
Design of a Pendulum Prototype for Dynamic Testing of Material Removal Using Picks

 ,
,
Abstract
:1. Introduction
2. Methodology
2.1. Cutting Process
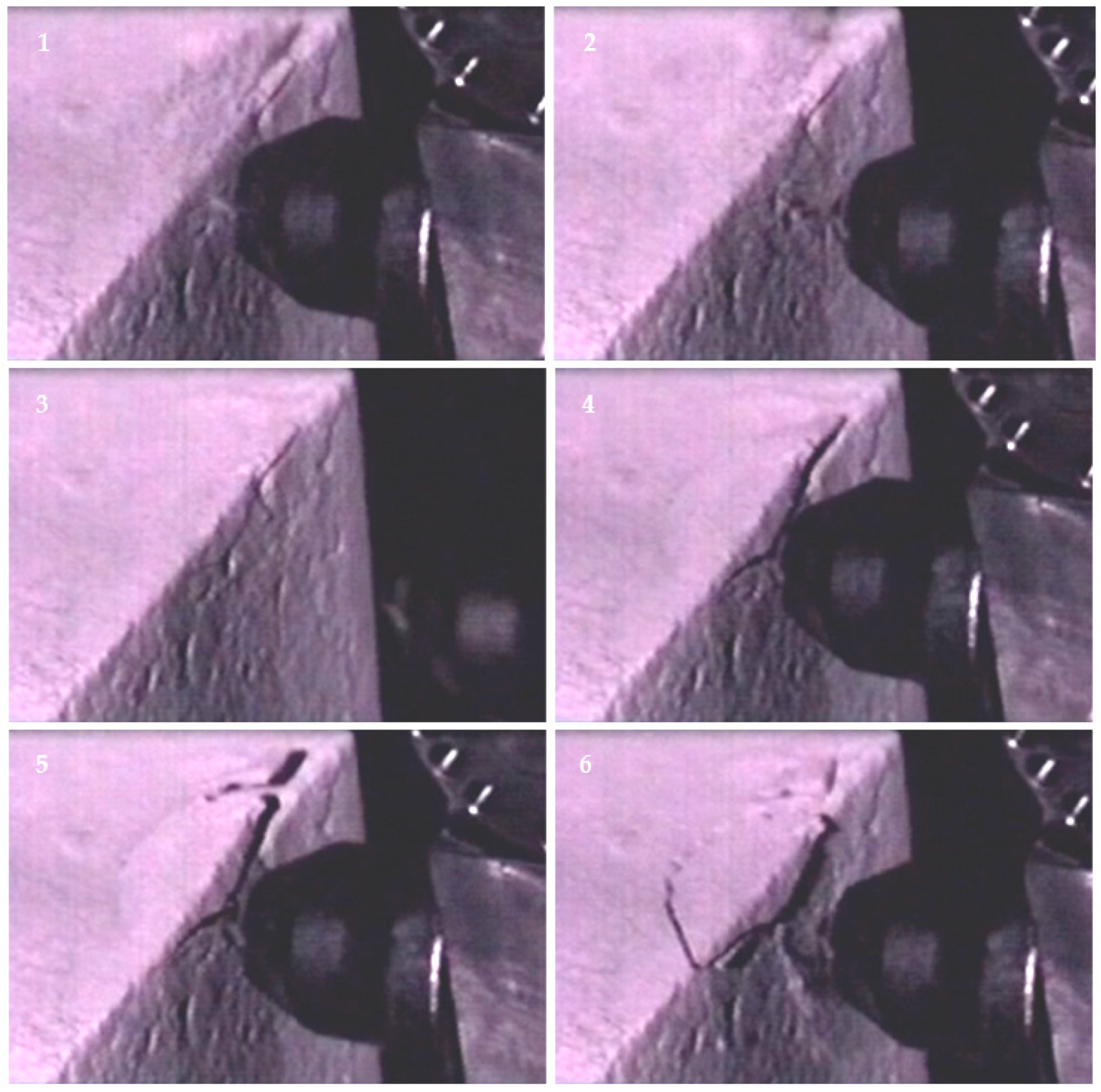
- Phase 3. Second chipping formation. Once the chipping has occurred and the load has been removed, the rock expands. An elastic reversion of the rock occurs, reaching a brittle fracture mechanism, with almost no plastic deformation, creating new micro-cracks that propagate rapidly causing breakage and detachment of new rock chips [34].
- A base zone of crushed material or crushed zone.
- A damaged or plastic zone where the micro-cracks generated in the crushed zone begin to propagate.
- An elastic zone of intact material.
