
Bumpless Transfer of Uncertain Switched System and Its Application to Turbofan Engines

Abstract
:1. Introduction
2. Methods
2.1. Problem Formulation
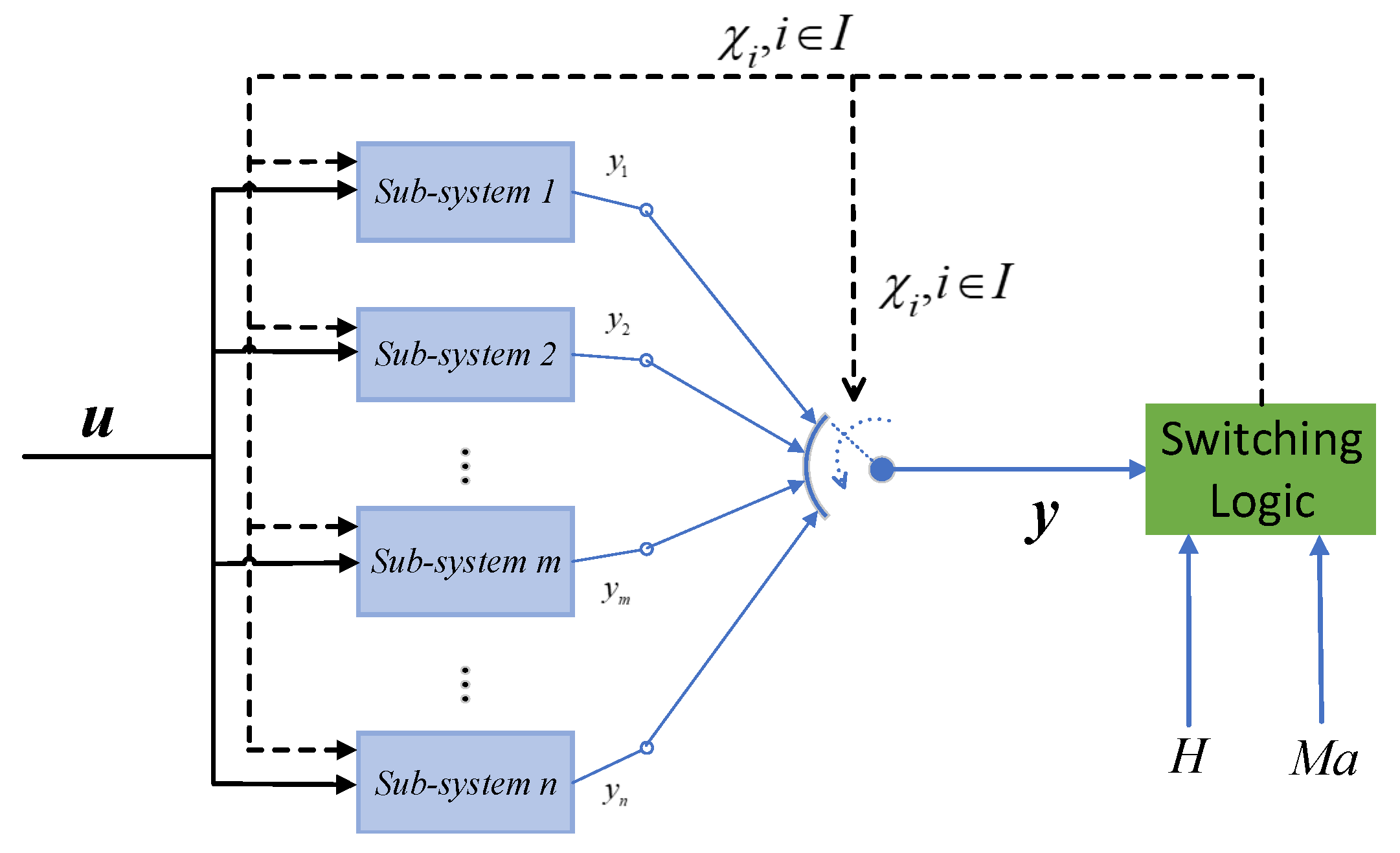
2.1.1. Uncertain Switched System
2.1.2. Error-Tracking Dynamic System
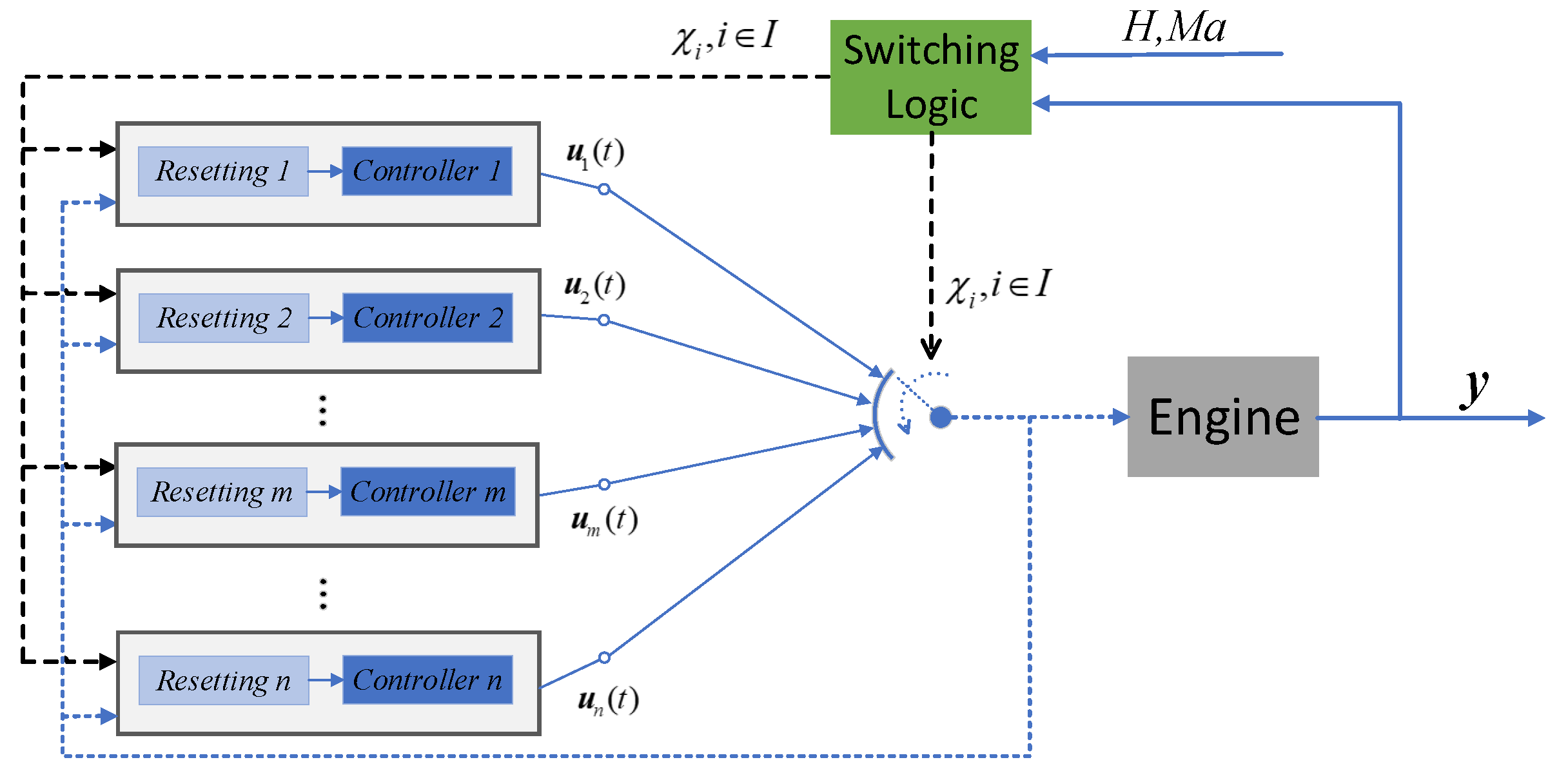
2.2. Controller Design
2.2.1. Integral Sliding Surface
2.2.2. ISMC Control Law for Uncertain Switched System
2.3. Bumpless Transfer Scheme
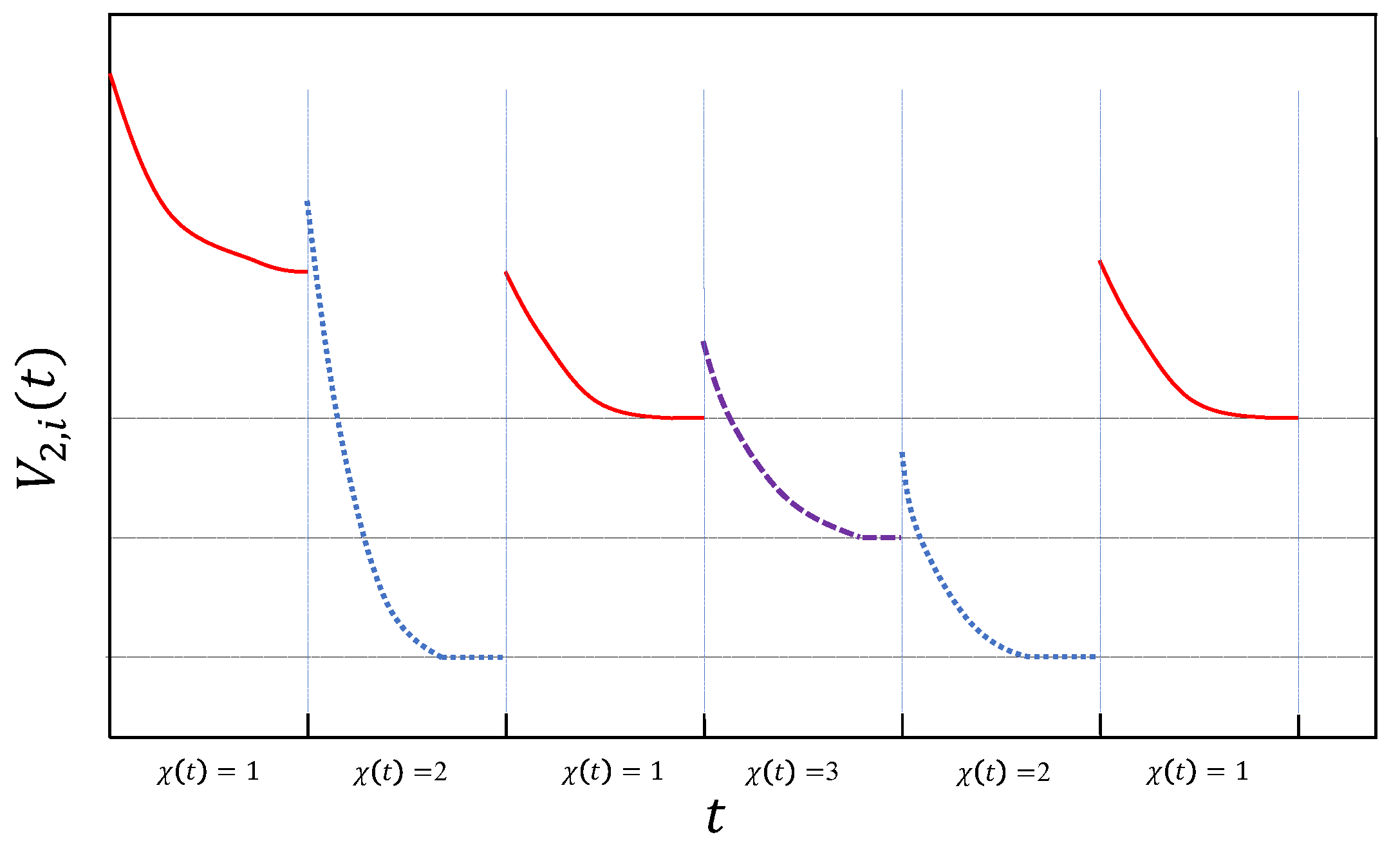
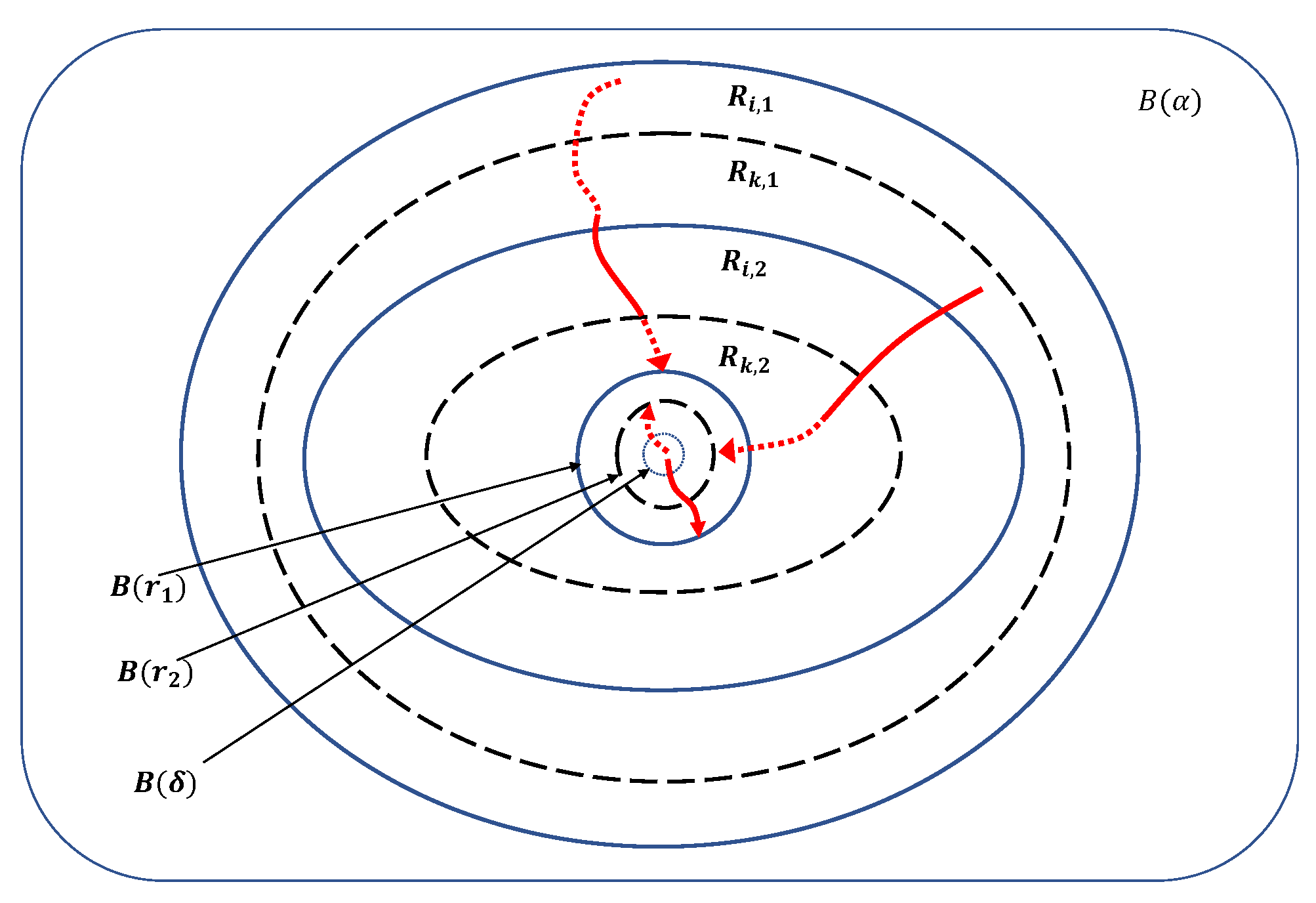
2.4. Global Stability of the Uncertain Switched System
3. Numerical Simulation
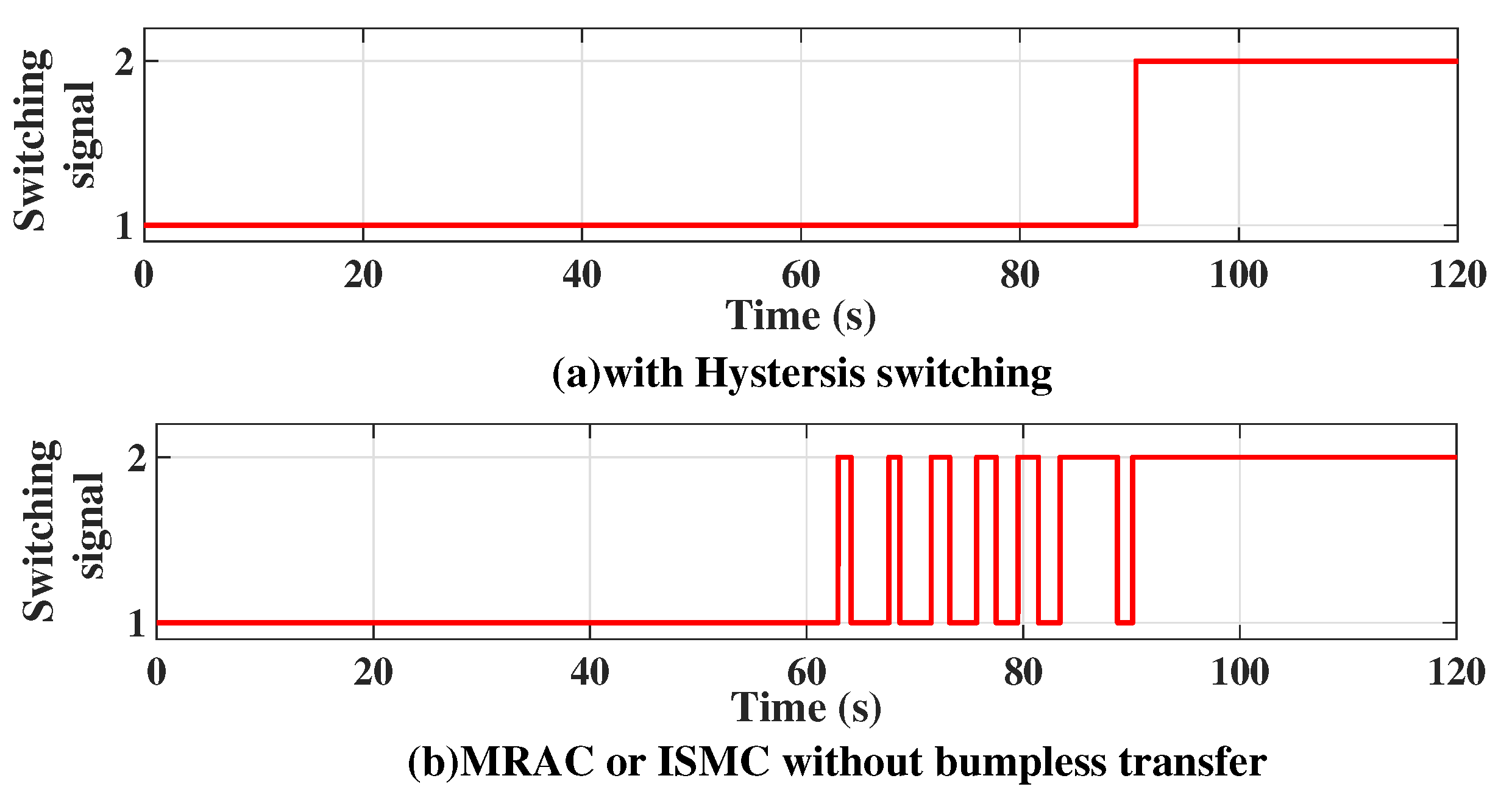
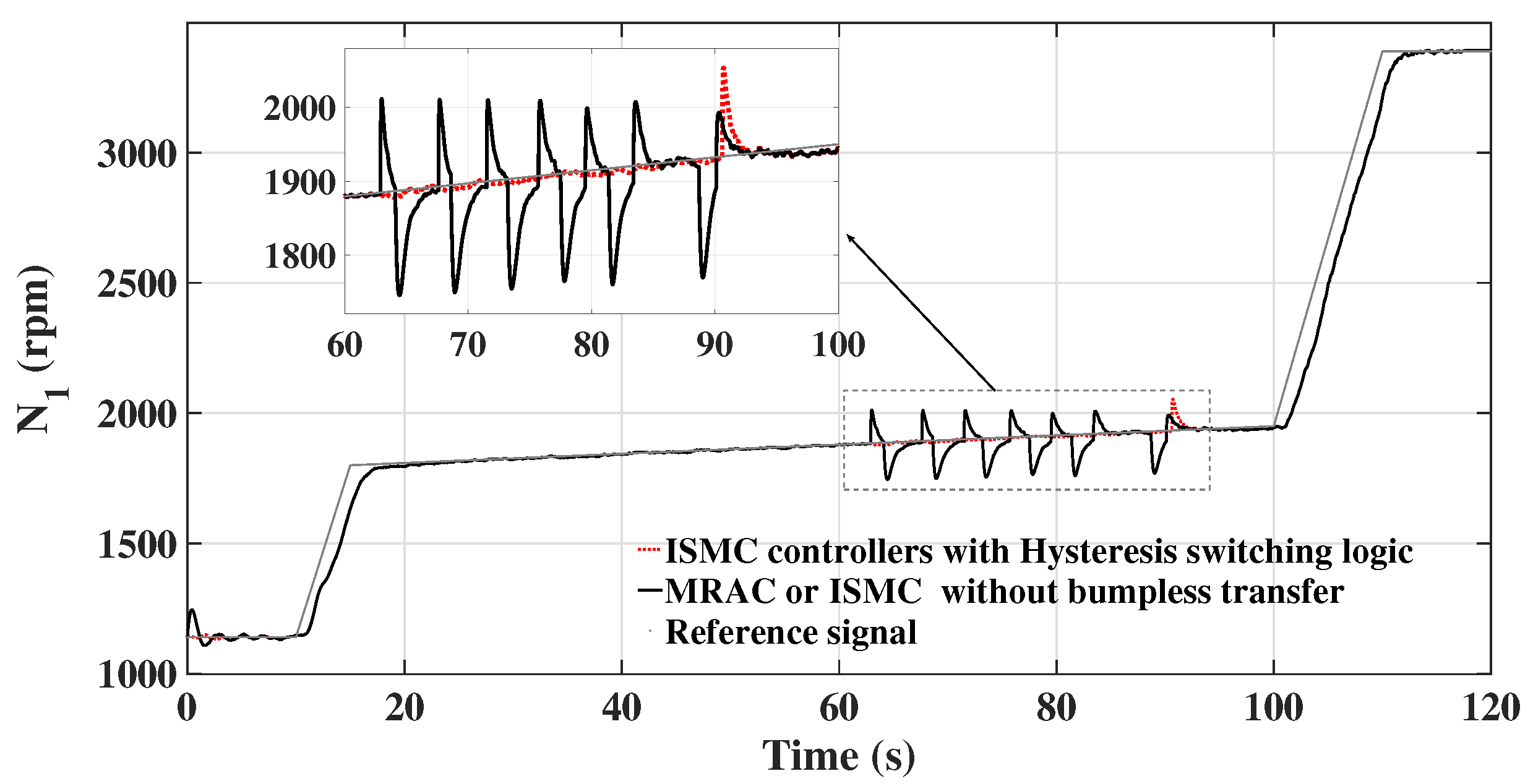
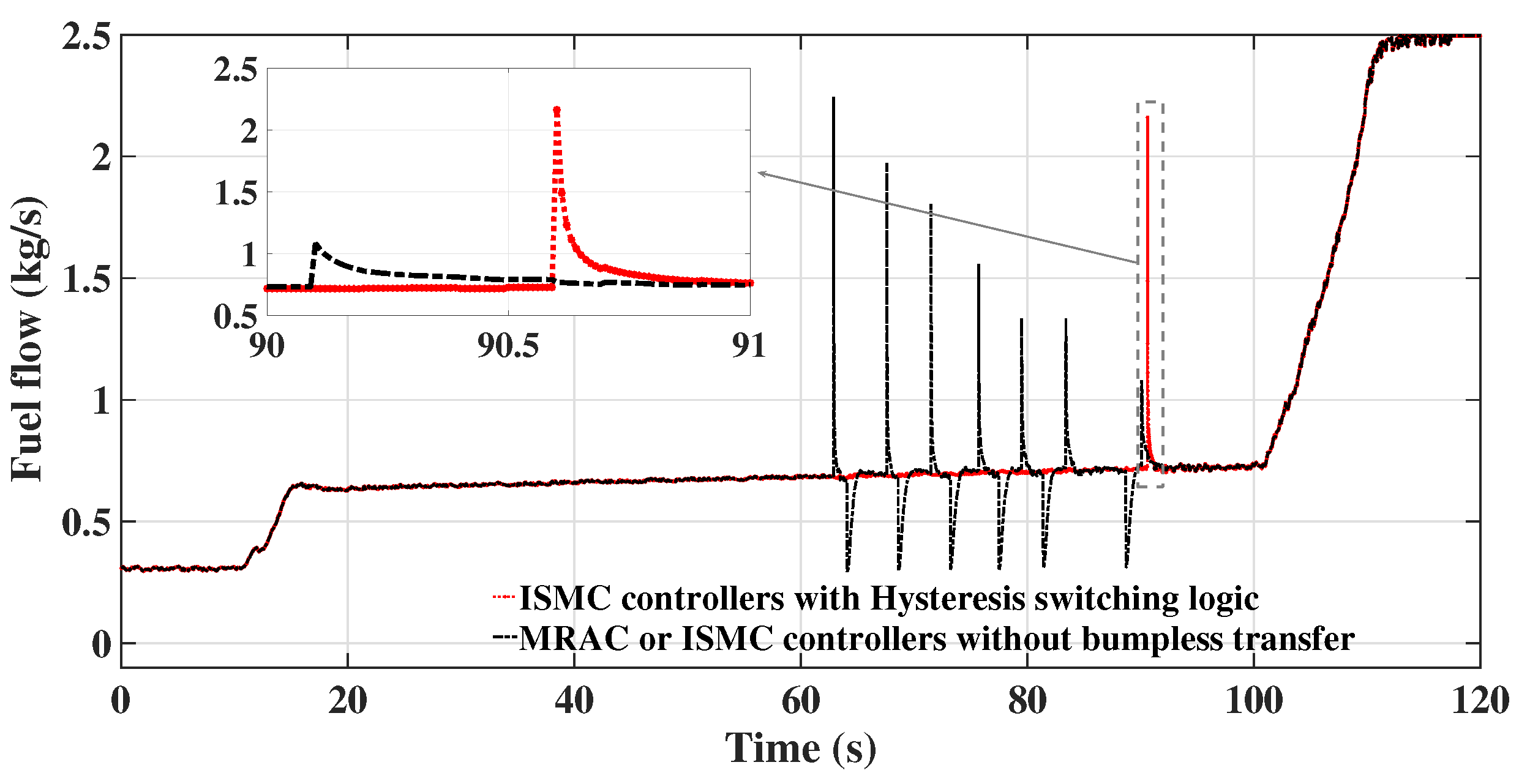
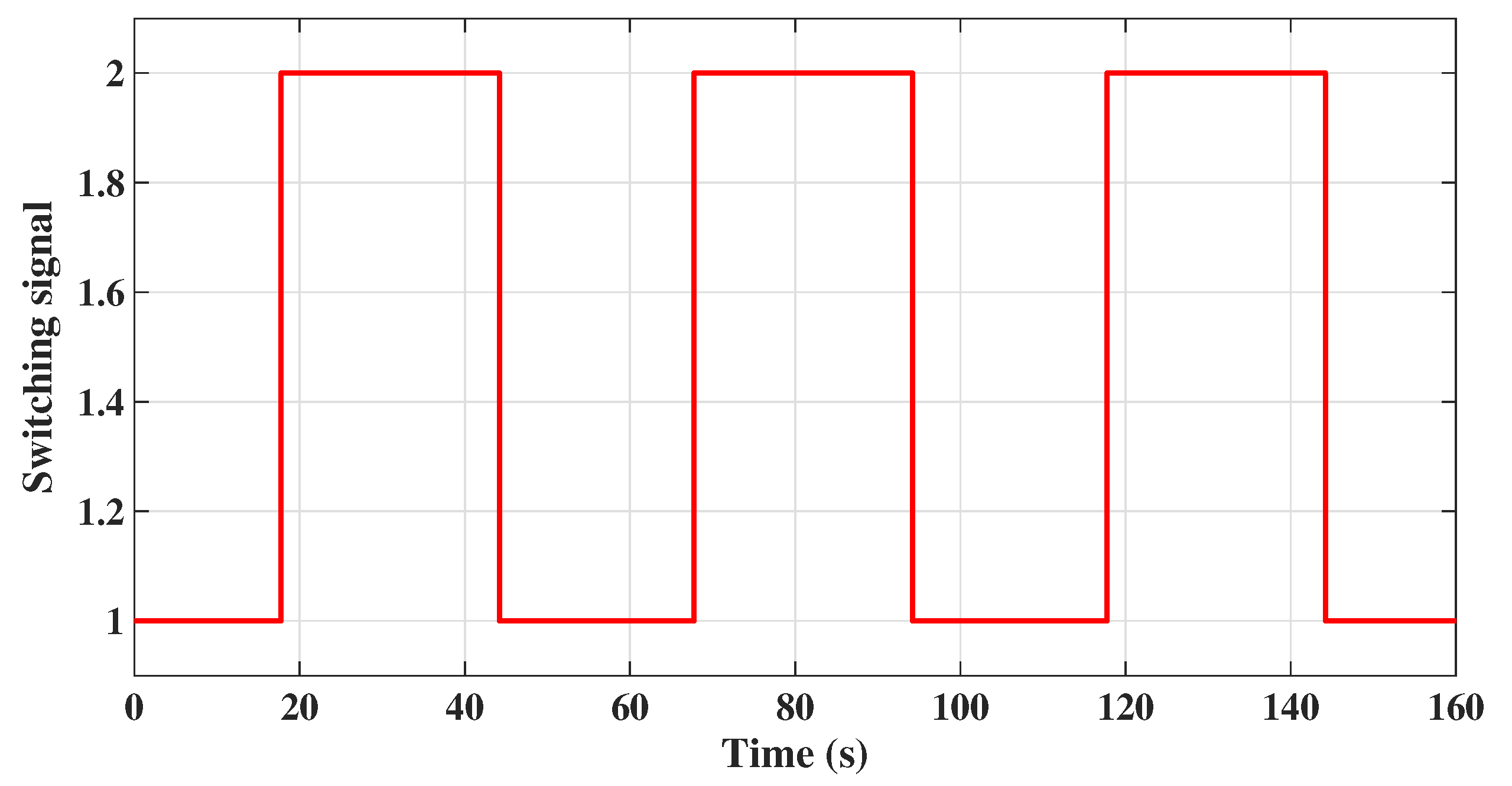
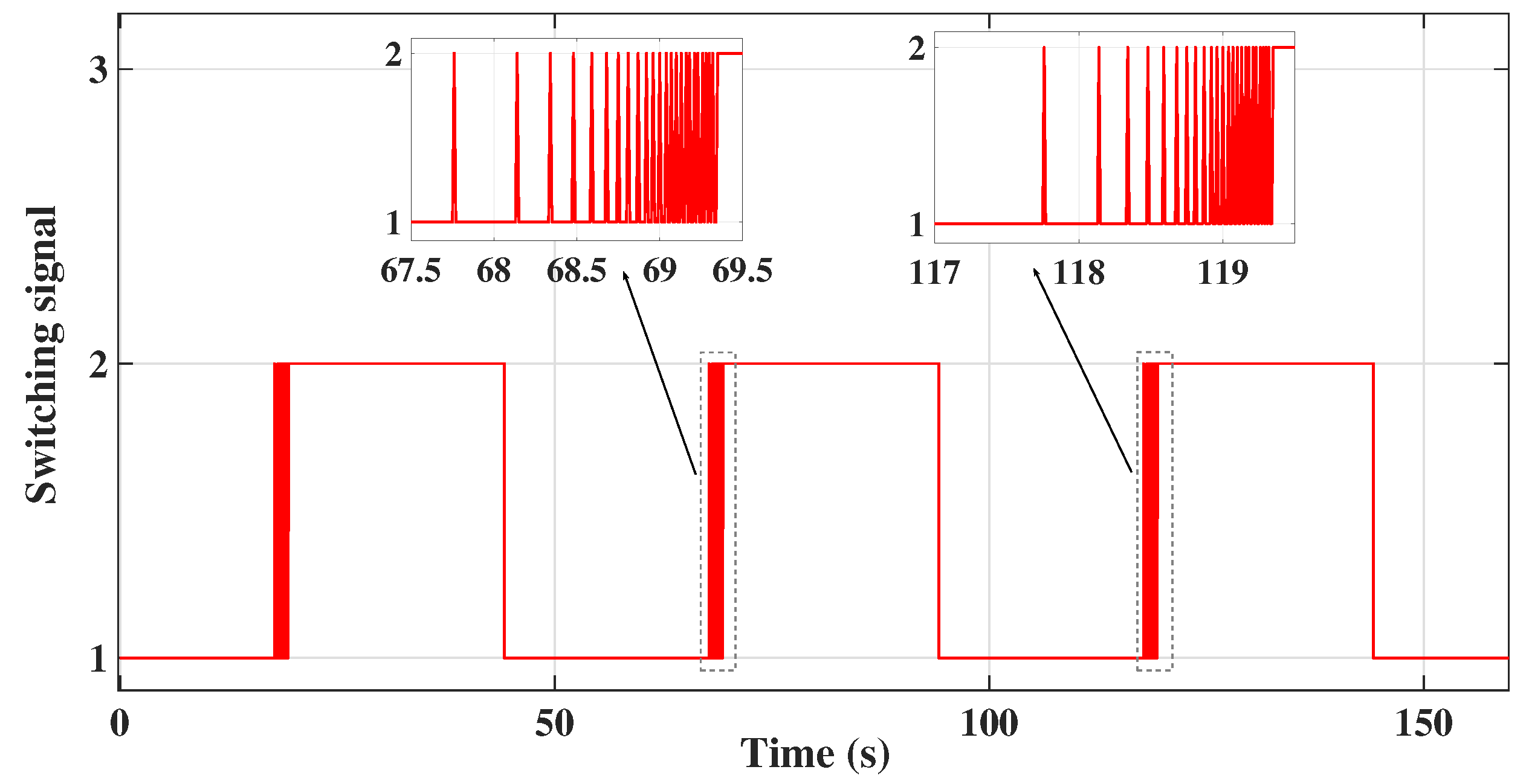
3.1. The Importance of Bumpless Transfer
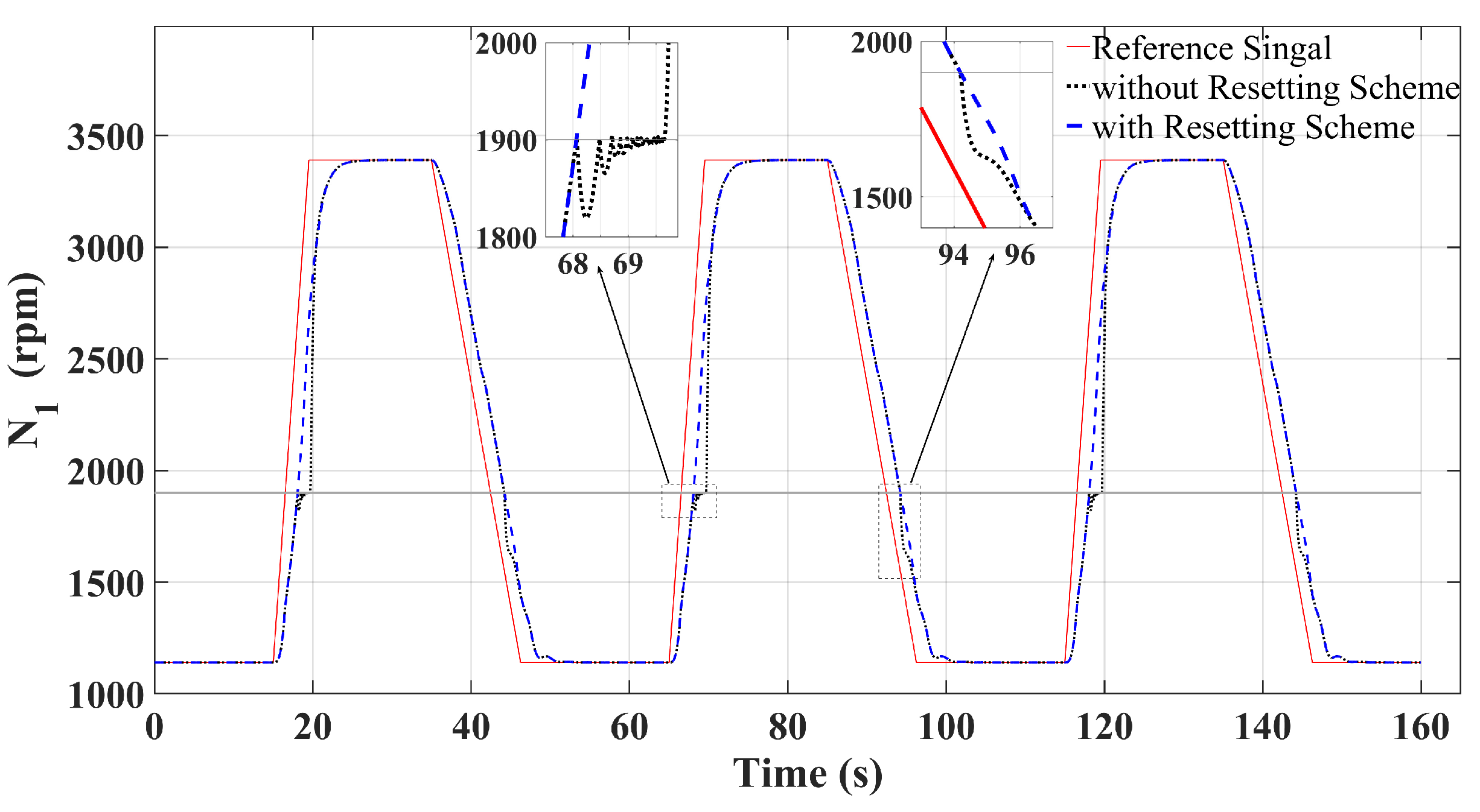
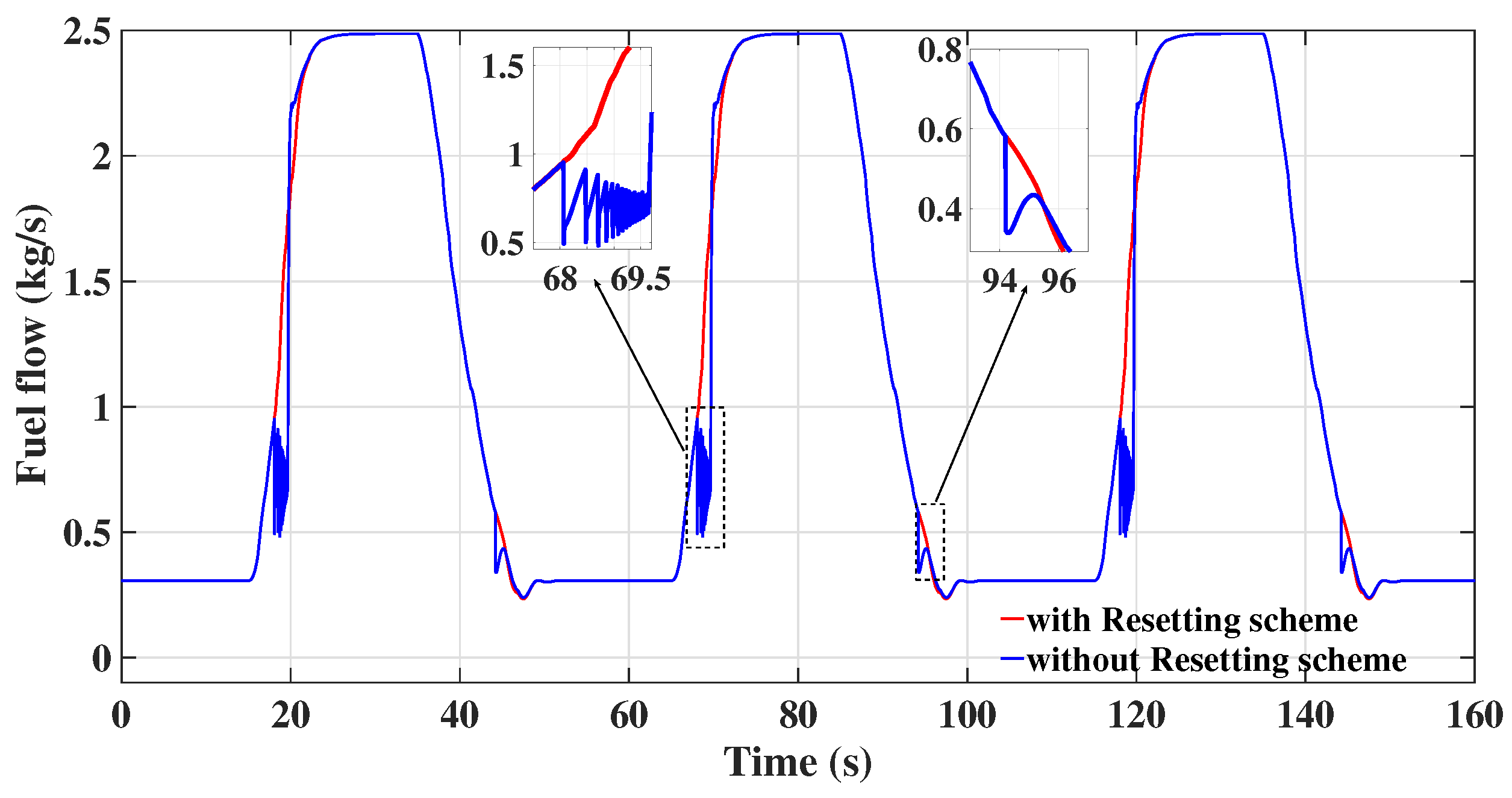
3.2. The Resetting Scheme Effectiveness
