
Monitoring the Geometry Morphology of Complex Hydraulic Fracture Network by Using a Multiobjective Inversion Algorithm Based on Decomposition

Abstract
:1. Introduction
2. The Theoretical Basis and Establishment of the Fracture Model
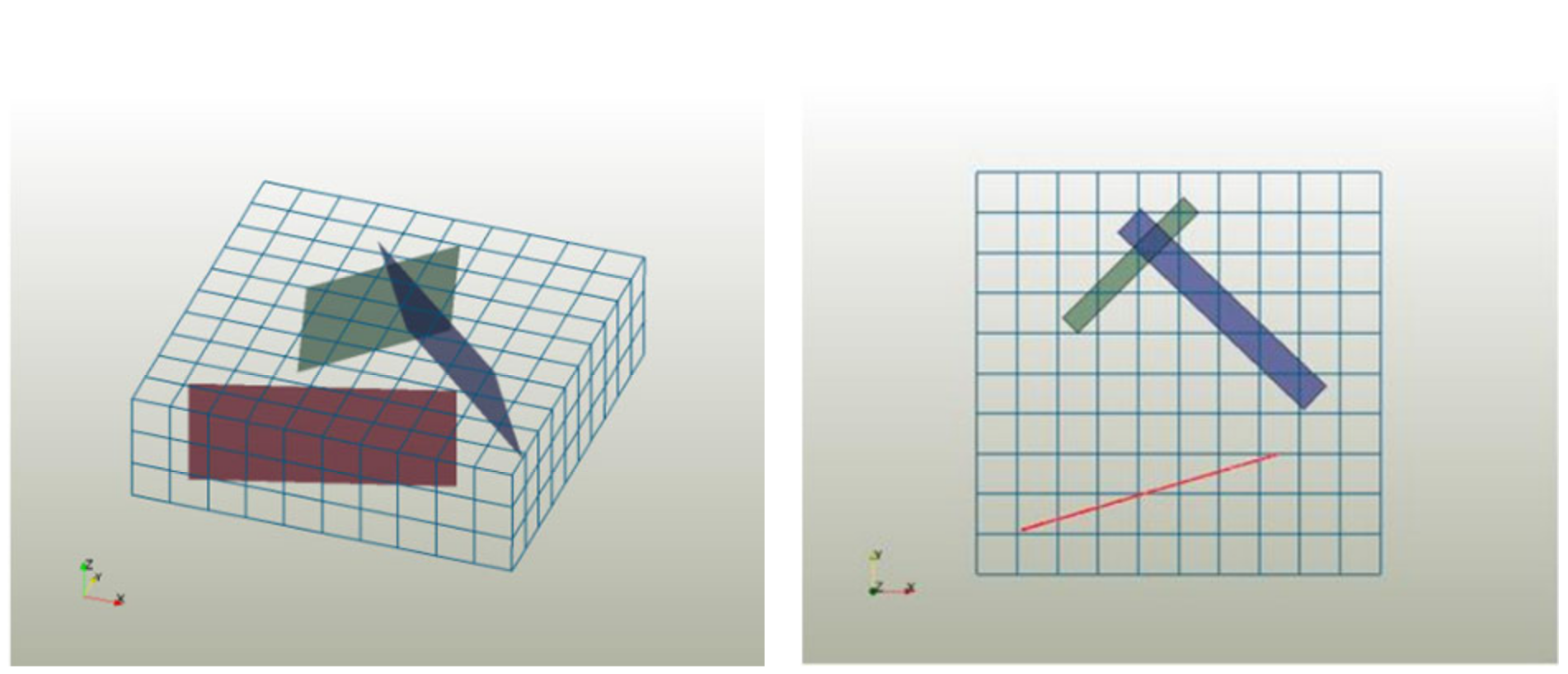
