
Fractional Order Model of the Two Dimensional Heat Transfer Process


Abstract
:1. Introduction
2. Preliminaries
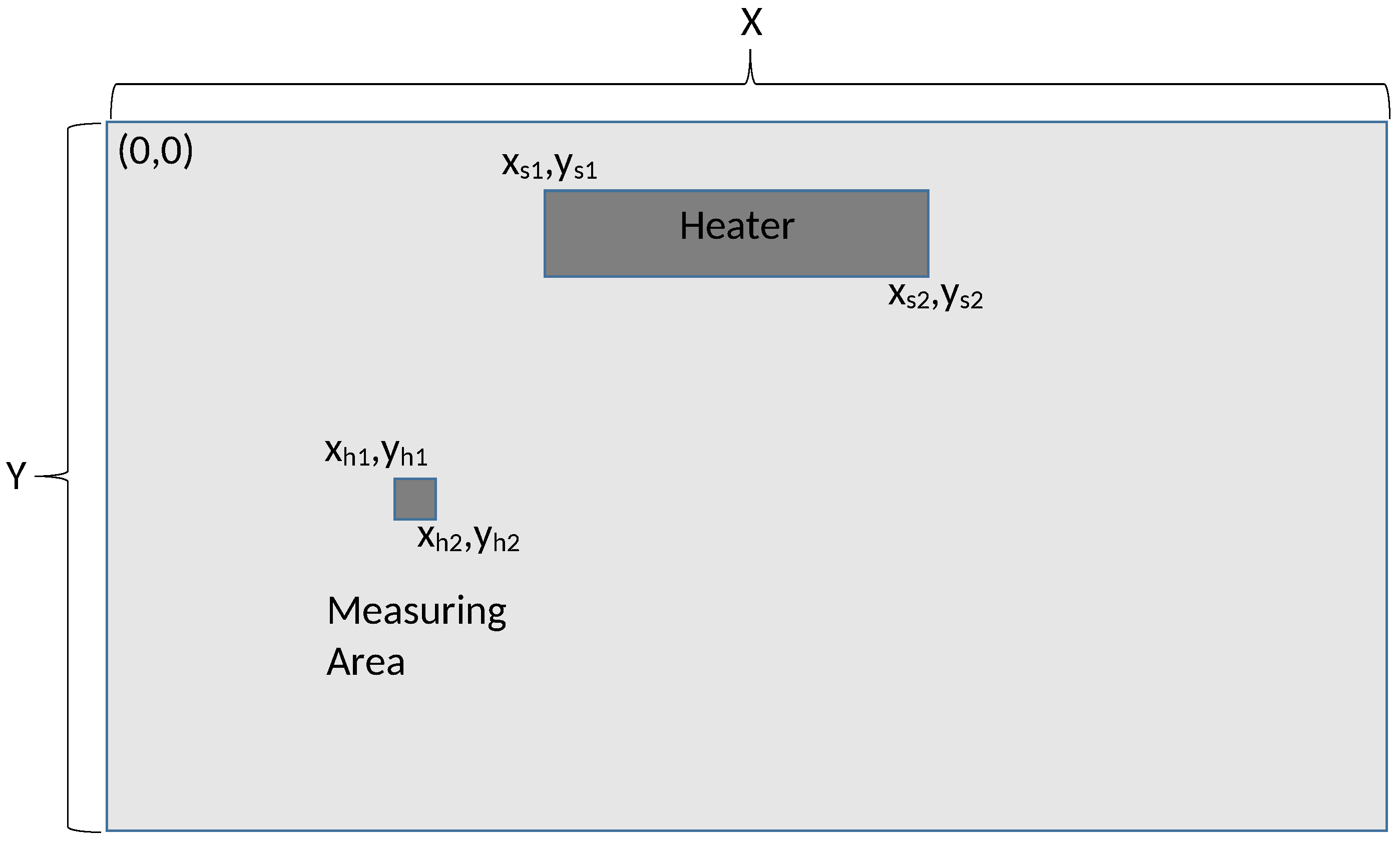
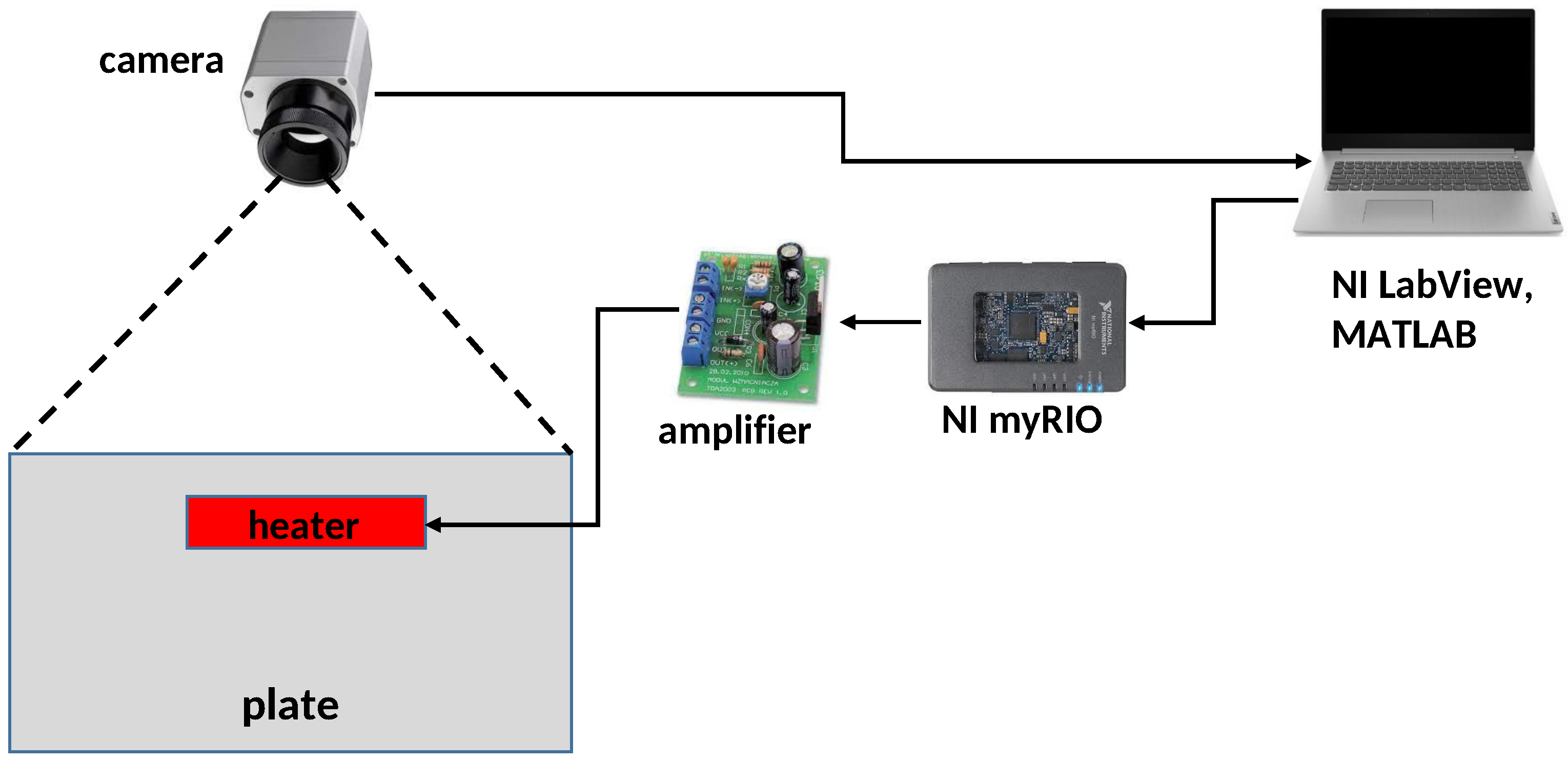
3. The Experimental System and Its FO Model
3.1. The Decomposition of the Model
3.2. The Stability
3.3. The Convergence
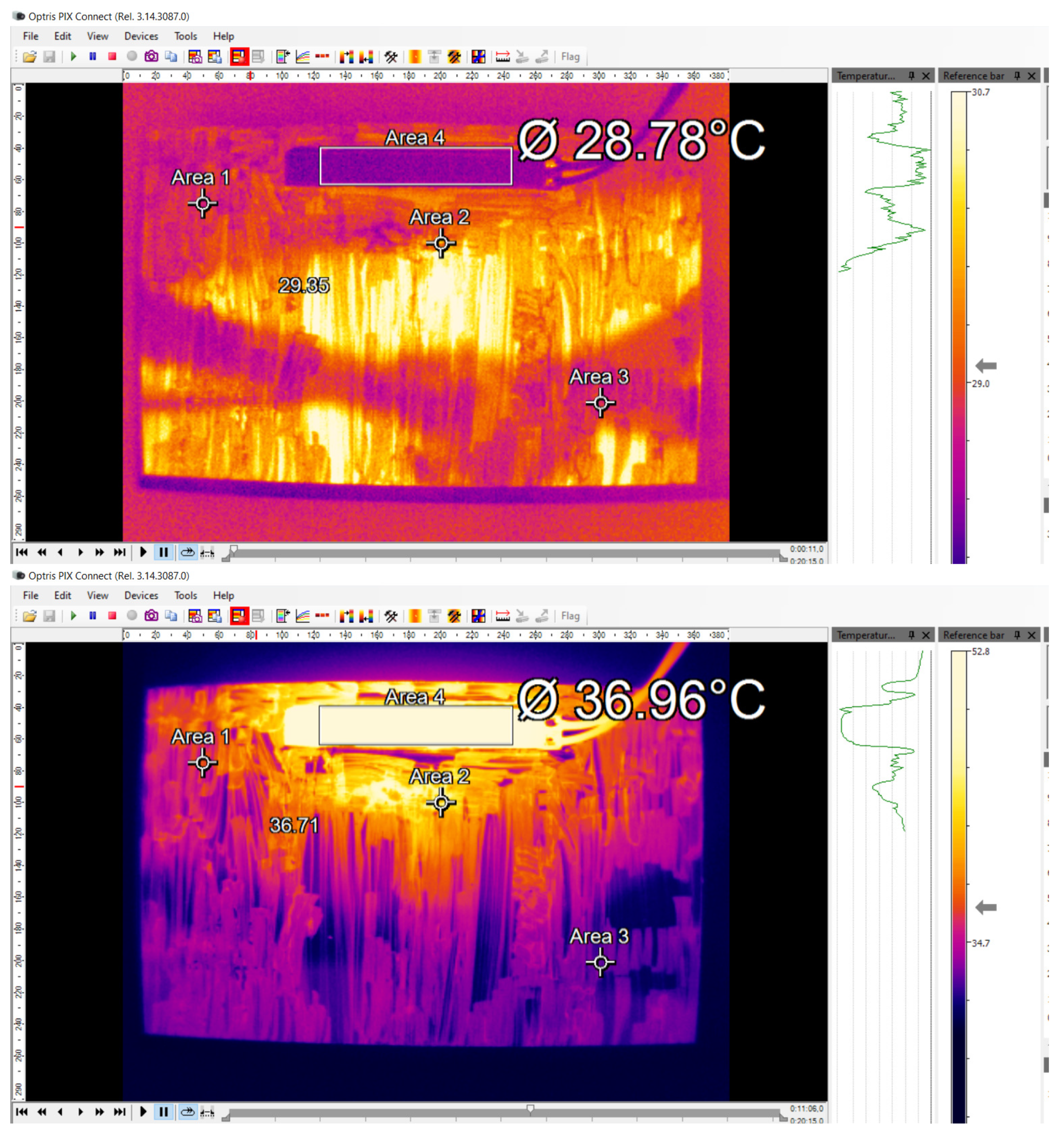
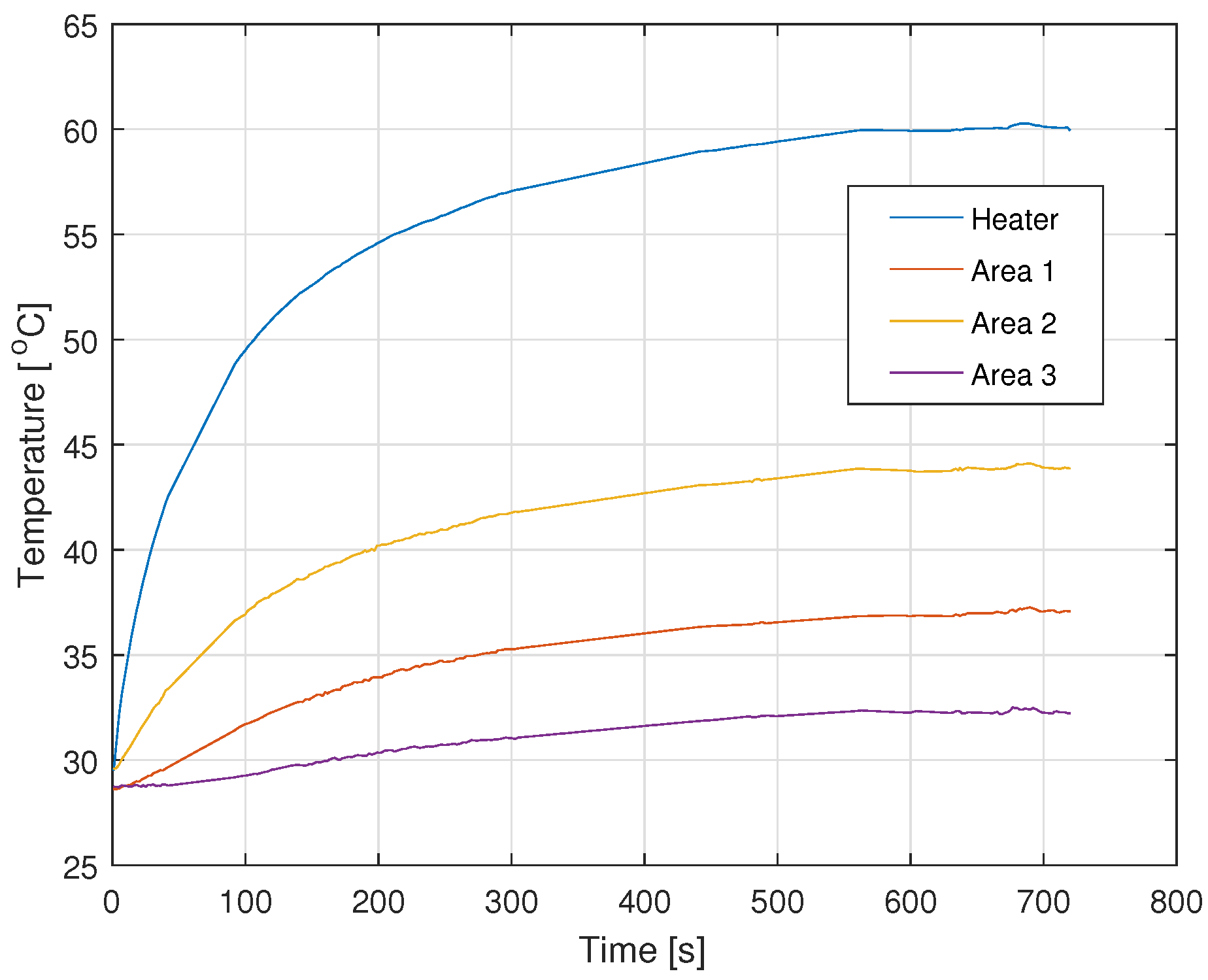
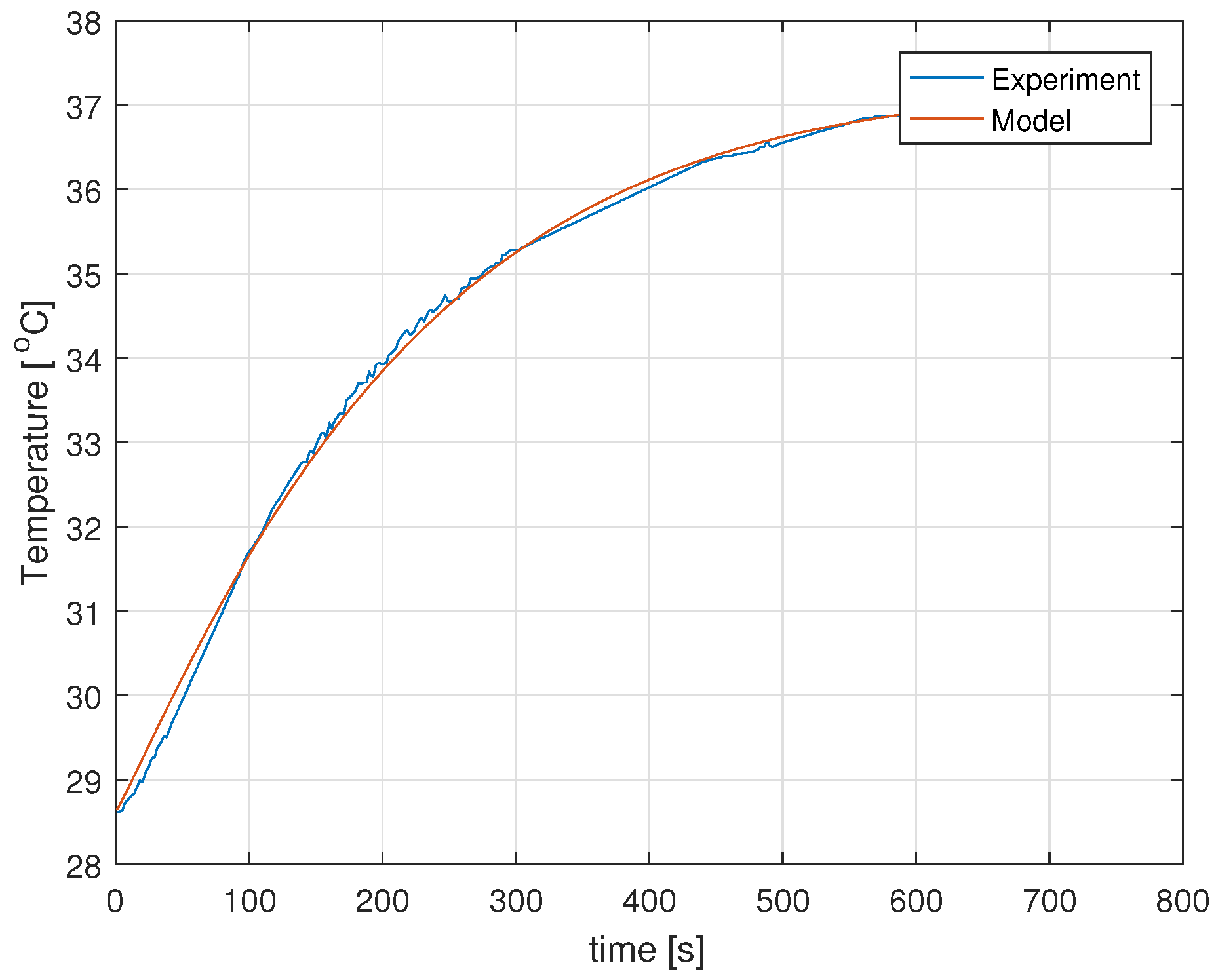
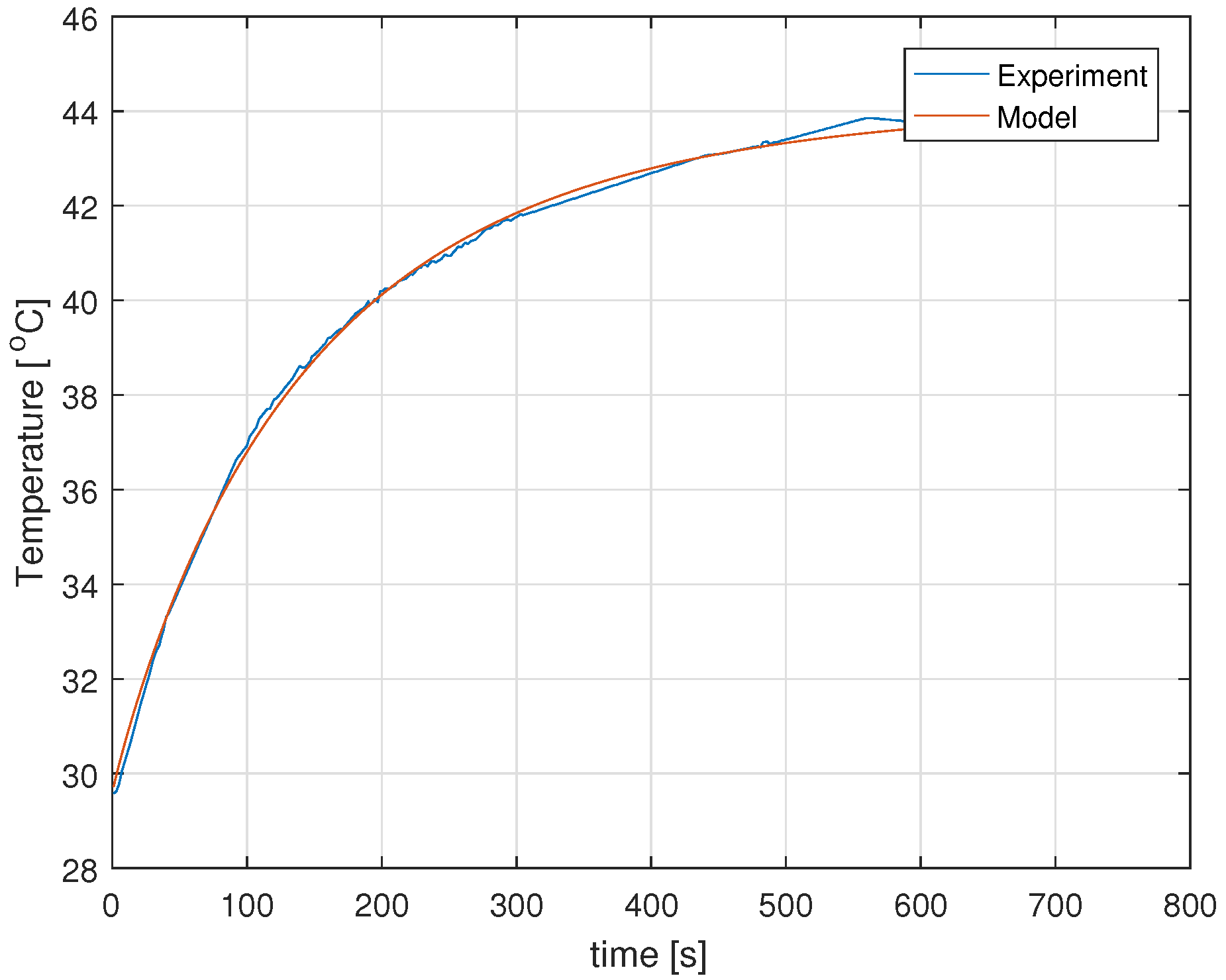
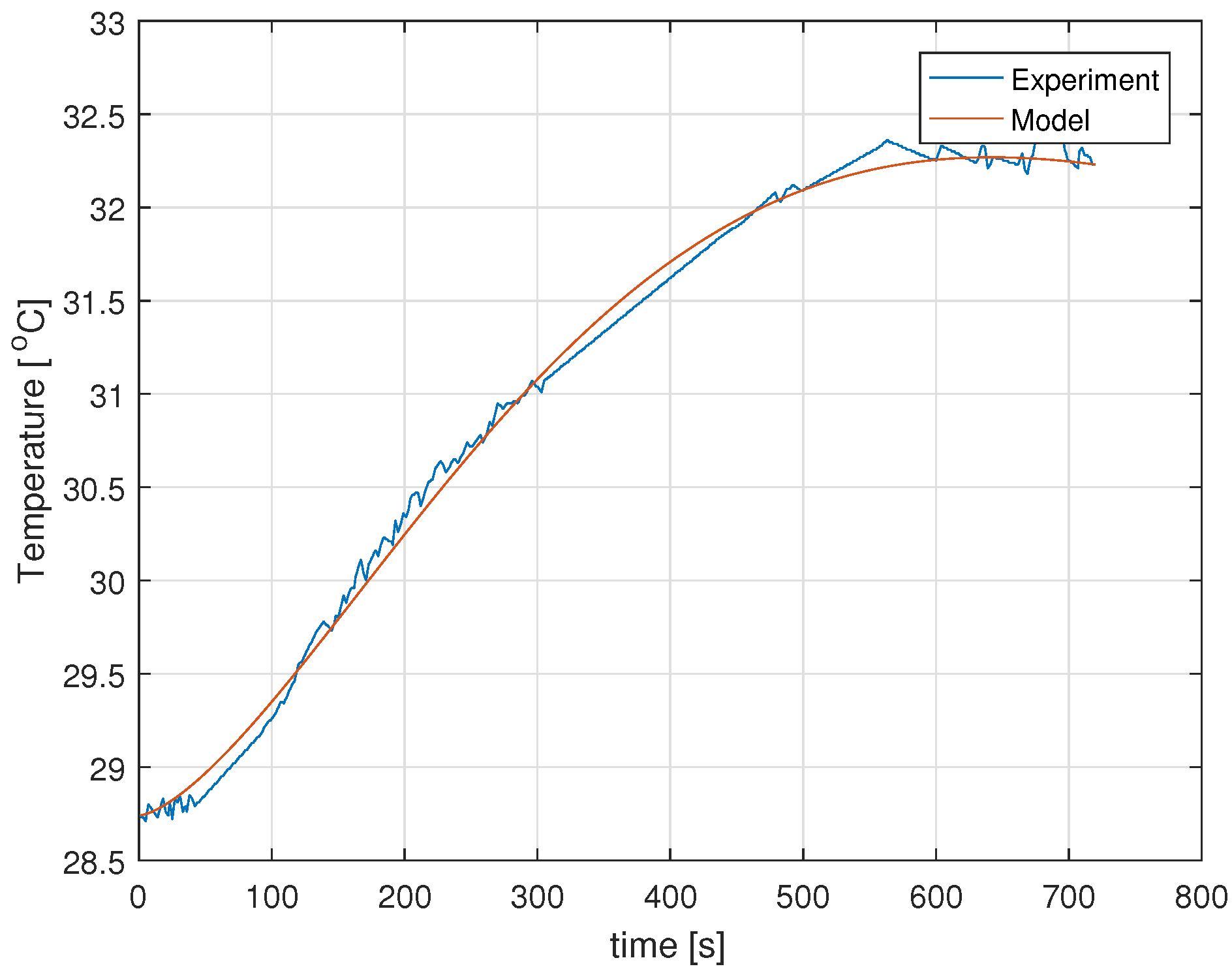
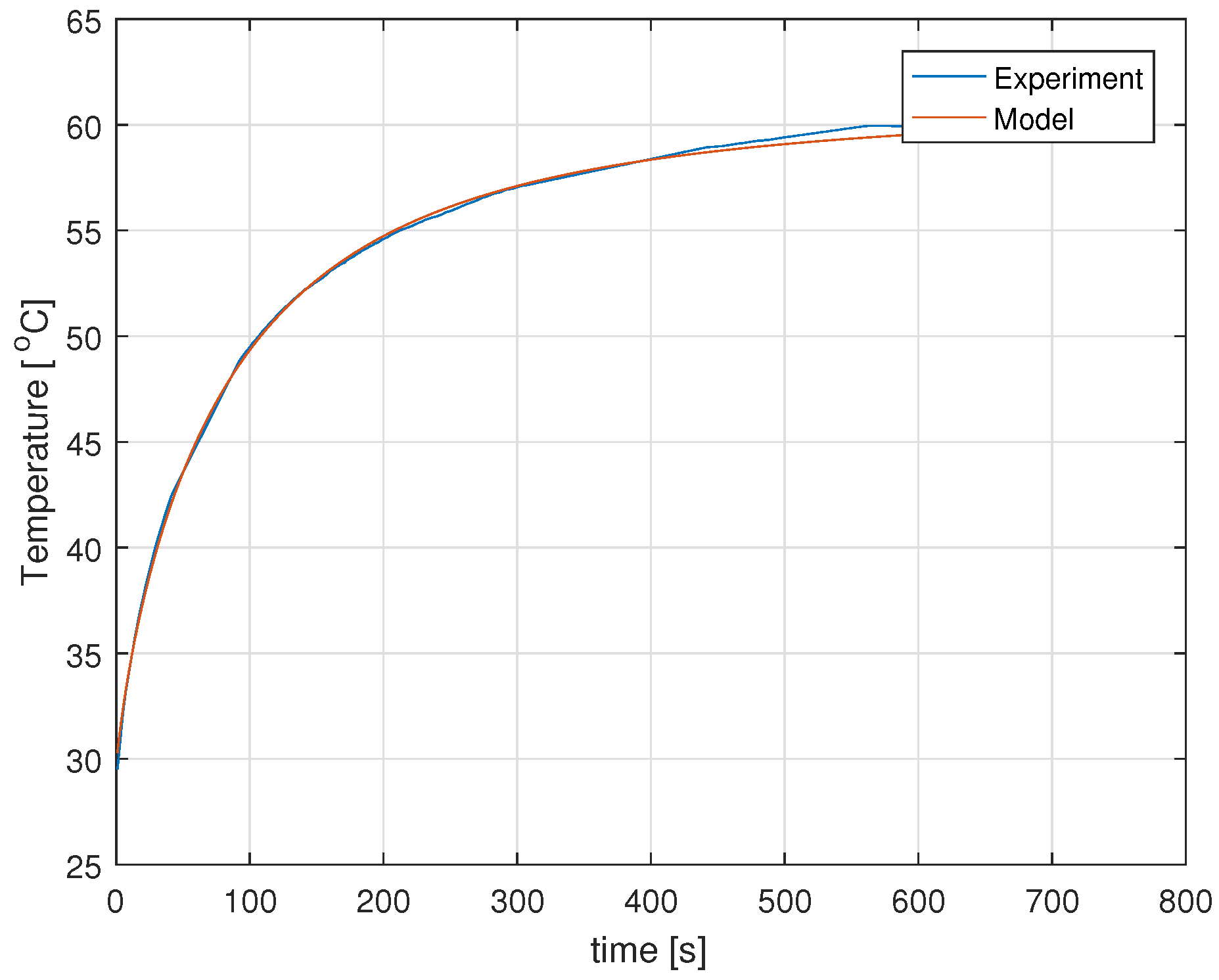
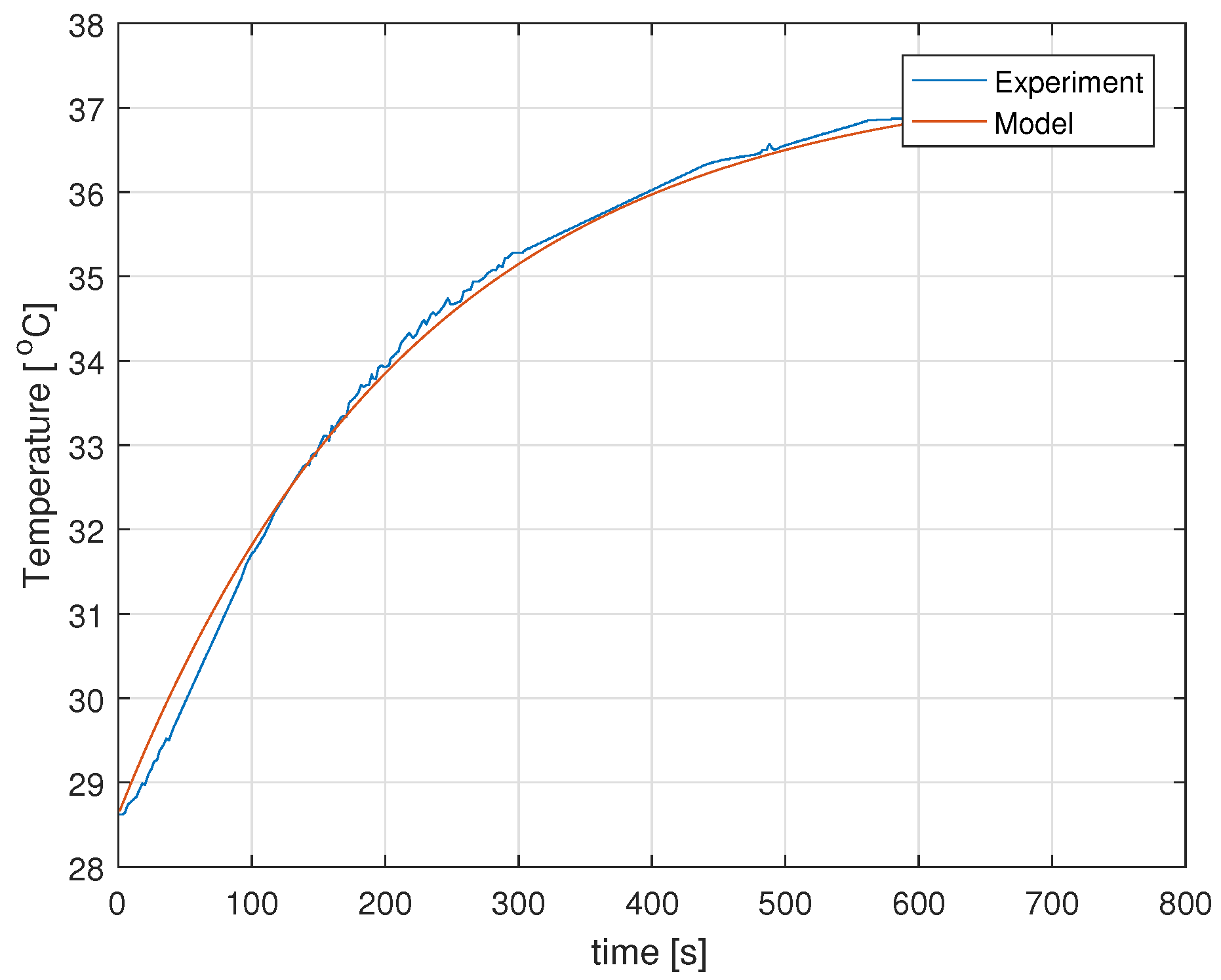
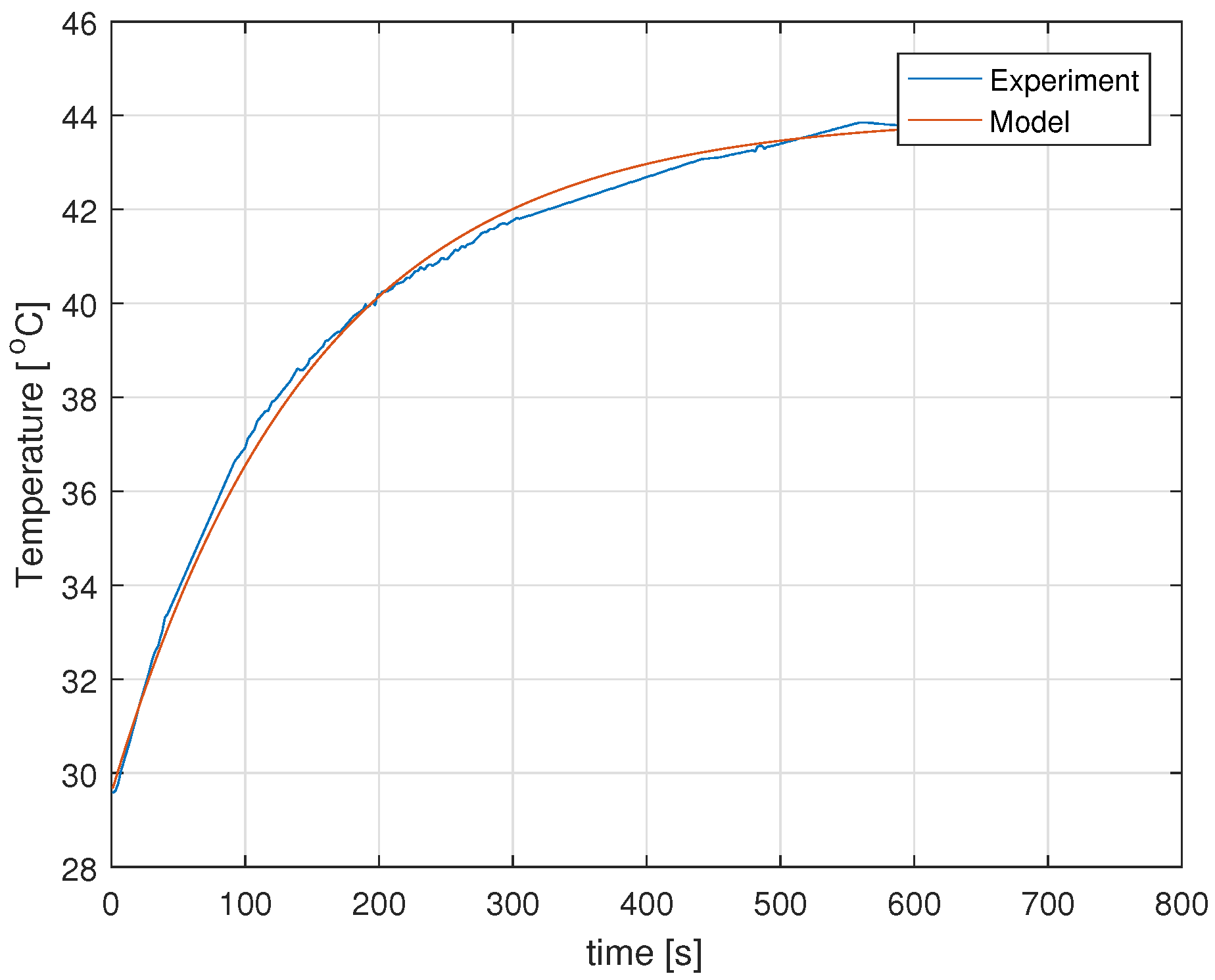
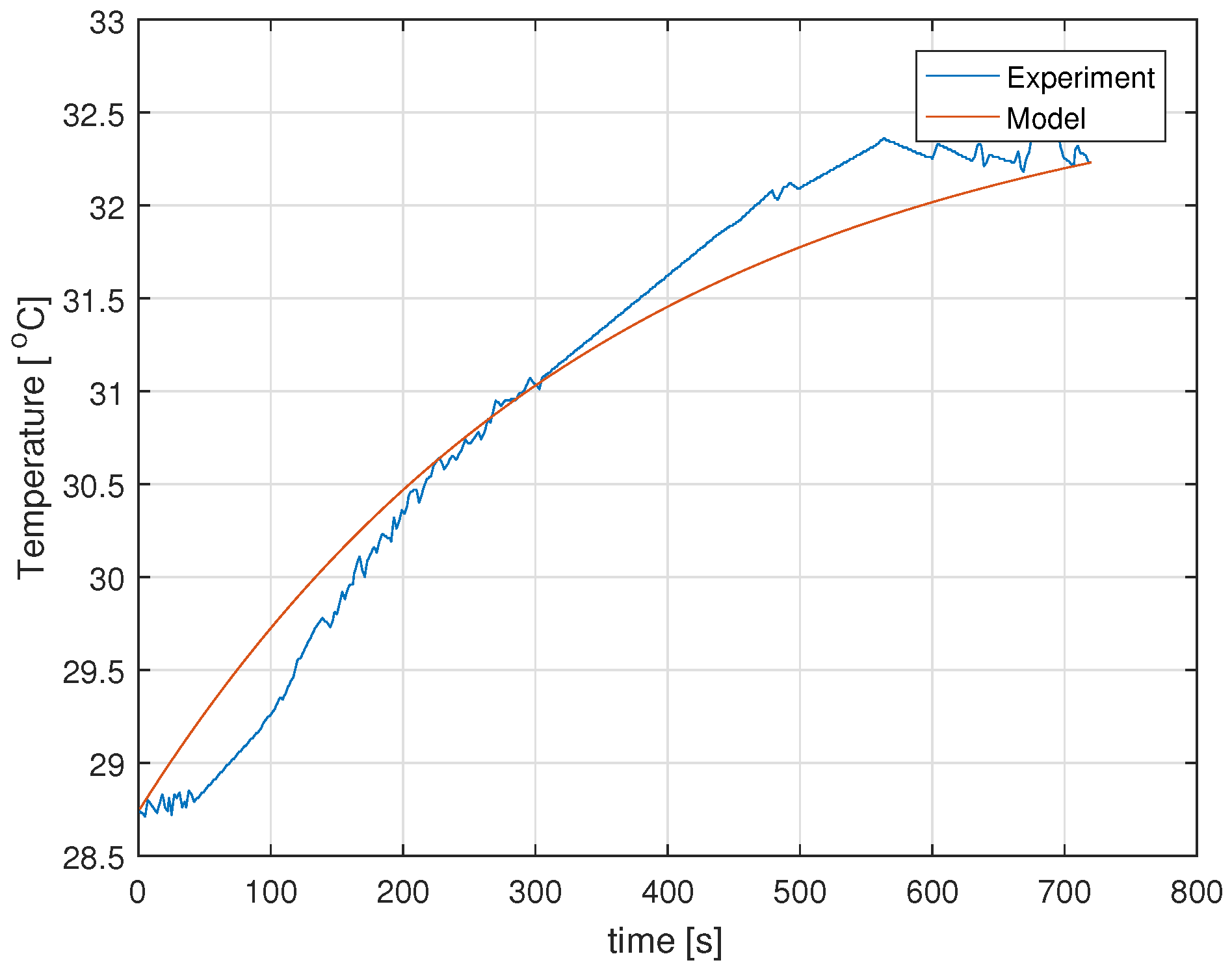
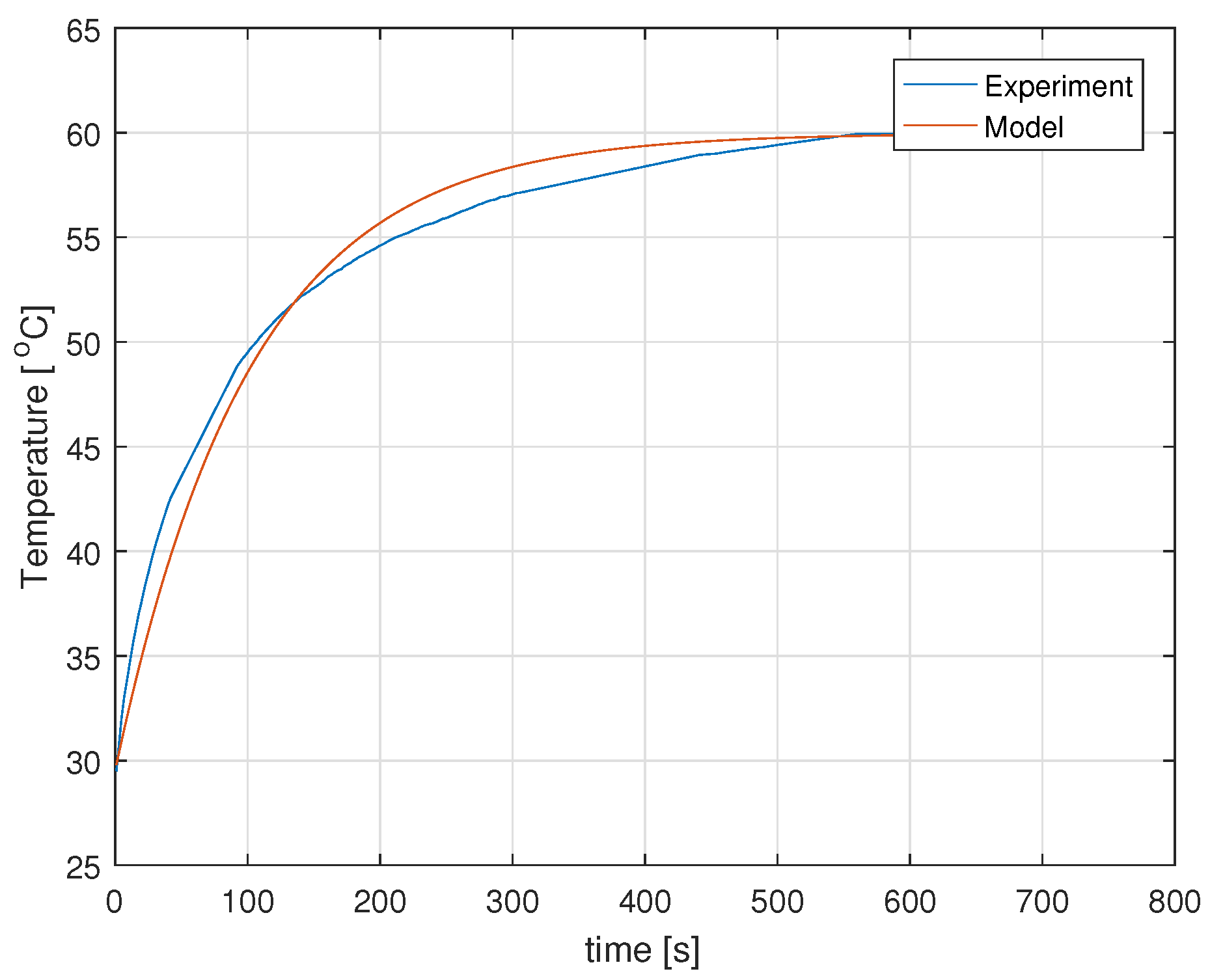
4. Experimental Validation of Results
5. Discussion of Results and Final Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Das, S. Functional Fractional Calculus for System Identification and Controls; Springer: Berlin, Germany, 2010. [Google Scholar]
- Caponetto, R.; Dongola, G.; Fortuna, L.; Petras, I. Fractional Order Systems: Modeling and Control Applications. In World Scientific Series on Nonlinear Science; Chua, L.O., Ed.; University of California: Berkeley, CA, USA, 2010; pp. 1–178. [Google Scholar]
