
Dynamics Analysis Using Koopman Mode Decomposition of a Microgrid Including Virtual Synchronous Generator-Based Inverters



Abstract
:
1. Introduction
2. Theory of the Koopman Operator (KO) and Koopman Mode Decomposition (KMD)
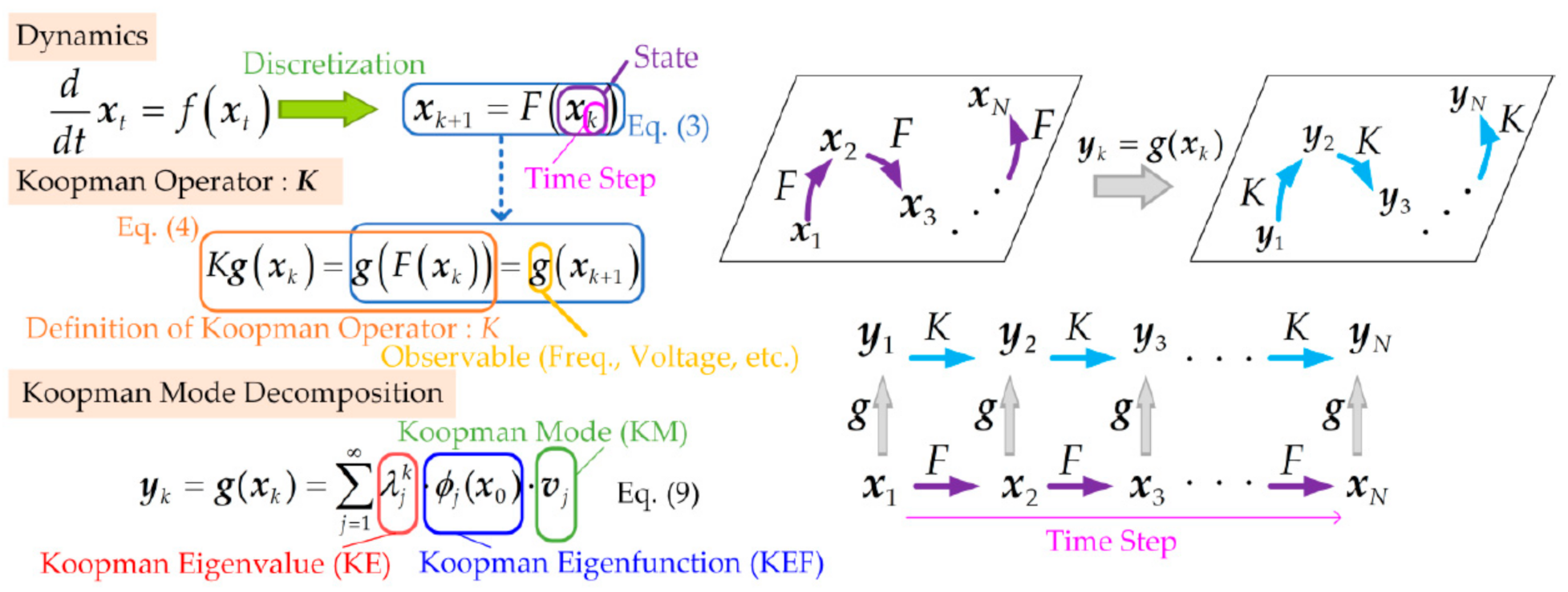
2.1. Koopman Operator (KO)
2.2. Koopman Mode Decomposition
2.3. Arnoldi Algorithm
3. Transient Responses of Power Systems
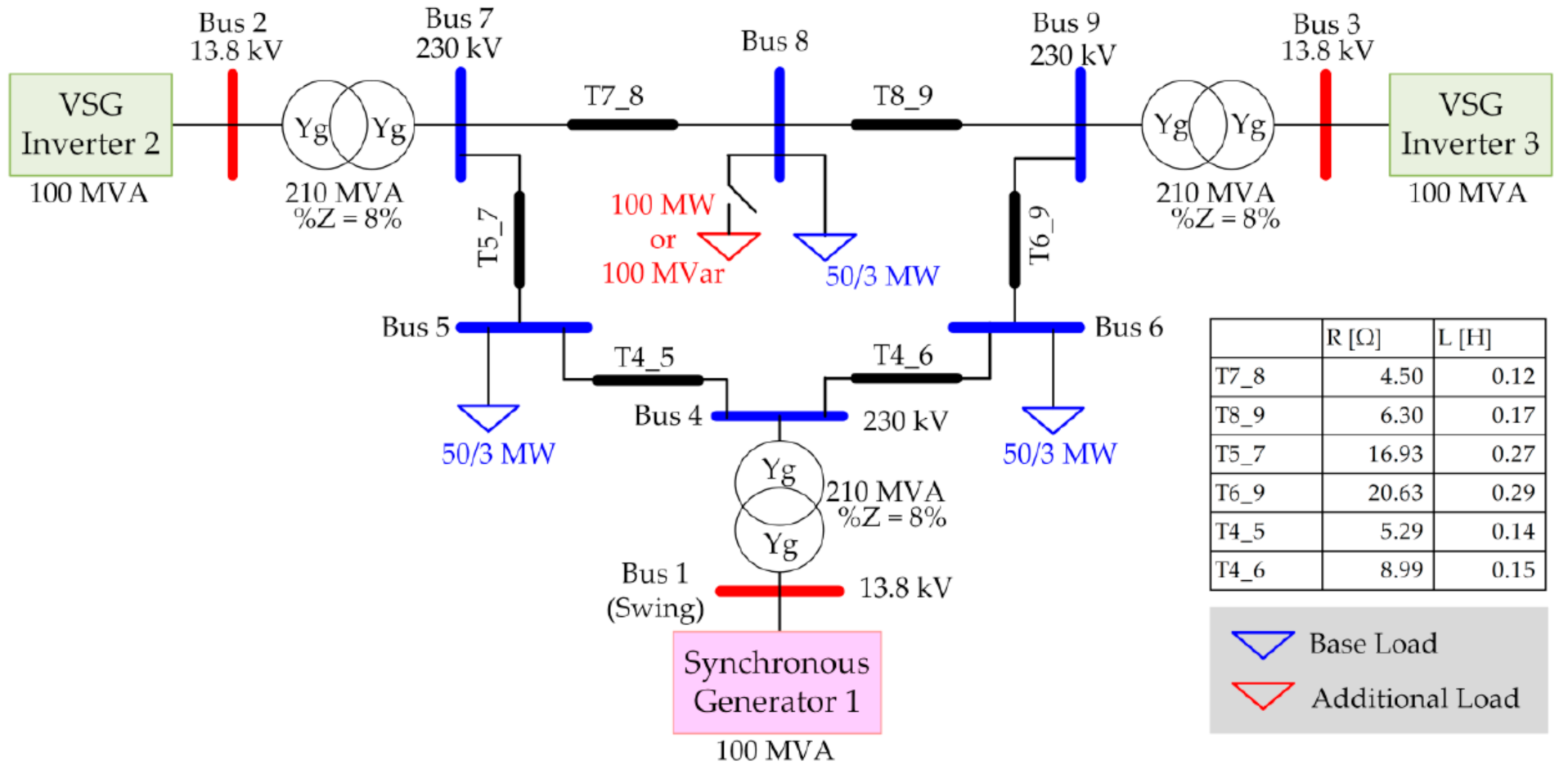
3.1. IEEE Nine-Bus Model Test System
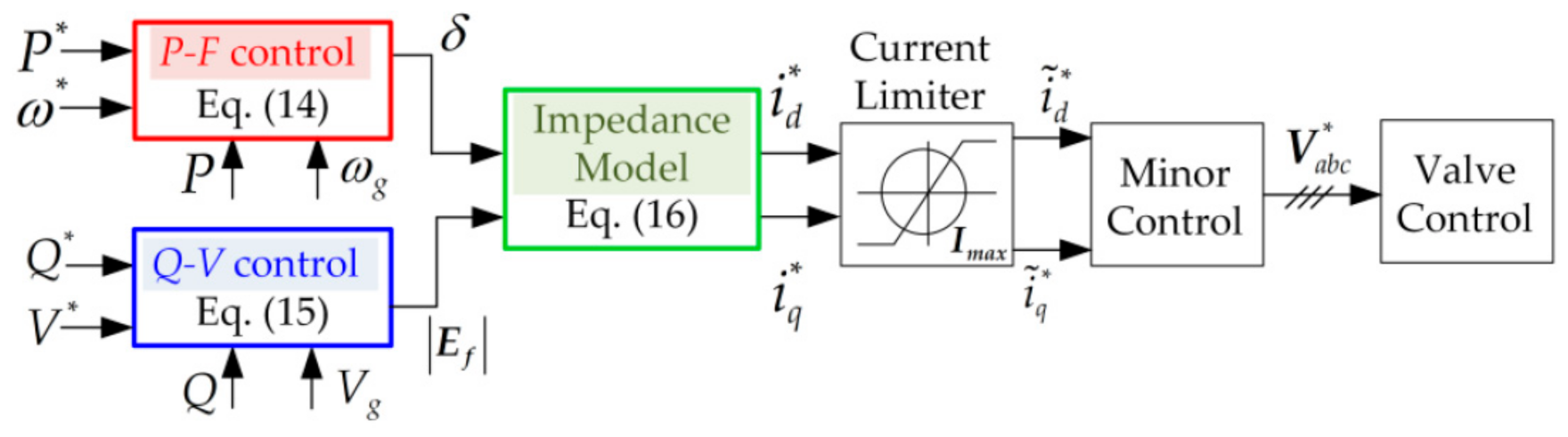
3.2. Virtual Synchronous Generator Control Model
