
A Review of Modeling and Diagnostic Techniques for Eccentricity Fault in Electric Machines


Abstract
:1. Introduction
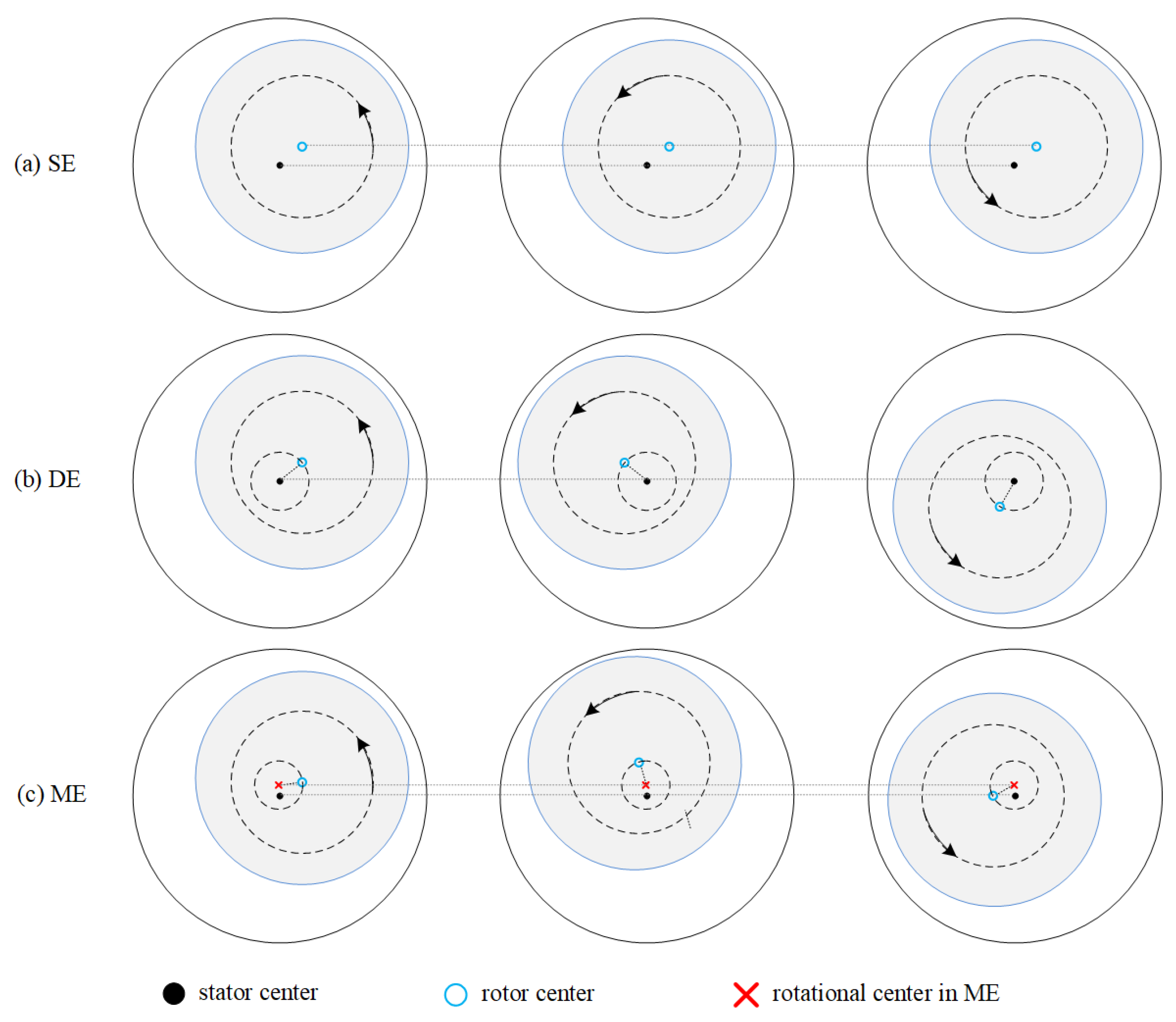
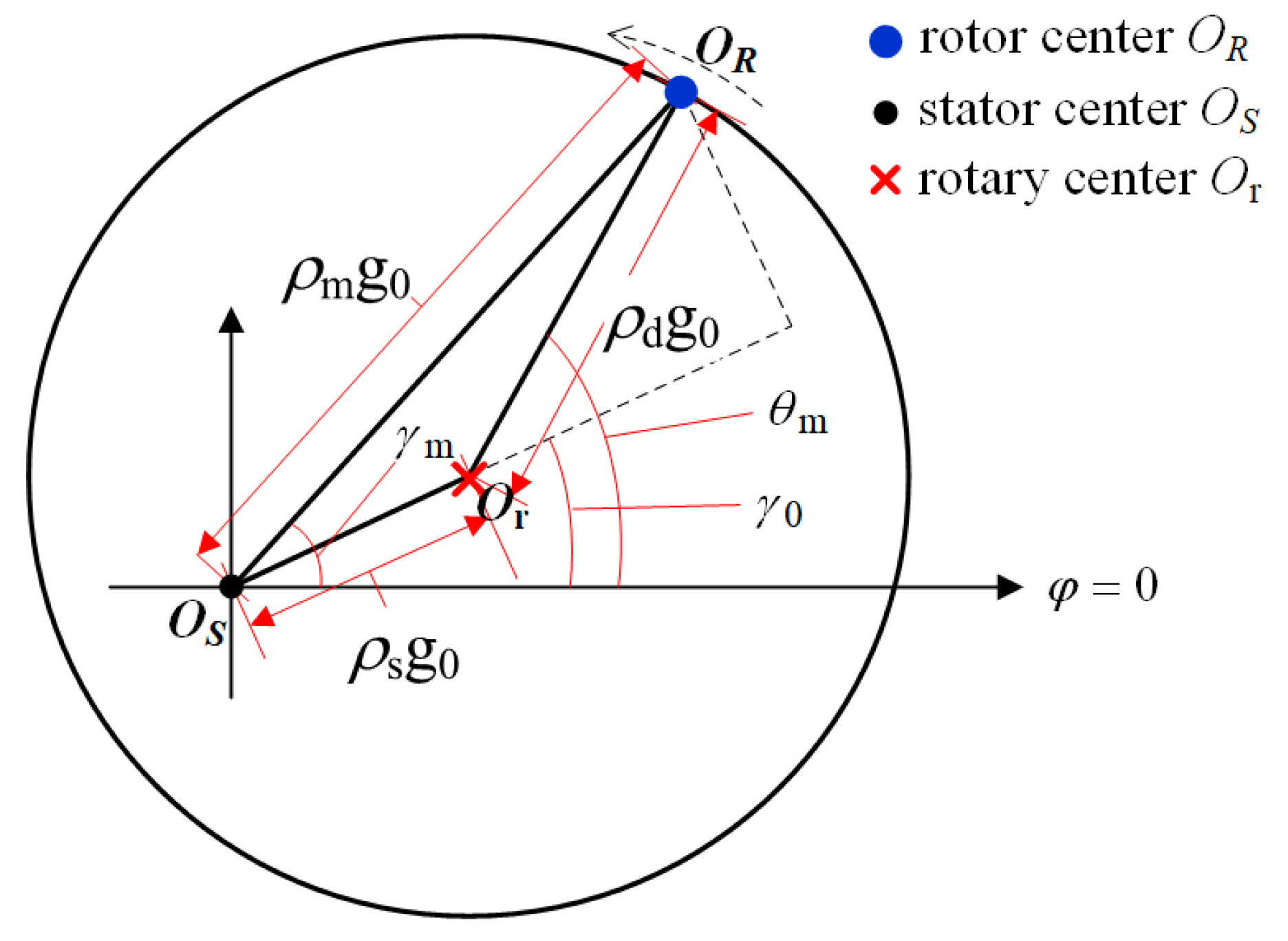
2. Rotor Eccentricity
3. Modeling of Machines with Eccentricities
4. Model-Based Diagnosis
4.1. Simulation Model Analysis
4.2. MMF-Permeance Analysis
4.3. Instantaneous Power Analysis
4.4. Coordinate Transform
4.5. Auxiliary Voltage Injection
4.6. Sensor-Based Detection
4.7. Observer-Based Approaches
5. Signal and Data Based Diagnosis
5.1. Signal-Processing Techniques
5.2. Data-Driven Algorithms
6. Separation with Other Faults
6.1. Separation with Load Torque Oscillation
6.2. Separation with PD
6.3. Separation with ITSC
7. Discussion on Continued Research
8. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Antonino-Daviu, J.A.; Quijano-Lopez, A.; Rubbiolo, M.; Climente-Alarcon, V. Advanced analysis of motor currents for the diagnosis of the rotor condition in electric motors operating in mining facilities. IEEE Trans. Ind. Appl. 2018, 54, 3934–3942. [Google Scholar] [CrossRef]
- Choi, S.; Haque, M.S.; Tarek, M.T.B.; Mulpuri, V.; Duan, Y.; Das, S.; Garg, V.; Ionel, D.M.; Masrur, M.A.; Mirafzal, B.; et al. Fault diagnosis techniques for permanent magnet ac machine and drives—A review of current state of the art. IEEE Trans. Transp. Electrif. 2018, 4, 444–463. [Google Scholar] [CrossRef]
- Henao, H.; Capolino, G.A.; Fernandez-Cabanas, M.; Filippetti, F.; Bruzzese, C.; Strangas, E.; Pusca, R.; Estima, J.; Riera-Guasp, M.; Hedayati-Kia, S. Trends in fault diagnosis for electrical machines: A review of diagnostic techniques. IEEE Ind. Electron. Mag. 2014, 8, 31–42. [Google Scholar] [CrossRef]
- Artigao, E.; Honrubia-Escribano, A.; Gómez-Lázaro, E. In-service wind turbine DFIG diagnosis using current signature analysis. IEEE Trans. Ind. Electron. 2020, 67, 2262–2271. [Google Scholar] [CrossRef]
- Faiz, J.; Nejadi-Koti, H. Eccentricity fault diagnosis indices for permanent magnet machines: State-of-the-art. IET Electr. Power Appl. 2019, 13, 1241–1254. [Google Scholar] [CrossRef]
- Faiz, J.; Ojaghi, M. Different indexes for eccentricity faults diagnosis in three-phase squirrel-cage induction motors: A review. Mechatronics 2009, 19, 2–13. [Google Scholar] [CrossRef]
- Faiz, J.; Moosavi, S. Eccentricity fault detection—From induction machines to DFIG—A review. Renew. Sustain. Energy Rev. 2016, 55, 169–179. [Google Scholar] [CrossRef]
- Salah, A.A.; Dorrell, D.G.; Guo, Y. A Review of the Monitoring and Damping Unbalanced Magnetic Pull in Induction Machines Due to Rotor Eccentricity. IEEE Trans. Ind. Appl. 2019, 55, 2569–2580. [Google Scholar] [CrossRef]
- Aggarwal, A.; Strangas, E.G. Review of Detection Methods of Static Eccentricity for Interior Permanent Magnet Synchronous Machine. Energies 2019, 12, 4105. [Google Scholar] [CrossRef] [Green Version]
- Riera-Guasp, M.; Antonino-Daviu, J.A.; Capolino, G.A. Advances in electrical machine, power electronic, and drive condition monitoring and fault detection: State of the art. IEEE Trans. Ind. Electron. 2014, 62, 1746–1759. [Google Scholar] [CrossRef]
- Faiz, J.; Ghods, M.; Tajdyni, A. Dynamic air gap asymmetry fault detection in single-sided linear induction motors. IET Electr. Power Appl. 2019, 14, 605–613. [Google Scholar] [CrossRef]
- Di, C.; Bao, X.; Wang, H.; Lv, Q.; He, Y. Modeling and analysis of unbalanced magnetic pull in cage induction motors with curved dynamic eccentricity. IEEE Trans. Magn. 2015, 51, 1–7. [Google Scholar]
- Nandi, S.; Toliyat, H.A.; Li, X. Condition monitoring and fault diagnosis of electrical motors—A review. IEEE Trans. Energy Convers. 2005, 20, 719–729. [Google Scholar] [CrossRef]
- Nandi, S.; Ahmed, S.; Toliyat, H.A. Detection of rotor slot and other eccentricity related harmonics in a three phase induction motor with different rotor cages. IEEE Trans. Energy Convers. 2001, 16, 253–260. [Google Scholar] [CrossRef]
- Liu, Z.; Huang, J.; He, S. Diagnosis of air-gap eccentricity and partial demagnetisation of an interior permanent magnet synchronous motor based on inverse transient complex inductance vector theory. IET Electr. Power Appl. 2018, 12, 1166–1175. [Google Scholar] [CrossRef]