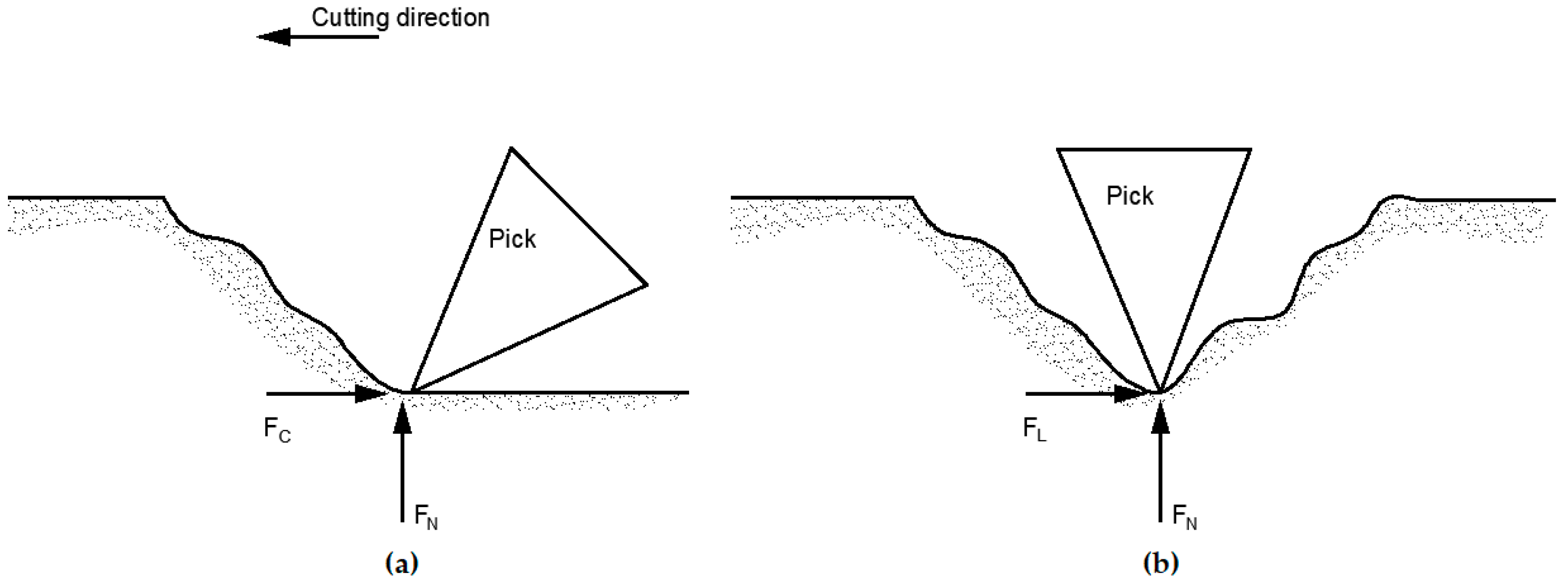
- A cutting force FC or main force, which generates the breakage and formation of the chips and acts in a parallel direction to the excavation face.
- A normal force FN or force that maintains the pick at the desired cutting depth and acts in a perpendicular direction to the excavation face.
- A lateral force FL or perpendicular force to the plane of the normal and cutting forces and which, due to its small magnitude compared to the rest of the forces, is considered to be depreciable.
2.2. Initital Prototype
- For each angle of fall, there is a limiting cutting depth above which no chips are obtained.
- At the same angle of fall, the surface of the chip or the surface that the removed chip leaves on the tested sample, increases with the cutting depth.
- In general, for the same cutting depth, the size of the surface of the removed chip increases with increasing energy. However, there is an optimum value above which energy is wasted, as an increase in energy does not imply an increase in chip size.
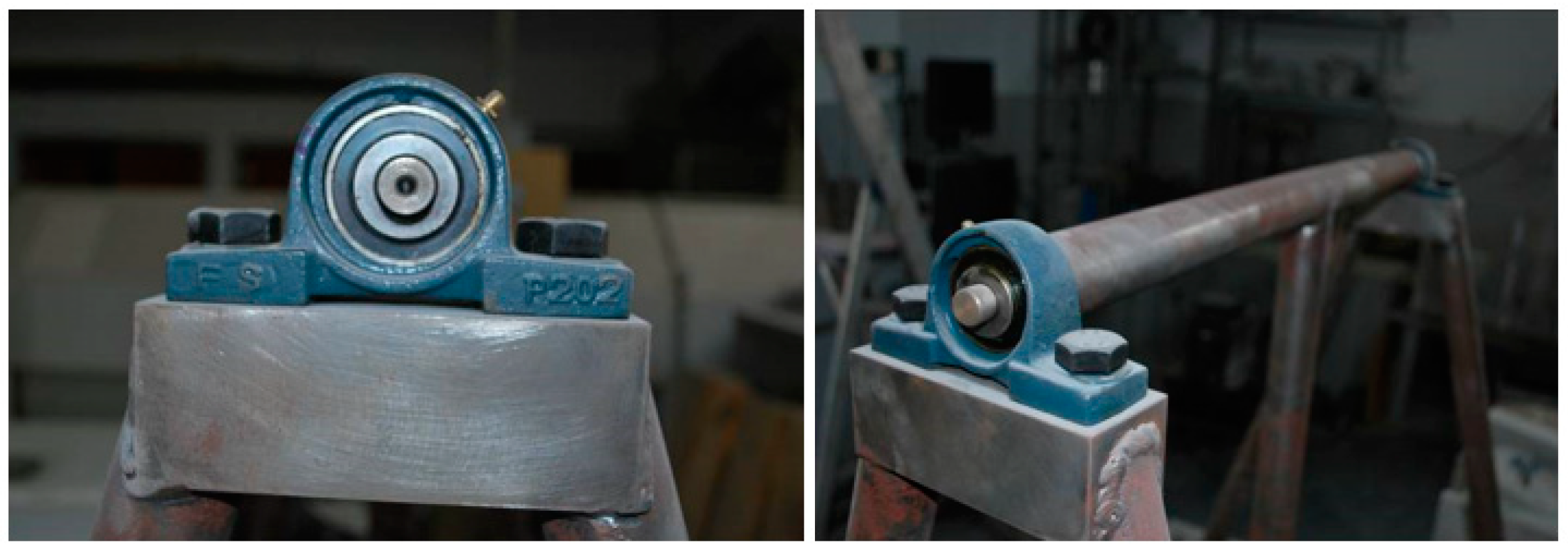
- Having a rigid structure to prevent oscillations of the arm during the pendulum movement.