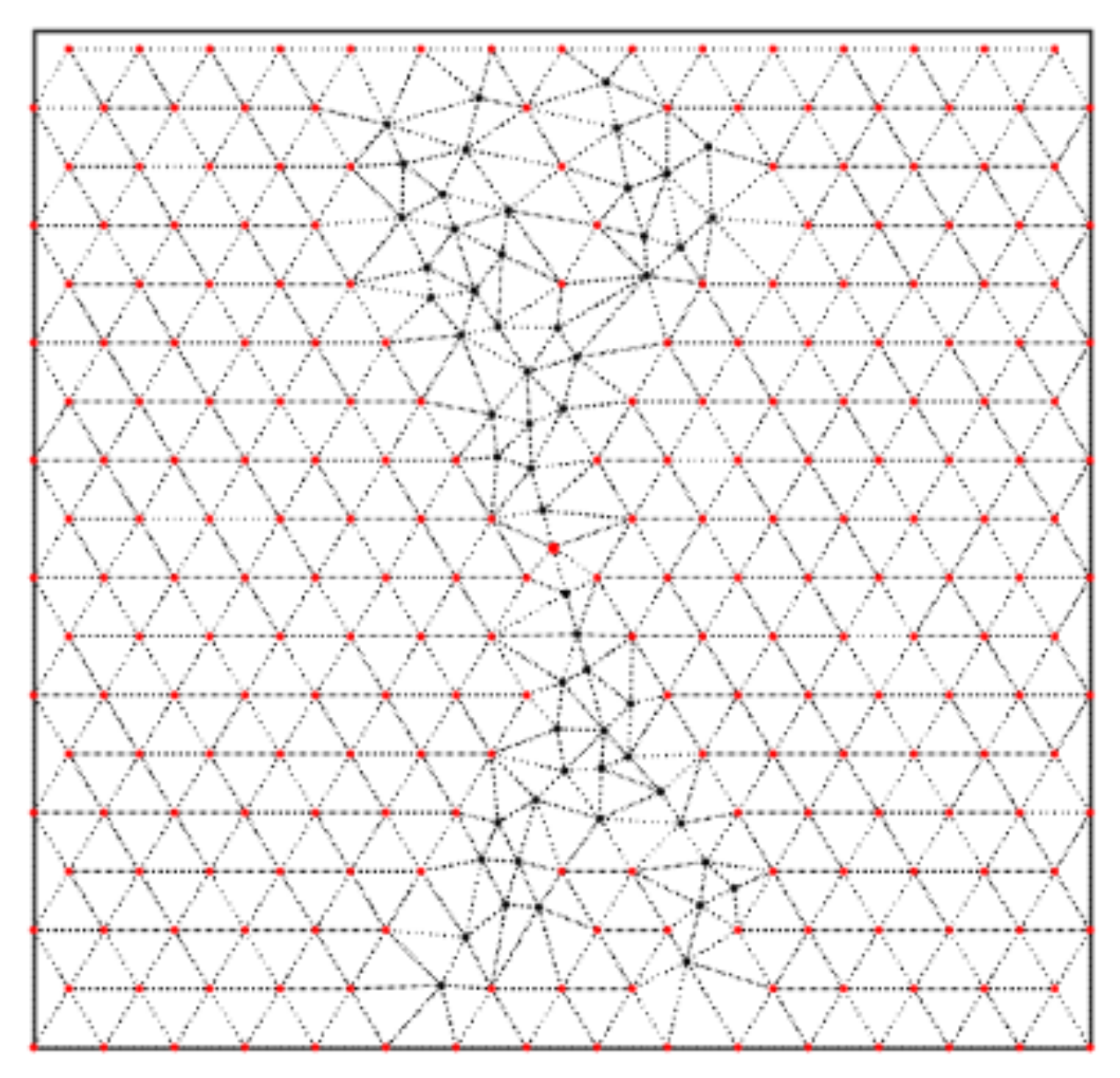
2.1. Embedded Discrete Fracture Model (EDFM)
2.2. Hydraulic Fracture Network Geometry Model Design
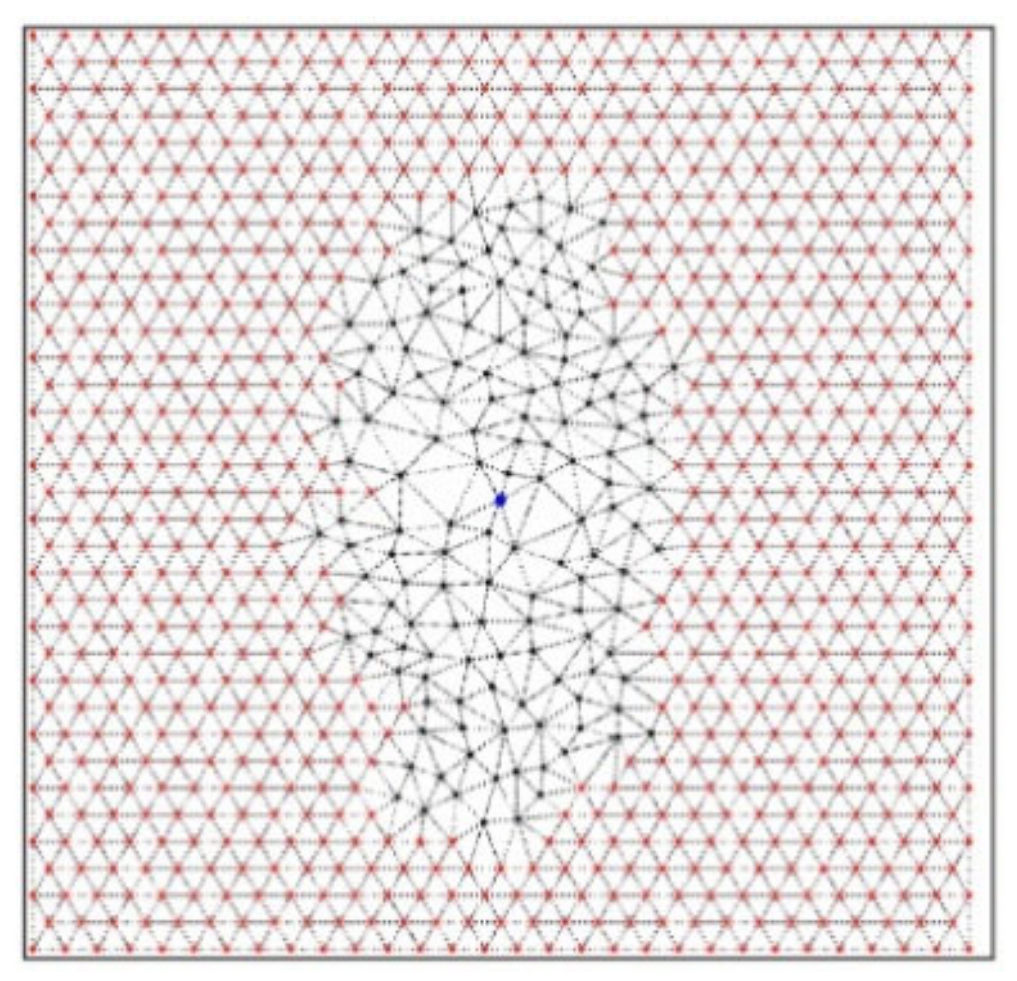
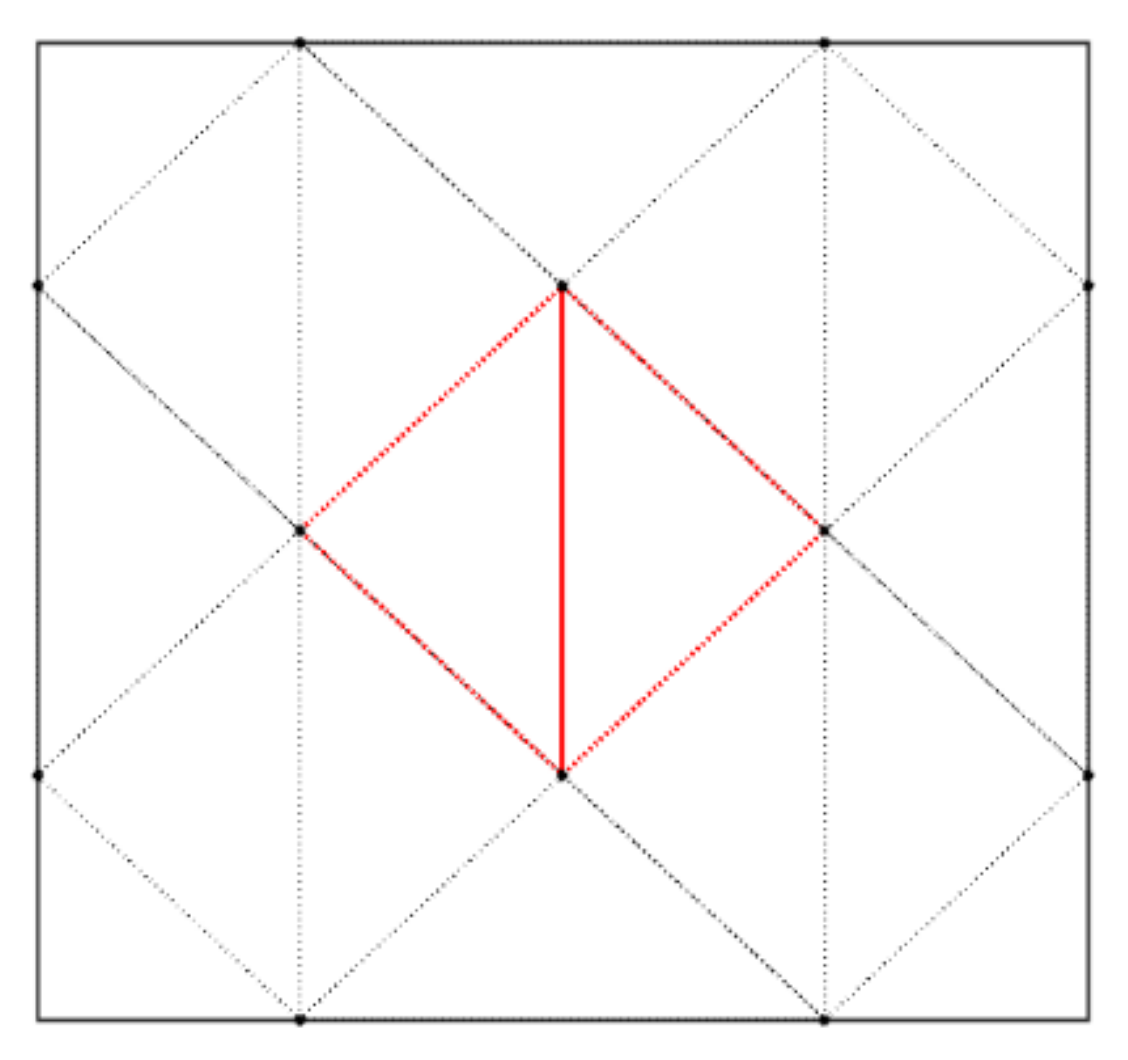
2.2.1. The Delaunay Triangulation Method