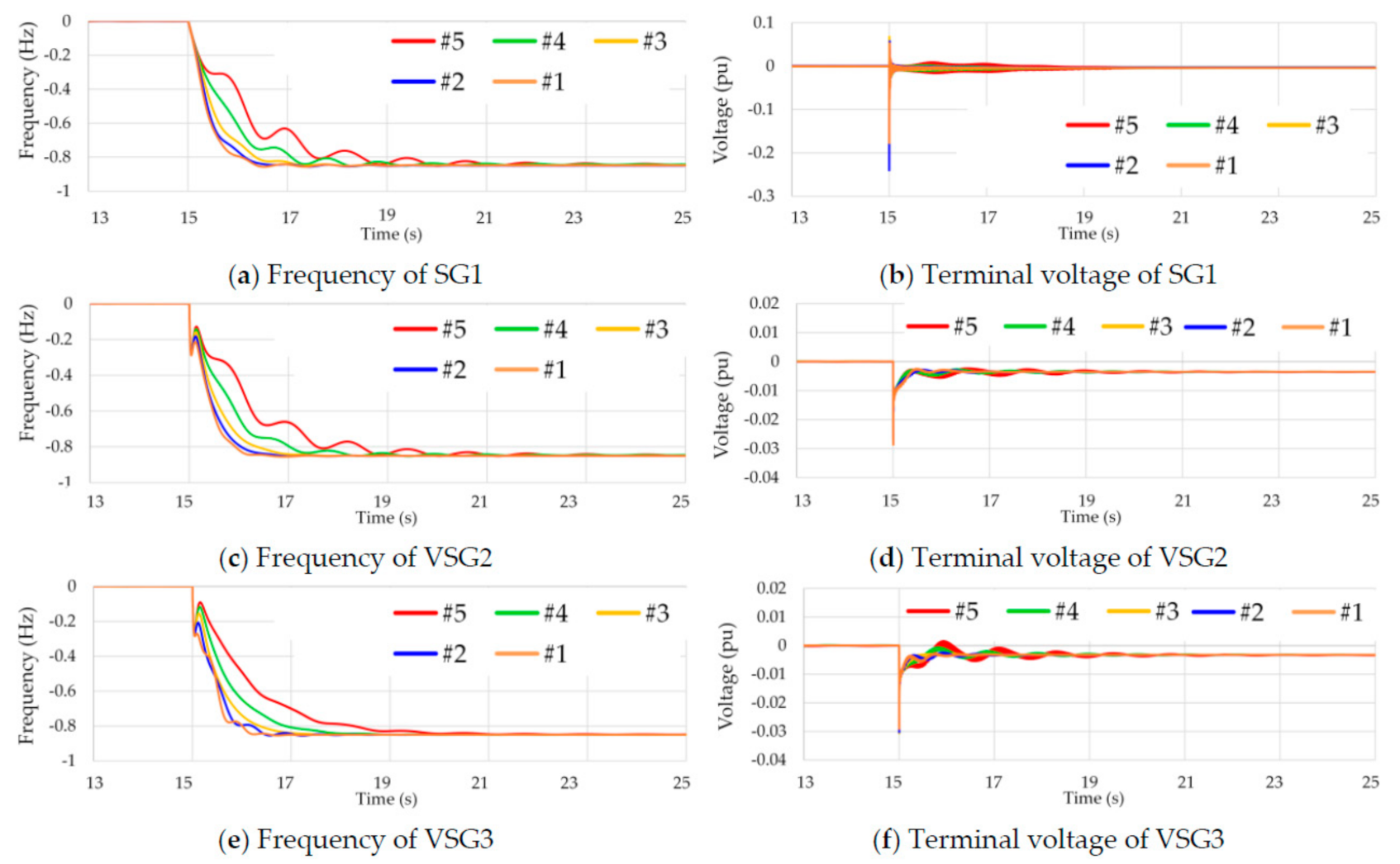
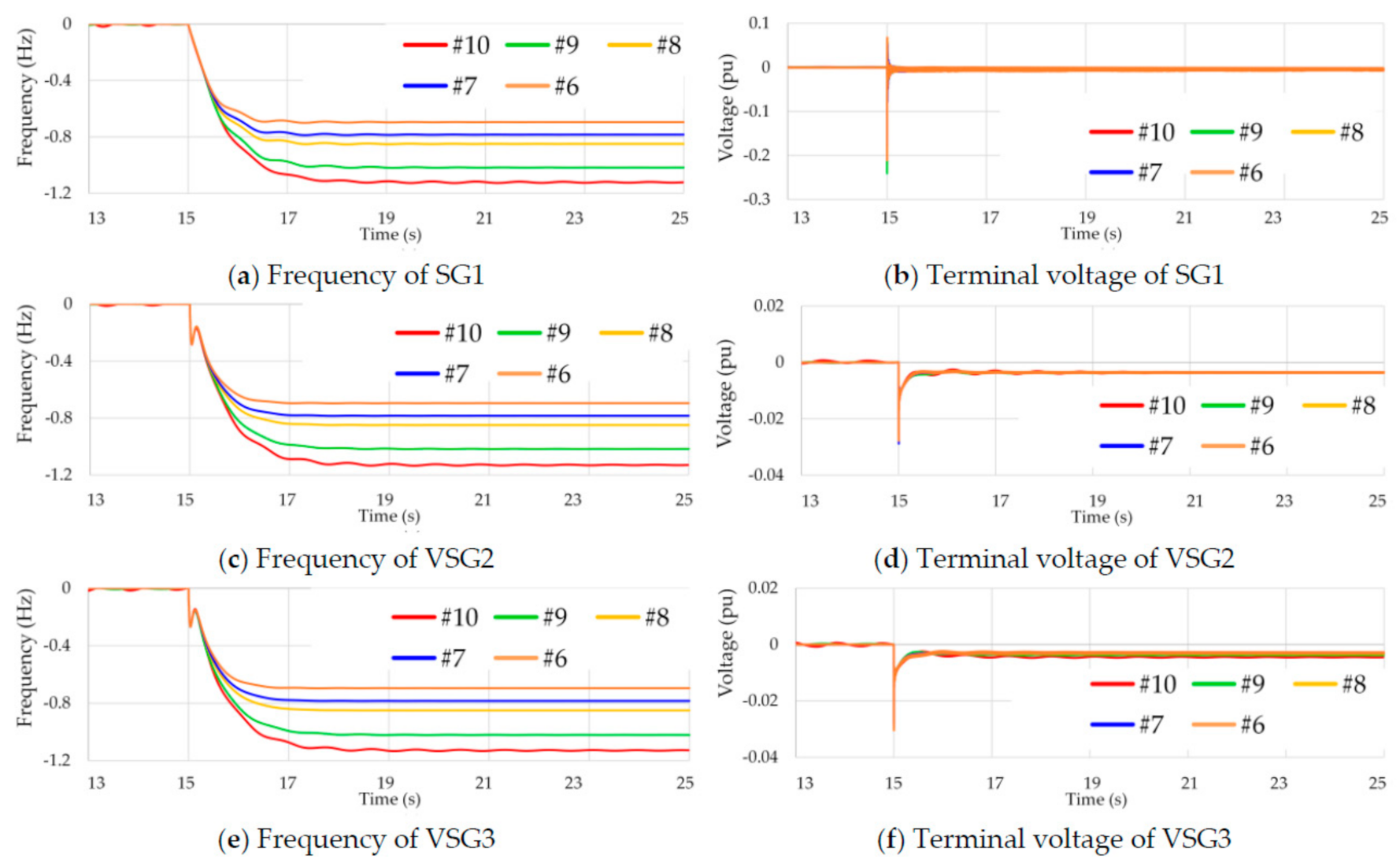
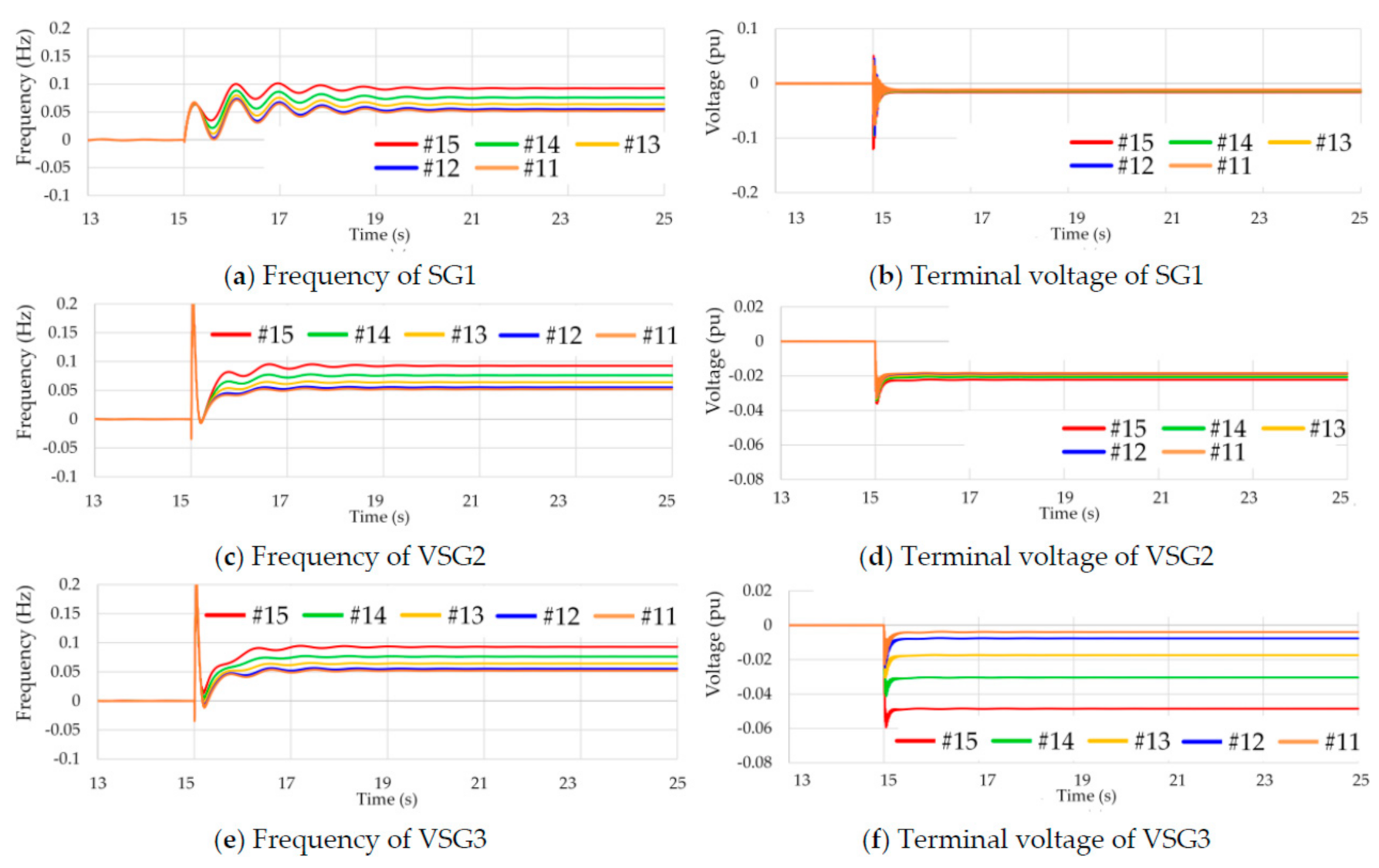
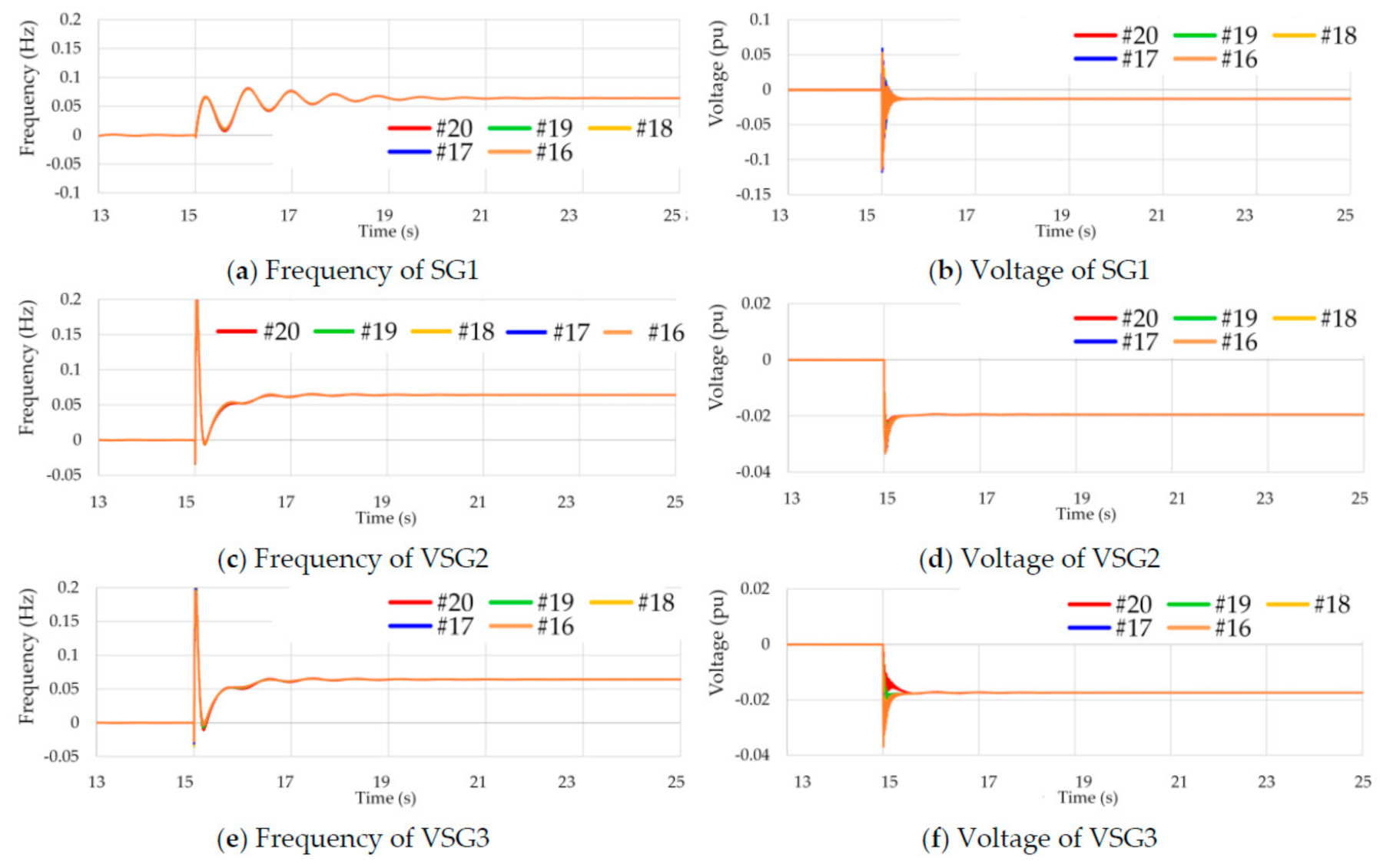
3.3. Simulation Tests
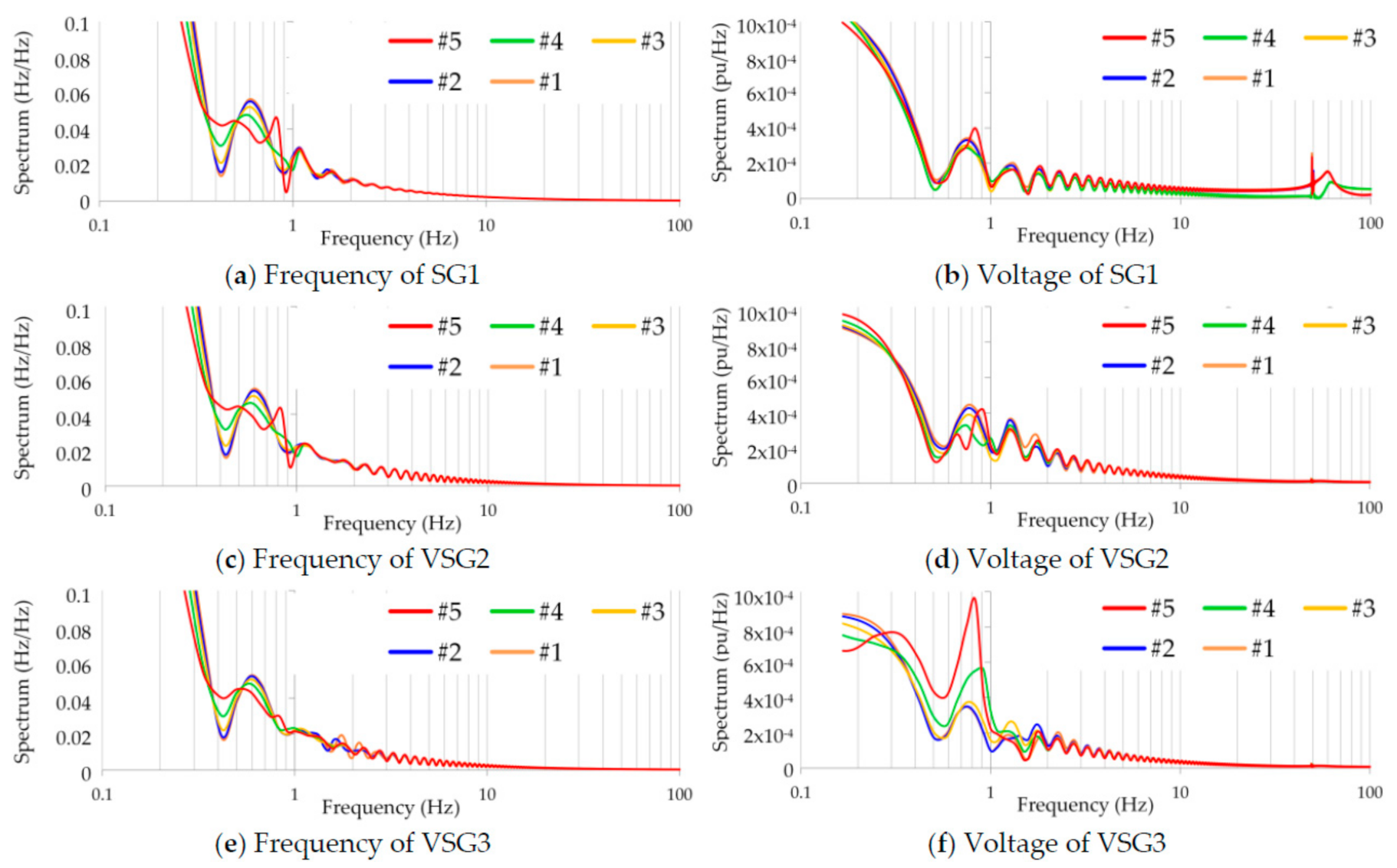
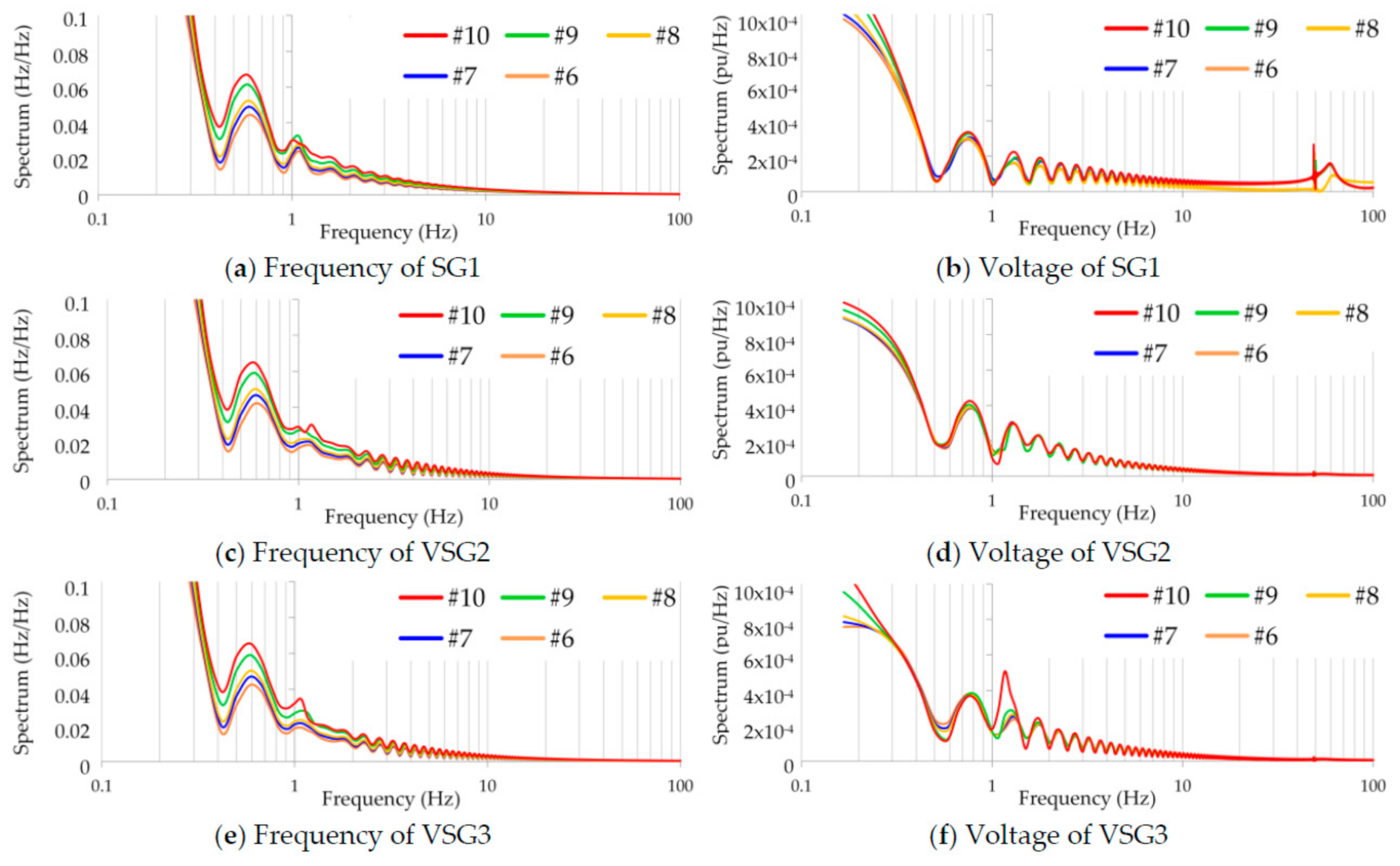
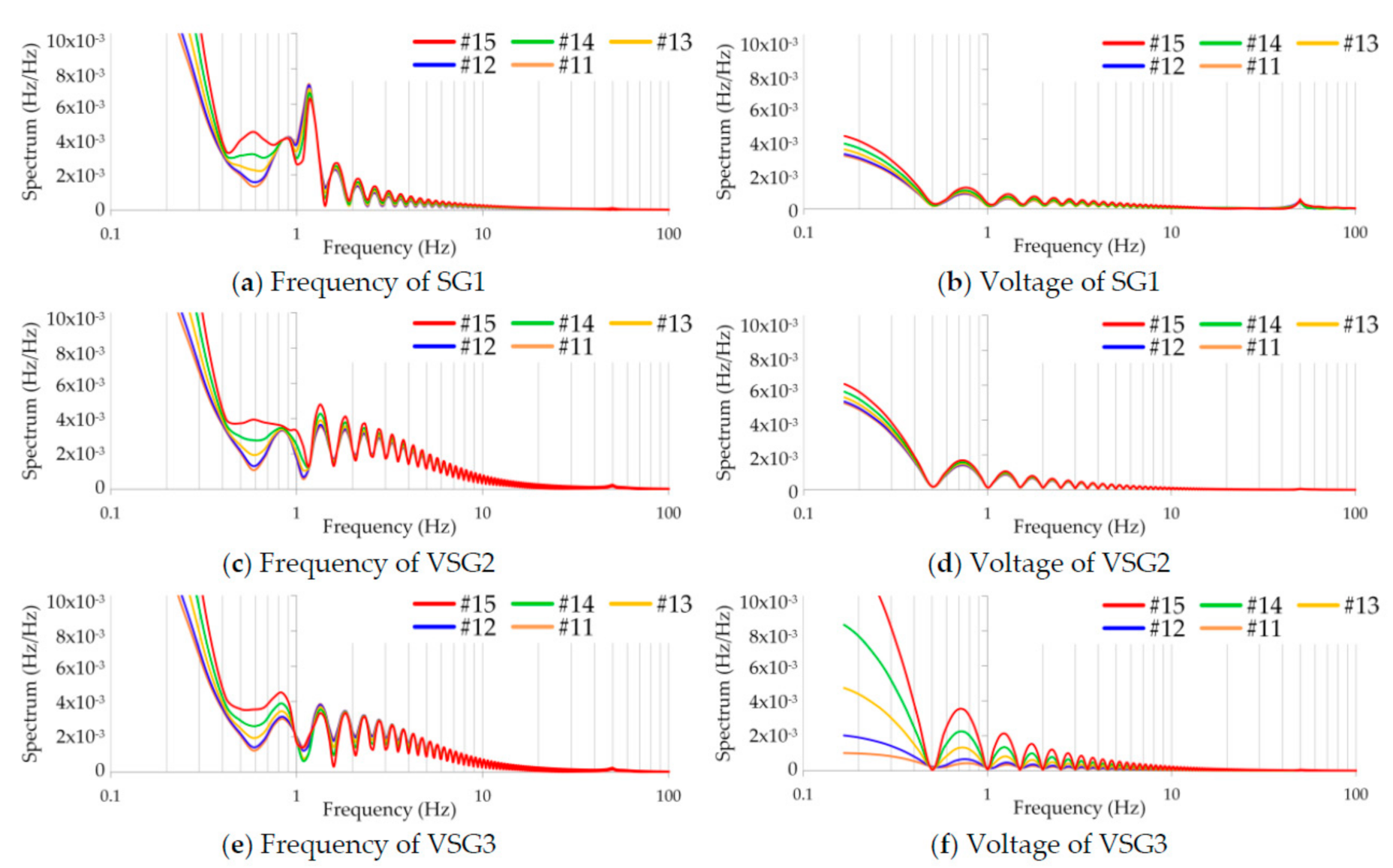
3.4. Transient and Frequency Response Analyses of Simulation Results
4. Koopman Mode Decompositions (KMDs) of Power System Observables
5. Conclusions
- The inverters that connect DERs to power grids comprise control loops for active/reactive power and frequency/voltage, and thus interfere with each other and exhibit nonlinear characteristics.