- Minimising frictional energy losses in order to correctly calculate the energy required to remove a chip.
- Provide a sample holder to prevent movement and tipping of the sample on impact.
- Measure the possible rebound of the pick to estimate the excess energy and thus accurately obtain the energy required to remove a chip.
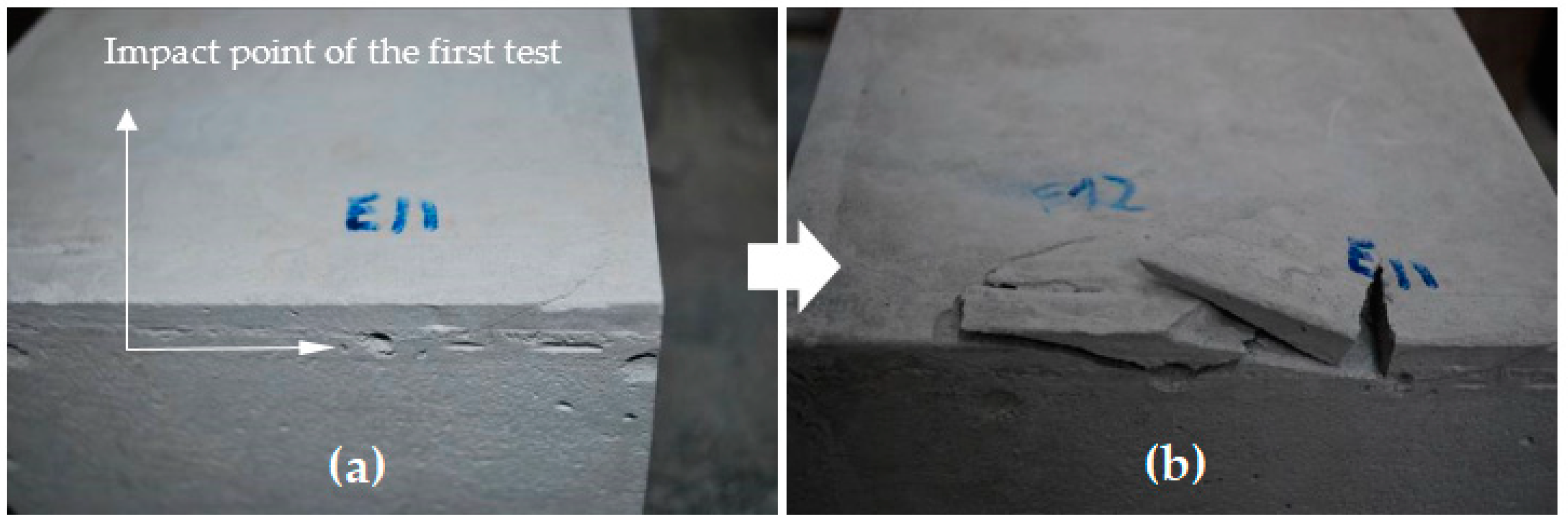
- Work with samples of decimetric size for the correct development of the chips and thus guarantee that the tests carried out on the same block are not affected by the adjacent tests (radius of affection of the damaged area).
- Include a system of weights to increase the energy in those tests where the energy produced for the equipment is not enough to generate chips.