- Dzieliński, A.; Sierociuk, D.; Sarwas, G. Some applications of fractional order calculus. Bull. Pol. Acad. Sci. Tech. Sci. 2010, 58, 583–592. [Google Scholar] [CrossRef] [Green Version]
- Gal, C.; Warma, M. Elliptic and parabolic equations with fractional diffusion and dynamic boundary conditions. Evol. Equ. Control. Theory 2016, 5, 61–103. [Google Scholar]
- Popescu, E. On the fractional Cauchy problem associated with a Feller semigroup. Math. Rep. 2010, 12, 181–188. [Google Scholar]
- Sierociuk, D.; Skovranek, T.; Macias, M.; Podlubny, I.; Petras, I.; Dzielinski, A.; Ziubinski, P. Diffusion process modeling by using fractional-order models. Appl. Math. Comput. 2015, 257, 2–11. [Google Scholar] [CrossRef] [Green Version]
- Gómez, J.F.; Torres, L.; Escobar, R.F. Fractional Derivatives with Mittag-Leffler Kernel. Trends and Applications in Science and Engineering. In Studies in Systems, Decision and Control; Gómez, J.F., Torres, L., Escobar, R.F., Kacprzyk, J., Eds.; Springer: Cham, Switzerland, 2019; Volume 194, pp. 1–339. [Google Scholar]
