
Application of Modern Non-Linear Control Techniques for the Integration of Compressed Air Energy Storage with Medium and Low Voltage Grid

 , , ,
, , , 
Abstract
:1. Introduction
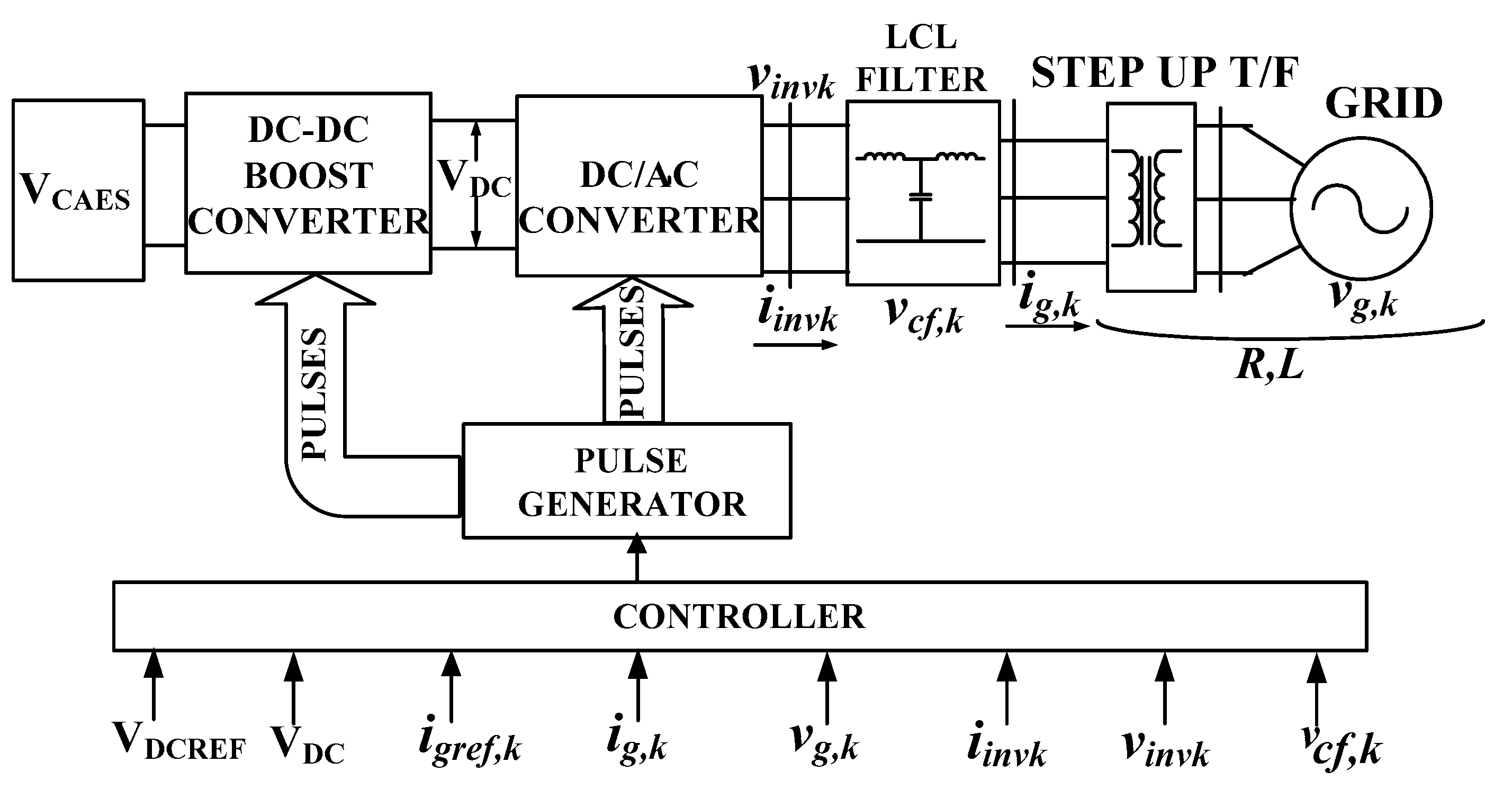
2. System Configuration
3. Compressed Air Energy Storage Details
4. Design of the System Controller
4.1. Control of DC Link Voltage
4.2. Control of Grid Side VSI
5. Simulation Results
5.1. DC Side Controller
5.2. Grid Side Controller
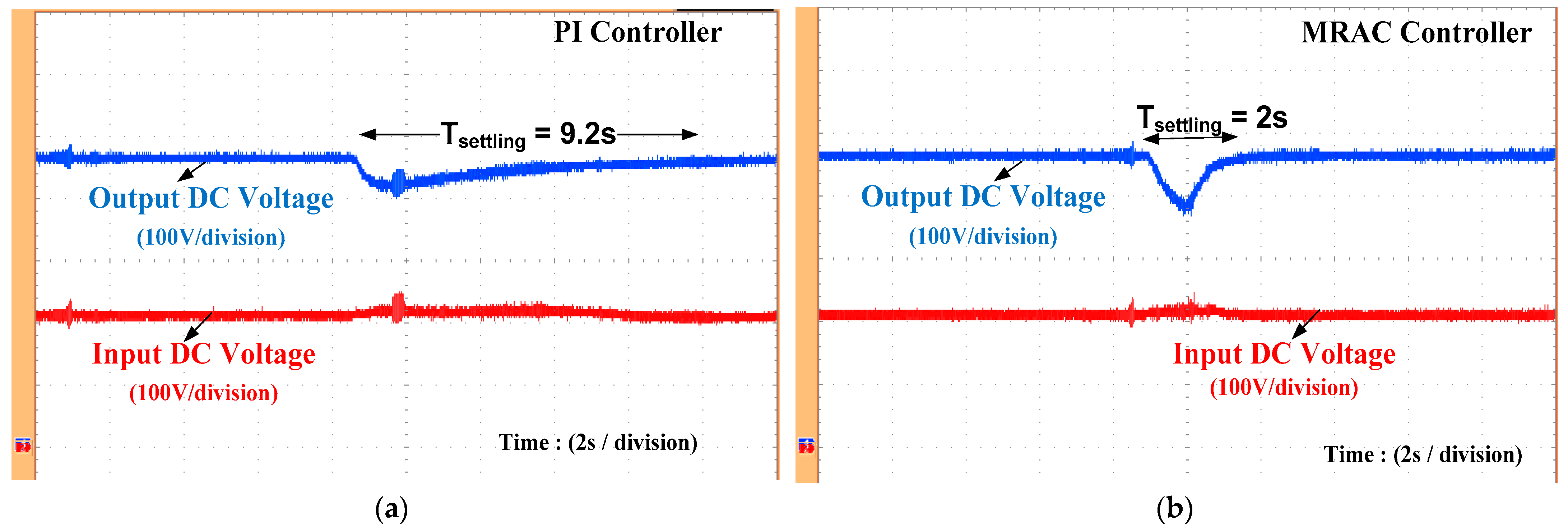
6. Experimental Results
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hansen, K.; Breyer, C.; Lund, H. Status and perspectives on 100% renewable energy systems. Energy 2019, 175, 471–480. [Google Scholar] [CrossRef]
- Pleßmann, G.; Erdmann, M.; Hlusiak, M.; Breyer, C. Global Energy Storage Demand for a 100% Renewable Electricity Supply. Energy Procedia 2014, 46, 22–31. [Google Scholar] [CrossRef] [Green Version]
- Bazilian, M.; Mai, T.; Baldwin, S.; Arent, D.; Miller, M.; Logan, J. Decision-making for High Renewable Electricity Futures in the United States. Energy Strat. Rev. 2014, 2, 326–328. [Google Scholar] [CrossRef]