3.3. The Robustness and Effectiveness of the ISMC Control Scheme
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Jaw, L.C.; Mattingly, J. Aircraft Engine Controls: Design, System Analysis, and Health Monitoring; AIAA: Reston, VA, USA, 2009. [Google Scholar]
- Richter, H. Advanced Control of Turbofan Engines; Springer Science & Business Media: New York, NY, USA, 2011. [Google Scholar]
- Gu, N.; Wang, X.; Lin, F. Design of Disturbance Extended State Observer (D-ESO)-Based Constrained Full-State Model Predictive Controller for the Integrated Turbo-Shaft Engine/Rotor System. Energies 2019, 12, 4496. [Google Scholar] [CrossRef] [Green Version]
- Bei, Y.; Xi, W.; Penghui, S. Non-affine parameter dependent LPV model and LMI based adaptive control for turbofan engines. Chin. J. Aeronaut. 2019, 32, 585–594. [Google Scholar]
- Leith, D.J.; Leithead, W.E. Survey of gain-scheduling analysis and design. Int. J. Control 2000, 73, 1001–1025. [Google Scholar] [CrossRef]
- Balas, G.J. Linear, parameter-varying control and its application to a turbofan engine. Int. J. Robust Nonlinear Control-IFAC-Affil. J. 2002, 12, 763–796. [Google Scholar] [CrossRef]
- Wolodkin, G.; Balas, G.J.; Garrard, W.L. Application of parameter-dependent robust control synthesis to turbofan engines. J. Guid. Control Dyn. 1999, 22, 833–838. [Google Scholar] [CrossRef]
- Liberzon, D.; Morse, A.S. Basic problems in stability and design of switched systems. IEEE Control. Syst. Mag. 1999, 19, 59–70. [Google Scholar]
- Niu, B.; Zhao, J. Tracking control for output-constrained nonlinear switched systems with a barrier Lyapunov function. Int. J. Syst. Sci. 2013, 44, 978–985. [Google Scholar] [CrossRef]
- Yang, D.; Zong, G.; Karimi, H.R. H∞ Refined Antidisturbance Control of Switched LPV Systems With Application to Aero-Engine. IEEE Trans. Ind. Electron. 2019, 67, 3180–3190. [Google Scholar] [CrossRef]
- Liu, M.; Zhang, L.; Shi, P.; Zhao, Y. Sliding mode control of continuous-time Markovian jump systems with digital data transmission. Automatica 2017, 80, 200–209. [Google Scholar] [CrossRef]