- Vázquez, L.; Trujillo, J.J.; Velasco, M.P. Fractional Heat Equation and the Second Law of Thermodynamics. Fract. Calc. Appl. Anal. 2011, 14, 334–342. [Google Scholar] [CrossRef]
- Vázquez, J.L. Asymptotic behaviour for the Fractional Heat Equation in the Euclidean space. arXiv 2017, arXiv:math.AP/1708.00821. [Google Scholar] [CrossRef] [Green Version]
- Akbar, M.; Nawaz, R.; Ahsan, S.; Nissar, K.; Abdel-Aty, A.H.; Eleuch, H. New approach to approximate the solution for the system of fractional order Volterra integro-differential equations. Results Phys. 2020, 19, 103453. [Google Scholar] [CrossRef]
- Abdel-Aty, A.H.; Khater, M.; Attia, R.; Abdel-Aty, M.; Eleuch, H. On the new explicit solutions of the fractional nonlinear space-time nucelar model. Fractals 2020, 28, 2040035. [Google Scholar] [CrossRef]
- Dlugosz, M.; Skruch, P. The application of fractional-order models for thermal process modelling inside buildings. J. Build. Phys. 2015, 39, 440–451. [Google Scholar] [CrossRef]
- Ryms, M.; Tesch, K.; Lewandowski, W. The use of thermal imaging camera to estimate velocity profiles based on temperature distribution in a free convection boundary layer. Int. J. Heat Mass Transf. 2021, 165, 120686. [Google Scholar] [CrossRef]
- Obrączka, A. Control of Heat Processes with the Use of Non-Integer Models. Ph.D. Thesis, AGH University, Krakow, Poland, 2014. [Google Scholar]
- Rauh, A.; Senkel, L.; Aschemann, H.; Saurin, V.V.; Kostin, G. An integrodifferential approach to modeling, control, state estimation and optimization for heat transfer systems. Int. J. Appl. Math. Comput. Sci. 2016, 26, 15–30. [Google Scholar] [CrossRef] [Green Version]
- Khan, H.; Shah, R.; Kumam, P.; Arif, M. Analytical Solutions of Fractional-Order Heat and Wave Equations by the Natural Transform Decomposition Method. Entropy 2019, 21, 597. [Google Scholar] [CrossRef] [Green Version]
- Olsen-Kettle, L. Numerical Solution of Partial Differential Equations; The University of Queensland: Queensland, Australia, 2011. [Google Scholar]
- Al-Omari, S.K. A fractional Fourier integral operator and its extension to classes of function spaces. Adv. Differ. Equ. 2018, 1, 1–9. [Google Scholar] [CrossRef]
