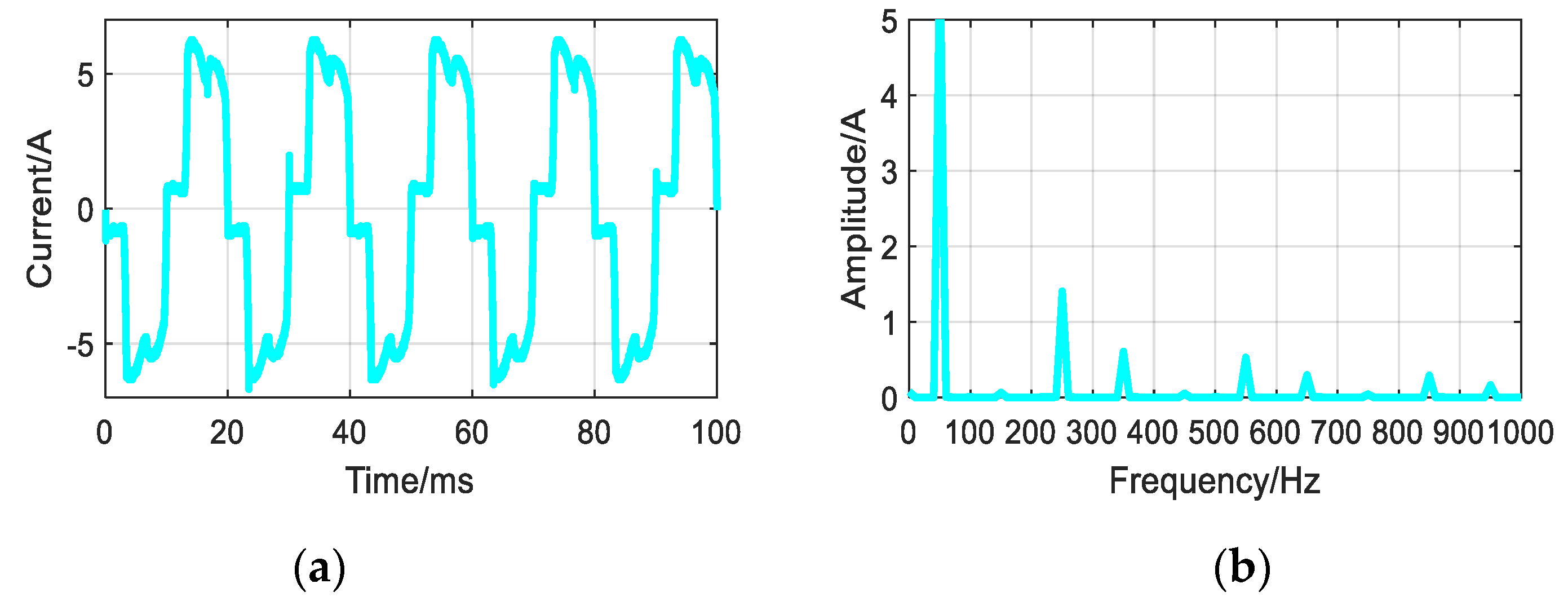
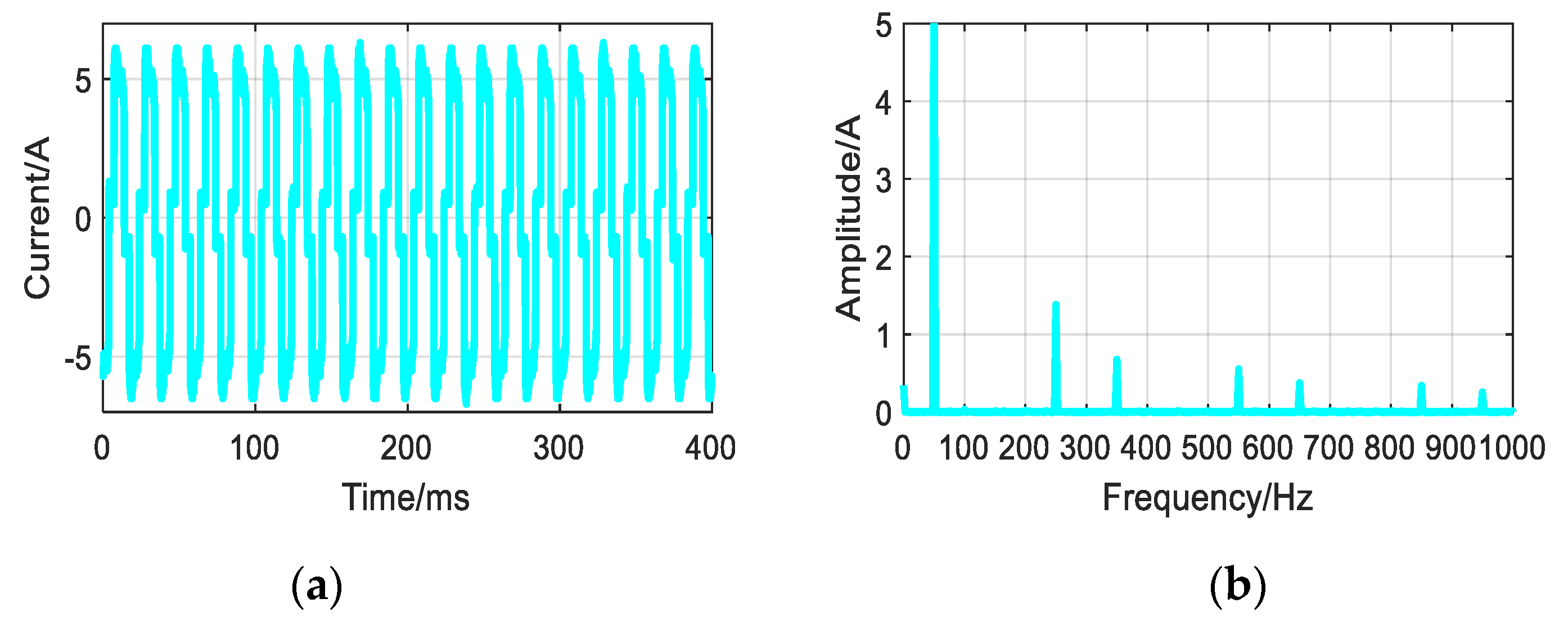
4.1. Experiment and Evaluation for AC Current Detection
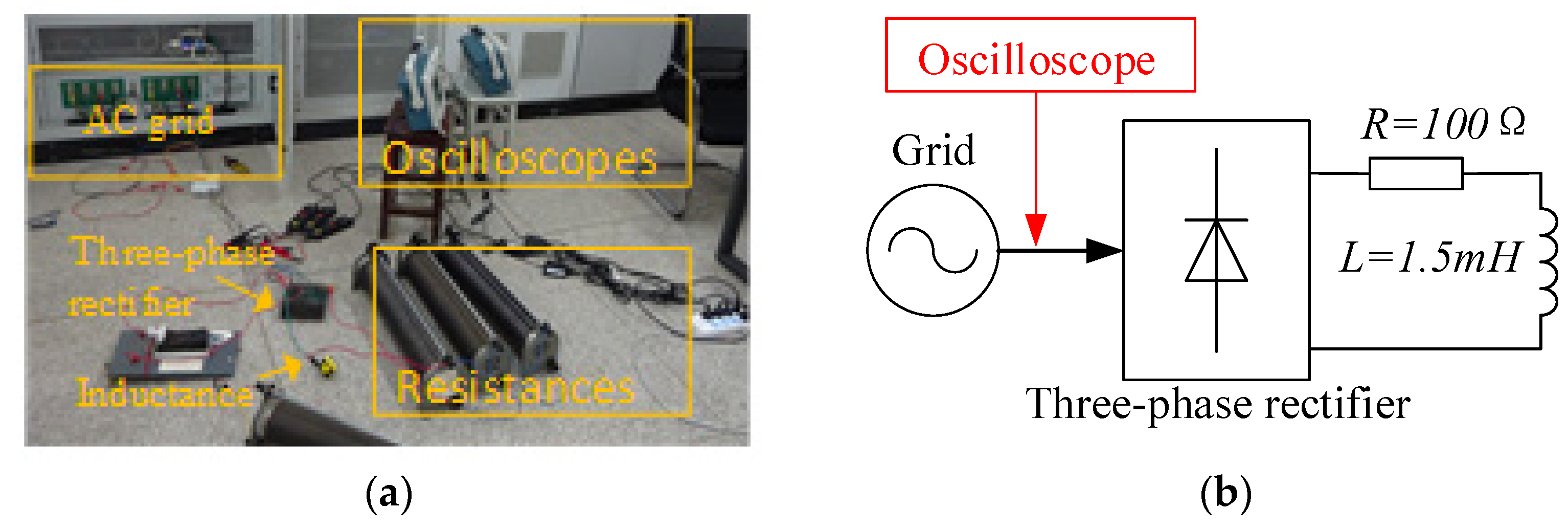
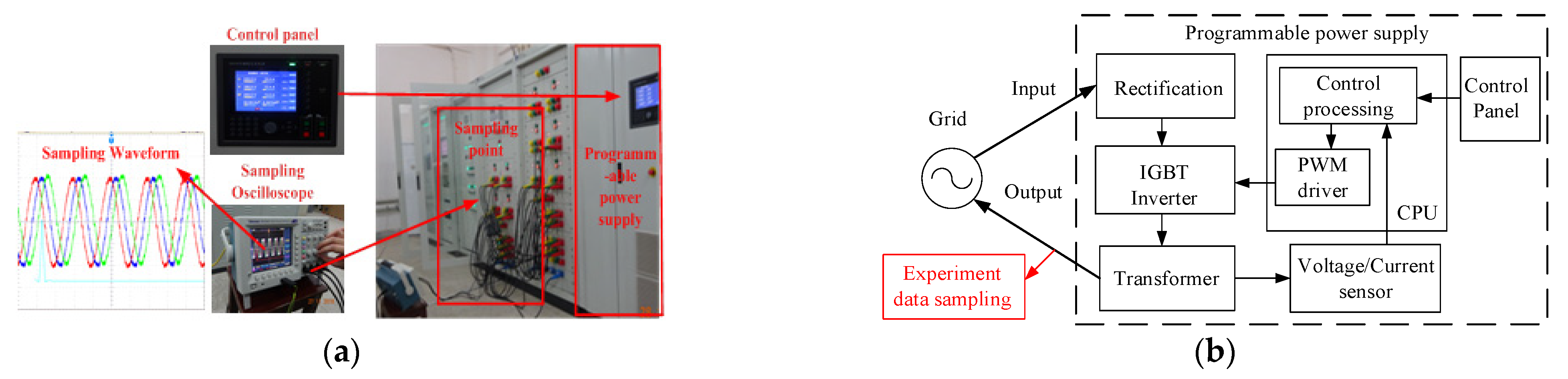
4.1.1. Experiment Settings
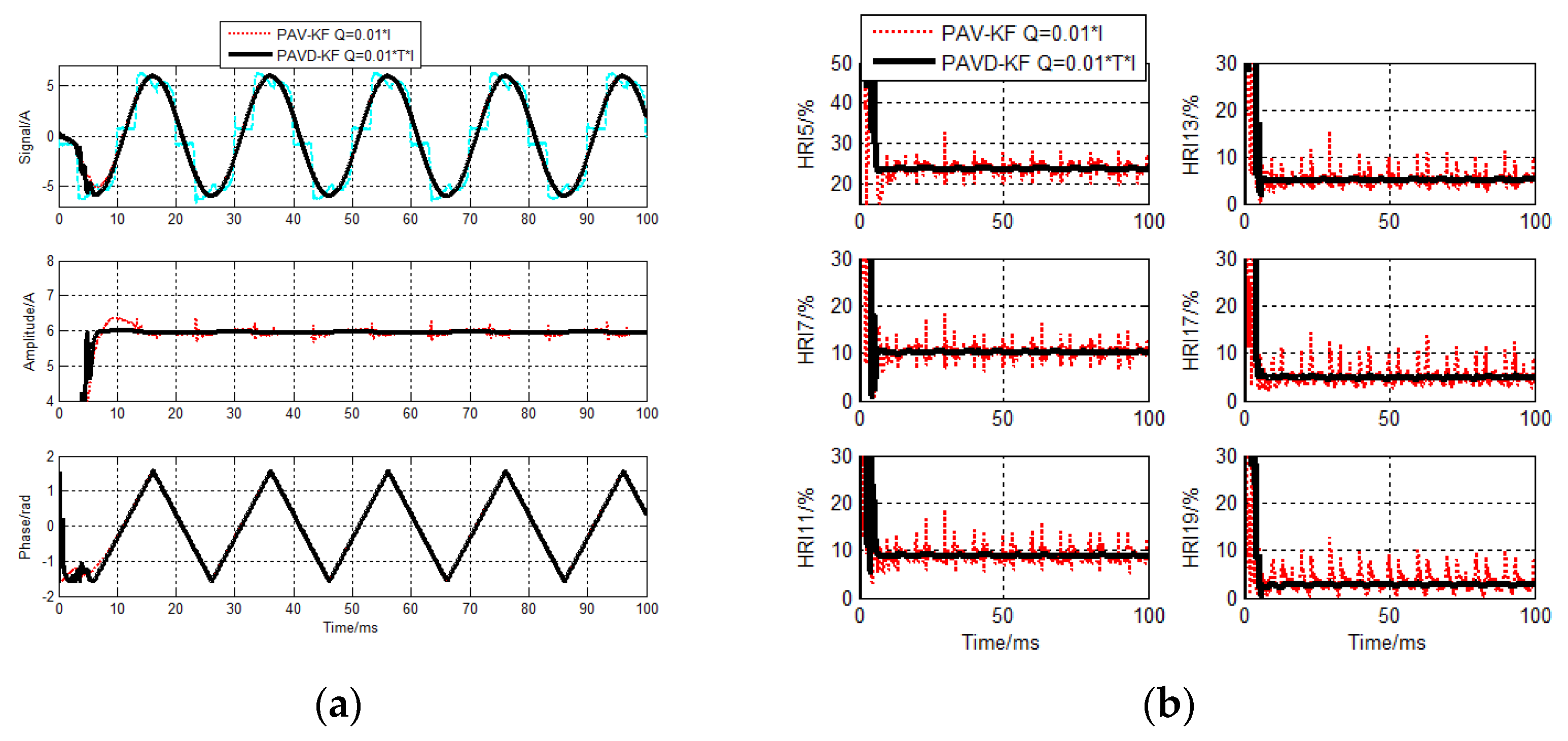
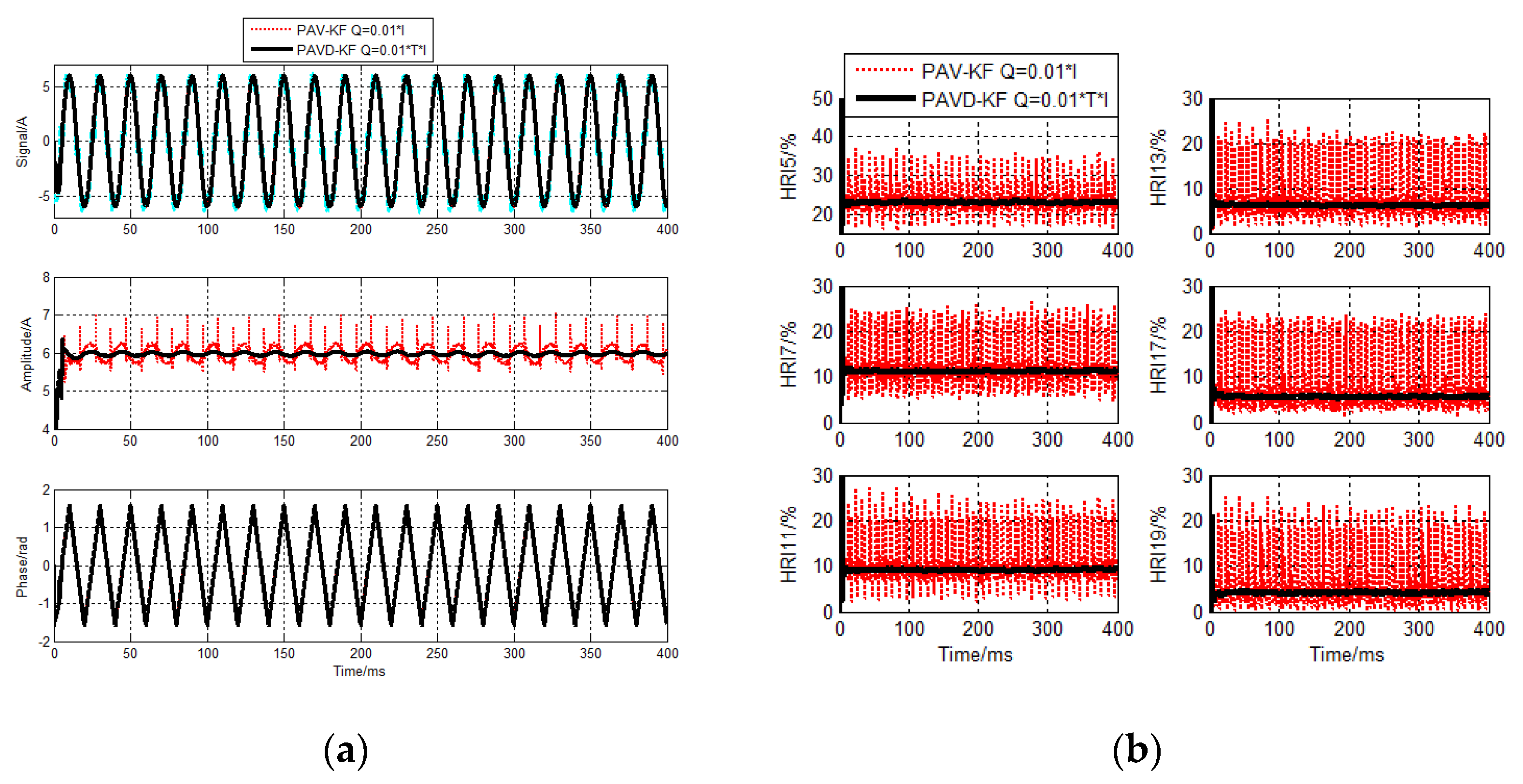
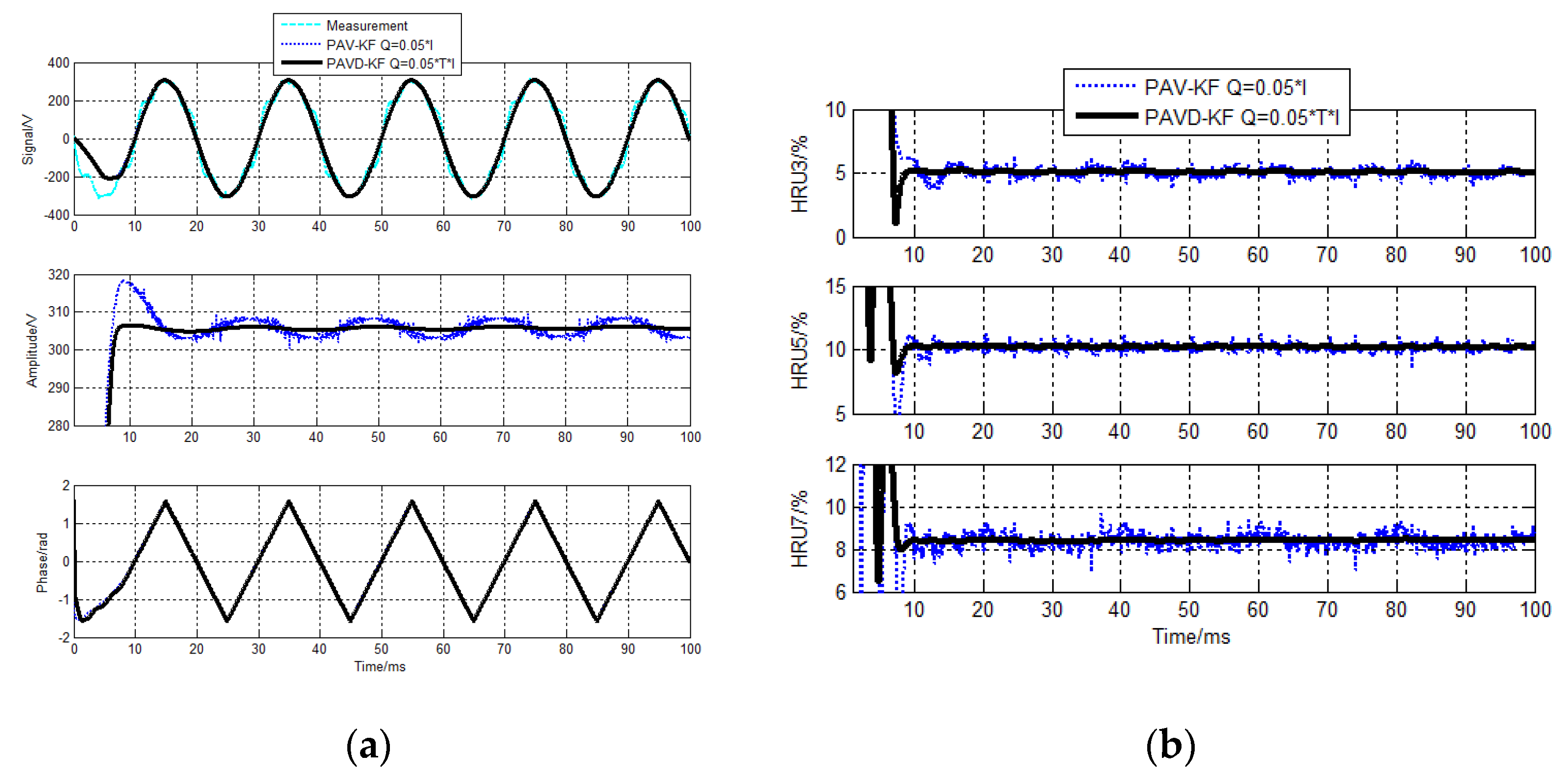
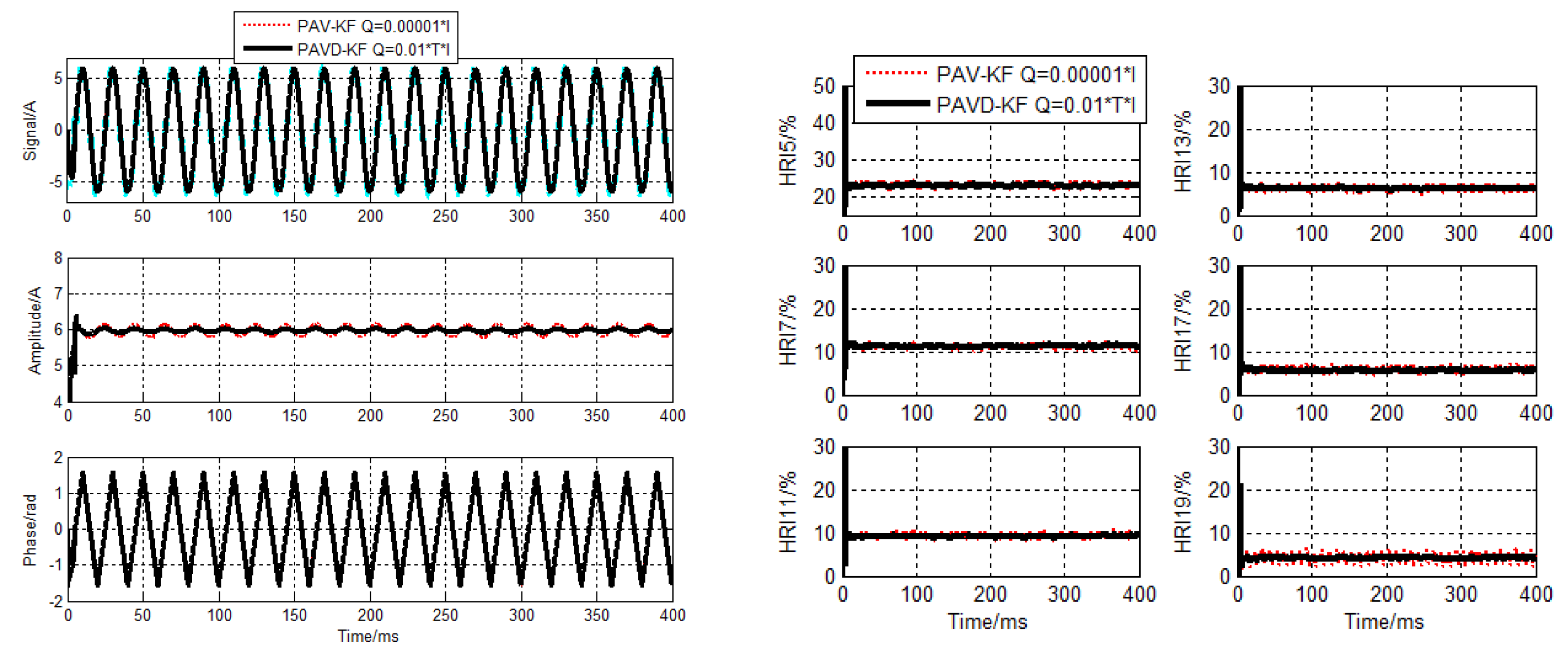
4.1.2. Detection Results for PAVD−KF Algorithm
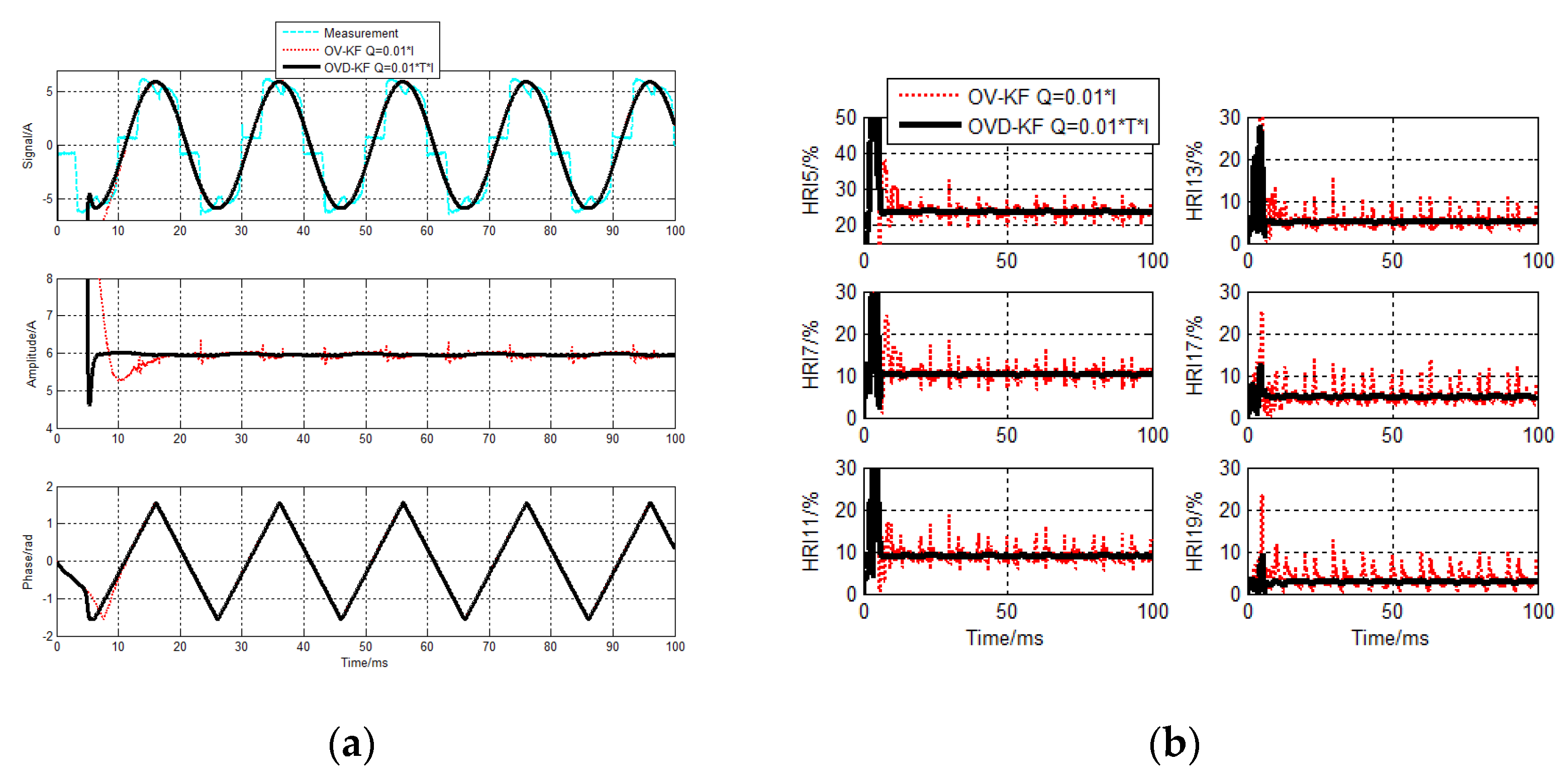
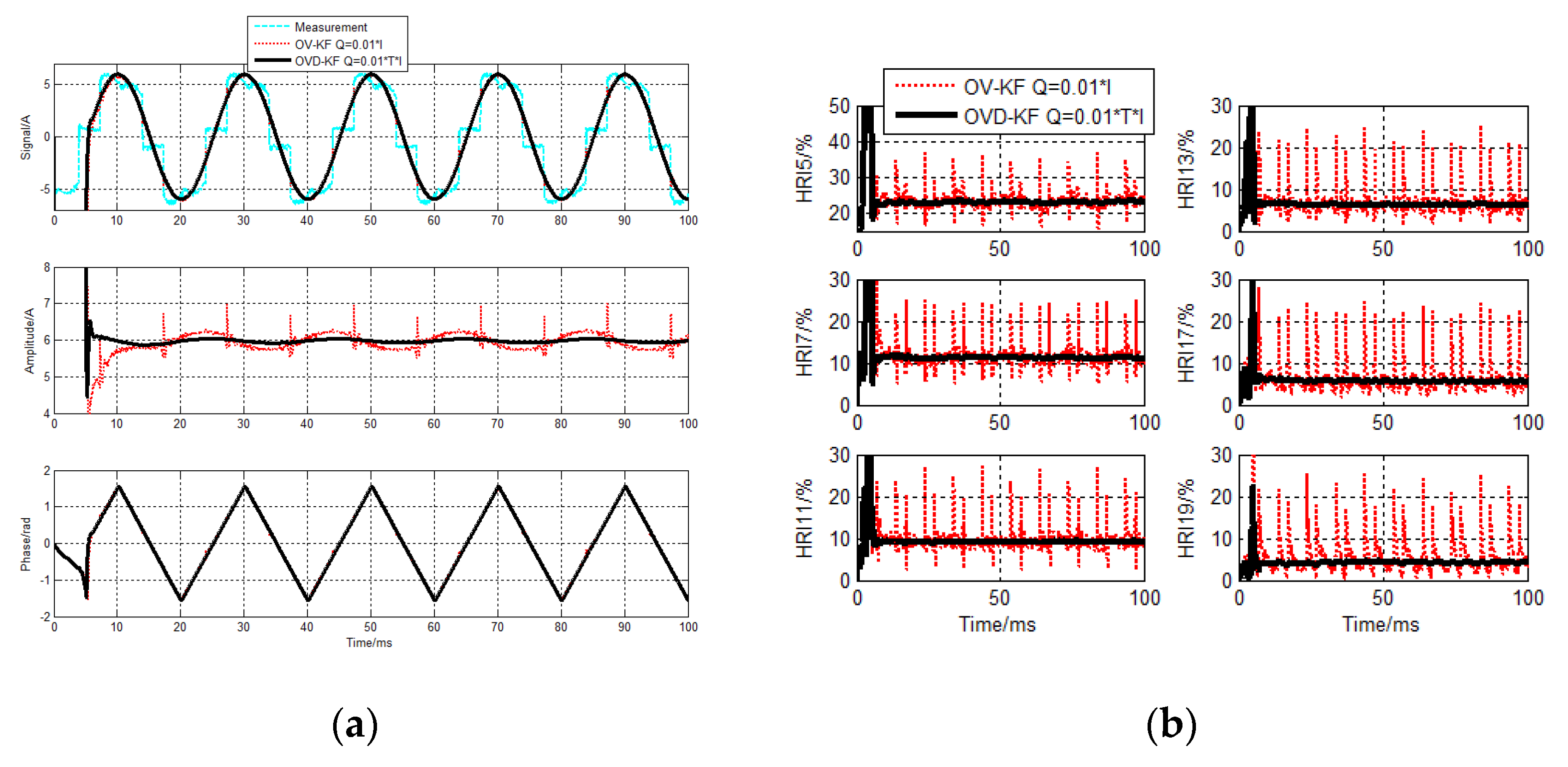
4.1.3. Detection Results for OVD−KF Algorithm
4.1.4. Summary for AC Current Detecting
4.2. Experiment and Evaluation for AC Voltage Detection
4.2.1. Experiment Settings
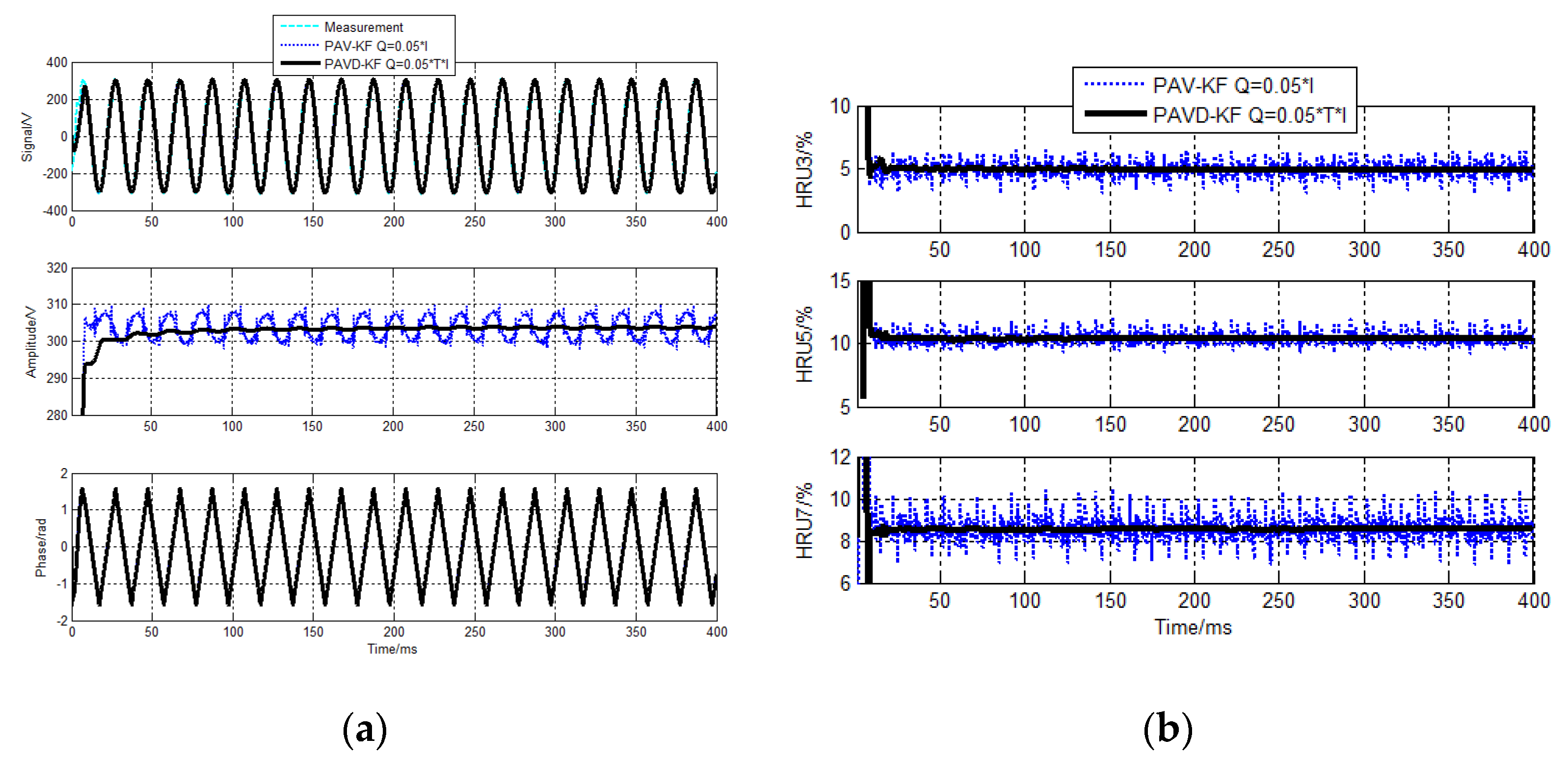
4.2.2. Detection Results for PAVD−KF Algorithm
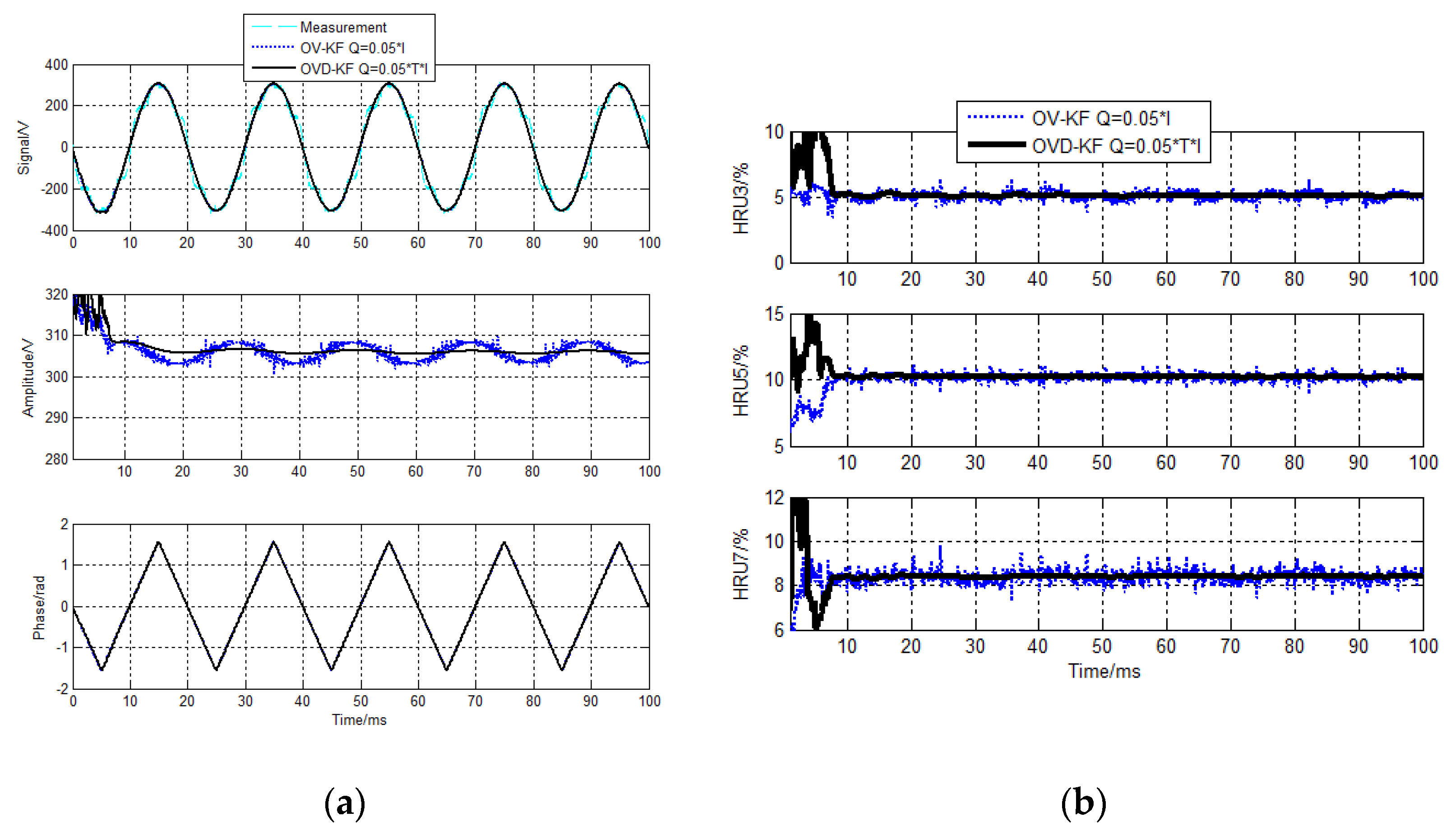
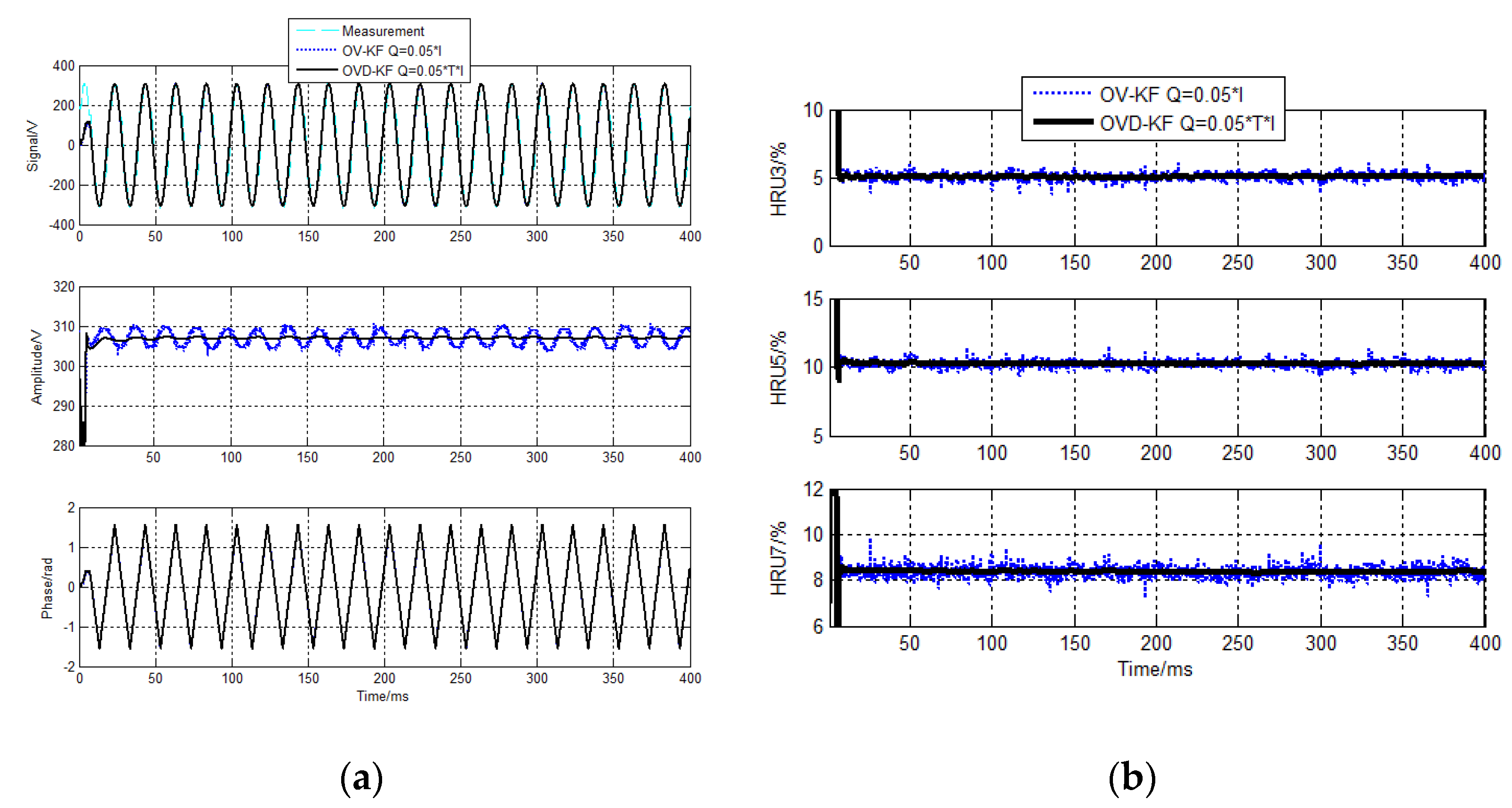
