
The Application of Disturbance-Observer-Based Control in Breath Pressure Control of Aviation Electronic Oxygen Regulator


Abstract
:1. Introduction
2. System Principle and Mathematical Model
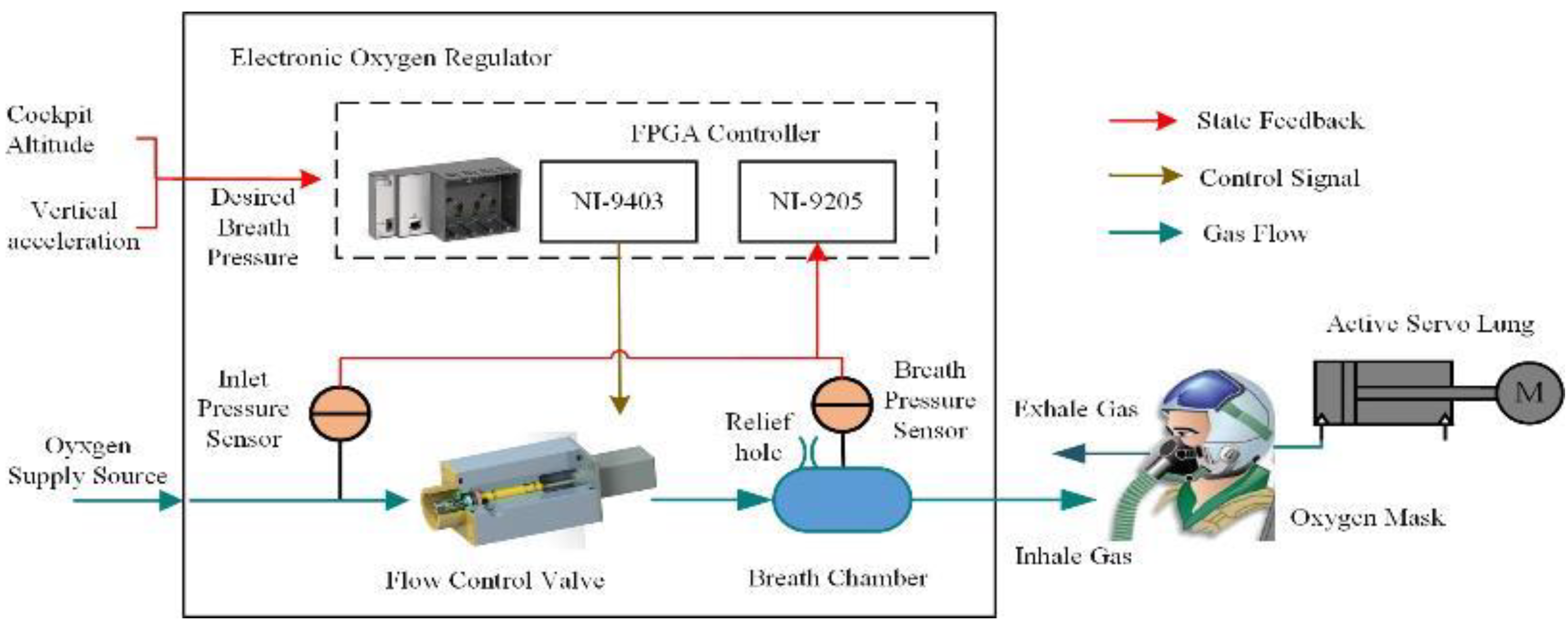
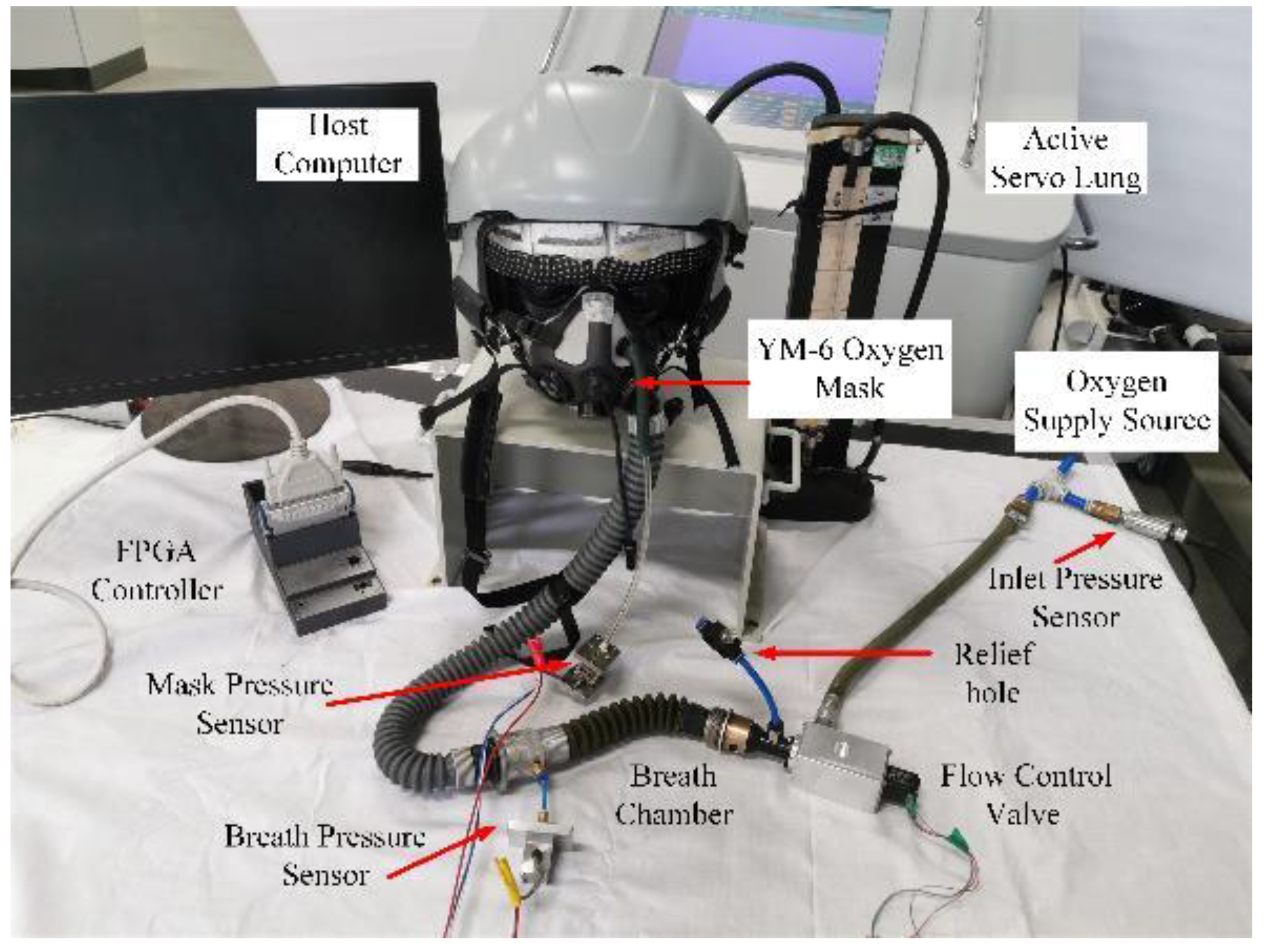
2.1. System Description
2.2. Mathematical Model
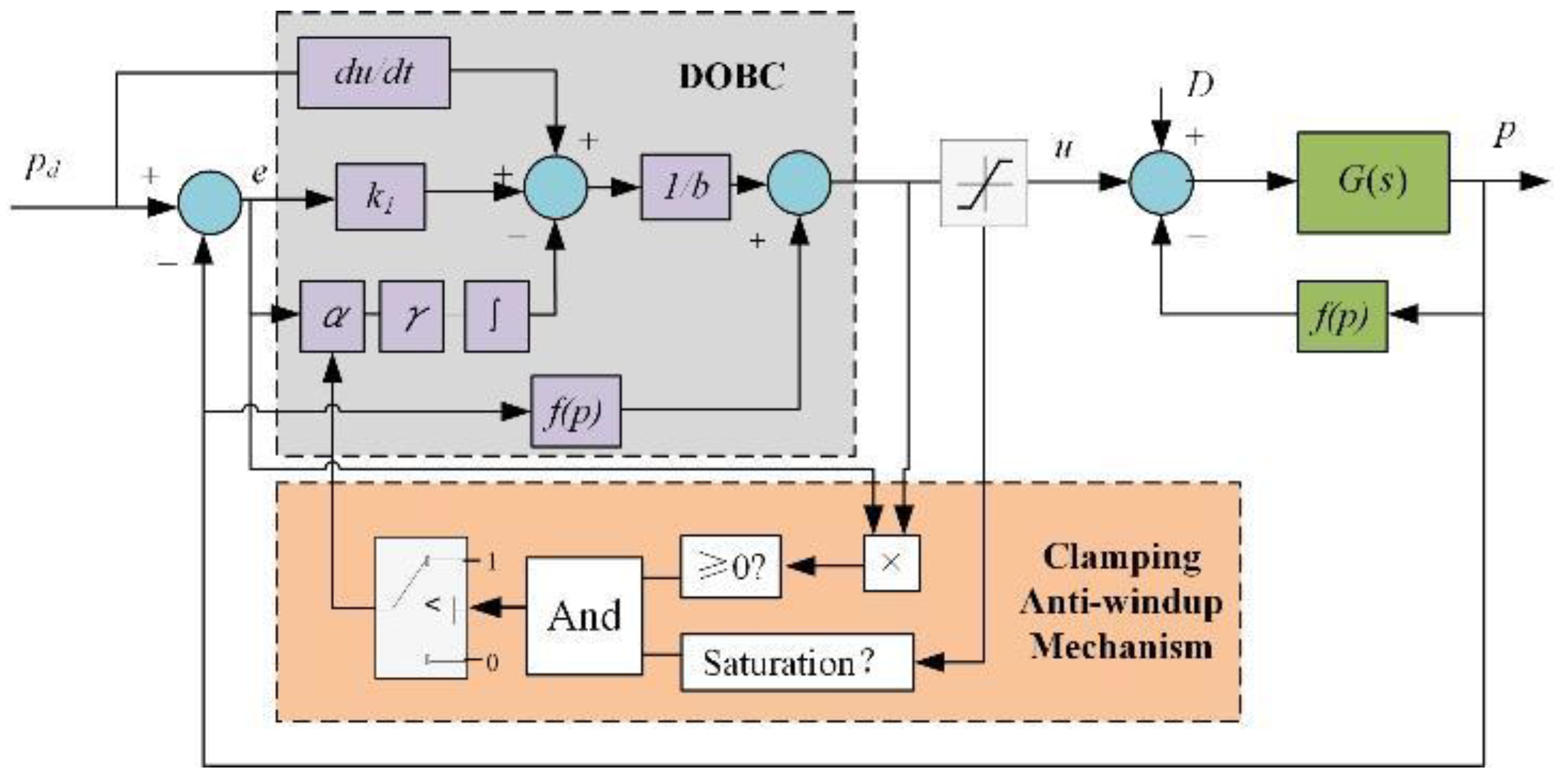
3. DOBC Design
3.1. Design of Feedback Control
3.2. Design of Disturbance Observer
3.3. Design of Anti-Windup Mechanism
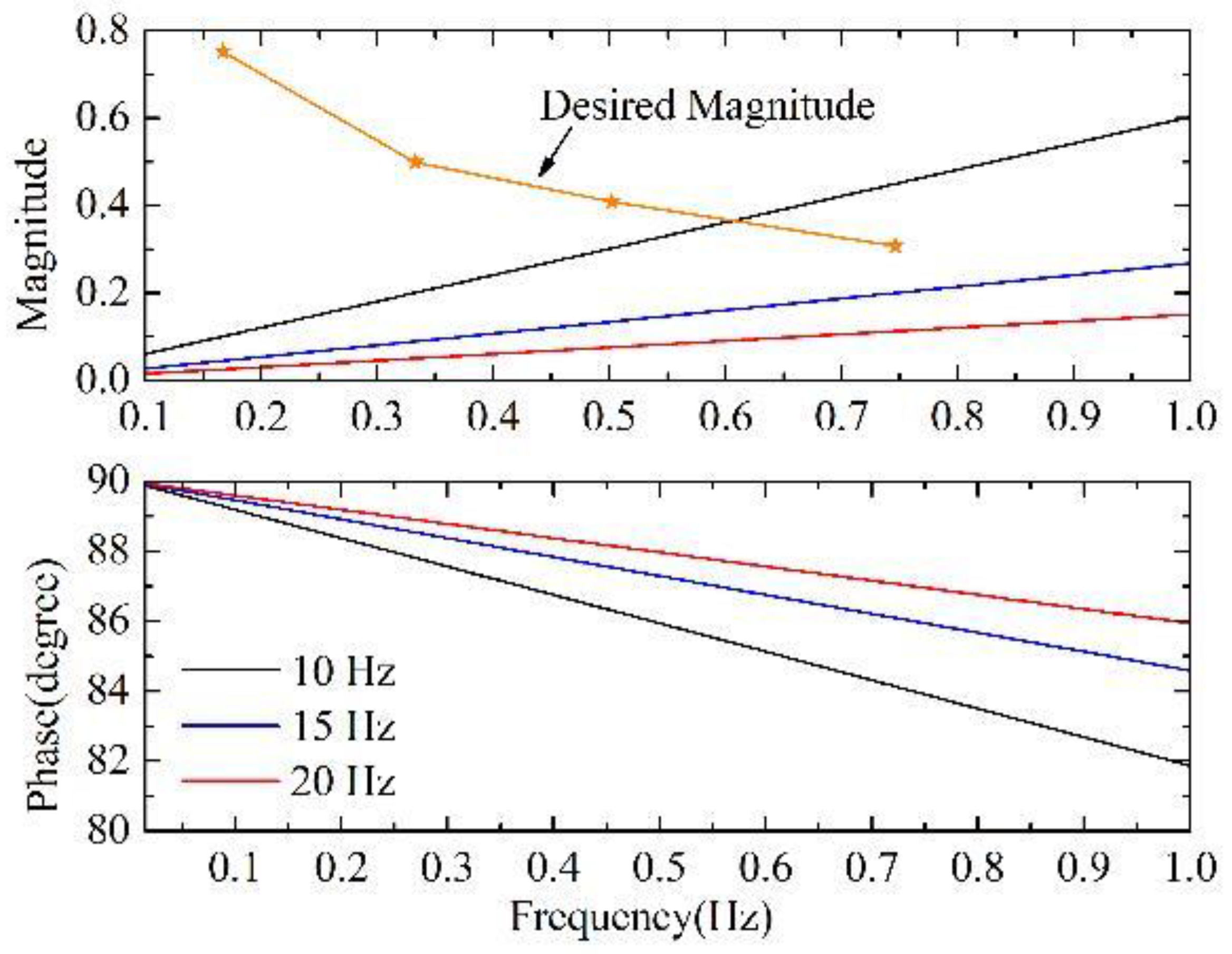
3.4. Design of Control Parameters
4. Results and Discussion
4.1. Simulation Research
- Simulation of normal breath
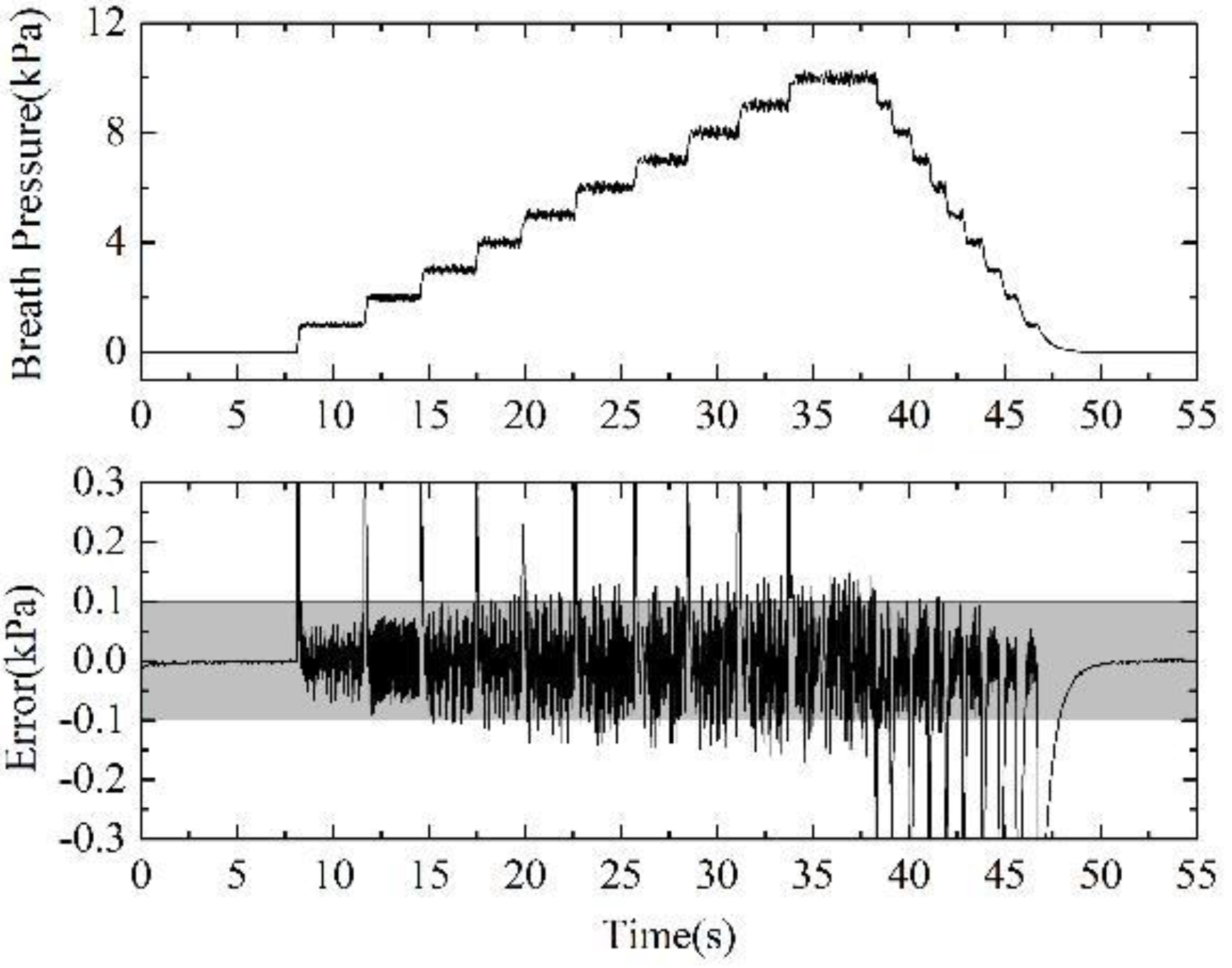
- Simulation of positive pressurization
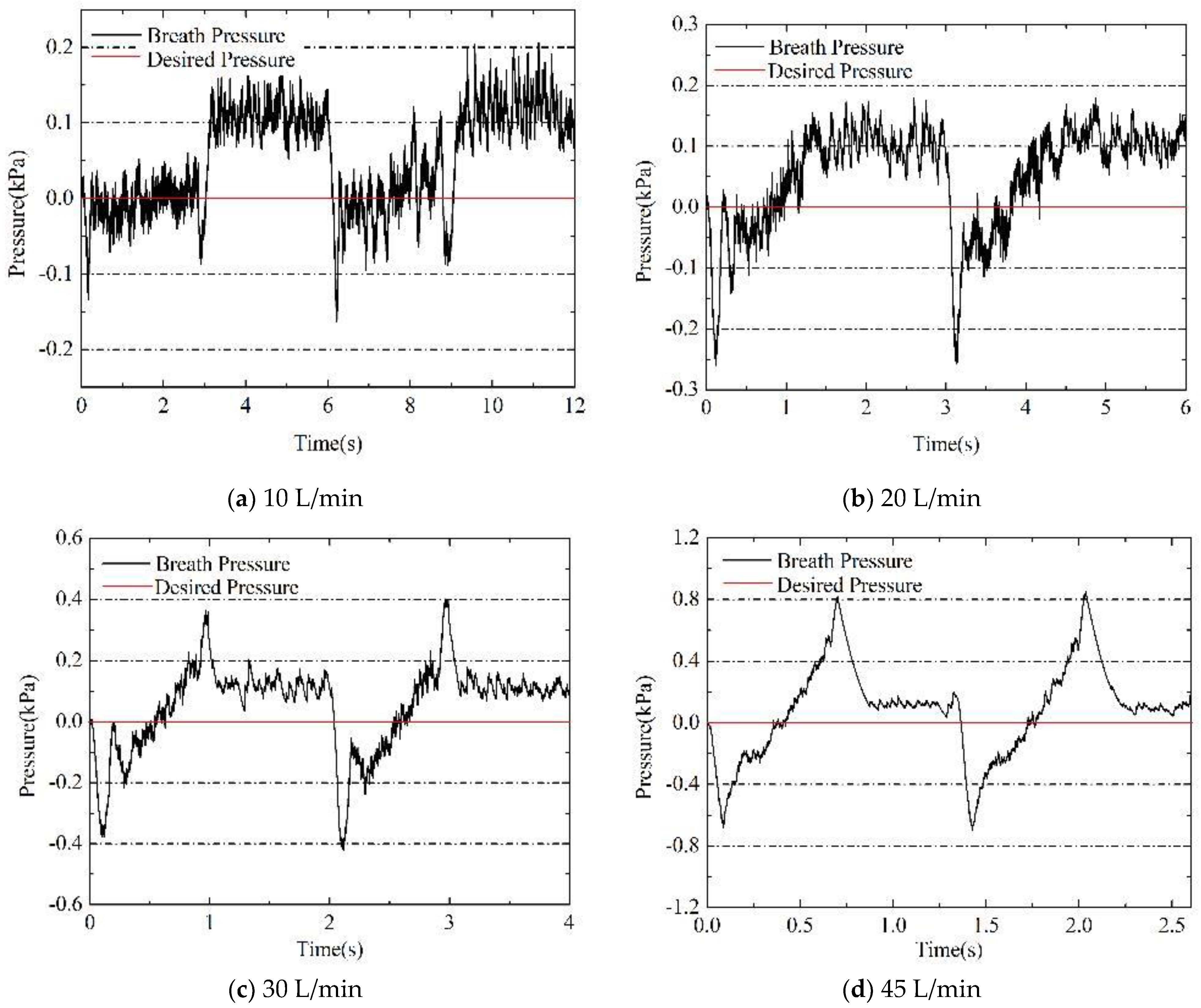
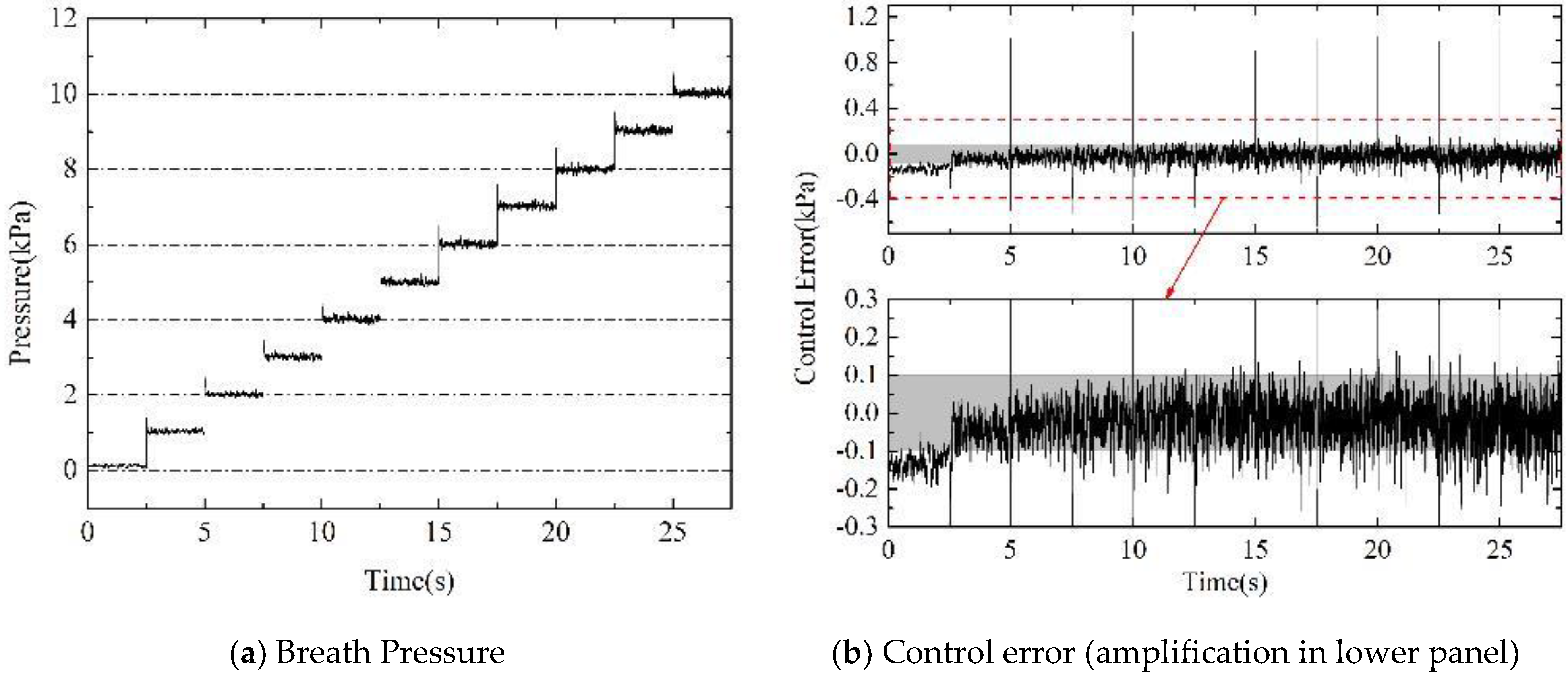
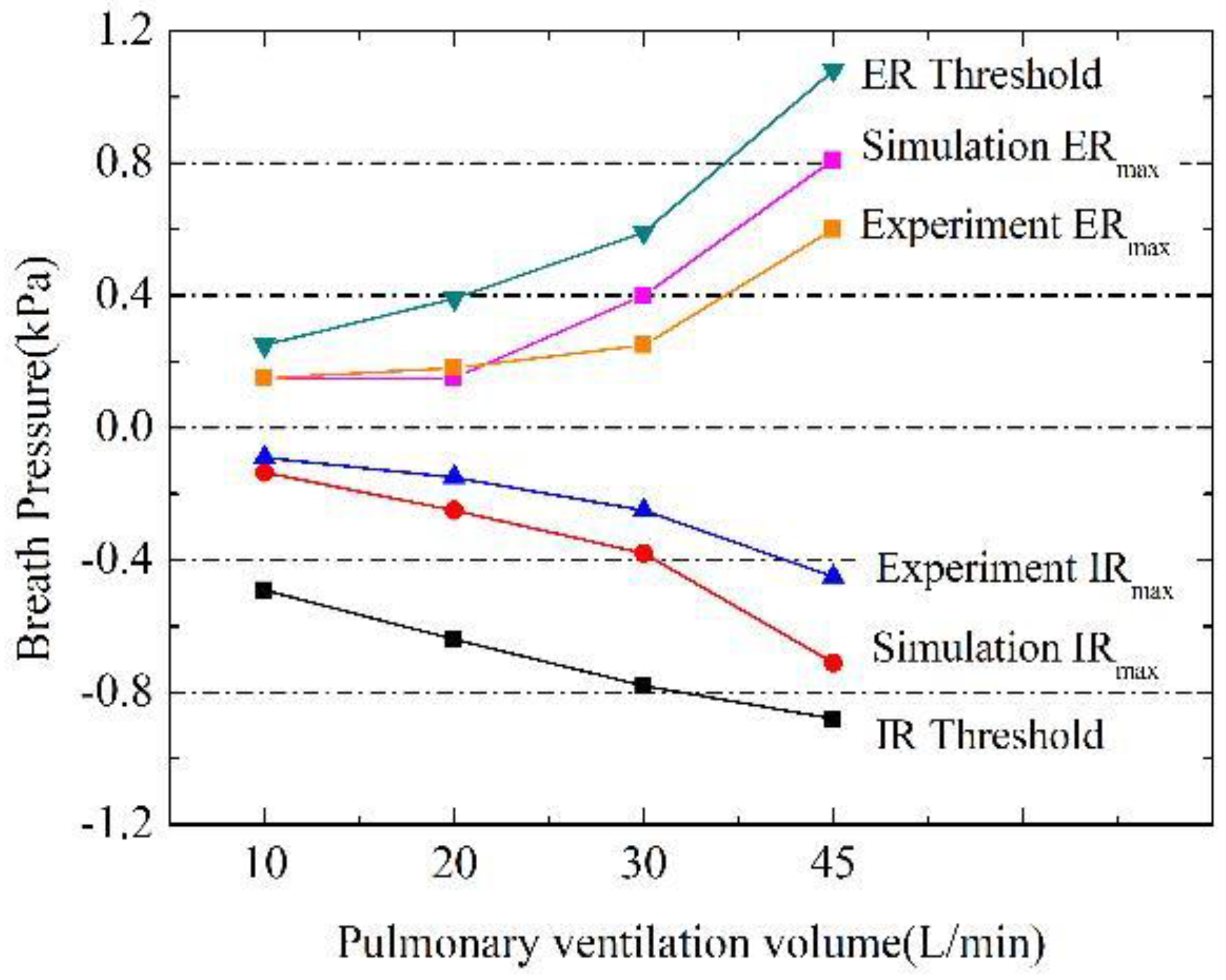
4.2. Experimental Research
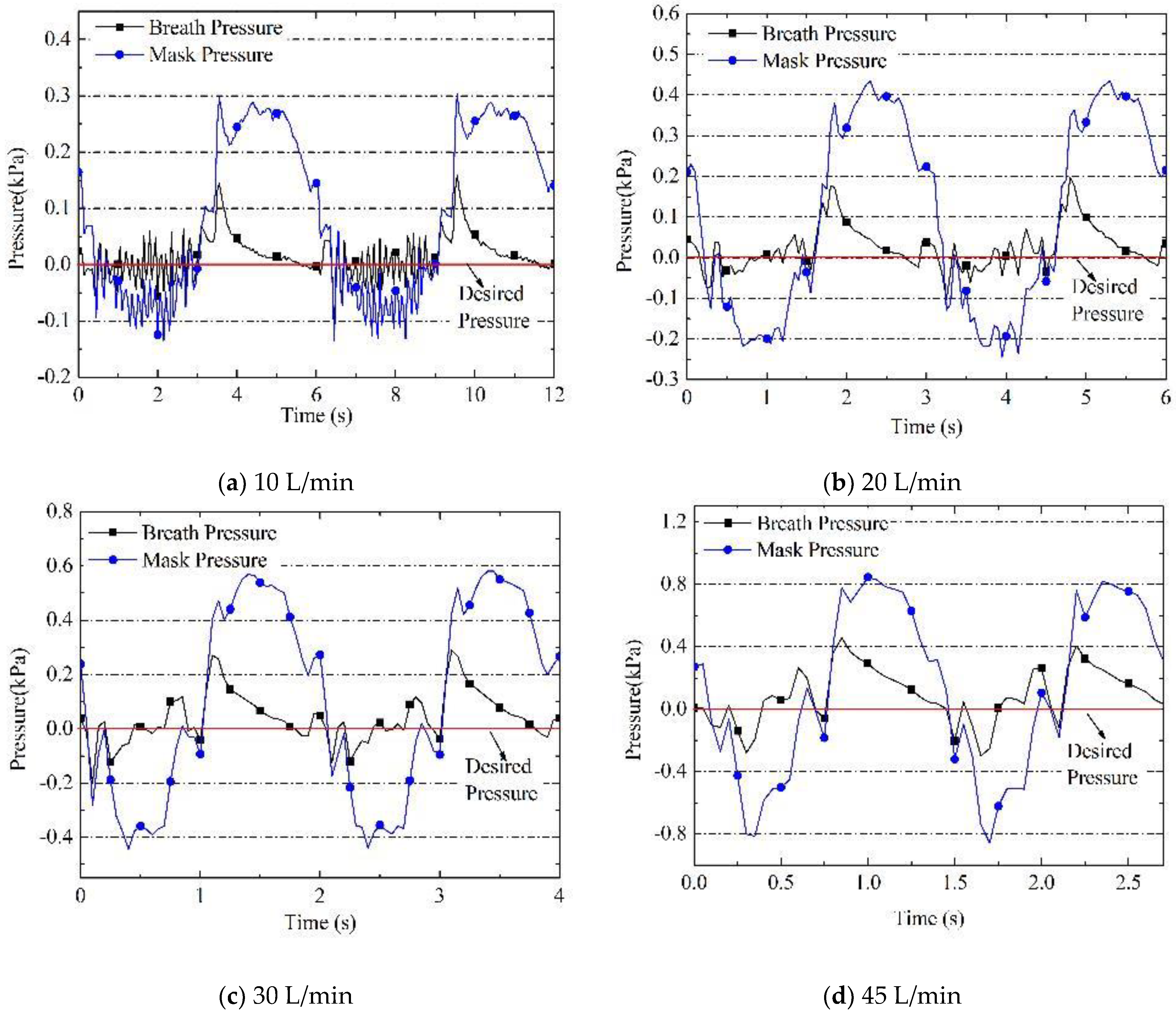