- The system stability contribution function for the synchronization power of a smart inverter is an interference factor between power supplies, and it is difficult to perform mathematical analyses for complicated connection configurations.
- Functions such as the fault ride-through (FRT) in the grid code require fast responsiveness from the grid-connected inverters, which depends on the detailed data acquisition and accurate numerical analysis of these operations.
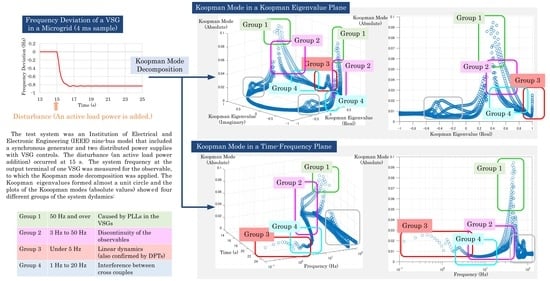
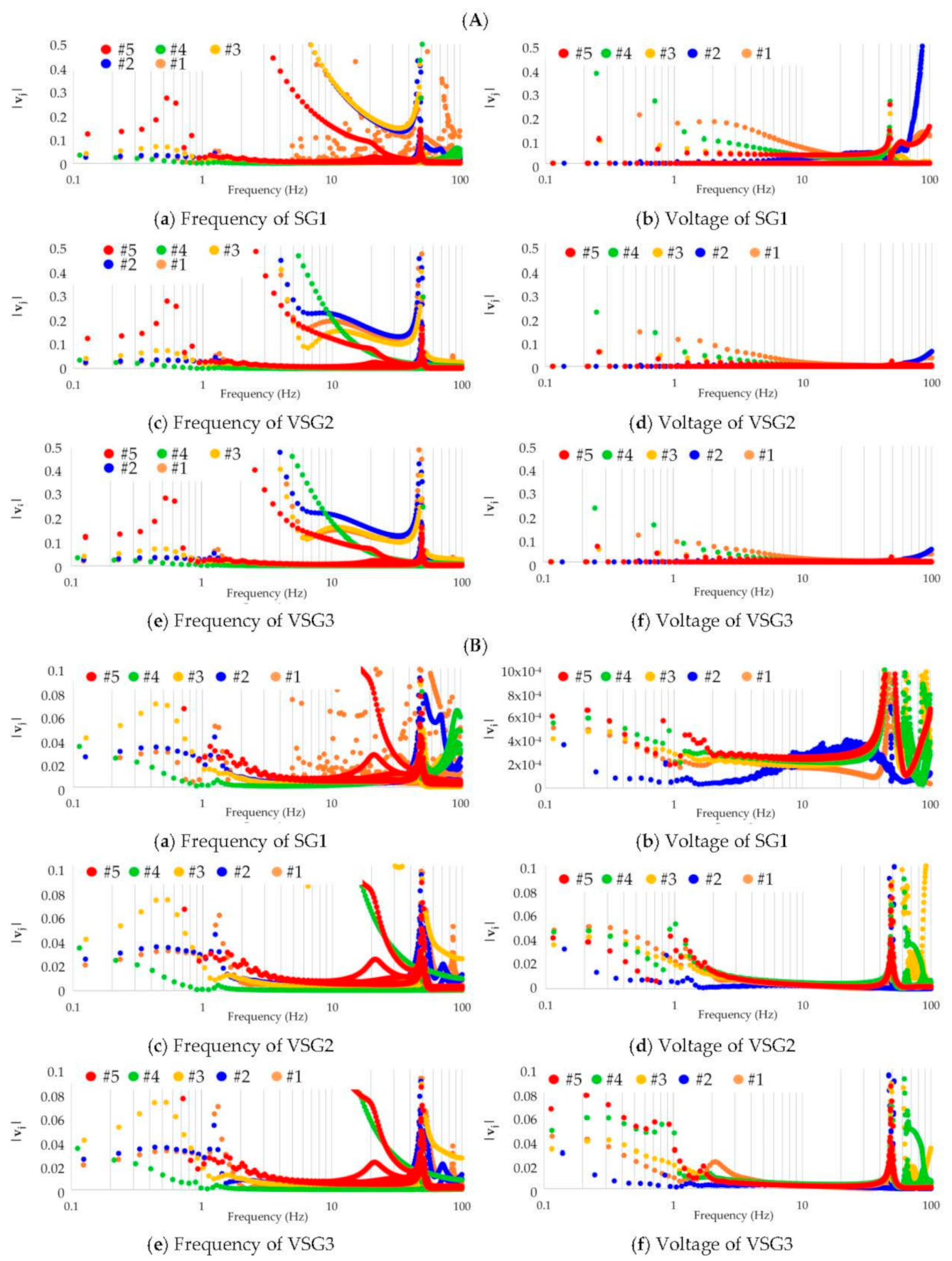
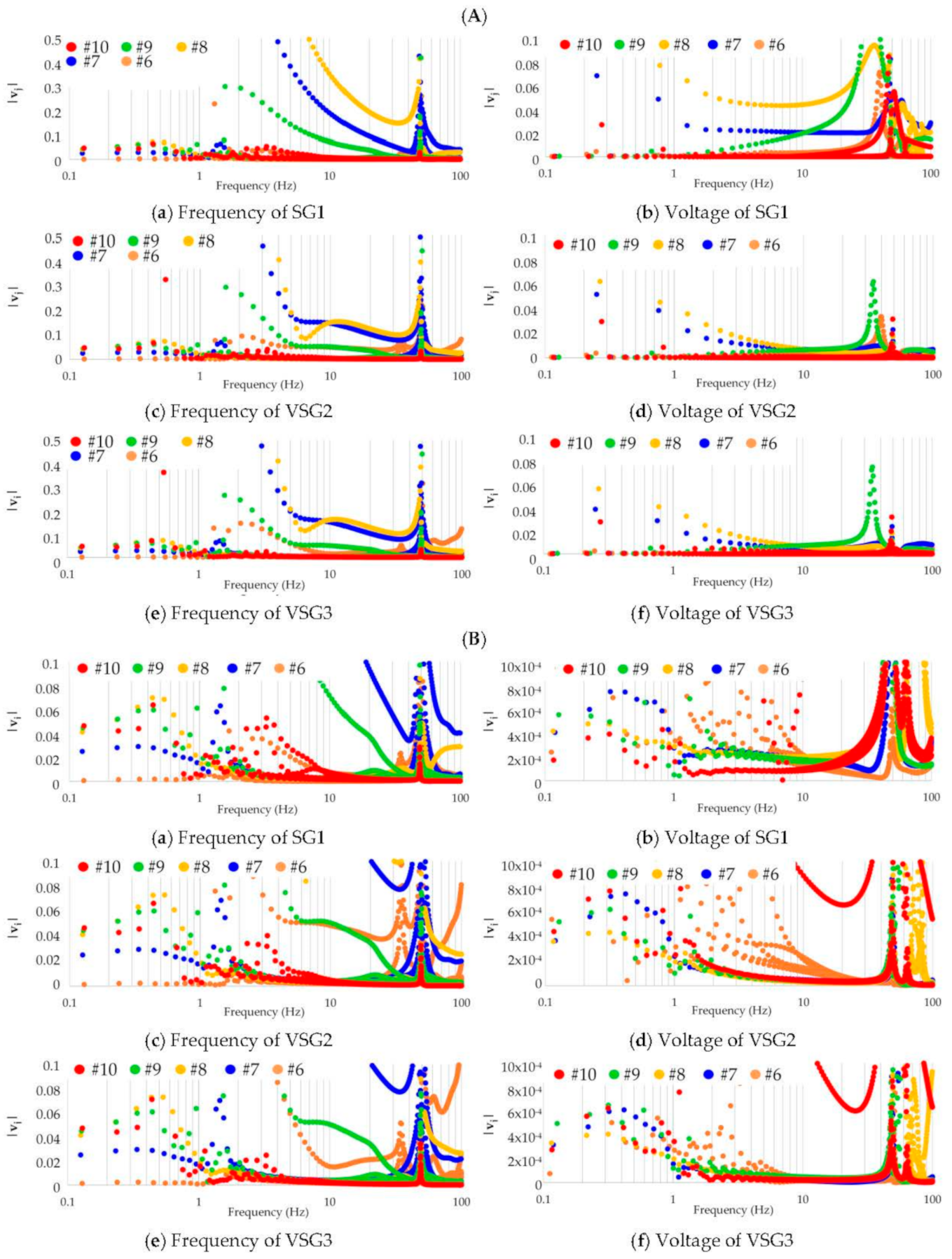
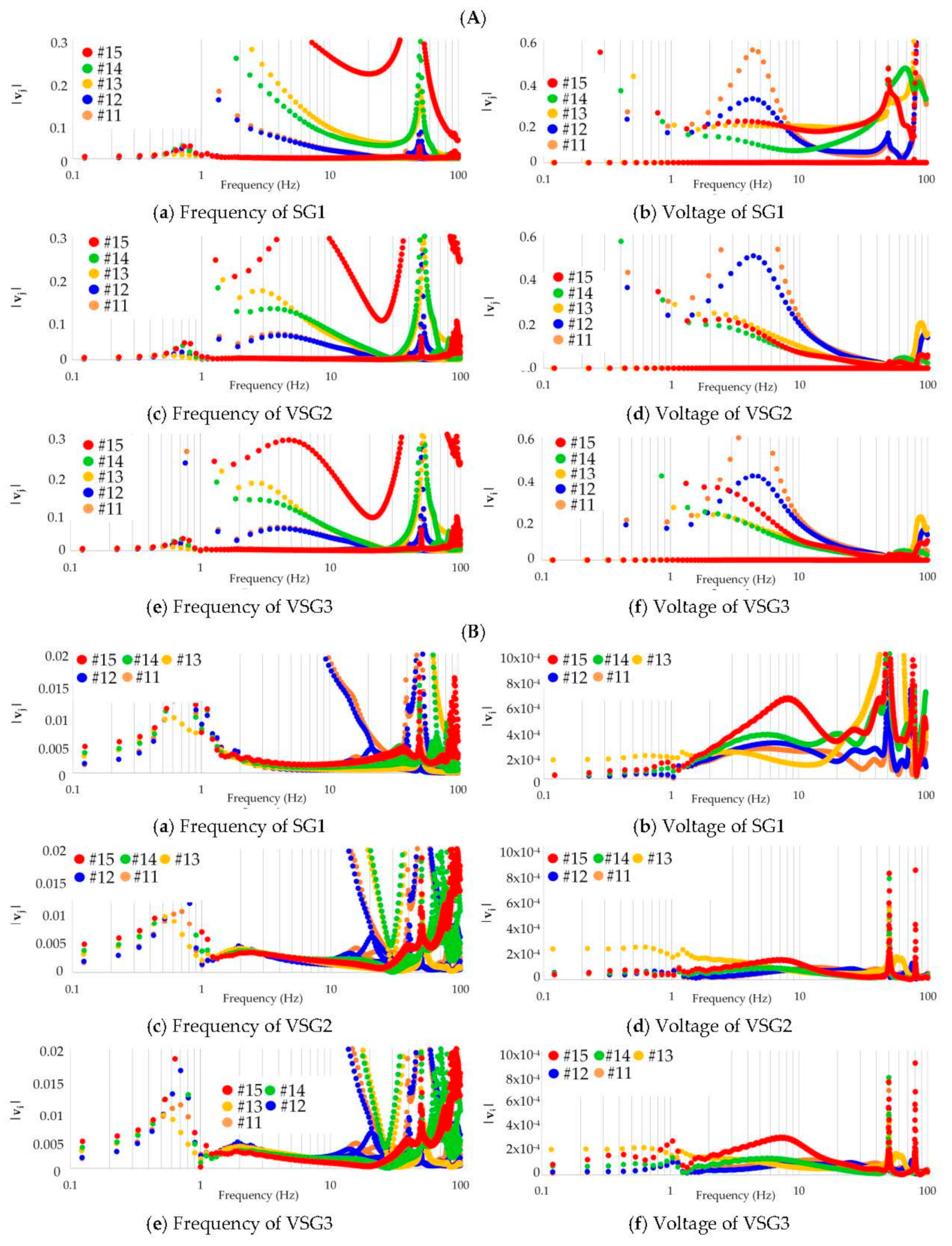
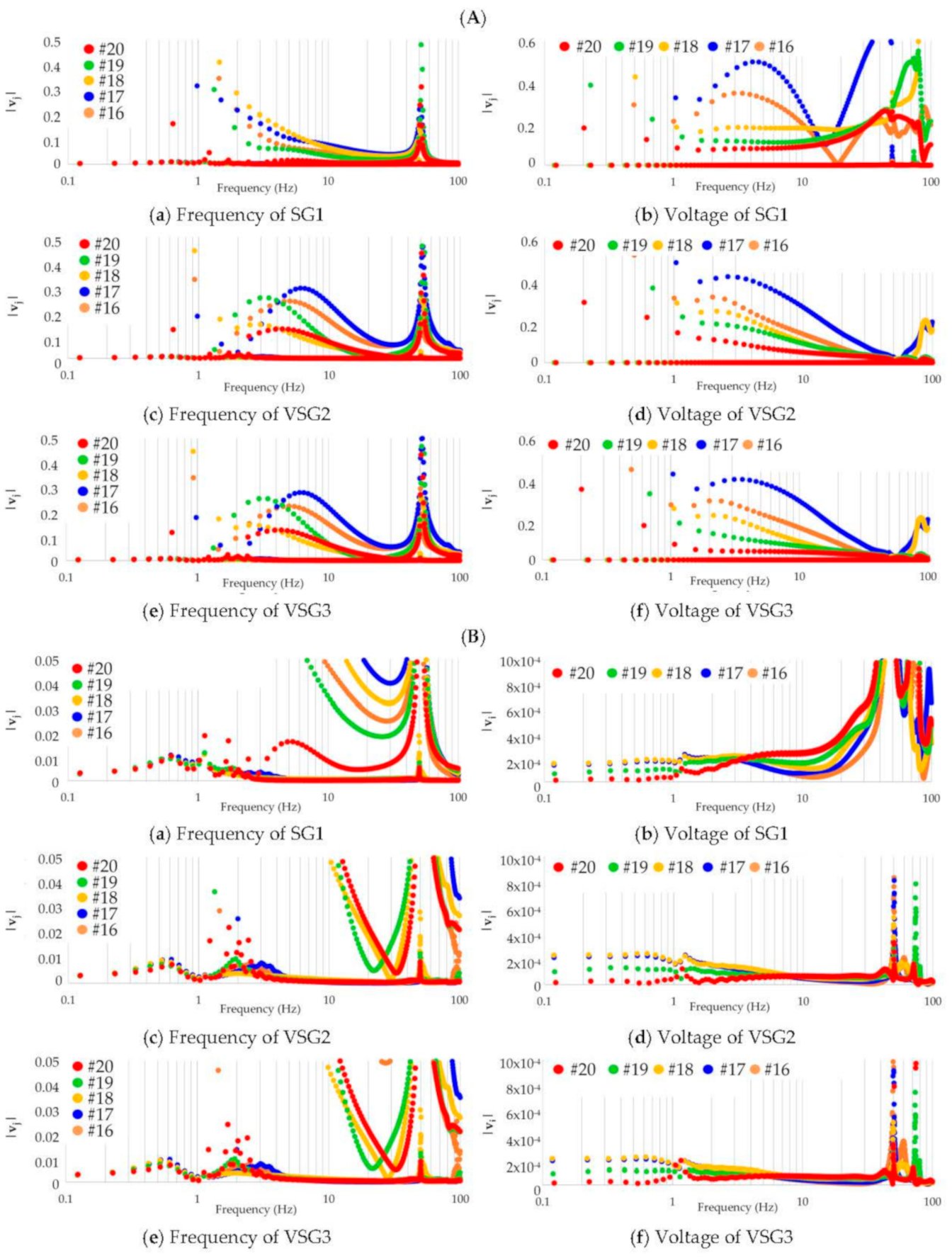
- The KMs calculated by using the Arnoldi algorithm in this study are approximations of the eigenfunctions of the KO. That is, when a system is series-expanded using the KEs and KEFs of the KO as the base, there are series terms represented by specific KEs and KEFs.
- Even if the frequency bands of the KEs are almost identical, the absolute values of the KM components tend to