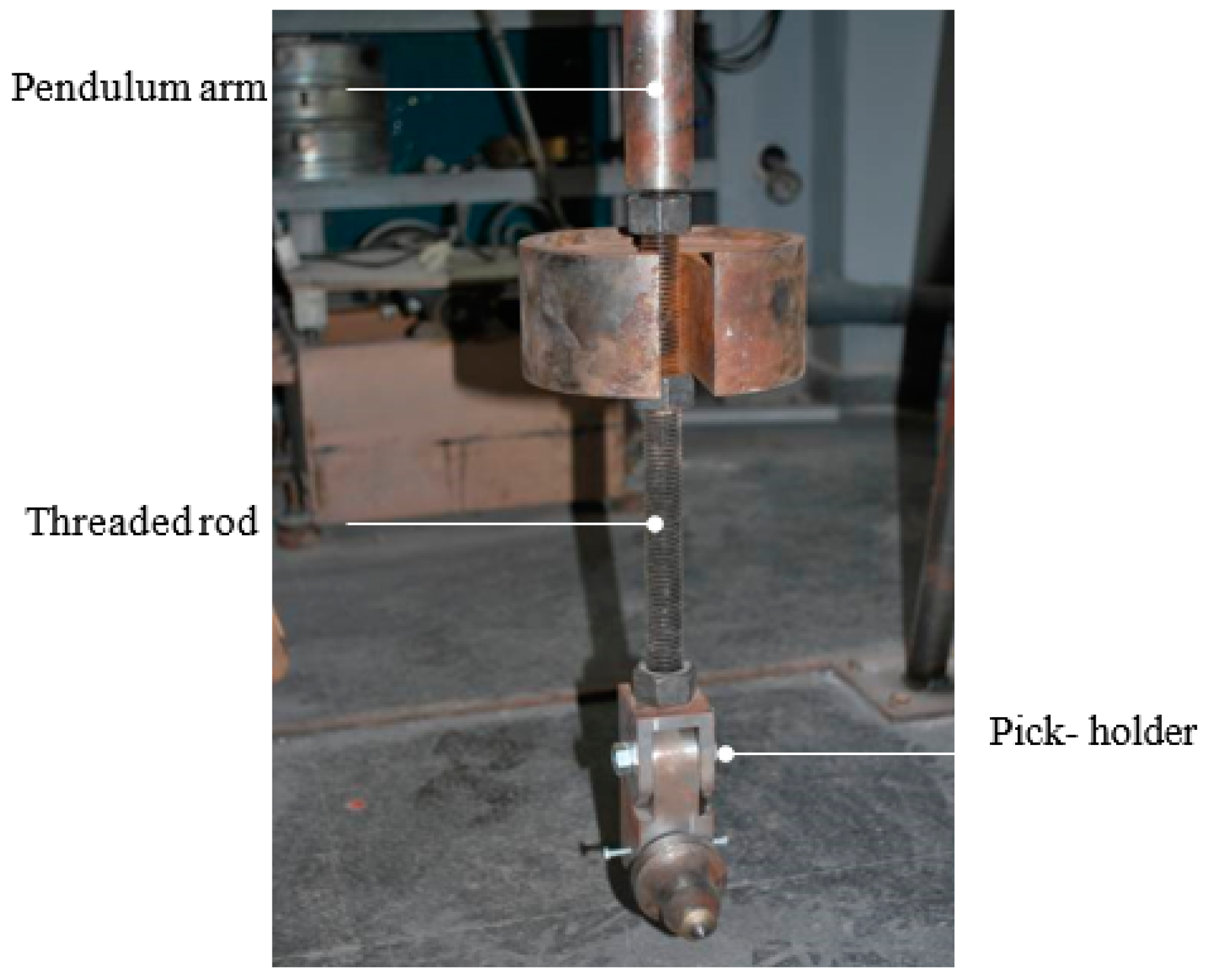
2.3. Final Prototype
- Test samples of appropriate size, with dimensions that approximate the real working scale.
- Modify the impact energy by varying the amplitude of the pendulum movement and the impacting mass.
- Modify, in a simple way, the type of cutting tool to be used and its angle of attack, allowing the most appropriate ones to be defined for each type of rock.
- Modify parameters such as impact speed and cutting depth in order to optimise the removal.