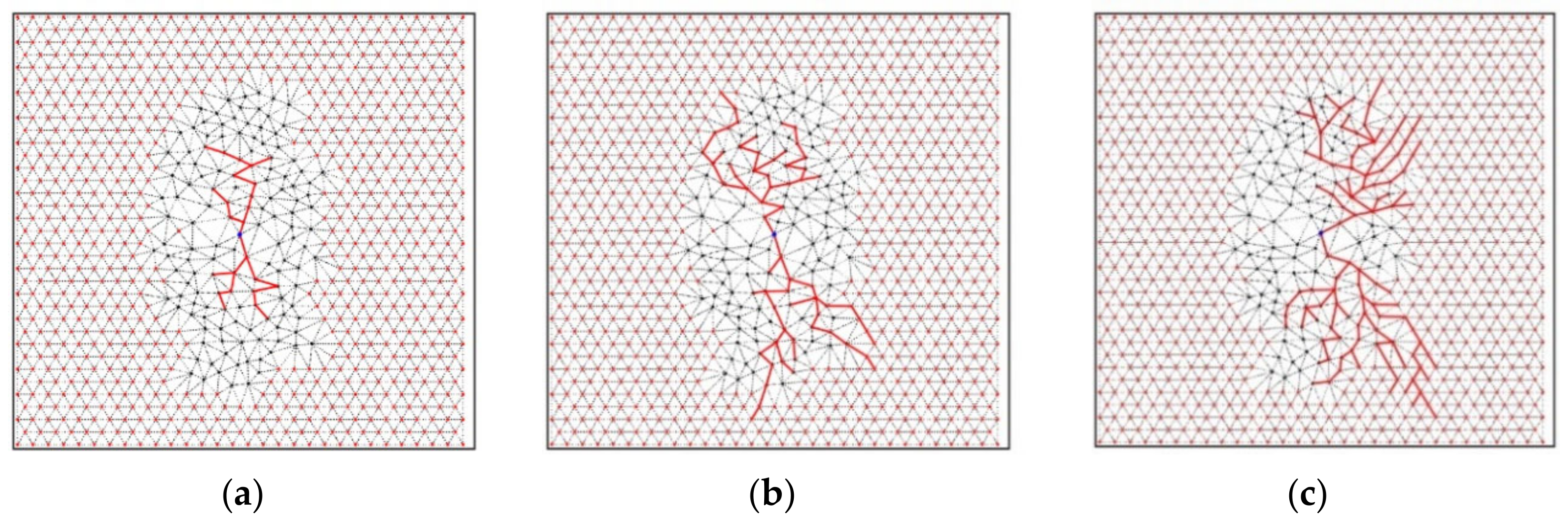
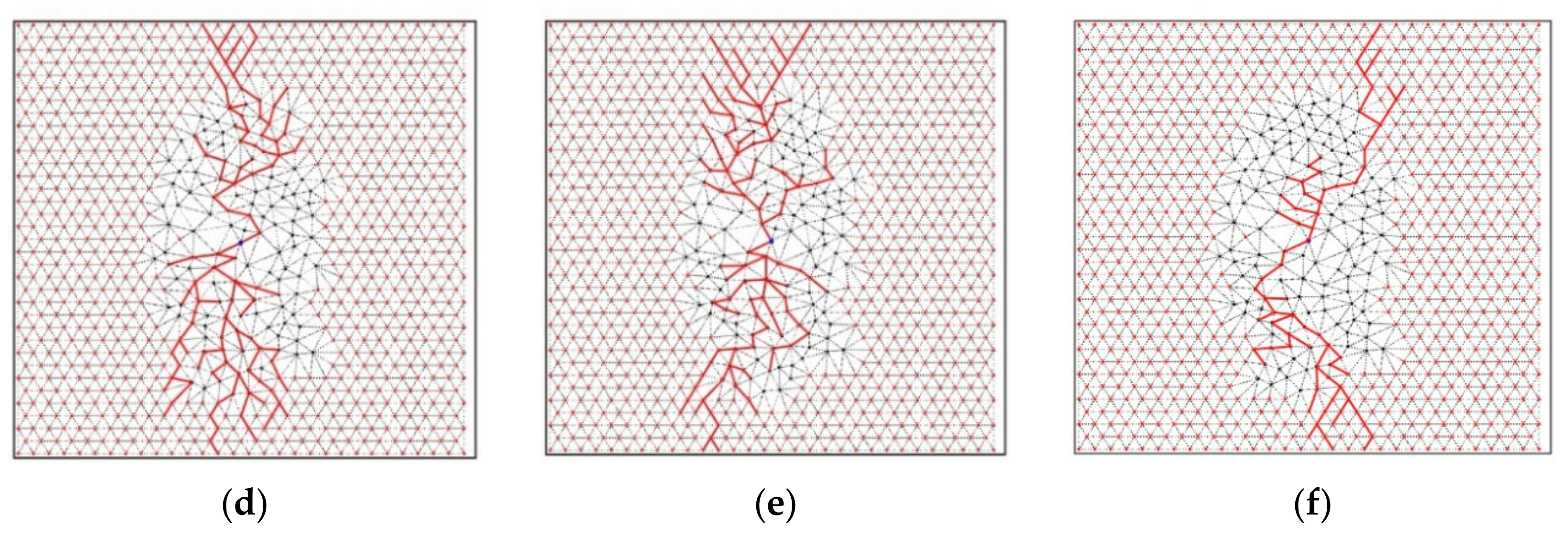
2.2.2. Complex Hydraulic Fracture Network Generation Method Based on the L-System
- If c > 0.75, F → F[+F][−F]F;
- If 0.75 > c > 0.50, F → F;
- If 0.50 > c > 0.25, F → F − F;
- If 0.25 > c, F → F + F.