4.2.3. Detection Results for OVD−KF Algorithm
4.2.4. Summary for AC Voltage Detecting
4.3. Summary for Experiment and Evaluation
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Auger, F.; Hilairet, M.; Guerrero, J.M.; Monmasson, E.; Orlowska-Kowalska, T.; Katsura, S. Industrial Applications of the Kalman Filter: A Review. IEEE Trans. Ind. Electron. 2013, 60, 5458–5471. [Google Scholar] [CrossRef] [Green Version]
- Girgis, A.A.; Brown, R.G. Application of Kalman Filtering In Computer Relaying. IEEE Trans. Power Appar. Syst. 1981, 7, 3387–3397. [Google Scholar] [CrossRef]
- Girgis, A.A.; Hwang, T.L.D. Optimal Estimation of Voltage Phasors and Frequency Deviation. IEEE Trans. Power Appar. Syst. 1984, 10, 2943–2951. [Google Scholar] [CrossRef]
- Girgis, A.A.; Sallam, A.A.; El-Din, A.K. Identification and tracking of harmonic sources in a power system using a Kalman filte. IEEE Trans. Power Deliv. 1998, 13, 414–420. [Google Scholar] [CrossRef]
- Nie, X. Detection of Grid Voltage Fundamental and Harmonic Components Using Kalman Filter Based on Dynamic Tracking Model. IEEE Trans. Ind. Electron. 2020, 67, 1191–1200. [Google Scholar] [CrossRef]
- Naseri, F.; Kazemi, Z.; Farjah, E.; Ghanbari, T. Fast Detection and Compensation of Current Transformer Saturation Using Extended Kalman Filter. IEEE Trans. Power Deliv. 2020, 34, 1087–1097. [Google Scholar] [CrossRef]
- Swain, S.; Subudhi, B. Grid Synchronization of a PV System with Power Quality Disturbances Using Unscented Kalman Filtering. IEEE Trans. Sustain. Energy 2019, 10, 1240–1247. [Google Scholar] [CrossRef]
- Uz-Logoglu, E.; Salor, O.; Ermis, M. Real-Time Detection of Interharmonics and Harmonics of AC Electric Arc Furnaces on GPU Framework. IEEE Trans. Ind. Appl. 2019, 55, 1373–1378. [Google Scholar]