- Kaczorek, T. Singular fractional linear systems and electrical circuits. Int. J. Appl. Math. Comput. Sci. 2011, 21, 379–384. [Google Scholar] [CrossRef]
- Kaczorek, T.; Rogowski, K. Fractional Linear Systems and Electrical Circuits; Bialystok University of Technology: Bialystok, Poland, 2014. [Google Scholar]
- Podlubny, I. Fractional Differential Equations; Academic Press: San Diego, CA, USA, 1999. [Google Scholar]
- Bandyopadhyay, B.; Kamal, S. Solution, Stability and Realization of Fractional Order Differential Equation. In Stabilization and Control of Fractional Order Systems: A Sliding Mode Approach, Lecture Notes in Electrical Engineering 317; Springer: Cham, Switzerland, 2015; pp. 55–90. [Google Scholar]
- Mozyrska, D.; Girejko, E.; Wyrwas, M. Comparison of h-difference fractional operators. In Advances in the Theory and Applications of Non-Integer Order Systems; Springer: Cham, Switzerland, 2013; pp. 1–178. [Google Scholar]
- Berger, J.; Gasparin, S.; Mazuroski, W.; Mendes, N. An efficient two-dimensional heat transfer model for building envelopes. Numer. Heat Transf. Part A Appl. 2021, 79, 163–194. [Google Scholar] [CrossRef]