3. Multiobjective Fracture Network Inversion Algorithm Based on Decomposition (MOFNIAD)
3.1. The Bayesian Objective Function
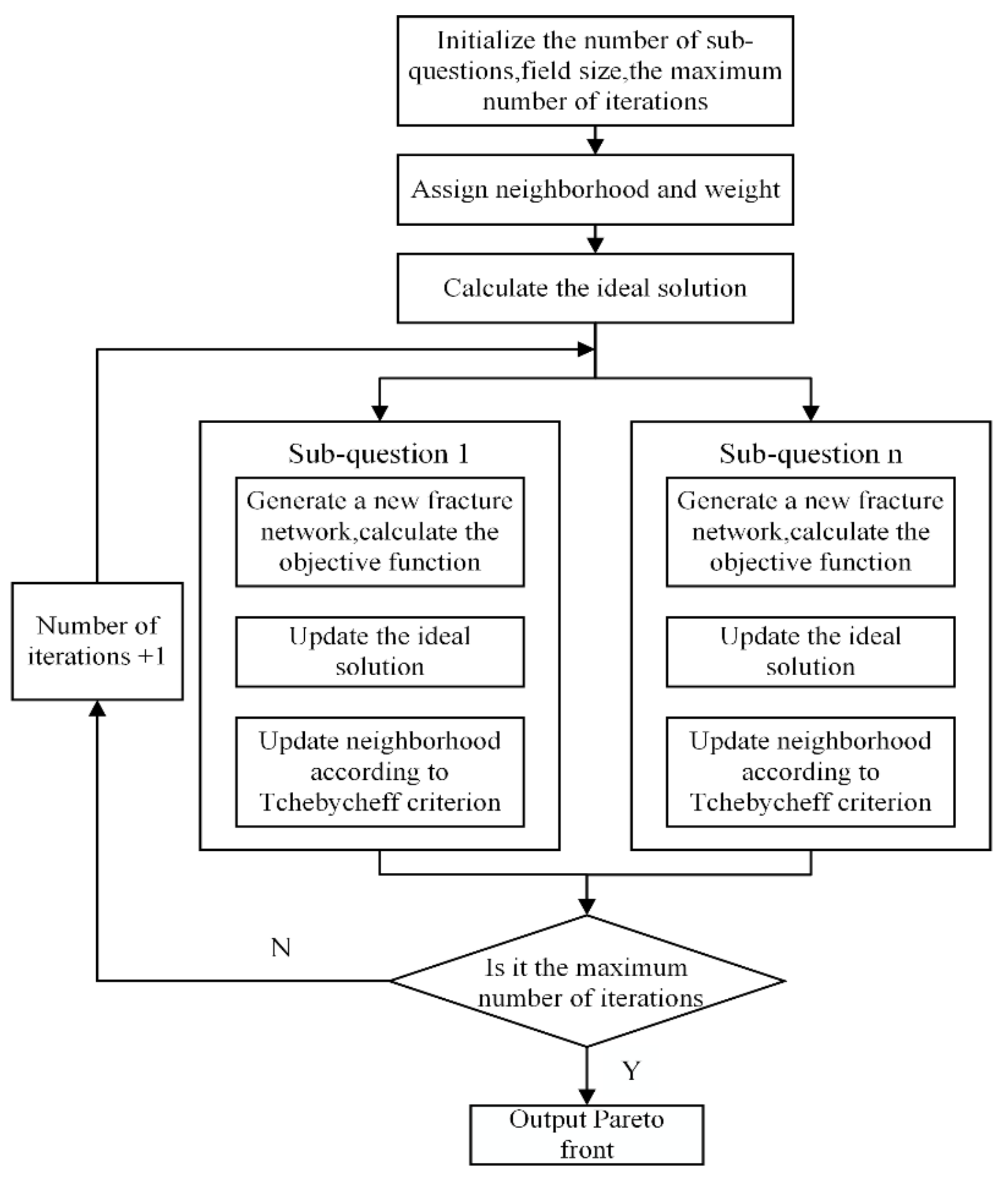
3.2. Multiobjective Fracture Network Inversion Algorithm Based on Decomposition
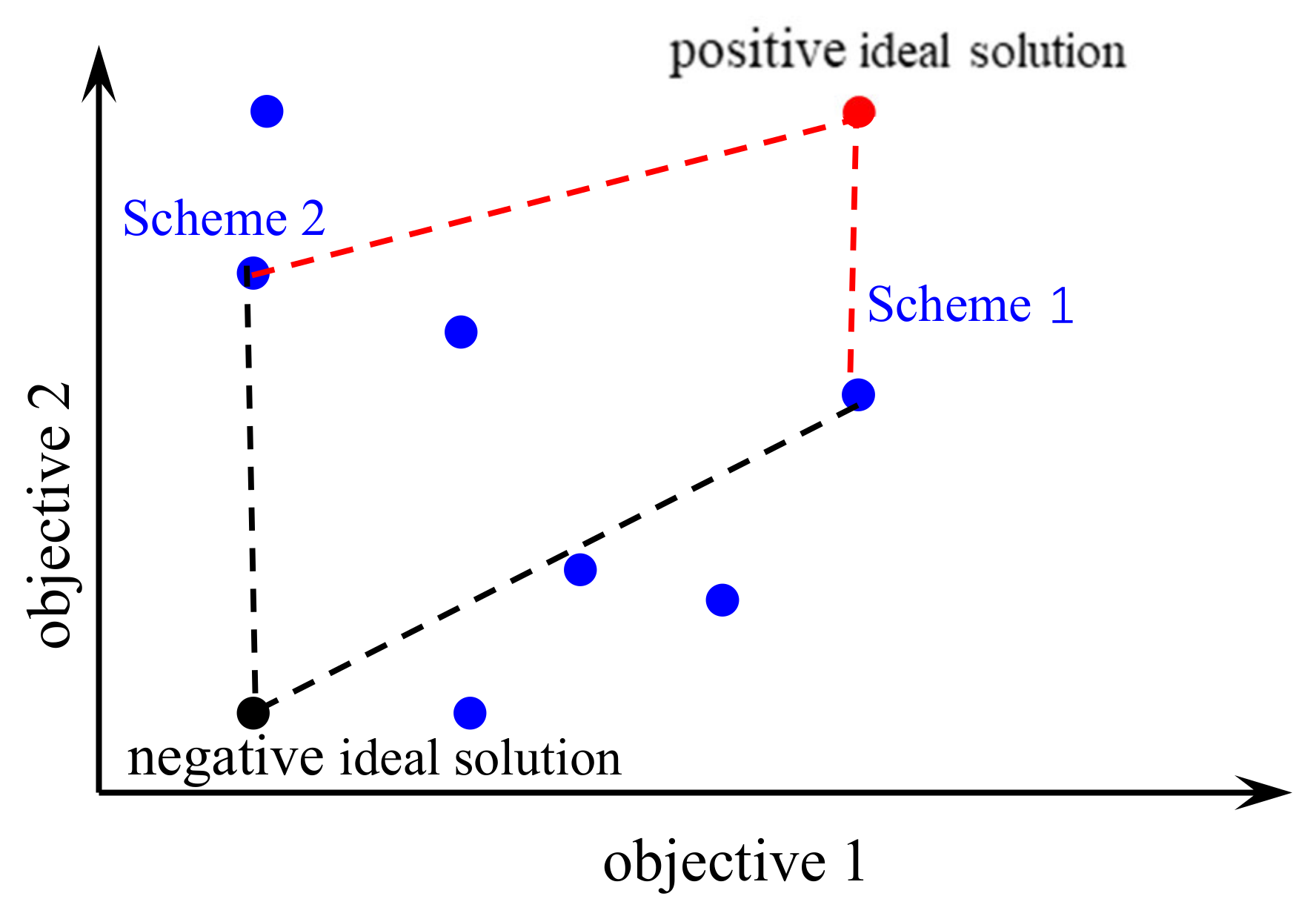
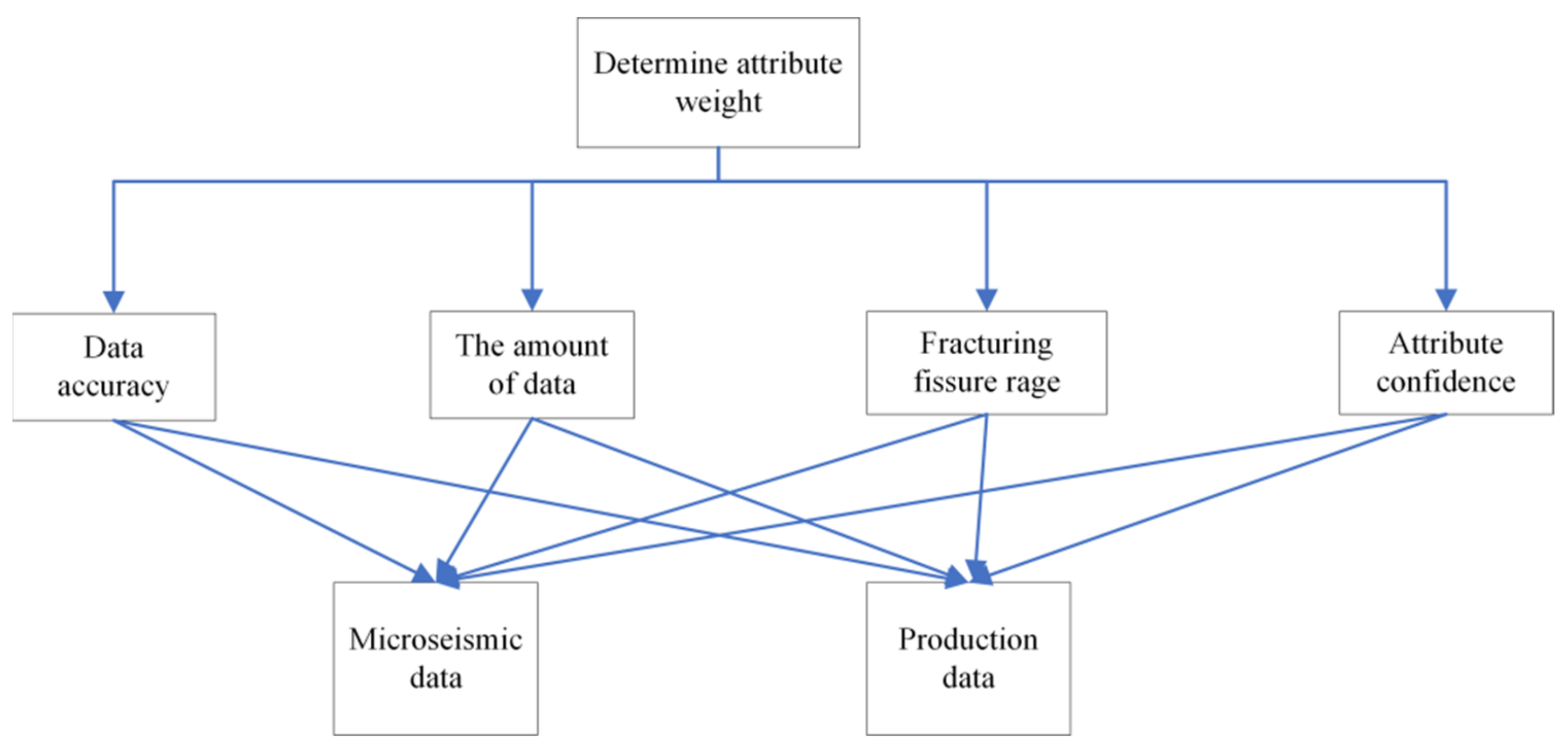
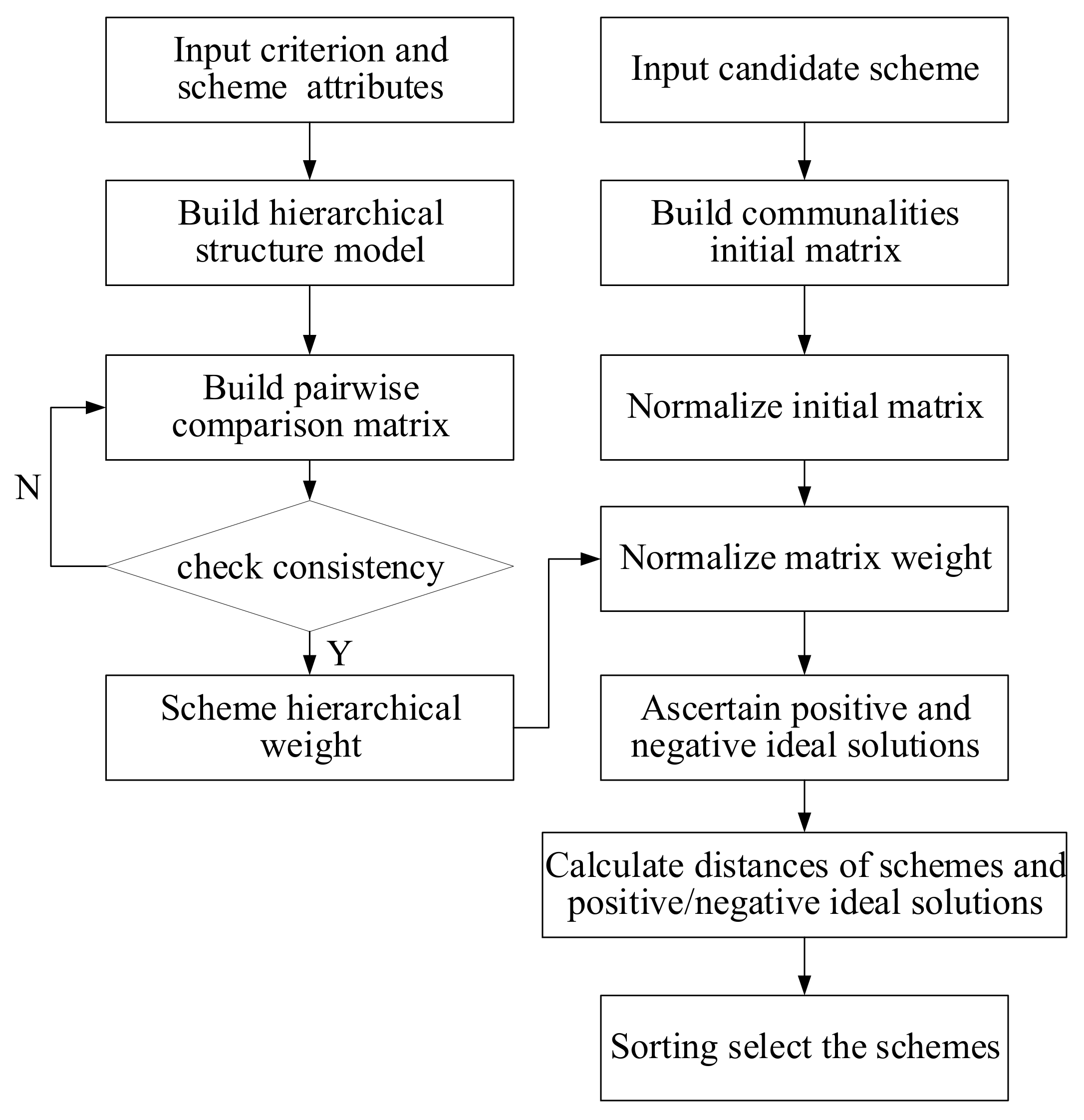
3.3. Multiple Criteria Decision Making
4. Results and Discussion
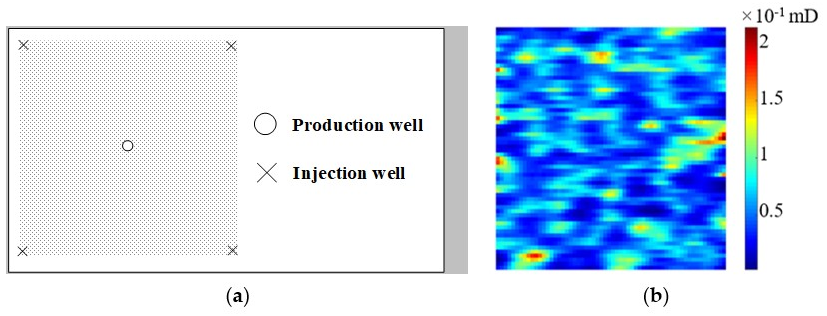
4.1. Reservoir Model
4.2. Case 1
4.3. Case 2
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhang, K.; Zhao, X.; Zhang, L.; Zhang, H.; Wang, H.; Chen, G.; Zhao, M.; Jiang, Y.; Yao, J. Current status and prospect for the research and application of big data and intelligent optimization methods in oilfield development. Zhongguo Shiyou Daxue Xuebao (Ziran Kexue Ban)/J. China Univ. Pet. (Ed. Nat. Sci.) 2020, 44, 28–38. [Google Scholar]
- Xu, X.; Wei, Z.; Ji, Q.; Wang, C.; Gao, G. Global renewable energy development: Influencing factors, trend predictions and countermeasures. Resour. Policy 2019, 63, 101470. [Google Scholar] [CrossRef]
- Krohn, C.E. Fractal measurements of sandstones, shales, and carbonates. J. Geophys. Res. Solid Earth 1988, 93, 3297–3305. [Google Scholar] [CrossRef]
- Ho, W. Integrated analytic hierarchy process and its applications—A literature review. Eur. J. Oper. Res. 2008, 186, 211–228. [Google Scholar] [CrossRef]
- Hwang, C.L.; Yoon, K. Multiple Attribute Decision Making Methods and Applications A State-of-the-Art Survey; Springer: Berlin/Heidelberg, Germany, 1981; Volume 186. [Google Scholar]
- Meyer, B.R.; Bazan, L.W. A Discrete Fracture Network Model for Hydraulically Induced Fractures—Theory, Parametric and Case Studies. In Proceedings of the SPE Hydraulic Fracturing Technology Conference, The Woodlands, TX, USA, 24–26 January 2011. [Google Scholar]
- Maxwell, S.C.; Urbancic, T.I.; Steinsberger, N.; Zinno, R. Microseismic Imaging of Hydraulic Fracture Complexity in the Barnett Shale. In Proceedings of the SPE Annual Technical Conference and Exhibition, San Antonio, TX, USA, 29 September–2 October 2002. [Google Scholar]
- Miettinen, K. Nonlinear Multiobjective Optimization; Springer: Boston, MA, USA, 1998. [Google Scholar]
- Dahi Taleghani, A. Analysis of hydraulic fracture propagation in fractured reservoirs: An improved model for the interaction between induced and natural fractures. Ph.D. Thesis, The University of Texas, Austin, TX, USA, May 2009. [Google Scholar]
- Sasaki, S. Characteristics of microseismic events induced during hydraulic fracturing experiments at the Hijiori hot dry rock geothermal energy site, Yamagata, Japan. Tectonophysics 1998, 289, 171–188. [Google Scholar] [CrossRef]
- Hainey, B.W.; Keck, R.G.; Smith, M.B.; Lynch, K.W.; Barth, J.W. On-site Fracturing Disposal of Oilfield-Waste Solids in Wilmington Field, California. SPE Prod. Facil. 1999, 14, 83–87. [Google Scholar] [CrossRef]