- Liu, Z.; Huang, J.; Li, B. Diagnosing and distinguishing rotor eccentricity from partial demagnetisation of interior PMSM based on fluctuation of high-frequency d-axis inductance and rotor flux. IET Electr. Power Appl. 2017, 11, 1265–1275. [Google Scholar] [CrossRef]
- Iamamura, B.A.T.; Le Menach, Y.; Tounzi, A.; Sadowski, N.; Guillot, E. Study of static and dynamic eccentricities of a synchronous generator using 3-D FEM. IEEE Trans. Magn. 2010, 46, 3516–3519. [Google Scholar] [CrossRef]
- Mohr, M.; Bíró, O.; Stermecki, A.; Diwoky, F. An extended finite element based model approach for permanent magnet synchronous machines including rotor eccentricity. In Proceedings of the 39th Annual Conference of IEEE Industrial Electronics Society, Vienna, Austria, 10–13 November 2013; pp. 2596–2601. [Google Scholar]
- Fu, J.; Zhu, C. Subdomain model for predicting magnetic field in slotted surface mounted permanent-magnet machines with rotor eccentricity. IEEE Trans. Magn. 2012, 48, 1906–1917. [Google Scholar] [CrossRef]
- Taghipour Boroujeni, S.; Jalali, P.; Bianchi, N. Analytical modeling of no-load eccentric slotted surface-mounted PM machines: Cogging torque and radial force. IEEE Trans. Magn. 2017, 53, 1–8. [Google Scholar] [CrossRef]
- Li, Y.; Lu, Q.; Zhu, Z.Q. Unbalanced magnetic force prediction in permanent magnet machines with rotor eccentricity by improved superposition method. IET Electr. Power Appl. 2017, 11, 1095–1104. [Google Scholar] [CrossRef]
- Li, Y.; Lu, Q.; Zhu, Z.Q.; Wu, D.; Li, G. Superposition method for cogging torque prediction in permanent magnet machines with rotor eccentricity. IEEE Trans. Magn. 2016, 52, 1–10. [Google Scholar] [CrossRef]
- Torregrossa, D.; Khoobroo, A.; Fahimi, B. Prediction of acoustic noise and torque pulsation in PM synchronous machines with static eccentricity and partial demagnetization using field reconstruction method. IEEE Trans. Ind. Electron. 2012, 59, 934–944. [Google Scholar] [CrossRef]
- Ajily, E.; Ardebili, M.; Abbaszadeh, K. Magnet defect and rotor eccentricity modeling in axial-flux permanent-magnet machines via 3-D field reconstruction method. IEEE Trans. Energy Convers. 2016, 31, 486–495. [Google Scholar] [CrossRef]
- Jalali, P.; Taghipour Boroujeni, S.; Bianchi, N. Analytical modeling of slotless eccentric surface-mounted PM machines using a conformal transformation. IEEE Trans. Energy Convers. 2017, 32, 658–666. [Google Scholar] [CrossRef]
- Toliyat, H.A. Electric Machines: Modeling, Condition Monitoring, and Fault Diagnosis; CRC Press: Boca Raton, FL, USA, 2012. [Google Scholar]
- Faiz, J.; Ghasemi-Bijan, M. Estimation of induction machine inductances using three-dimensional magnetic equivalent circuit. IET Electr. Power Appl. 2017, 9, 117–127. [Google Scholar] [CrossRef]
- Toliyat, H.A.; Al-Nuaim, N.A. Simulation and detection of dynamic air-gap eccentricity in salient-pole synchronous machines. IEEE Trans. Ind. Appl. 1999, 35, 86–93. [Google Scholar] [CrossRef]
- Faiz, J.; Tabatabaei, I. Extension of winding function theory for nonuniform air gap in electric machinery. IEEE Trans. Magn. 2002, 38, 3654–3657. [Google Scholar] [CrossRef]
- Faiz, J.; Ojaghi, M. Unified winding function approach for dynamic simulation of different kinds of eccentricity faults in cage induction machines. IET Electr. Power Appl. 2009, 3, 461–470. [Google Scholar] [CrossRef]
- Ojaghi, M.; Nasiri, S. Modeling eccentric squirrel-cage induction motors with slotting effect and saturable teeth reluctances. IEEE Trans. Energy Convers. 2014, 29, 619–627. [Google Scholar] [CrossRef]
- Pal, R.S.C.; Mohanty, A.R.A. Simplified Dynamical Model of Mixed Eccentricity Fault in a Three-Phase Induction Motor. IEEE Trans. Ind. Electron. 2021, 68, 4341–4350. [Google Scholar] [CrossRef]
- Huang, J.; Li, B.; Jiang, H.; Kang, M. Analysis and control of multiphase permanent-magnet bearingless motor with a single set of half-coiled winding. IEEE Trans. Ind. Electron. 2014, 61, 3137–3145. [Google Scholar] [CrossRef]
- Park, J.K.; Hur, J. Detection of inter-turn and dynamic eccentricity faults using stator current frequency pattern in IPM-type BLDC motors. IEEE Trans. Ind. Electron. 2016, 63, 1771–1780. [Google Scholar] [CrossRef]
- Féki, N.; Clerc, G.; Velex, P. Gear and motor fault modeling and detection based on motor current analysis. Electr. Power Syst. Res. 2013, 95, 28–37. [Google Scholar] [CrossRef]