3. Discussion
4. Conclusions
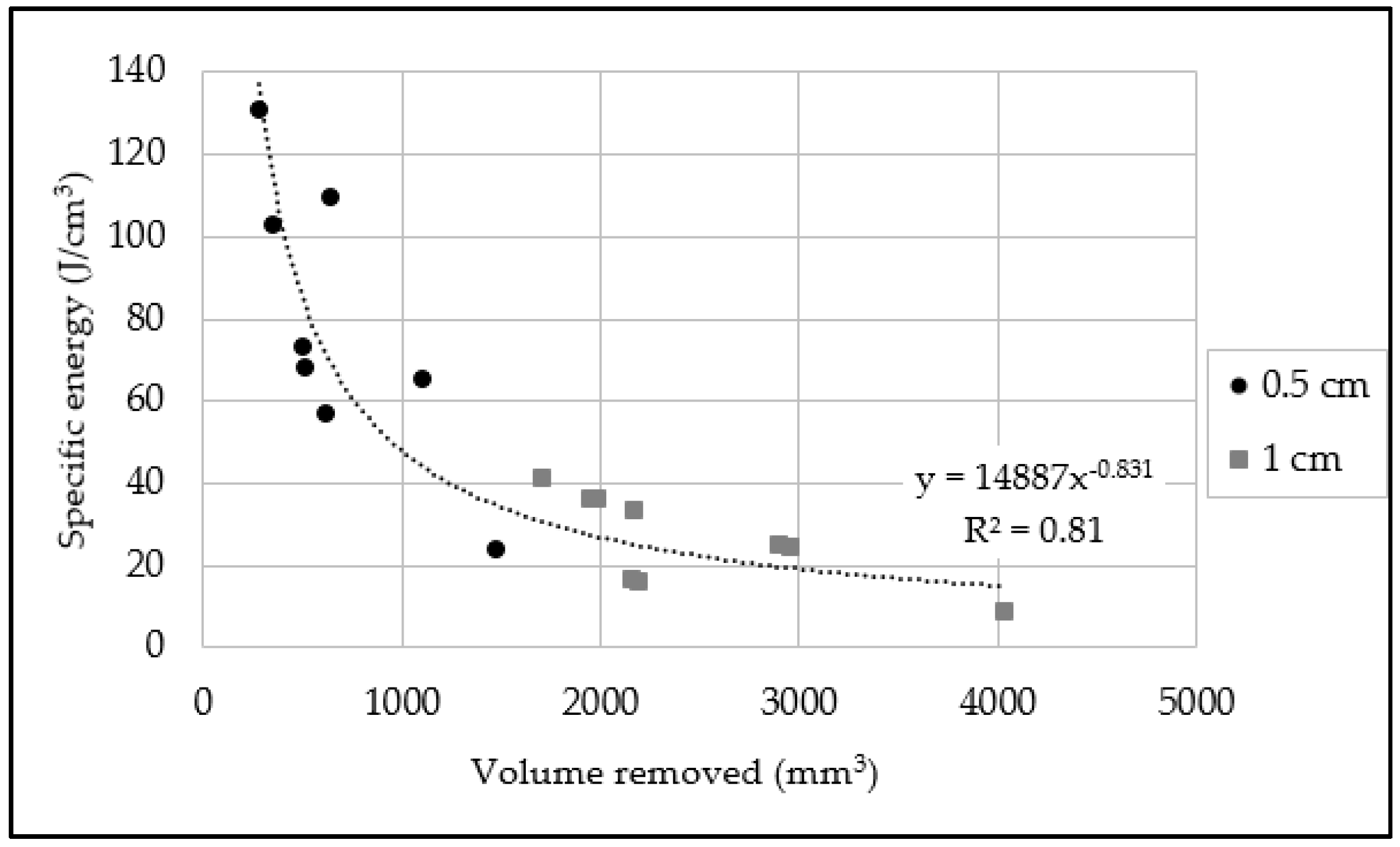
- For each cutting depth there is an impact energy, above which energy is wasted.
- For each material tested, there is an optimum energy that defines the cutting depth and the impact energy for maximum cutting performance.
- The presence of discontinuities in the material to be removed influences the cutting process depending on their orientation with respect to the direction of impact.
- It is necessary analyse other parameters as the angle of impact of the pick or the influence of the properties of the material to be removed, but also the influence of the speed of the pick in the size of the chip removed.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Vogt, D. A review of rock cutting for underground mining: Past, present, and future. J. S. Afr. Inst. Min. Metall. 2016, 116, 1011–1026. [Google Scholar] [CrossRef] [Green Version]
- Bilgin, N.; Copur, H.; Balci, C. Mechanical Excavation in Mining and Civil Industries; CRC Press, Taylor & Francis Group: Boca Ratón, FL, USA, 2013; 388p. [Google Scholar] [CrossRef]
- Evans, I. A theory of the cutting force for point attack picks. Int. J. Min. Eng. 1984, 2, 63–71. [Google Scholar] [CrossRef]
- Evans, I. Basic Mechanics of the point attack pick. Colliery Guard. 1984, 232, 189–193. [Google Scholar]
- Goktan, R.M. A suggested improvement on Evans cutting theory for conical bits. In Proceedings of the Fourth International Symposium on Mine Mechanization and Automation, Brisbane, QLD, Australia, 6–9 July 1997. [Google Scholar]
- Nishimatsu, Y. The mechanics of the rock cutting. Int. J. Rock Mech. Min. Sci. 1972, 9, 261–271. [Google Scholar] [CrossRef]
- Roxborough, F.F.; Pedroncelli, E.J. A practical evaluation of some coal cutting theories using a continuous miner. Min. Eng. 1982, 142, 145–156. [Google Scholar]
- Fowell, R.J. The mechanics of rock cutting. Compr. Rock Eng. 1993, 4, 155–175. [Google Scholar]
- Mishnaevsky, L. Rock fragmentation and optimization of drilling tools. In Fracture of Rock; WIT Press: Southampton, UK, 1998; pp. 167–203. [Google Scholar]
- Hughes, H. Some aspects of rock machining. Int. J. Rock Mech. Min. Sci. 1972, 9, 205–211. [Google Scholar] [CrossRef]
- Roxborough, F.F.; Rispin, A. The mechanical cutting characteristics of the lower chalk. Tunn. Tunn. 1973, 5, 45–67. [Google Scholar]
- Roxborough, F.F.; Phillips, H.R. Rock excavation by disc cutter. Int. J. Rock Mech. Min. Sci. 1975, 12, 361–366. [Google Scholar] [CrossRef]
- Roxborough, F.F. Cutting rocks with picks. Min. Eng. 1973, 132, 445–452. [Google Scholar]
- Barker, J.S. A laboratory investigation of rock cutting using large picks. Int. Rock Mech. Min. Sci. 1964, 1, 519–534. [Google Scholar] [CrossRef]
- Evans, I. Optimum line spacing for cutting picks. Min. Eng. 1982, 1, 433–434. [Google Scholar]