- Raaen, A.M.; Skomedal, E.; Kjørholt, H.; Markestad, P.; Økland, D. Stress determination from hydraulic fracturing tests: The system stiffness approach. Int. J. Rock Mech. Min. Sci. 2001, 38, 529–541. [Google Scholar] [CrossRef]
- Murdoch, L.C.; Slack, W.W. Forms of Hydraulic Fractures in Shallow Fine-Grained Formations. J. Geotech. Geoenvironmental Eng. 2002, 128, 479–487. [Google Scholar] [CrossRef]
- Olson, D.L. Comparison of weights in TOPSIS models. Math. Comput. Model. 2004, 40, 721–727. [Google Scholar] [CrossRef]
- Nordgren, R.P. Propagation of a Vertical Hydraulic Fracture. Soc. Pet. Eng. J. 1972, 12, 306–314. [Google Scholar] [CrossRef]
- Olson, J.E. Multi-fracture propagation modeling: Applications to hydraulic fracturing in shales and tight gas sands. In Proceedings of the 42nd U.S. Rock Mechanics Symposium (USRMS), San Francisco, CA, USA, 29 June–2 July 2008. [Google Scholar]
- Perkins, T.K.; Kern, L.R. Widths of Hydraulic Fractures. J. Pet. Technol. 1961, 13, 937–949. [Google Scholar] [CrossRef]
- Barree, R.D.; Fisher, M.K.; Woodroof, R.A. A Practical Guide to Hydraulic Fracture Diagnostic Technologies. Proceedings of th SPE Annual Technical Conference and Exhibitioen, San Antonio, TX, USA, 29 September–2 October 2002. [Google Scholar]
- Cipolla, C.L.; Wright, C.A. State-of-the-Art in Hydraulic Fracture Diagnostics. In Proceedings of the SPE Asia Pacific Oil and Gas Conference and Exhibition, Brisbane, Australia, 16–18 October 2000. [Google Scholar]
- Germanovich, L.N.; Astakhov, D.K.; Mayerhofer, M.J.; Shlyapobersky, J.; Ring, L.M. Hydraulic fracture with multiple segments I. Observations and model formulation. Int. J. Rock Mech. Min. Sci. 1997, 34, 97.e1–97.e19. [Google Scholar] [CrossRef]
- Develi, K.; Babadagli, T. Quantification of Natural Fracture Surfaces Using Fractal Geometry. Math. Geol. 1998, 30, 971–998. [Google Scholar] [CrossRef]
- Geertsma, J.; De Klerk, F. A Rapid Method of Predicting Width and Extent of Hydraulically Induced Fractures. J. Pet. Technol. 1969, 21, 1571–1581. [Google Scholar] [CrossRef]
- Ren, L.; Zhao, J.; Hu, Y. Hydraulic fracture extending into network in shale: Reviewing influence factors and their mechanism. Sci. World J. 2014, 2014, 847107. [Google Scholar] [CrossRef] [PubMed]
- Xue, Z.; Yang, L.; Cui, L. Roundup of Fracture Detection Techniques During Hydraulic Fracturing Operation at Home & Abroad. Low Permeability Oil Gas Fields 2010, 3, 90–95. [Google Scholar]
- Liu, Z.; Sa, L.; Wu, F.; Dong, S.; Li, Y. Microseismic monitor technology status for unconventional resource E&P and its future development in CNPC. Shiyou Diqiu Wuli Kantan/Oil Geophys. Prospect. 2013, 48, 843–853. [Google Scholar]
- Chen, Y.; Hong, L.; Yalin, L.; Furong, W.; Guangming, H.; Chunhua, C. The precision analysis of the microseismic location. Prog. Geophys. 2013, 28, 800–807. [Google Scholar]
- Wright, C.A.; Weijers, L.; Davis, E.J.; Mayerhofer, M. Understanding Hydraulic Fracture Growth: Tricky but Not Hopeless. In Proceedings of the SPE Annual Technical Conference and Exhibition, Houston, TX, USA, 3–6 October 1999. [Google Scholar]