- Kaikaa, M.Y.; Hadjami, M.; Khezzar, A. Effects of the simultaneous presence of static eccentricity and broken rotor bars on the stator current of induction machine. IEEE Trans. Ind. Electron. 2014, 61, 2452–2463. [Google Scholar] [CrossRef]
- Ebrahimi, B.M.; Faiz, J. Configuration impacts on eccentricity fault detection in permanent magnet synchronous motors. IEEE Trans. Magn. 2012, 48, 903–906. [Google Scholar] [CrossRef]
- Ebrahimi, B.M.; Faiz, J.; Araabi, B.N. Pattern identification for eccentricity fault diagnosis in permanent magnet synchronous motors using stator current monitoring. IET Electr. Power Appl. 2010, 4, 418–430. [Google Scholar] [CrossRef]
- Ebrahimi, B.M.; Faiz, J. Diagnosis and performance analysis of three-phase permanent magnet synchronous motors with static, dynamic and mixed eccentricity. IET Electr. Power Appl. 2010, 4, 53–66. [Google Scholar] [CrossRef]
- Bruzzese, C.; Joksimovic, G. Harmonic signatures of static eccentricities in the stator voltages and in the rotor current of no-load salient-pole synchronous generators. IEEE Trans. Ind. Electron. 2011, 58, 1606–1624. [Google Scholar] [CrossRef]
- Faiz, J.; Ebrahimi, B.M.; Akin, B.; Toliyat, H.A. Comprehensive eccentricity fault diagnosis in induction motors using finite element method. IEEE Trans. Magn. 2009, 45, 1764–1767. [Google Scholar] [CrossRef]
- Li, X.; Wu, Q.; Nandi, S. Performance analysis of a three-phase induction machine with inclined static eccentricity. IEEE Trans. Ind. Appl. 2010, 43, 531–541. [Google Scholar] [CrossRef]
- Ojaghi, M.; Aghmasheh, R.; Sabouri, M. Model-based exact technique to identify type and degree of eccentricity faults in induction motors. IET Electr. Power Appl. 2016, 10, 706–713. [Google Scholar] [CrossRef]
- Faiz, J.; Ojaghi, M. Stator inductance fluctuation of induction motor as an eccentricity fault index. IEEE Trans. Magn. 2011, 47, 1775–1785. [Google Scholar] [CrossRef]
- Faiz, J.; Pakdelian, S. Diagnosis of static eccentricity in switched reluctance motors based on mutually induced voltages. IEEE Trans. Magn. 2008, 44, 2029–2034. [Google Scholar] [CrossRef]
- Lasjerdi, H.; Nasiri-Gheidari, Z.; Tootoonchian, F. Online Static/Dynamic Eccentricity Fault Diagnosis in Inverter-Driven Electrical Machines Using Resolver Signals. IEEE Trans. Energy Convers. 2020, 35, 1973–1980. [Google Scholar] [CrossRef]
- Cameron, J.R.; Thomson, W.T.; Dow, A.B. Vibration and current monitoring for detecting air-gap eccentricity in large induction motors. IEE Proc. B Electr. Power Appl. 1986, 133, 155–163. [Google Scholar] [CrossRef]
- Nandi, S.; Bharadwaj, R.M.; Toliyat, H.A. Performance analysis of a three-phase induction motor under mixed eccentricity condition. IEEE Trans. Energy Convers. 2002, 17, 392–399. [Google Scholar] [CrossRef]
- Nandi, S.; Ilamparithi, T.C.; Lee, S.B.; Hyun, D. Detection of eccentricity faults in induction machines based on nameplate parameters. IEEE Trans. Ind. Electron. 2011, 58, 1673–1683. [Google Scholar] [CrossRef]
- Ilamparithi, T.C.; Nandi, S. Identification of spectral components in the line current of eccentric salient pole machines using a binomial series-based inverse air-gap function. IET Electr. Power Appl. 2013, 7, 303–312. [Google Scholar] [CrossRef]
- Ilamparithi, T.C.; Nandi, S. Detection of eccentricity faults in three-phase reluctance synchronous motor. IEEE Trans. Ind. Appl. 2012, 48, 1307–1317. [Google Scholar] [CrossRef]
- Liu, Z.; Yin, X.; Zhang, Z.; Chen, D.; Chen, W. Online rotor mixed fault diagnosis based on spectrum analysis of instantaneous power in squirrel cage induction motors. IEEE Trans. Energy Convers. 2004, 19, 485–490. [Google Scholar] [CrossRef]
- Faiz, J.; Ojaghi, M. Instantaneous-power harmonics as indexes for mixed eccentricity fault in mains-fed and open/closed-loop drive-connected squirrel-cage induction motors. IEEE Trans. Ind. Electron. 2009, 56, 4718–4726. [Google Scholar] [CrossRef]
- Drif, M.; Cardoso, A.J.M. Air-gap-eccentricity fault diagnosis, in three-phase induction motors, by the complex apparent power signature analysis. IEEE Trans. Ind. Electron. 2008, 55, 1404–1410. [Google Scholar] [CrossRef]
- Faiz, J.; Moosavi, S.M.M. Detection of mixed eccentricity fault in doubly-fed induction generator based on reactive power spectrum. IET Electr. Power Appl. 2017, 11, 1076–1084. [Google Scholar] [CrossRef]