- Experiment of normal breath
- Experiment of positive pressurization
5. Conclusions and Perspectives
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Xiao, H.J. Application Physiology of Aircraft Oxygen Protective Equipment; Military Medical Science Press: Beijing, China, 2005; pp. 34–46. (In Chinese) [Google Scholar]
- Rainford, D.J.; Gradwell, D.P. Ernsting’s Aviation Medicine, 4th ed.; Oxford University Press: London, UK, 2006; pp. 105–127. [Google Scholar]
- Yan, S.H.; Yixuan, W.A.; Maolin, C.A.; Zhang, B.; Jian, Z.H. An aviation oxygen supply system based on a mechanical ventilation model. Chin. J. Aeronaut. 2018, 31, 197–204. [Google Scholar] [CrossRef]
- Ackles, K.N.; Porlier JA, G.; Holness, D.E. Protection against the physiological effects of positive pressure breathing. Aviat. Space Environ. Med. 1978, 49, 753–758. [Google Scholar] [PubMed]
- Lauritzsen, L.P.; Pfitzner, J. Pressure breathing in fighter aircraft for G accelerations and loss of cabin pressurization at altitude—A brief review. J. Can. Danesthésie 2003, 50, 415. [Google Scholar] [CrossRef] [Green Version]
- Pan, R.; Lin, G.P.; Zeng, Y.; Yang, X.; Shi, Z.G. Modeling and Simulation of Diaphragm Oxygen Regulator Pressure Control system. In Proceedings of the 2019 IEEE 10th International Conference on Mechanical and Aerospace Engineering (ICMAE), Brussels, Belgium, 22–25 July 2019; pp. 6–10. [Google Scholar] [CrossRef]
- Beaumont, M.; Lejeune, D.; Isabey, D.; Marotte, H.; Harf, A.; Lofaso, F. Positive pressure generation by pneumatic and electronic O2 regulators: A bench experimental evaluation. Aviat. Space Environ. Med. 1999, 70, 812–818. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Xiao, H.J. Molecular sieve oxygen systems on French military aircraft. Aeronaut. Astronaut. 1996, 1, 38–42. (In Chinese) [Google Scholar]