- Shewchuk, J.R. Delaunay refinement algorithms for triangular mesh generation. Comput. Geom. 2002, 22, 21–74. [Google Scholar] [CrossRef] [Green Version]
- Vaidya, O.S.; Kumar, S. Analytic hierarchy process: An overview of applications. Eur. J. Oper. Res. 2006, 169, 1–29. [Google Scholar] [CrossRef]
- Weng, X.; Kresse, O.; Cohen, C.; Wu, R.; Gu, H. Modeling of Hydraulic Fracture Network Propagation in a Naturally Fractured Formation. In Proceedings of the SPE Hydraulic Fracturing Technology Conference, The Woodlands, TX, USA, 24–26 January 2011. [Google Scholar]
- Wendong, W. Fractal-based Multi-stage Hydraulically Fracture Network Characterization and Flow Modeling. Ph.D. Thesis, China University of Petroleum (East China), Dongying, China, December 2015. [Google Scholar]
- Chaoyang, H.; Chi, A.; Fengjiao, W. Distribution simulation of branched hydraulic fracture based on fractal theory. Pet. Geol. Recovery Effic. 2016, 23, 122–126. [Google Scholar]
- Zhang, Q.; Li, H. MOEA/D: A Multiobjective Evolutionary Algorithm Based on Decomposition. IEEE Trans. Evol. Comput. 2007, 11, 712–731. [Google Scholar] [CrossRef]
- Xu, W.; Thiercelin, M.; Ganguly, U.; Weng, X.; Gu, H.; Onda, H.; Sun, J.; Le Calvez, J. Wiremesh: A Novel Shale Fracturing Simulator. In Proceedings of the International Oil and Gas Conference and Exhibition in China, Beijing, China, 8–10 June 2010. [Google Scholar]
- Yang, F.; Ning, Z.; Liu, H. Fractal characteristics of shales from a shale gas reservoir in the Sichuan Basin, China. Fuel 2014, 115, 378–384. [Google Scholar] [CrossRef]
- Zhang, D.; Yang, T. Environmental impacts of hydraulic fracturing in shale gas development in the United States. Pet. Explor. Dev. 2015, 42, 876–883. [Google Scholar] [CrossRef]
- Yushi, Z.; Shicheng, Z.; Tong, Z.; Xiang, Z.; Tiankui, G. Experimental Investigation into Hydraulic Fracture Network Propagation in Gas Shales Using CT Scanning Technology. Rock Mech. Rock Eng. 2016, 49, 33–45. [Google Scholar] [CrossRef]
- Zhou, Z.; Su, Y.; Wang, W.; Yan, Y. Application of the fractal geometry theory on fracture network simulation. J. Pet. Explor. Prod. Technol. 2017, 7, 487–496. [Google Scholar] [CrossRef] [Green Version]
- Zhang, K.; Zhang, J.; Ma, X.; Yao, C.; Zhang, L.; Yang, Y.; Wang, J.; Yao, J.; Zhao, H. History Matching of Naturally Fractured Reservoirs Using a Deep Sparse Autoencoder. SPE J. 2021, 26, 1700–1721. [Google Scholar] [CrossRef]
- Xue, X.; Zhang, K.; Tan, K.C.; Feng, L.; Wang, J.; Chen, G.; Zhao, X.; Zhang, L.; Yao, J. Affine Transformation-Enhanced Multifactorial Optimization for Heterogeneous Problems. IEEE Trans. Cybern. 2020, 1–15, in press. [Google Scholar] [CrossRef] [PubMed]
- Ma, X.; Zhang, K.; Zhang, L.; Yao, C.; Yao, J.; Wang, H.; Jian, W.; Yan, Y. Data-Driven Niching Differential Evolution with Adaptive Parameters Control for History Matching and Uncertainty Quantification. SPE J. 2021, 26, 993–1010. [Google Scholar] [CrossRef]