- Hu, N.Q.; Xia, L.R.; Gu, F.S.; Qin, G.J. A novel transform demodulation algorithm for motor incipient fault detection. IEEE Trans. Instrum. Meas. 2011, 60, 480–487. [Google Scholar] [CrossRef]
- Haddad, R.Z.; Lopez, C.A.; Foster, S.N.; Strangas, E.G. A voltage-based approach for fault detection and separation in permanent magnet synchronous machines. IEEE Trans. Ind. Appl. 2017, 53, 5305–5314. [Google Scholar] [CrossRef]
- Gyftakis, K.N.; Kappatou, J.C. A novel and effective method of static eccentricity diagnosis in three-phase PSH induction motors. IEEE Trans. Energy Convers. 2013, 28, 405–412. [Google Scholar] [CrossRef]
- Wu, L.; Lu, B.; Huang, X.; Habetler, G.; Harley, G. Improved online condition monitoring using static eccentricity-induced negative sequence current information in induction machines. In Proceedings of the 31st Annual Conference of IEEE Industrial Electronics Society, Raleigh, NC, USA, 6–10 November 2005; pp. 1737–1742. [Google Scholar]
- Bruzzese, C. Diagnosis of eccentric rotor in synchronous machines by analysis of split-phase currents—Part I: Theoretical analysis. IEEE Trans. Ind. Electron. 2014, 61, 4193–4205. [Google Scholar] [CrossRef]
- Bruzzese, C. Diagnosis of eccentric rotor in synchronous machines by analysis of split-phase currents—Part II: Experimental analysis. IEEE Trans. Ind. Electron. 2014, 61, 4206–4216. [Google Scholar] [CrossRef]
- Hyun, D.; Hong, J.; Lee, S.B.; Kim, K.; Wiedenbrug, E.J.; Teska, M.; Nandi, S.; Chelvan, I.T. Automated monitoring of air-gap eccentricity for inverter-fed induction motors under standstill conditions. IEEE Trans. Ind. Appl. 2011, 47, 1257–1266. [Google Scholar] [CrossRef]
- Hyun, D.; Lee, S.; Hong, J.; Lee, S.B.; Nandi, S. Detection of air-gap eccentricity for induction motors using the single-phase rotation test. IEEE Trans. Energy Convers. 2012, 27, 689–696. [Google Scholar] [CrossRef]
- Hong, J.; Hyun, D.; Lee, S.B.; Kral, C. Offline monitoring of air-gap eccentricity for inverter-fed induction motors based on the differential inductance. IEEE Trans. Ind. Appl. 2013, 49, 2533–2542. [Google Scholar] [CrossRef]
- Hong, J.; Lee, S.B.; Kral, C.; Haumer, A. Detection of air-gap eccentricity for permanent magnet synchronous motors based on the d-axis inductance. IEEE Trans. Power Electron. 2012, 27, 2605–2612. [Google Scholar] [CrossRef]
- Aggarwal, A.; Allafi, I.M.; Strangas, E.G.; Agapiou, J.S. Off-Line Detection of Static Eccentricity of PMSM Robust to Machine Operating Temperature and Rotor Position Misalignment Using Incremental Inductance Approach. IEEE Trans. Transp. Electrif. 2021, 7, 161–169. [Google Scholar] [CrossRef]
- Wolbank, T.M.; Macheiner, P.E. Monitoring of static and dynamic air gap eccentricity of inverter fed induction machine drives. IECON. In Proceedings of the 32nd Annual Conference of IEEE Industrial Electronics Society, Paris, France, 7–10 November 2006; pp. 1504–1509. [Google Scholar]
- Wolbank, T.M.; Macheiner, P.E. Modulation of transient reactances of induction machines caused by different types of eccentricity. In Proceedings of the 6th IEEE International Symposium on Diagnostics for Electrical Machines, Power Electronics and Drives, Cracow, Poland, 6–8 September 2007; pp. 89–94. [Google Scholar]
- Samonig, M.A.; Wolbank, T.M. Exploiting rotor slotting harmonics to determine and separate static and dynamic air-gap eccentricity in induction machines. In Proceedings of the 11th IEEE International Symposium on Diagnostics for Electrical Machines, Power Electronics and Drives, Tinos, Greece, 29 August–1 September 2017; pp. 52–57. [Google Scholar]
- Torkaman, H.; Afjei, E.; Yadegari, P. Static, dynamic, and mixed eccentricity faults diagnosis in switched reluctance motors using transient finite element method and experiments. IEEE Trans. Magn. 2012, 48, 2254–2264. [Google Scholar] [CrossRef]
- Torkaman, H.; Afjei, E. Sensorless Method for eccentricity fault monitoring and diagnosis in switched reluctance machines based on stator voltage signature. IEEE Trans. Magn. 2013, 49, 912–920. [Google Scholar] [CrossRef]
- Torkaman, H.; Afjei, E. Comprehensive detection of eccentricity fault in switched reluctance machines using high-frequency pulse injection. IEEE Trans. Power Electron. 2013, 28, 1382–1390. [Google Scholar] [CrossRef]