- Siska, W.D., Jr.; Collins, R.; Carleton Technologies Inc. Electromechanical Oxygen Valve and Regulator. United States Patent US 7677529 B2, 10 March 2010. [Google Scholar]
- Frampton, R.; B/E Intellectual Property. Electromechanical Regulator with Primary and Backup Modes of Operation for Regulating Passenger Oxygen. United States Patent US 7604019 B2, 20 October 2010. [Google Scholar]
- Yu, Z.; Zhao, J. Simulation of pressurized oxygen supply performance of air oxygen supply system based on Simulink. Microcomput. Appl. 2010, 31, 1–6. (In Chinese) [Google Scholar]
- Yu, Z.; Bing, S.; Weidong, W.; Guiping, L. Simulation and optimization of a new pulmonary mechanism in electronic oxygen regulator. In Proceedings of the 2016 IEEE International Conference on Aircraft Utility Systems (AUS), Beijing, China, 10–12 October 2016; pp. 719–722. [Google Scholar] [CrossRef]
- Yu, X.; Sun, B.; Lin, G.; Wang, H. Application of ATmega128 microcontroller in electronic oxygen regulator. Micro-Comput. Appl. 2009, 12, 50–56. (In Chinese) [Google Scholar]
- Sun, C.; Cai, Y.; Long, H. Research on stepping motor fuzzy control technology application in the aircraft electronic oxygen regulator. Meas. Control Technol. 2013, 4, 82–87. (In Chinese) [Google Scholar]
- Li, X.; Lin, G.; Zeng, Y.; Wu, F. Design of electronic oxygen regulator PID control system based on LabVIEW. Comput. Meas. Control. 2016, 3, 80–83. (In Chinese) [Google Scholar]
- Yuxin, J.; Qinglin, S.; Zengqiang, C.; Sanpeng, D. Modeling and simulation of an electronic oxygen regulator based on generalized predictive control algorithm. In Proceedings of the 34th China Control Conference (CCC), Hangzhou, China, 28–30 July 2015; pp. 4067–4072. [Google Scholar] [CrossRef]