- Chen, G.; Zhang, K.; Zhang, L.; Xue, X.; Ji, D.; Yao, C.; Yao, J.; Yang, Y. Global and local surrogate-model-assisted differential evolution for waterflooding production optimization. SPE J. 2020, 25, 105–118. [Google Scholar] [CrossRef]
- Yin, F.; Xue, X.; Zhang, C.; Zhang, K.; Han, J.; Liu, B.; Wang, J.; Yao, J. Multifidelity genetic transfer: An efficient framework for production optimization. SPE J. 2021, 26, 1614–1635. [Google Scholar] [CrossRef]
- Barenblatt, G.I.; Zheltov, I.P.; Kochina, I.N. Basic concepts in the theory of seepage of homogeneous liquids in fissured rocks [strata]. J. Appl. Math. Mech. 1960, 24, 1286–1303. [Google Scholar] [CrossRef]
- Warren, J.E.; Root, P.J. The Behavior of Naturally Fractured Reservoirs. Soc. Pet. Eng. J. 1963, 3, 245–255. [Google Scholar] [CrossRef] [Green Version]
- Noorishad, J.; Mehran, M. An upstream finite element method for solution of transient transport equation in fractured porous media. Water Resour. Res. 1982, 18, 588–596. [Google Scholar] [CrossRef] [Green Version]
- Karimi-Fard, M.; Durlofsky, L.J.; Aziz, K. An Efficient Discrete-Fracture Model Applicable for General-Purpose Reservoir Simulators. SPE J. 2004, 9, 227–236. [Google Scholar] [CrossRef]
- Mahmood, S. Modeling and simulation of fluid flow in naturally and hydraulically fractured reservoirs using embedded discrete fracture model (EDFM). Master’s Thesis, The University of Texas at Austin, Austin, TX, USA, December 2014. [Google Scholar]
- Shah, S.; Møyner, O.; Tene, M.; Lie, K.-A.; Hajibeygi, H. The multiscale restriction smoothed basis method for fractured porous media (F-MsRSB). J. Comput. Phys. 2016, 318, 36–57. [Google Scholar] [CrossRef] [Green Version]
- Lie, K.A. An Introduction to Reservoir Simulation Using MATLAB: User Guide for the Matlab Reservoir Simulation Toolbox (MRST); Cambridge University Press: Cambridge, UK, 2019. [Google Scholar]
- Lee, S.H.; Jensen, C.L.; Lough, M.F. Efficient Finite Difference Model for Flow in a Reservoir With Multiple Length-Scale Fractures. SPE J. 2000, 5, 268–275. [Google Scholar] [CrossRef]
- Lee, S.H.; Lough, M.F.; Jensen, C.L. Hierarchical modeling of flow in naturally fractured formations with multiple length scales. Water Resour. Res. 2001, 37, 443–455. [Google Scholar] [CrossRef]
- Li, L.; Lee, S.H. Efficient Field-Scale Simulation of Black Oil in a Naturally Fractured Reservoir Through Discrete Fracture Networks and Homogenized Media. SPE Reserv. Eval. Eng. 2008, 11, 750–758. [Google Scholar] [CrossRef]
- Moinfar, A.; Varavei, A.; Sepehrnoori, K.; Johns, R.T. Development of an Efficient Embedded Discrete Fracture Model for 3D Compositional Reservoir Simulation in Fractured Reservoirs. SPE J. 2013, 19, 289–303. [Google Scholar] [CrossRef] [Green Version]
- Zhang, K.; Wu, H.; Xu, Y.; Zhang, L.; Zhang, W.; Yao, J. Triangulated well pattern optimization constrained by geological and production factors. Zhongguo Shiyou Daxue Xuebao (Ziran Kexue Ban)/J. China Univ. Pet. (Ed. Nat. Sci.) 2015, 39, 111–118. [Google Scholar]