- He, B.; Shao, W.; Tang, J.Y.; Zong, X.M.; Kang, K.X. The Effect of Pick Profile on the Cutting Performance of Point Attack Picks. Key Eng. Mater. 2018, 789, 31–36. [Google Scholar] [CrossRef]
- Yasar, A.; Yilmaz, A.O. Drag pick cutting tests: A comparison between experimental and theoretical results. J. Rock Mech. Geotech. Eng. 2018, 10, 893–906. [Google Scholar] [CrossRef]
- Tiryaki, B.; Boland, J.N.; Li, X.S. Empirical models to predict mean cutting forces on point-attack pick cutters. Int. J. Rock Mech. Min. Sci. 2010, 47, 858–864. [Google Scholar] [CrossRef]
- Mohammadnejad, M.; Dehkhoda, S.; Fukuda, D.; Liu, H.; Chan, A. Numerical simulation of the rock cutting. In Proceedings of the A Specialized Conference of ISRM 2019 Rock Dynamics Summit, Okinawa, Japan, 7–11 May 2019. [Google Scholar]
- Mohammadnejad, M.; Dehkhoda, S.; Fukuda, D.; Liu, H.; Chan, A. GPGPU-parallelised hybrid finite-discrete element modelling of rock chipping and fragmentation process in mechanical cutting. J. Rock Mech. Geotech. Eng. 2020, 12, 310–325. [Google Scholar] [CrossRef]
- Kalogeropoulos, A.; Michalakopoulos, T. Numerical simulation of rock cutting using Yade. In MATEC Web of Conferences; EDP Sciences: Les Ulis, France, 2021; Volume 342, p. 02011. [Google Scholar] [CrossRef]
- Copur, H.; Bilgin, N.; Tuncdemir, H.; Balci, C. A set of indices based on indentation tests for assessment of rock cutting performance and rock properties. J. S. Afr. Inst. Min. Metall. 2003, 103, 589–600. [Google Scholar]
- Liu, K.; Liu, S.; Li, L.; Cui, X. Experiment on Conical Pick Cutting Rock Material Assisted with Front and Rear Water Jet. Adv. Mater. Sci. Eng. 2015, 2015, 506579. [Google Scholar] [CrossRef] [Green Version]
- Ciccu, R.; Grosso, B. Improvement of disc cutter performance by water jet assistance. Rock Mech. Rock Eng. 2014, 47, 733–744. [Google Scholar] [CrossRef]
- Liu, S.Y.; Liu, X.H.; Chen, J.F.; Lin, M.X. Rock breaking performance of a pick assisted by high-pressure water jet under different configuration modes. Chin. J. Mech. Eng. 2015, 28, 607–617. [Google Scholar] [CrossRef]
- Appl, F.C.; Rao, B.N.; Walker, B.H. Effects of AlCl3 additive while cutting granite with a single diamond. Ind. Diam. Rev. 1981, 41, 318–321. [Google Scholar] [CrossRef]
- Engelmann, W.H.; Watson, P.J.; Tuzinski, P.A.; Pahlman, J.E. Zeta Potential Control for Simultaneous Enhancement of Penetration Rates and Bit Life in Rock Drilling; U.S. Bureau of Mines Report of Investigations: Pittsburgh, PA, USA, 1987. [Google Scholar]
- Westwood, A.R.C. Environmental enhanced disintegration of hard rocks. In Proceedings of the Conference on Research in Excavation Technology, Vail, CO, USA, 21–24 October 1975. [Google Scholar]
- Brunsing, T.; Goodman, R.E. Hard rock excavating by prestressed rock cutting. In Proceedings of the 20th Symposium on Rock Mechanics, Austin, TX, USA, 4–6 June 1979. [Google Scholar]