- Lund, P.D.; Lindgren, J.; Mikkola, J.; Salpakari, J. Review of energy system flexibility measures to enable high levels of variable renewable electricity. Renew. Sustain. Energy Rev. 2015, 45, 785–807. [Google Scholar] [CrossRef] [Green Version]
- Brouwer, A.S.; van den Broek, M.; Seebregts, A.; Faaij, A. Impacts of large-scale Intermittent Renewable Energy Sources on electricity systems, and how these can be modeled. Renew. Sustain. Energy Rev. 2014, 33, 443–466. [Google Scholar] [CrossRef]
- Weitemeyer, S.; Kleinhans, D.; Vogt, T.; Agert, C. Integration of Renewable Energy Sources in future power systems: The role of storage. Renew. Energy 2015, 75, 14–20. [Google Scholar] [CrossRef] [Green Version]
- Hu, J.; Harmsen, R.; Crijns-Graus, W.; Worrell, E.; van den Broek, M. Identifying barriers to large-scale integration of variable renewable electricity into the electricity market: A literature review of market design. Renew. Sustain. Energy Rev. 2018, 81, 2181–2195. [Google Scholar] [CrossRef]
- Mears, D.; Gotschall, H.; Kamath, H. EPRI-DOE Handbook of Energy Storage for Transmission and Distribution Applications; EPRI: Palo Alto, CA, USA; The U.S. Department of Energy: Washington, DC, USA, 2003.