- Prusinkiewicz, P.; Lindenmayer, A. The Algorithmic Beauty of Plants; Springer: New York, NY, USA, 1990. [Google Scholar]
- Bayes, T. An essay towards solving a problem in the doctrine of chances. M.D. Comput. Comput. Med Pract. 1991, 8, 157–171. [Google Scholar] [CrossRef]
- Gavalas, G.R.; Shah, P.C.; Seinfeld, J.H. Reservoir History Matching by Bayesian Estimation. Soc. Pet. Eng. J. 1976, 16, 337–350. [Google Scholar] [CrossRef]
- Zhang, L.; Wang, S.; Zhang, K.; Zhang, X.; Sun, Z.; Zhang, H.; Chipecane, M.T.; Yao, J. Cooperative Artificial Bee Colony Algorithm with Multiple Populations for Interval Multiobjective Optimization Problems. IEEE Trans. Fuzzy Syst. 2019, 27, 1052–1065. [Google Scholar] [CrossRef]
- Xu, X.; Wang, C.; Zhou, P. GVRP considered oil-gas recovery in refined oil distribution: From an environmental perspective. Int. J. Prod. Econ. 2021, 235, 108078. [Google Scholar] [CrossRef]
- Xu, X.; Hao, J.; Zheng, Y. Multi-objective artificial bee colony algorithm for multi-stage resource leveling problem in sharing logistics network. Comput. Ind. Eng. 2020, 142, 106338. [Google Scholar] [CrossRef]
- Xu, X.; Hao, J.; Yu, L.; Deng, Y. Fuzzy Optimal Allocation Model for Task–Resource Assignment Problem in a Collaborative Logistics Network. IEEE Trans. Fuzzy Syst. 2019, 27, 1112–1125. [Google Scholar] [CrossRef]
- Cayir Ervural, B.; Evren, R.; Delen, D. A multi-objective decision-making approach for sustainable energy investment planning. Renew. Energy 2018, 126, 387–402. [Google Scholar] [CrossRef]































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reservoir Properties | Value |
|---|---|
| Reservoir size/m | 600 × 600 |
| Grid size/m | 10 × 10 |
| Production history/year | 5 |
| Reservoir initial pressure/MPa | 10 |
| Bottom hole pressure/MPa | 5 |
| Average permeability/mD | 0.05 |
| Initial oil saturation | 1 |
| Water bulk modulus/GPa | 2.18 |
| Oil bulk modulus/GPa | 1.52 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, L.; Xue, L.; Cui, C.; Qi, J.; Sun, J.; Zhou, X.; Dai, Q.; Zhang, K. Monitoring the Geometry Morphology of Complex Hydraulic Fracture Network by Using a Multiobjective Inversion Algorithm Based on Decomposition. Energies 2021, 14, 5216. https://doi.org/10.3390/en14165216
Zhang L, Xue L, Cui C, Qi J, Sun J, Zhou X, Dai Q, Zhang K. Monitoring the Geometry Morphology of Complex Hydraulic Fracture Network by Using a Multiobjective Inversion Algorithm Based on Decomposition. Energies. 2021; 14(16):5216. https://doi.org/10.3390/en14165216
Chicago/Turabian StyleZhang, Liming, Lili Xue, Chenyu Cui, Ji Qi, Jijia Sun, Xingyu Zhou, Qinyang Dai, and Kai Zhang. 2021. "Monitoring the Geometry Morphology of Complex Hydraulic Fracture Network by Using a Multiobjective Inversion Algorithm Based on Decomposition" Energies 14, no. 16: 5216. https://doi.org/10.3390/en14165216