- Moitsheki, R.; Rowjee, A. Steady Heat Transfer through a Two-Dimensional Rectangular Straight Fin. Math. Probl. Eng. 2011, 2011, 826819. [Google Scholar] [CrossRef]
- Yang, L.; Sun, B.; Sun, X. Inversion of Thermal Conductivity in Two-Dimensional Unsteady-State Heat Transfer System Based on Finite Difference Method and Artificial Bee Colony. Appl. Sci. 2019, 9, 4824. [Google Scholar] [CrossRef] [Green Version]
- Mitkowski, W. Outline of Control Theory; Publishing House AGH: Kraków, Poland, 2019. [Google Scholar]
- Brzek, M. Detection and Lacalisation Structural Damage in Selected Geometric Domains Using Spectral Theory. Ph.D. Thesis, AGH University, Kraków, Poland, 2019. (In Polish). [Google Scholar]
- Michlin, S.; Smolicki, C. Approximate Methods for Solving Differential and Integral Equations; PWN: Warszawa, Poland, 1970. (In Polish) [Google Scholar]
- Sheng, H.; Chen, Y.; Qiu, T. Fractional Processes and Fractional-Order Signal Processing; Springer: London, UK, 2012. [Google Scholar]
- Oprzędkiewicz, K.; Gawin, E.; Mitkowski, W. Modeling heat distribution with the use of a non-integer order, state space model. Int. J. Appl. Math. Comput. Sci. 2016, 26, 749–756. [Google Scholar] [CrossRef] [Green Version]
- Oprzędkiewicz, K. Non integer order, state space model of heat transfer process using Atangana-Baleanu operator. Bull. Pol. Acad. Sci. Tech. Sci. 2020, 68, 43–50. [Google Scholar]
- Oprzędkiewicz, K.; Mitkowski, W. A memory efficient non integer order discrete time state space model of a heat transfer process. Int. J. Appl. Math. Comput. Sci. 2018, 28, 649–659. [Google Scholar] [CrossRef] [Green Version]
- Oprzędkiewicz, K.; Gawin, E.; Mitkowski, W. Parameter identification for non integer order, state space models of heat plant. In Proceedings of the MMAR 2016: 21th International Conference on Methods and Models in Automation and Robotics, Międzyzdroje, Poland, 29 August–1 September 2016; pp. 184–188. [Google Scholar]
- Oprzędkiewicz, K. Positivity problem for the one dimensional heat transfer process. ISA Trans. 2021, 112, 281–291. [Google Scholar] [CrossRef] [PubMed]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Area | ||||
|---|---|---|---|---|
| 1 | 50 | 75 | 52 | 77 |