- Xi, Y.; Tang, X.; Li, Z.; Cui, Y.; Zhao, T.; Zeng, X.; Guo, J.; Duan, W. Harmonic estimation in power systems using an optimised adaptive Kalman filter based on PSO-GA. IET Gener. Transm. Distrib. 2019, 13, 3968–3979. [Google Scholar] [CrossRef]
- Bagheri, A.; Mardaneh, M.; Rajaei, A.; Rahideh, A. Detection of Grid Voltage Fundamental and Harmonic Components Using Kalman Filter and Generalized Averaging Method. IEEE Trans. Power Electron. 2016, 31, 1064–1073. [Google Scholar] [CrossRef]
- Cardoso, R.; Camargo, R.F.; Pinheiro, H.; Grundling, H.A. Kalman filter based synchronisation methods. IET Gener. Transm. Distrib. 2008, 2, 542–555. [Google Scholar] [CrossRef]
- Swain, S.; Subudhi, B. Iterated extended Kalman filter-based grid synchronisation control of a PV system. IET Energy Syst. Integr. 2019, 1, 219–228. [Google Scholar] [CrossRef]
- Ferrero, R.; Pegoraro, P.A.; Toscani, S. Synchrophasor Estimation for Three-Phase Systems Based on Taylor Extended Kalman Filtering. IEEE Trans. Instrum. Meas. 2020, 69, 6723–6730. [Google Scholar] [CrossRef]
- Golestan, S.; Guerrero, J.M.; Vasquez, J.C.; Abusorrah, A.M.; Al-Turki, Y. Single-Phase FLLs Based on Linear Kalman Filter, Limit-Cycle Oscillator, and Complex Bandpass Filter: Analysis and Comparison With a Standard FLL in Grid Applications. IEEE Trans. Power Electron. 2019, 34, 1064–1073. [Google Scholar] [CrossRef]
- Ahmed, H.; Biricik, S.; Benbouzid, M. Linear Kalman Filter-Based Grid Synchronization Technique: An Alternative Implementation. IEEE Trans. Ind. Inform. 2021, 17, 3847–3856. [Google Scholar] [CrossRef]
- Alam, S.J.; Arya, S.R. Control of UPQC based on steady state linear Kalman filter for compensation of power quality problems. Chin. J. Electr. Eng. 2020, 6, 52–65. [Google Scholar] [CrossRef]