be divided into large and small groups. The absolute values of both differ by several orders of magnitude.
- The results obtained from the KMD method have KMs with large absolute values that cannot be confirmed by the DFT. Such power spectrum that does not appear in the DFT but appears only in the KMD can be considered to represent the nonlinearity in the dynamics. The simulation results indicate the power spectrum contained in the observables (frequency and voltage) that fluctuate discontinuously when the load power added.
- The AC power system is generally controlled in the dq reference frame. Therefore, the cross-couple effect due to the asymmetric term, which causes interference between the d-axis and q-axis control, must be determined. Although it is generally difficult to formulate the nonlinearity in the dynamics and analyze the control crossloops, KMD can clearly reveal these effects in the frequency bands at particular KEs. In the simulation tests of this study, it was confirmed that changes in active power affect not only system frequency but also terminal voltage by changing the control parameters of the inverter. Similarly, changes of the reactive power effect the system frequency as well as the terminal voltage.
- Confirmation of how KMs with large absolute values behave in actual systems;
- Indexing of the magnitudes of the absolute values of the KM components;
- Quantification of the errors caused by observable measurement delays and sampling cycles;
- Sensitivity analysis with KMs comprising a wider range of control parameters, compared to this study; and
- Comparison of the computer load and calculation time with those of conventional methods such as DFT.