- Evans, A.; Strezov, V.; Evans, T.J. Assessment of utility energy storage options for increased renewable energy penetration. Renew. Sustain. Energy Rev. 2012, 16, 4141–4147. [Google Scholar] [CrossRef]
- Wang, J.; Lu, K.; Ma, L.; Wang, J.; Dooner, M.; Miao, S.; Li, J.; Wang, D. Overview of Compressed Air Energy Storage and Technology Development. Energies 2017, 10, 991. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Yang, L.; Luo, X.; Mangan, S.; Derby, J.W. Mathematical Modeling Study of Scroll Air Motors and Energy Efficiency Analysis—Part I. IEEE/ASME Trans. Mechatron. 2011, 16, 112–121. [Google Scholar] [CrossRef]
- Wang, J.; Luo, X.; Yang, L.; Shpanin, L.M.; Jia, N.; Mangan, S.; Derby, J.W. Mathematical Modeling Study of Scroll Air Motors and Energy Efficiency Analysis—Part II. IEEE/ASME Trans. Mechatron. 2009, 16, 122–132. [Google Scholar] [CrossRef]
- Luo, X.; Wang, J.; Dooner, M.; Clarke, J. Overview of current development in electrical energy storage technologies and the application potential in power system operation. Appl. Energy 2015, 137, 511–536. [Google Scholar] [CrossRef] [Green Version]
- Kim, Y.; Favrat, D. Energy and exergy analysis of a micro-compressed air energy storage and air cycle heating and cooling system. Energy 2010, 35, 213–220. [Google Scholar] [CrossRef] [Green Version]
- Tallini, A.; Vallati, A.; Cedola, L. Applications of Micro-CAES Systems: Energy and Economic Analysis. Energy Procedia 2015, 82, 797–804. [Google Scholar] [CrossRef] [Green Version]
- Todorovic, M.H.; Palma, L.; Enjeti, P.N. Design of a wide input range DC–DC converter with a robust power control scheme suitable for fuel cell power conversion. IEEE Trans. Ind. Electr. 2008, 55, 1247–1255. [Google Scholar] [CrossRef]
- Sira-Ramirez, H.; Rios-Bolívar, M. Sliding mode control of DC-to-DC power converters via extended linearization. IEEE Trans. Circuits Syst. 1994, 41, 652–661. [Google Scholar] [CrossRef]
- Hiti, S.; Borojevic, D. Robust nonlinear control for boost converter. IEEE Trans. Ind. Electr. 1995, 10, 651–658. [Google Scholar]
- Sun, L. Helicopter Hovering Control Design based on Model Reference Adaptive Method. In Proceedings of the 2019 IEEE 3rd Information Technology, Networking, Electronic and Automation Control Conference (ITNEC), Chengdu, China, 15–17 March 2019; pp. 1621–1624. [Google Scholar]
- Morse, W.D.; Ossman, K.A.; Ossman, A. Model following reconfigurable flight control system for the AFTI/F-16. J. Guid. Control. Dyn. 1990, 13, 969–976. [Google Scholar] [CrossRef]
- Bar-Kana, I.; Fischl, R. A Simple Adaptive Enhancer of Voltage Stability for Generator Excitation Control. In Proceedings of the 1992 American Control Conference, Chicago, IL, USA, 24–26 June 1992; pp. 1705–1709. [Google Scholar]
- Bar-Kana, I.; Guez, A. Simplified Techniques for Adaptive Control of Robotic. In Control and Dynamic Systems—Advances in Theory and Applications; Leondes, C., Ed.; Elsevier: Amsterdam, The Netherlands, 1991; Volume 41, pp. 147–203. [Google Scholar]