- Huang, X.; Habetler, T.G.; Harley, R.G.; Wiedenbrug, E.J. Using a surge tester to detect rotor eccentricity faults in induction motors. IEEE Trans. Ind. Appl. 2007, 43, 1183–1190. [Google Scholar] [CrossRef]
- Da, Y.; Shi, X.; Krishnamurthy, M. A new approach to fault diagnostics for permanent magnet synchronous machines using electromagnetic signature analysis. IEEE Trans. Power Electron. 2013, 28, 4104–4112. [Google Scholar] [CrossRef]
- Zeng, C.; Huang, S.; Lei, J.; Wan, Z.; Yang, Y. Online Rotor Fault Diagnosis of Permanent Magnet Synchronous Motors Based on Stator Tooth Flux. IEEE Trans. Ind. Appl. 2021, 57, 2366–2377. [Google Scholar] [CrossRef]
- Kang, K.; Song, J.; Kang, C.; Sung, S.; Jang, G. Real-time detection of the dynamic eccentricity in permanent-magnet synchronous motors by monitoring speed and back EMF induced in an additional winding. IEEE Trans. Ind. Electron. 2017, 64, 7191–7200. [Google Scholar] [CrossRef]
- Dorrell, D.G.; Salah, A. Detection of rotor eccentricity in wound rotor induction machines using pole-specific search coils. IEEE Trans. Magn. 2015, 51, 1–4. [Google Scholar] [CrossRef]
- Park, Y.; Fernandez, D.; Lee, S.B.; Hyun, D.; Jeong, M.; Kommuri, S.K.; Cho, C.; Reigosa, D.D.; Briz, F. Online Detection of Rotor Eccentricity and Demagnetization Faults in PMSMs Based on Hall-Effect Field Sensor Measurements. IEEE Trans. Ind. Appl. 2019, 55, 2499–2509. [Google Scholar] [CrossRef]
- Herman, J.; Begus, S.; Mihalic, P.; Bojkovski, J. Novel Method for Direct Measurement of Air Gap Anomalies in Direct-Drive Electrical Motors. IEEE Trans. Ind. Electron. 2020, 67, 2422–2429. [Google Scholar] [CrossRef]
- Capolino, G.; Romary, R.; Hénao, H.; Pusca, R. State of the Art on Stray Flux Analysis in Faulted Electrical Machines. In Proceedings of the IEEE Workshop on Electrical Machines Design, Control and Diagnosis, Athens, Greece, 22–23 April 2019; pp. 181–187. [Google Scholar]
- Lee, S.-B.; Shin, J.; Park, Y.; Kim, H.; Kim, J. Reliable Flux based Detection of Induction Motor Rotor Faults from the 5th Rotor Rotational Frequency Sideband. IEEE Trans. Ind. Electron. 2020, 68, 7874–7883. [Google Scholar] [CrossRef]
- Gyftakis, K.N.; Panagiotou, P.A.; Lee, S.B. Generation of Mechanical Frequency Related Harmonics in the Stray Flux Spectra of Induction Motors Suffering from Rotor Electrical Faults. IEEE Trans. Ind. Appl. 2020, 56, 4796–4803. [Google Scholar] [CrossRef]
- Ramirez-Nunez, J.A.; Antonino-Daviu, J.A.; Climente-Alarcón, V.; Quijano-López, A.; Razik, H.; Osornio-Rios, R.A.; Romero-Troncoso, R.D. Evaluation of the Detectability of Electromechanical Faults in Induction Motors Via Transient Analysis of the Stray Flux. IEEE Trans. Ind. Appl. 2018, 54, 4324–4332. [Google Scholar] [CrossRef]
- Vitek, O.; Janda, M.; Hajek, V.; Bauer, P. Detection of eccentricity and bearings fault using stray flux monitoring. In Proceedings of the 8th IEEE Symposium on Diagnostics for Electrical Machines, Power Electronics and Drives, Bologna, Italy, 5–8 September 2011; pp. 456–461. [Google Scholar]
- Ceban, A.; Pusca, R.; Romary, R. Study of rotor faults in induction motors using external magnetic field analysis. IEEE Trans. Ind. Electron. 2012, 59, 2082–2093. [Google Scholar] [CrossRef]
- Poncelas, O.; Rosero, J.A.; Cusido, J.; Ortega, J.A.; Romeral, L. Motor fault detection using a rogowski sensor without an integrator. IEEE Trans. Ind. Electron. 2009, 56, 4062–4070. [Google Scholar] [CrossRef] [Green Version]
- He, Y.; Zhang, Z.J.; Tao, W.Q.; Wang, X.L.; Gerada, D.; Gerada, C.; Gao, P. A New External Search Coil Based Method to Detect Detailed Static Air-Gap Eccentricity Position in Non-Salient Pole Synchronous Generators. IEEE Trans. Ind. Electron. 2020, 68, 7535–7544. [Google Scholar] [CrossRef]
- Kim, H. On-line mechanical unbalance estimation for permanent magnet synchronous machine drives. IET Electr. Power Appl. 2009, 3, 178–186. [Google Scholar] [CrossRef]
- Pilloni, A.; Pisano, A.; Usai, E.; Puche-Panadero, R. Detection of rotor broken bar and eccentricity faults in induction motors via second order sliding mode observer. In Proceedings of the 51st IEEE Conference on Decision and Control, Maui, HI, USA, 10–13 December 2012; pp. 7614–7619. [Google Scholar]