- Liu, H.Y.; Kou, S.Q.; Lindquist, P.A.; Tang, C.A. Numerical simulation of the rock fragmentation process induced by indenters. Int. J. Rock Mech. Min. Sci. 2002, 39, 491–505. [Google Scholar] [CrossRef]
- Mishnaevsky, L.L. Physical mechanisms of hard rock fragmentation under mechanical loading: A review. Int. J. Rock Mech. Min. Sci. 1995, 6, 763–766. [Google Scholar] [CrossRef]
- Fang, Z.; Harrison, J.P. Development of a local degradation approach to the modeling of brittle fracture in heterogeneous rocks. Int. J. Rock Mech. Min. Sci. 2002, 39, 443–457. [Google Scholar] [CrossRef]
- Chen, L.H.; Labuz, J.F. Indentation of rock by wedge-shaped tools. Int. J. Rock Mech. Min. Sci. 2006, 43, 1023–1033. [Google Scholar] [CrossRef]
- Ersoy, A.; Atici, U. Performance Characteristics of circular diamond saws in cutting different types of rock. Diam. Relat. Mater. 2004, 13, 22–37. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test | Cutting Depth (cm) | Angle (°) | Chip | Chip Surface (mm2) |
|---|---|---|---|---|
| 1 | 0.5 | 45 | Yes | 252.8 |
| 2 | 0.5 | 45 | Yes | 560.7 |
| 3 | 0.5 | 45 | Yes | 384.7 |
| 4 | 0.5 | 90 | Yes | 835.1 |
| 5 | 0.5 | 90 | Yes | 913.3 |
| 6 | 0.5 | 90 | Yes | 615.4 |
| 7 | 1 | 45 | No | |
| 8 | 1 | 45 | No | |
| 9 | 1 | 45 | No | |
| 10 | 1 | 90 | Yes | 1449.6 |
| 11 | 1 | 90 | Yes | 1166.9 |
| 12 | 1 | 90 | Yes | 1069.9 |
| 13 | 1.5 | 45 | No | |
| 14 | 1.5 | 45 | No | |
| 15 | 1.5 | 45 | No | |
| 16 | 1.5 | 90 | Yes | 2307.9 |
| 17 | 1.5 | 90 | Yes | 2330.5 |
| 18 | 1.5 | 90 | Yes | 2419.1 |
| 19 | 2 | 45 | No | |
| 20 | 2 | 45 | No | |
| 21 | 2 | 45 | No | |
| 22 | 2 | 90 | No | |
| 23 | 2 | 90 | No | |
| 24 | 2 | 90 | No |
| Test | θ (°) | Hc (cm) | E (J) | Chip | A (mm2) | EA (J/cm2) | V (mm3) | ES (J/cm3) |
|---|---|---|---|---|---|---|---|---|
| 1 | 20 | 0.5 | 35.5 | Yes | 383.3 | 9.3 | 423.6 | 83.8 |
| 2 | 20 | 0.5 | 35.5 | Yes | 319.1 | 11.1 | 440.8 | 80.7 |
| 3 | 20 | 0.5 | 35.5 | Yes | 349.1 | 10.2 | 457.9 | 77.5 |
| 4 | 40 | 0.5 | 71 | Yes | 729.4 | 9.7 | 1437.3 | 49.4 |
| 5 | 40 | 0.5 | 71 | Yes | 724.8 | 9.8 | 1434.2 | 49.5 |
| 6 | 40 | 0.5 | 71 | Yes | 753.1 | 9.4 | 1448.8 | 49 |
| 7 | 20 | 1 | 35.5 | Yes | 741.6 | 4.8 | 1407.8 | 25.2 |
| 8 | 20 | 1 | 35.5 | Yes | 730.3 | 4.9 | 1450 | 24.5 |
| 9 | 20 | 1 | 35.5 | Yes | 705.6 | 5.0 | 1536.4 | 23.1 |
| 10 | 40 | 1 | 71 | Yes | 992 | 7.2 | 1119.9 | 63.4 |
| 11 | 40 | 1 | 71 | Yes | 964.4 | 7.4 | 1162.8 | 61.1 |
| 12 | 40 | 1 | 71 | Yes | 952.4 | 7.5 | 1143.9 | 62.1 |
| 13 | 20 | 1.5 | 35.5 | No | ||||
| 14 | 20 | 1.5 | 35.5 | No | ||||
| 15 | 20 | 1.5 | 35.5 | No | ||||
| 16 | 35 | 1.5 | 64.2 | Yes | 1789.5 | 3.6 | 5446.3 | 11.8 |
| 17 | 35 | 1.5 | 64.2 | Yes | 1899.4 | 3.4 | 5765.9 | 11.1 |
| 18 | 35 | 1.5 | 64.2 | Yes | 2104.8 | 3 | 4906.7 | 13.1 |
| 19 | 40 | 1.5 | 71 | No | ||||
| 20 | 40 | 1.5 | 71 | Yes | 3199.6 | 2.2 | 12,610.7 | 5.6 |