- Chen, J.; Wang, J.; Wang, W. Model Reference Adaptive Control for a Class of Aircraft with Actuator saturation. In Proceedings of the 2018 37th Chinese Control Conference (CCC), Wuhan, China, 25–27 July 2018; pp. 2705–2710. [Google Scholar]
- Kurniawan, E.; Widiyatmoko, B.; Bayuwati, D.; Afandi, M.I.; Suryadi; Rofianingrum, M.Y. Discrete-Time Design of Model Reference Learning Control System. In Proceedings of the 2019 24th International Conference on Methods and Models in Automation and Robotics (MMAR), Miedzyzdroje, Poland, 26–29 August 2019; pp. 337–341. [Google Scholar]
- Mizumoto, I.; Iwai, Z. Simplified adaptive model output following control for plants with unmodelled dynamics. Int. J. Control 1996, 64, 61–80. [Google Scholar] [CrossRef]
- Khajehoddin, S.A.; Karimi-Ghartemani, M.; Jain, P.K.; Bakhshai, A. A Control Design Approach for Three-Phase Grid-Connected Renewable Energy Resources. IEEE Trans. Sustain. Energy 2011, 2, 423–432. [Google Scholar] [CrossRef]
- Bao, X.; Zhuo, F.; Tian, Y.; Tan, P. Simplified Feedback Linearization Control of Three-phase Photo-voltaic Inverter with an LCL Filter. IEEE Trans. Power Electron. 2012, 28, 2739–2752. [Google Scholar] [CrossRef]
- He, N.; Xu, D.; Zhu, Y.; Zhang, J.; Shen, G.; Zhang, Y.; Ma, J.; Liu, C. Weighted Average Current Control in a Three-Phase Grid Inverter with an LCL Filter. IEEE Trans. Ind. Electron. 2012, 28, 2785–2797. [Google Scholar] [CrossRef]
- Mishra, S.; Sekhar, P.C. Sliding mode based feedback linearizing controller for a PV system to improve the performance under grid frequency variation. In Proceedings of the 2011 International Conference on Energy, Automation and Signal, Bhubaneswar, India, 28–30 December 2011; pp. 1–7. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| System Parameter | Value |
|---|---|
| Lf/2 | 1.64 mH, 7.2 A |
| Cf | 10 μF, 305 V |
| Cin | 470 μF, 400 V |
| L | 8.2 mH, 7.2 A |
| R | 82 Ω, 150 W |
| Transformer turns ratio | 110:230 |
| DC-link Voltage | 450 V |
| Grid Voltage | 230 V |
| Switching frequency | 5 kHz |
| Adaptation gain γ | 0.8 |
| Sliding mode gain ρ | 9 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mitra, S.K.; Karanki, S.B.; King, M.; Li, D.; Dooner, M.; Kiselychnyk, O.; Wang, J. Application of Modern Non-Linear Control Techniques for the Integration of Compressed Air Energy Storage with Medium and Low Voltage Grid. Energies 2021, 14, 4097. https://doi.org/10.3390/en14144097
Mitra SK, Karanki SB, King M, Li D, Dooner M, Kiselychnyk O, Wang J. Application of Modern Non-Linear Control Techniques for the Integration of Compressed Air Energy Storage with Medium and Low Voltage Grid. Energies. 2021; 14(14):4097. https://doi.org/10.3390/en14144097
Chicago/Turabian StyleMitra, Sanjib Kumar, Srinivas Bhaskar Karanki, Marcus King, Decai Li, Mark Dooner, Oleh Kiselychnyk, and Jihong Wang. 2021. "Application of Modern Non-Linear Control Techniques for the Integration of Compressed Air Energy Storage with Medium and Low Voltage Grid" Energies 14, no. 14: 4097. https://doi.org/10.3390/en14144097