- Pons-Llinares, J.; Antonino-Daviu, J.A.; Riera-Guasp, M.; Pineda-Sanchez, M.; Climente-Alarcon, V. Induction motor diagnosis based on a transient current analytic wavelet transform via frequency B-splines. IEEE Trans. Ind. Electron. 2011, 58, 1530–1544. [Google Scholar] [CrossRef]
- Puche-Panadero, R.; Pineda-Sanchez, M.; Riera-Guasp, M.; Roger-Folch, J.; Hurtado-Perez, E.; Perez-Cruz, J. Improved resolution of the MCSA method via Hilbert transform, enabling the diagnosis of rotor asymmetries at very low slip. IEEE Trans. Energy Convers. 2009, 24, 52–59. [Google Scholar] [CrossRef]
- Pineda-Sanchez, M.; Puche-Panadero, R.; Riera-Guasp, M.; Perez-Cruz, J.; Roger-Folch, J.; Pons-Llinares, J.; Climente-Alarcon, V.; Antonino-Daviu, J.A. Application of the Teager–Kaiser energy operator to the fault diagnosis of induction motors. IEEE Trans. Energy Convers. 2013, 28, 1036–1044. [Google Scholar] [CrossRef]
- Choi, S.; Pazouki, E.; Baek, J.; Bahrami, H.R. Iterative condition monitoring and fault diagnosis scheme of electric motor for harsh industrial application. IEEE Trans. Ind. Electron. 2015, 62, 1760–1769. [Google Scholar] [CrossRef]
- Rajagopalan, S.; Aller, J.M.; Restrepo, J.A.; Habetler, T.G.; Harley, R.G. Detection of rotor faults in brushless DC motors operating under nonstationary conditions. IEEE Trans. Ind. Appl. 2006, 42, 1464–1477. [Google Scholar] [CrossRef] [Green Version]
- Riera-Guasp, M.; Pineda-Sanchez, M.; Perez-Cruz, J.; Puche-Panadero, R.; Roger-Folch, J.; Antonino-Daviu, J.A. Diagnosis of induction motor faults via Gabor analysis of the current in transient regime. IEEE Trans. Instrum. Meas. 2012, 61, 1583–1596. [Google Scholar] [CrossRef]
- Riera-Guasp, M.; Antonino-Daviu, J.A.; Pineda-Sanchez, M.; Puche-Panadero, R.; Pérez-Cruz, J. A general approach for the transient detection of slip-dependent fault components based on the discrete wavelet transform. IEEE Trans. Ind. Electron. 2008, 55, 4167–4180. [Google Scholar] [CrossRef]
- Antonino-Daviu, J.; Rodriguez, P.J.; Riera-Guasp, M.; Pineda-Sanchez, M.; Arkkio, A. Detection of combined faults in induction machines with stator parallel branches through the DWT of the startup current. Mech. Syst. Signal Process. 2009, 23, 2336–2351. [Google Scholar] [CrossRef]
- Rajagopalan, S.; Restrepo, J.A.; Aller, J.M.; Habetler, T.G.; Harley, R.G. Nonstationary motor fault detection using recent quadratic time–frequency representations. IEEE Trans. Ind. Appl. 2008, 44, 735–744. [Google Scholar] [CrossRef]
- Pons-Llinares, J.; Antonino-Daviu, J.A.; Riera-Guasp, M.; Bin Lee, S.; Kang, T.-J.; Yang, C. Advanced induction motor rotor fault diagnosis via continuous and discrete time–frequency tools. IEEE Trans. Ind. Electron. 2015, 62, 1791–1802. [Google Scholar] [CrossRef]
- Elbouchikhi, E.; Choqueuse, V.; Amirat, Y.; Benbouzid, M.E.; Turri, S. An Efficient Hilbert–Huang Transform-Based Bearing Faults Detection in Induction Machines. IEEE Trans. Energy Convers. 2017, 32, 401–413. [Google Scholar] [CrossRef]
- Fernandez-Cavero, V.; Morinigo-Sotelo, D.; Duque-Perez, O.; Pons-Llinares, J. A Comparison of Techniques for Fault Detection in Inverter-fed Induction Motors in Transient Regime. IEEE Access 2017, 5, 8048–8063. [Google Scholar] [CrossRef]
- Pons-Llinares, J.; Antonino-Daviu, J.; Roger-Folch, J.; Morinigo-Sotelo, D.; Duque-Perez, O. Mixed eccentricity diagnosis in Inverter-Fed Induction Motors via the Adaptive Slope Transform of transient stator currents. Mech. Syst. Signal Process. 2014, 48, 423–435. [Google Scholar] [CrossRef]
- Pons-Llinares, J.; Riera-Guasp, M.; Antonino-Daviu, J.A.; Habetler, T.G. Pursuing optimal electric machines transient diagnosis: The adaptive slope transform. Mech. Syst. Signal Process. 2016, 80, 553–569. [Google Scholar] [CrossRef]
- Climente-Alarcon, V.; Antonino-Daviu, J.A.; Riera-Guasp, M.; Puche-Panadero, R.; Escobar, L. Application of the Wigner–Ville distribution for the detection of rotor asymmetries and eccentricity through high-order harmonics. Electr. Power Syst. Res. 2012, 91, 28–36. [Google Scholar] [CrossRef]
- Climente-Alarcon, V.; Antonino-Daviu, J.A.; Riera-Guasp, M.; Vlcek, M. Induction motor diagnosis by advanced notch FIR filters and the Wigner–Ville distribution. IEEE Trans. Ind. Electron. 2014, 61, 4217–4227. [Google Scholar] [CrossRef] [Green Version]