- Turso, J.; Litt, J. Intelligent, Robust Control of Deteriorated Turbofan Engines via Linear Parameter Varing Quadratic Lyapunov Function Design. In Proceedings of the AIAA 1st Intelligent Systems Technical Conference, Chicago, IL, USA, 20–22 September 2004; p. 6363. [Google Scholar]
- Lu, J.; Brown, L.J. A multiple Lyapunov functions approach for stability of switched systems. In 2010 American Control Conference; IEEE: Piscataway, NJ, USA, 2010; pp. 3253–3256. [Google Scholar]
- Hespanha, J.P.; Morse, A.S. Stability of switched systems with average dwell-time. In Proceedings of the 38th IEEE Conference on Decision and Control (Cat. No. 99CH36304), Phoenix, AZ, USA, 7–10 December 1999; IEEE: Piscataway, NJ, USA, 1999; Volume 3, pp. 2655–2660. [Google Scholar]
- Li, Z.; Soh, C.B.; Xu, X. Lyapunov stability of a class of hybrid dynamic systems. Automatica 2000, 36, 297–302. [Google Scholar] [CrossRef]
- Branicky, M.S. Multiple Lyapunov functions and other analysis tools for switched and hybrid systems. IEEE Trans. Autom. Control 1998, 43, 475–482. [Google Scholar] [CrossRef] [Green Version]
- Wu, C.; Zhao, J.; Sun, X.M. Adaptive tracking control for uncertain switched systems under asynchronous switching. Int. J. Robust Nonlinear Control 2015, 25, 3457–3477. [Google Scholar] [CrossRef]
- Lian, J.; Zhao, J.; Dimirovski, G.M. Integral sliding mode control for a class of uncertain switched nonlinear systems. Eur. J. Control 2010, 16, 16–22. [Google Scholar] [CrossRef]
- Zhao, H.; Niu, Y. Finite-time sliding mode control of switched systems with one-sided Lipschitz nonlinearity. J. Frankl. Inst. 2020, 357, 11171–11188. [Google Scholar] [CrossRef]
- Utkin, V.; Shi, J. Integral sliding mode in systems operating under uncertainty conditions. In Proceedings of the 35th IEEE Conference on Decision and Control, Kobe, Japan, 13 December 1996; IEEE: Piscataway, NJ, USA, 1996; Volume 4, pp. 4591–4596. [Google Scholar]