| 2 | 200 | 100 | 202 | 102 |
| 3 | 300 | 200 | 302 | 202 |
| 4 | 120 | 40 | 250 | 60 |
| Area | Cost Function MSE (43) | |||
|---|---|---|---|---|
| 1 | 1.0794 | 0.0032 | 0.0032 | 0.0110 |
| 2 | 0.9356 | 0.0008 | 0.0090 | 0.0217 |
| 3 | 1.4877 | 0.0035 | 0.0003 | 0.0059 |
| 4 | 0.8156 | 0.0078 | 0.0235 | 0.0627 |
| Area | Cost Function MSE (43) | ||
|---|---|---|---|
| 1 | 0.0032 | 0.0045 | 0.0233 |
| 2 | 0.0033 | 0.0066 | 0.0497 |
| 3 | 0.0035 | 0.0028 | 0.0664 |
| 4 | 0.0038 | 0.0098 | 1.1448 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Oprzędkiewicz, K.; Mitkowski, W.; Rosół, M. Fractional Order Model of the Two Dimensional Heat Transfer Process. Energies 2021, 14, 6371. https://doi.org/10.3390/en14196371
Oprzędkiewicz K, Mitkowski W, Rosół M. Fractional Order Model of the Two Dimensional Heat Transfer Process. Energies. 2021; 14(19):6371. https://doi.org/10.3390/en14196371
Chicago/Turabian StyleOprzędkiewicz, Krzysztof, Wojciech Mitkowski, and Maciej Rosół. 2021. "Fractional Order Model of the Two Dimensional Heat Transfer Process" Energies 14, no. 19: 6371. https://doi.org/10.3390/en14196371