- Xi, Y.; Li, Z.; Zeng, X.; Tang, X.; Liu, Q.; Xiao, H. Detection of power quality disturbance using an adaptive process noise covariance Kalman filte. Digit. Signal Process. 2018, 76, 34–49. [Google Scholar] [CrossRef]
- Wu, C.; Magana, M.E.; Cotilla-Sanchez, E. Dynamic Frequency and Amplitude Estimation for Three-Phase Unbalanced Power Systems Using the Unscented Kalman Filter. IEEE Trans. Instrum. Meas. 2019, 68, 3387–3395. [Google Scholar] [CrossRef]
- Panigrahi, R.; Subudhi, B.; Panda, P.C. A robust LQG servo control strategy of shunt-active power filter for power quality enhancement. IEEE Trans. Power Electron. 2016, 31, 2860–2869. [Google Scholar] [CrossRef]
- Panigrahi, R.; Subudhi, B. Performance enhancement of shunt active power filter using a Kalman filter-based H∞ control strategy. IEEE Trans. Power Electron. 2017, 32, 2622–2630. [Google Scholar] [CrossRef]
- Abdelsalam, A.A.; Abdelaziz, A.Y.; Kamh, M.Z. A Generalized Approach for Power Quality Disturbances Recognition Based on Kalman Filter. IEEE Access 2021, 9, 93614–93628. [Google Scholar] [CrossRef]
- Xi, Y.; Li, Z.; Tang, X.; Zeng, X. Classification of power quality disturbances based on KF-ML-Aided S-Transform and multilayers feedforward neural networks. IET Gener. Trans. Distrib. 2020, 14, 4010–4020. [Google Scholar] [CrossRef]
- Abdelsalam, A.A.; Eldesouky, A.A.; Sallam, A.A. Classification of Power System Disturbances using Linear Kalman Filter and Fuzzy-expert System. Electr. Power Energy Syst. 2012, 43, 688–695. [Google Scholar] [CrossRef]
- Abdelsalam, A.A.; Eldesouky, A.A.; Sallam, A.A. Characterization of power quality disturbances using hybrid technique of linear Kalman filter and fuzzy-expert system. Electr. Power Syst. Res. 2012, 83, 41–50. [Google Scholar] [CrossRef]
- Brown, R.G.; Hwang, P.Y.C. Introduction to Random Signals and Applied Kalman Filtering with MATLAB Exercises, 4th ed.; John Wiley& Sons, Inc.: Hoboken, NJ, USA, 2011. [Google Scholar]

















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nie, H.; Nie, X. Research on Dynamic Modeling of KF Algorithm for Detecting Distorted AC Signal. Energies 2021, 14, 8175. https://doi.org/10.3390/en14238175
Nie H, Nie X. Research on Dynamic Modeling of KF Algorithm for Detecting Distorted AC Signal. Energies. 2021; 14(23):8175. https://doi.org/10.3390/en14238175
Chicago/Turabian StyleNie, Haoyao, and Xiaohua Nie. 2021. "Research on Dynamic Modeling of KF Algorithm for Detecting Distorted AC Signal" Energies 14, no. 23: 8175. https://doi.org/10.3390/en14238175