- Pineda-Sanchez, M.; Riera-Guasp, M.; Roger-Folch, J.; Antonino-Daviu, J.A.; Perez-Cruz, J.; Puche-Panadero, R. Diagnosis of induction motor faults in time-varying conditions using the polynomial-phase transform of the current. IEEE Trans. Ind. Electron. 2011, 58, 1428–1439. [Google Scholar] [CrossRef] [Green Version]
- Akar, M. Detection of a static eccentricity fault in a closed loop driven induction motor by using the angular domain order tracking analysis method. Mech. Syst. Signal Process. 2013, 34, 173–182. [Google Scholar] [CrossRef]
- Borghesani, P.; Pennacchi, P.; Chatterton, S.; Ricci, R. The velocity synchronous discrete Fourier transform for order tracking in the field of rotating machinery. Mech. Syst. Signal Process. 2014, 44, 118–133. [Google Scholar] [CrossRef]
- Gong, X.; Qiao, W. Current-based eccentricity detection for direct-drive wind turbines via synchronous sampling. In Proceedings of the 2013 IEEE Energy Conversion Congress and Exposition, Denver, CO, USA, 15–19 September 2013; pp. 2972–2976. [Google Scholar]
- Gong, X.; Qiao, W. Current-based mechanical fault detection for direct-drive wind turbines via synchronous sampling and impulse detection. IEEE Trans. Ind. Electron. 2015, 62, 1693–1702. [Google Scholar] [CrossRef]
- Sapena-Bano, A.; Pineda-Sanchez, M.; Puche-Panadero, R.; Perez-Cruz, J.; Roger-Folch, J.; Riera-Guasp, M.; Martinez-Roman, J. Harmonic order tracking analysis: A novel method for fault diagnosis in induction machines. IEEE Trans. Energy Convers. 2015, 30, 833–841. [Google Scholar] [CrossRef] [Green Version]
- Sapena-Bano, A.; Riera-Guasp, M.; Puche-Panadero, R.; Martinez-Roman, J.; Perez-Cruz, J.; Pineda-Sanchez, M. Harmonic order tracking analysis: A speed-sensorless method for condition monitoring of wound rotor induction generators. IEEE Trans. Ind. Appl. 2016, 52, 4719–4729. [Google Scholar] [CrossRef]
- Luo, G.; Habetler, T.G.; Hurwitz, J. A Multi-sensor Fusion Scheme for Broken Rotor Bar and Air-gap Eccentricity Detection of Induction Machines. In Proceedings of the 2019 IEEE Energy Conversion Congress and Exposition, Baltimore, MD, USA, 29 September–3 October 2019; pp. 3905–3911. [Google Scholar]
- Haddad, R.Z.; Strangas, E.G. On the accuracy of fault detection and separation in permanent magnet synchronous machines using MCSA/MVSA and LDA. IEEE Trans. Energy Convers. 2016, 31, 924–934. [Google Scholar] [CrossRef]
- Seera, M.; Lim, C.P.; Ishak, D.; Singh, H. Fault detection and diagnosis of induction motors using motor current signature analysis and a hybrid FMM–CART model. IEEE Trans. Neural Netw. Learn. Syst. 2012, 23, 97–108. [Google Scholar] [CrossRef]
- Ebrahimi, B.M.; Roshtkhari, M.J.; Faiz, J.; Khatami, S.V. Advanced eccentricity fault recognition in permanent magnet synchronous motors using stator current signature analysis. IEEE Trans. Ind. Electron. 2014, 61, 2041–2052. [Google Scholar] [CrossRef]
- Biet, M. Rotor faults diagnosis using feature selection and nearest neighbors rule: Application to a turbogenerator. IEEE Trans. Ind. Electron. 2013, 60, 4063–4073. [Google Scholar] [CrossRef]
- Esfahani, E.T.; Wang, S.; Sundararajan, V. Multisensor wireless system for eccentricity and bearing fault detection in induction motors. IEEE/ASME Trans. Mechatron. 2014, 19, 818–826. [Google Scholar] [CrossRef]
- Lei, Y.; Jia, F.; Lin, J.; Xing, S.; Ding, S.X. An intelligent fault diagnosis method using unsupervised feature learning towards mechanical big data. IEEE Trans. Ind. Electron. 2016, 63, 3137–3147. [Google Scholar] [CrossRef]
- Kim, H.; Lee, S.B.; Park, S.; Kia, S.H.; Capolino, G.A. Reliable detection of rotor faults under the influence of low-frequency load torque oscillations for applications with speed reduction couplings. IEEE Trans. Ind. Appl. 2015, 52, 1460–1468. [Google Scholar] [CrossRef]
- Wu, L.; Huang, X.; Habetler, T.G.; Harley, R.G. Eliminating load oscillation effects for rotor eccentricity detection in closed-loop drive-connected induction motors. IEEE Trans. Power Electron. 2007, 22, 1543–1551. [Google Scholar] [CrossRef]
- Drif, M.H.; Cardoso, A.J. Marques Cardoso. Discriminating the Simultaneous Occurrence of Three-Phase Induction Motor Rotor Faults and Mechanical Load Oscillations by the Instantaneous Active and Reactive Power Media Signature Analyses. IEEE Trans. Ind. Electron. 2012, 59, 1630–1639. [Google Scholar] [CrossRef]