- Malloci, I.; Hetel, L.; Daafouz, J.; Iung, C.; Szczepanski, P. Bumpless transfer for switched linear systems. Automatica 2012, 48, 1440–1446. [Google Scholar] [CrossRef]
- Yang, D.; Zhao, J. H∞ bumpless transfer for switched LPV systems and its application. Int. J. Control 2019, 92, 1945–1958. [Google Scholar] [CrossRef]
- Zaccarian, L.; Teel, A.R. The L2 (l2) bumpless transfer problem for linear plants: Its definition and solution. Automatica 2005, 41, 1273–1280. [Google Scholar] [CrossRef]
- Bin, W.; Jingquan, H. Intermediate State Control of Turbofan Engine in Full Envelope Based on Switched Polytopic Approach. J. Aerosp. Power 2016, 31, 2040–2048. [Google Scholar]
- Kersting, S.; Buss, M. Direct and indirect model reference adaptive control for multivariable piecewise affine systems. IEEE Trans. Autom. Control 2017, 62, 5634–5649. [Google Scholar] [CrossRef]
- Chapman, J.W.; Lavelle, T.M.; May, R.D.; Litt, J.S.; Guo, T.H. Toolbox for the Modeling and Analysis of Thermodynamic Systems (T-MATS) User’s Guide; NASA, Glenn Research Center: Cleveland, OH, USA, 2014. [Google Scholar]
- Sang, Q. Model Reference Adaptive Control of Piecewise Linear Systems with Applications to Aircraft Flight Control. Ph.D. Thesis, University of Virginia, Charlottesville, VA, USA, 2012. [Google Scholar]
- Du, X.; Richter, H.; Guo, Y. Multivariable sliding-mode strategy with output constraints for aeroengine propulsion control. J. Guid. Control Dyn. 2016, 39, 1631–1642. [Google Scholar] [CrossRef]
- Visser, W.P.; Broomhead, M.J. GSP A Generic Object-Oriented Gas Turbine Simulation Environment; Technical report; National Aerospace Laboratory NLR: Amsterdam, The Netherlands, 2000. [Google Scholar]
- Lofberg, J. YALMIP: A toolbox for modeling and optimization in MATLAB. In Proceedings of the 2004 IEEE International Conference on Robotics and Automation (IEEE Cat. No. 04CH37508), Taipei, Taiwan, 2–4 September 2004; IEEE: Piscataway, NJ, USA, 2004; pp. 284–289. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | H (m) | (rpm) | |
|---|---|---|---|
| 1 | 0 | 0 | 1800 |
| 2 | 0 | 0 | 3200 |
| 3 | 0.31 | 1000 | 1700 |
| 4 | 0.31 | 1000 | 3200 |
| 5 | 0.6 | 4000 | 3200 |
| 6 | 0.78 | 8000 | 3200 |
| 7 | 0.78 | 10,000 | 3200 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, P.; Wang, X.; Yang, S.; Yang, B.; Chen, H.; Wang, B. Bumpless Transfer of Uncertain Switched System and Its Application to Turbofan Engines. Energies 2021, 14, 5204. https://doi.org/10.3390/en14165204
Sun P, Wang X, Yang S, Yang B, Chen H, Wang B. Bumpless Transfer of Uncertain Switched System and Its Application to Turbofan Engines. Energies. 2021; 14(16):5204. https://doi.org/10.3390/en14165204
Chicago/Turabian StyleSun, Penghui, Xi Wang, Shubo Yang, Bei Yang, Huairong Chen, and Bin Wang. 2021. "Bumpless Transfer of Uncertain Switched System and Its Application to Turbofan Engines" Energies 14, no. 16: 5204. https://doi.org/10.3390/en14165204