- Jiang, Y.; Sun, Q.; Zhang, X.; Chen, Z. Pressure Regulation for Oxygen Mask Based on Active Disturbance Rejection Control. IEEE Trans. Ind. Electron. 2017, 6402–6411. [Google Scholar] [CrossRef]
- Jiang, Y.; Sun, Q.; Tan, P.; Chen, Z. Modeling and Simulation of an Electronic Oxygen Regulator Based on All-Coefficient Adaptive Control. ASME J. Dyn. Sys. Meas. Control 2016, 138, 081010. [Google Scholar] [CrossRef]
- Amare, N.D.; Kim, D.H.; Yang, S.J.; Son, Y.I. Boundary Conditions for Transient and Robust Performance of a Reduced-Order Model-Based State Feedback Controller with PI Observer. Energies 2021, 14, 2881. [Google Scholar] [CrossRef]
- Gao, N.; Lin, X.; Wu, W.; Blaabjerg, F. Grid Current Feedback Active Damping Control Based on Disturbance Observer for Battery Energy Storage Power Conversion System with LCL Filter. Energies 2021, 14, 1482. [Google Scholar] [CrossRef]
- Baran, J.; Jąderko, A. An MPPT Control of a PMSG-Based WECS with Disturbance Compensation and Wind Speed Estimation. Energies 2020, 13, 6344. [Google Scholar] [CrossRef]
- Rui, P.A.; Guiping, L.I.; Zhigao, S.H.; Yu, Z.E.; Xue, Y.A. Analysis and control optimization of positive pressure fluctuation in electromechanical oxygen regulator. Chin. J. Aeronaut. 2021, 34, 205–213. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Pulmonary Ventilation Volume (L/min) | Inspiratory Resistance (kPa) | Expiratory Resistance (kPa) |
|---|---|---|
| 10 | ≤0.49 | ≤0.25 |
| 20 | ≤0.64 | ≤0.39 |
| 30 | ≤0.78 | ≤0.59 |
| 45 | ≤0.88 | ≤1.08 |
| Pulmonary Ventilation Volume (L/min) | Input Disturbance Frequency (Hz) | Maximum of Inspiratory Flow (g/s) | Inspiratory Resistance Threshold (kPa) | Desired Magnitude-Frequency Characteristics |
|---|---|---|---|---|
| 10 | 1/6 | 0.65 | ≤0.49 | ≤0.754 |
| 20 | 1/3 | 1.3 | ≤0.64 | ≤0.492 |
| 30 | 1/2 | 1.95 | ≤0.78 | ≤0.4 |
| 45 | 3/4 | 2.9 | ≤0.88 | ≤0.303 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pan, R.; Lin, G.; Shi, Z.; Zeng, Y.; Yang, X. The Application of Disturbance-Observer-Based Control in Breath Pressure Control of Aviation Electronic Oxygen Regulator. Energies 2021, 14, 5189. https://doi.org/10.3390/en14165189
Pan R, Lin G, Shi Z, Zeng Y, Yang X. The Application of Disturbance-Observer-Based Control in Breath Pressure Control of Aviation Electronic Oxygen Regulator. Energies. 2021; 14(16):5189. https://doi.org/10.3390/en14165189
Chicago/Turabian StylePan, Rui, Guiping Lin, Zhigao Shi, Yu Zeng, and Xue Yang. 2021. "The Application of Disturbance-Observer-Based Control in Breath Pressure Control of Aviation Electronic Oxygen Regulator" Energies 14, no. 16: 5189. https://doi.org/10.3390/en14165189