- Le Roux, W.; Harley, R.G.; Habetler, T.G. Detecting faults in rotors of PM drives. IEEE Ind. Appl. Mag. 2008, 14, 23–31. [Google Scholar] [CrossRef]
- Blodt, M.; Regnier, J.; Faucher, J. Distinguishing load torque oscillations and eccentricity faults in induction motors using stator current Wigner distributions. IEEE Trans. Ind. Appl. 2009, 45, 1991–2000. [Google Scholar] [CrossRef]
- Park, Y.; Yang, C.; Lee, S.-B.; Lee, D.-M.; Fernandez, D.; Reigosa, D.; Briz, F. Online Detection and Classification of Rotor and Load Defects in PMSMs Based on Hall Sensor Measurements. IEEE Trans. Ind. Appl. 2019, 55, 3803–3812. [Google Scholar] [CrossRef] [Green Version]
- Le Roux, W.; Harley, R.G.; Habetler, T.G. Detecting rotor faults in low power permanent magnet synchronous machines. IEEE Trans. Power Electron. 2007, 22, 322–328. [Google Scholar] [CrossRef]
- Rajagopalan, S.; le Roux, W.; Habetler, T.G.; Harley, R.G. Dynamic eccentricity and demagnetized rotor magnet detection in trapezoidal flux (brushless DC) motors operating under different load conditions. IEEE Trans. Power Electron. 2007, 22, 2061–2069. [Google Scholar] [CrossRef]
- Goktas, T.; Zafarani, M.; Akin, B. Discernment of broken magnet and static eccentricity faults in permanent magnet synchronous motors. IEEE Trans. Energy Convers. 2016, 31, 578–587. [Google Scholar] [CrossRef]
- Hong, J.; Park, S.; Hyun, D.; Kang, T.J.; Lee, S.B.; Kral, C.; Haumer, A. Detection and classification of rotor demagnetization and eccentricity faults for PM synchronous motors. IEEE Trans. Ind. Appl. 2012, 48, 923–932. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| FEM | Analytical Methods | MEC | MWFA | |
|---|---|---|---|---|
| Computation burden | High | Medium, | Medium | Low |
| Accuracy | High | Depends on model simplification assumptions | Depends on model simplification assumptions | Depends on model simplification assumptions |
| Can simulate ME | Yes | No | Yes | Yes |
| Provide analytical relations | No | Yes | Yes | Yes |
| Convenience in joint simulation with digital control and power electronics | Low | No | High | High |
| Comments | Good tool for fault diagnosis and validation of other modeling methods. | Good tool for computing cogging torque, field distribution and radial force. | Good tool for fault diagnosis | Good tool for fault diagnosis |
| Stationary Signal Processing | Nonstationary Signal Processing | |
|---|---|---|
| Representative methods | FFT, etc. | STFT, CWT, DWT, HHT, WVD, AST, etc. OT, PPT, etc. |
| Necessity of improvements for eccentricity | Low | High |
| Best suitable methods for eccentricity | FFT | STFT, AST OT |
| Representative form | Spectrum Stem plot | Time-frequency pattern Spectrum-like plot |
| Auxiliary Voltage Injection | Sensor-Based Detection | Coordinate Transform | |
|---|---|---|---|
| Principle | Inductances (or impedances) are modulated and distorted | Magnetic field distortion | Variation of components transform |
| Real-time capability | Offline [129] or real-time online [15] | Real-time online [74] | Real-time [60,61] or non-real-time online [57] |
| Pros | Small computation and low cost No additional hardware or FFT is required No winding structure modification is required | Simple principle and no interference Robust to operating conditions | No interference |
| Cons | The diagnostic condition is restricted to low speed or offload The operation is intermittently affected | Additional fabrication cost, and reliability issue | Additional computation [57], hardware or fabrication cost [60,61], and reliability issue |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Z.; Zhang, P.; He, S.; Huang, J. A Review of Modeling and Diagnostic Techniques for Eccentricity Fault in Electric Machines. Energies 2021, 14, 4296. https://doi.org/10.3390/en14144296
Liu Z, Zhang P, He S, Huang J. A Review of Modeling and Diagnostic Techniques for Eccentricity Fault in Electric Machines. Energies. 2021; 14(14):4296. https://doi.org/10.3390/en14144296
Chicago/Turabian StyleLiu, Zijian, Pinjia Zhang, Shan He, and Jin Huang. 2021. "A Review of Modeling and Diagnostic Techniques for Eccentricity Fault in Electric Machines" Energies 14, no. 14: 4296. https://doi.org/10.3390/en14144296