Author Contributions
Funding
Conflicts of Interest
References
- Mo, O.; D’Arco, S.; Suul, J.A. Evaluation of virtual synchronous machines with dynamic or quasi-stationary machine models. IEEE Trans. Ind. Electron. 2016, 64, 5952–5962. [Google Scholar] [CrossRef] [Green Version]
- Hirase, Y.; Sugimoto, K.; Sakimoto, K.; Ise, T. Analysis of resonance in microgrids and effects of system frequency stabilization using a virtual synchronous generator. IEEE J. Emerg. Sel. Top. Power Electron. 2016, 4, 1287–1298. [Google Scholar] [CrossRef]
- Zhong, Q.C.; Konstantopoulos, G.C.; Ren, B.; Krstic, M. Improved synchronverters with bounded frequency and voltage for smart grid integration. IEEE Trans. Smart Grid 2017, 9, 786–796. [Google Scholar] [CrossRef] [Green Version]
- Hirase, Y.; Abe, K.; Sugimoto, K.; Sakimoto, K.; Bevrani, H.; Ise, T. A novel control approach for virtual synchronous generators to suppress frequency and voltage fluctuations in microgrids. Appl. Energy 2018, 210, 699–710. [Google Scholar] [CrossRef]
- Hirase, Y. Guidelines for required grid-supportive functions in grid-tied inverters with distributed energy resources. IET Energy Syst. Integr. 2019, 1, 236–245. [Google Scholar] [CrossRef]
- Hirase, Y.; Uezaki, K.; Orihara, D.; Kikusato, H.; Hashimoto, J. Characteristic analysis and indexing of multimachine transient stabilization using virtual synchronous generator control. Energies 2021, 14, 366. [Google Scholar] [CrossRef]
- Hashimoto, J.; Ustun, T.S.; Otani, K. Smart inverter functionality testing for battery energy storage systems. Smart Grid Renew. Energy 2017, 8, 337–350. [Google Scholar] [CrossRef] [Green Version]
- Montoya, J.; Brandl, R.; Vishwanath, K.; Johnson, J.; Darbali-Zamora, R.; Summers, A.; Hashimoto, J.; Kikusato, H.; Ustun, T.S.; Ninad, N.; et al. Advanced laboratory testing methods using real-time simulation and hardware-in-the-loop techniques: A survey of smart grid international research facility network activities. Energies 2020, 13, 3267. [Google Scholar] [CrossRef]
- Park, S.; Ryu, S.; Choi, Y.; Kim, J.; Kim, H. Data-driven baseline estimation of residential buildings for demand response. Energies 2015, 8, 10239–10259. [Google Scholar] [CrossRef] [Green Version]
- Gorjão, L.R.; Anvari, M.; Kantz, H.; Beck, C.; Witthaut, D.; Timme, M.; Schäfer, B. Data-driven model of the power-grid frequency dynamics. IEEE Access 2020, 8, 43082–43097. [Google Scholar] [CrossRef]
- Xinhui, C.; Kaigang, M.; Xinyuan, M.; Xiaohua, Z.; Fangwei, D.; Tie, L.; Dai, C. A data-driven slow dynamic characteristic extraction and state estimation method for large power grid. In Proceedings of the 2020 IEEE 3rd Student Conference on Electrical Machines and Systems (SCEMS), Jinan, China, 4–6 December 2020; pp. 39–42. [Google Scholar] [CrossRef]
- Li, X.; Jiang, T.; Yuan, H.; Cui, H.; Li, F.; Li, G.; Jia, H. An eigensystem realization algorithm-based data-driven approach for extracting electromechanical oscillation dynamic patterns from synchrophasor measurements in bulk power grids. Int. J. Electr. Power Energy Syst. 2020, 116, 105549. [Google Scholar] [CrossRef]
- Almunif, A.; Fan, L.; Miao, Z. A tutorial on data-driven eigenvalue identification: Prony analysis, matrix pencil, and eigensystem realization algorithm. Int. Trans. Electr. Energy Syst. 2020, 30, e12283. [Google Scholar] [CrossRef] [Green Version]
- Liu, S.; Shi, R.; Huang, Y.; Li, X.; Li, Z.; Wang, L.; Mao, D.; Liu, L.; Liao, S.; Zhang, M. A data-driven and data-based framework for online voltage stability assessment using partial mutual information and iterated random forest. Energies 2021, 14, 715. [Google Scholar] [CrossRef]
- Mezić, I. Spectral properties of dynamical systems, model reduction and decompositions. Nonlinear Dyn. 2005, 41, 309–325. [Google Scholar] [CrossRef]
- Koopman, B.O. Hamiltonian systems and transformation in Hilbert space. Proc. Natl. Acad. Sci. USA 1931, 17, 315–318. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chen, K.K.; Tu, J.H.; Rowley, C.W. Variants of dynamic mode decomposition: Boundary condition, Koopman, and Fourier analyses. J. Nonlinear Sci. 2012, 22, 887–915. [Google Scholar] [CrossRef]
- Cho, M.; Yamazaki, T. Characterizations of p-hyponormal and weak hyponormal weighted composition operators. Acta Sci. Math. 2010, 76, 173–181. [Google Scholar]
- Williams, M.O.; Kevrekidis, I.G.; Rowley, C.W. A data–driven approximation of the Koopman operator: Extending dynamic mode decomposition. J. Nonlinear Sci. 2015, 25, 1307–1346. [Google Scholar] [CrossRef] [Green Version]
- Surana, A. Koopman operator framework for time series modeling and analysis. J. Nonlinear Sci. 2018, 30, 1973–2006. [Google Scholar] [CrossRef]
- Lange, H.; Brunton, S.L.; Kutz, J.N. From Fourier to Koopman: Spectral methods for long-term time series prediction. J. Mach. Learn. Res. 2021, arXiv:2004.0057422, 1–38. [Google Scholar]
- Arbabi, H.; Mezic, I. Ergodic theory, dynamic mode decomposition, and computation of spectral properties of the Koopman operator. SIAM J. Appl. Dyn. Syst. 2017, 16, 2096–2126. [Google Scholar] [CrossRef]
- Takeishi, N.; Kawahara, Y.; Yairi, T. Subspace dynamic mode decomposition for stochastic Koopman analysis. Phys. Rev. E 2017, 96, 033310. [Google Scholar] [CrossRef] [Green Version]
- Sinha, S.; Huang, B.; Vaidya, U. On robust computation of Koopman operator and prediction in random dynamical systems. J. Nonlinear Sci. 2019, 30, 2057–2090. [Google Scholar] [CrossRef] [Green Version]
- Takeishi, N.; Kawahara, Y.; Yairi, T. Learning Koopman invariant subspaces for dynamic mode decomposition. arXiv 2017, arXiv:1710.04340. [Google Scholar]
- Črnjarić-Žic, N.; Maćešić, S.; Mezić, I. Koopman operator spectrum for random dynamical systems. J. Nonlinear Sci. 2019, 30, 2007–2056. [Google Scholar] [CrossRef] [Green Version]
- Susuki, Y.; Mezić, I. Nonlinear Koopman modes and power system stability assessment without models. IEEE Trans. Power Syst. 2013, 29, 899–907. [Google Scholar] [CrossRef] [Green Version]
- Susuki, Y.; Mezic, I.; Raak, F.; Hikihara, T. Applied Koopman operator theory for power systems technology. Nonlinear Theory Appl. IEICE 2016, 7, 430–459. [Google Scholar] [CrossRef] [Green Version]
- Jlassi, Z.; Kilani, K.B.; Elleuch, M.; Mili, L. Koopman mode analysis of power systems oscillations. In Proceedings of the 2016 International Conference on Electrical Sciences and Technologies in Maghreb (CISTEM), Marrakesh, Morocco, 26–28 October 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Korda, M.; Susuki, Y.; Mezić, I. Power grid transient stabilization using Koopman model predictive control. IFAC Pap. 2018, 51, 297–302. [Google Scholar] [CrossRef]
- Hernandez-Ortega, M.; Messina, A. Nonlinear power system analysis using Koopman mode decomposition and perturbation theory. IEEE Trans. Power Syst. 2018, 33, 5124–5134. [Google Scholar] [CrossRef]
- Cassamo, N.; van Wingerden, J.-W. On the potential of reduced order models for wind farm control: A Koopman dynamic mode decomposition approach. Energies 2020, 13, 6513. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Machine | Test | Droop Constant | Unit Inertia Constant | Droop Constant | |
|---|---|---|---|---|---|
| (-) | (s) | (-) | (s) | ||
| SG1 | 1–20 | 0.05 | 12 | 0.05 | 0.015 |
| VSG2 | 1–20 | 0.05 | 12 | 0.05 | 0.015 |
| VSG3 | 1 | 0.05 | 3 | 0.05 | 0.015 |
| 2 | 6 | ||||
| 3 | 12 | ||||
| 4 | 24 | ||||
| 5 | 48 | ||||
| 6 | 0.03 | 12 | 0.05 | 0.015 | |
| 7 | 0.04 | ||||
| 8 | 0.05 | ||||
| 9 | 0.1 | ||||
| 10 | 0.2 | ||||
| 11 | 0.05 | 12 | 0.01 | 0.015 | |
| 12 | 0.02 | ||||
| 13 | 0.05 | ||||
| 14 | 0.1 | ||||
| 15 | 0.2 | ||||
| 16 | 0.05 | 12 | 0.05 | 0.001 | |
| 17 | 0.005 | ||||
| 18 | 0.015 | ||||
| 19 | 0.5 | ||||
| 20 | 1.5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hirase, Y.; Ohara, Y.; Matsuura, N.; Yamazaki, T. Dynamics Analysis Using Koopman Mode Decomposition of a Microgrid Including Virtual Synchronous Generator-Based Inverters. Energies 2021, 14, 4581. https://doi.org/10.3390/en14154581
Hirase Y, Ohara Y, Matsuura N, Yamazaki T. Dynamics Analysis Using Koopman Mode Decomposition of a Microgrid Including Virtual Synchronous Generator-Based Inverters. Energies. 2021; 14(15):4581. https://doi.org/10.3390/en14154581
Chicago/Turabian StyleHirase, Yuko, Yuki Ohara, Naoya Matsuura, and Takeaki Yamazaki. 2021. "Dynamics Analysis Using Koopman Mode Decomposition of a Microgrid Including Virtual Synchronous Generator-Based Inverters" Energies 14, no. 15: 4581. https://doi.org/10.3390/en14154581