| 21 | 40 | 1.5 | 71 | No | ||||
| 22 | 20 | 2 | 35.5 | No | ||||
| 23 | 20 | 2 | 35.5 | No | ||||
| 24 | 20 | 2 | 35.5 | No | ||||
| 25 | 35 | 2 | 64.2 | Yes | 3600.5 | 1.8 | 16,750 | 3.8 |
| 26 | 35 | 2 | 64.2 | Yes | 3500 | 1.8 | 16,550.3 | 3.9 |
| 27 | 35 | 2 | 64.2 | Yes | 3550 | 1.8 | 16,650.7 | 3.9 |
| 28 | 40 | 2 | 71 | No | ||||
| 29 | 40 | 2 | 71 | No | ||||
| 30 | 40 | 2 | 71 | No |
| Test | θ (°) | Hc (cm) | E (J) | Chip | A (mm2) | EA (J/cm2) | V (mm3) | ES (J/cm3) |
|---|---|---|---|---|---|---|---|---|
| 1 | 20 | 0.5 | 35.5 | Yes | 464.9 | 7.6 | 623.1 | 57.0 |
| 2 | 20 | 0.5 | 35.5 | Yes | 397.2 | 8.9 | 519.3 | 68.3 |
| 3 | 20 | 0.5 | 35.5 | No | ||||
| 4 | 20 | 0.5 | 35.5 | Yes | 1051.8 | 3.4 | 1479.5 | 24.0 |
| 5 | 20 | 0.5 | 35.5 | No | ||||
| 6 | 25 | 0.5 | 36.9 | Yes | 275.4 | 13.4 | 282.1 | 130.7 |
| 7 | 25 | 0.5 | 36.9 | Yes | 298.4 | 12.4 | 358.5 | 102.8 |
| 8 | 25 | 0.5 | 36.9 | Yes | 441.0 | 8.4 | 502.8 | 73.3 |
| 9 | 40 | 0.5 | 71.0 | Yes | 559.0 | 12.7 | 649.0 | 109.4 |
| 10 | 45 | 0.5 | 72.4 | Yes | 702.9 | 10.3 | 1104.4 | 65.5 |
| 11 | 20 | 1 | 35.5 | Yes | 1276.4 | 2.8 | 2161.0 | 16.4 |
| 12 | 20 | 1 | 35.5 | Yes | 1027.0 | 3.5 | 2202.1 | 16.1 |
| 13 | 20 | 1 | 35.5 | Yes | 1700.5 | 2.1 | 4035.7 | 8.8 |
| 14 | 40 | 1 | 71.0 | Yes | 1172.3 | 6.1 | 1960.2 | 36.2 |
| 15 | 40 | 1 | 71.0 | Yes | 1184.5 | 6.0 | 1715.3 | 41.4 |
| 16 | 45 | 1 | 72.4 | Yes | 1546.9 | 4.6 | 2901.5 | 24.7 |
| 17 | 45 | 1 | 72.4 | Yes | 1372.0 | 5.2 | 2967.7 | 24.2 |
| 18 | 45 | 1 | 72.4 | Yes | 1189.7 | 6.1 | 2176.3 | 33.2 |
| 19 | 45 | 1 | 72.4 | Yes | 1183.4 | 6.1 | 1994.0 | 36.3 |
| Test | θ (°) | Hc (cm) | E (J) | Chip | A (mm2) | EA (J/cm2) |
|---|---|---|---|---|---|---|
| 1 | 40 | 1 | 71 | No | ||
| 2 | 40 | 1 | 71 | Yes | 4674.3 | 1.5 |
| Test | θ (°) | E (J) | Chip | A (mm2) | EA (J/cm2) | V (mm3) | ES (J/cm3) | Observations |
|---|---|---|---|---|---|---|---|---|
| 1 | 10 | 30 | Yes | 1098.1 | 2.9 | 2606.5 | 12.0 | Nearly formed- Hand raised |
| 2 | 15 | 34.1 | Yes | 1108.0 | 3.0 | 2223.7 | 14.7 | Remained in place |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Prendes-Gero, M.-B.; González-Nicieza, C.; Betegón-Biempica, C.; Álvarez-Fernández, M.-I. Design of a Pendulum Prototype for Dynamic Testing of Material Removal Using Picks. Energies 2021, 14, 6831. https://doi.org/10.3390/en14206831
Prendes-Gero M-B, González-Nicieza C, Betegón-Biempica C, Álvarez-Fernández M-I. Design of a Pendulum Prototype for Dynamic Testing of Material Removal Using Picks. Energies. 2021; 14(20):6831. https://doi.org/10.3390/en14206831
Chicago/Turabian StylePrendes-Gero, María-Belén, Celestino González-Nicieza, Covadonga Betegón-Biempica, and Martina-Inmaculada Álvarez-Fernández. 2021. "Design of a Pendulum Prototype for Dynamic Testing of Material Removal Using Picks" Energies 14, no. 20: 6831. https://doi.org/10.3390/en14206831