1. Introduction
Integrating photovoltaic (PV) energy into the low-voltage distribution system increases network voltage stability issues. With the help of fast communication and smart meters, the smart grid and microgrid can solve distribution network problems through centralized and decentralized controls [
1,
2]. The increased number of PV systems installed in residential areas can cause reverse power flow when the solar power is higher than the load power. The reverse power flow to the grid causes the voltage in the bus to rise and this is one of the main reasons for the curtailment of PV production [
3]. The voltage values in the network should be kept within the statutory limit of 10% higher than the rated value [
4]. To reduce the voltage, PV inverters can support a certain amount of reactive power and curtailment of active power through droop control [
5,
6,
7,
8,
9,
10]. Other research studies use optimization methods to avoid overvoltage by calculating the optimal reactive power of PV inverters [
11,
12]. There are papers applying multi-objective optimal algorithms for obtaining the maximum active power generation and reactive power consumption of the PV inverter with overvoltage control [
13,
14,
15,
16]. These control strategies consider the amount of PV reactive power from zero up to the inverter power capacity where the power factor of the PV inverters can be from 0 to 1. However, many conventional PV inverters have a smaller adjustable range, such as from 0.8 to 1 [
17,
18,
19,
20]. Therefore, the amount of reactive power from the PV inverters is smaller than those PV inverters with a power factor range of 0 to 1. This leads to more curtailment of PV active power in the case of overvoltage.
A requirement when considering control methods for the smart grid and microgrid is that sufficient information is available for all devices in the network. The optimization controls in [
11,
12,
13,
14,
15,
16] show the results of a network where all PV inverters are controllable. However, in a hybrid network with PV inverters running autonomously and smart PV inverters under central control, the optimization algorithms of the central network controller as in [
11,
12,
13,
14,
15,
16] cannot be performed.
The time to compute an optimal solution for the decentralized controller and the dynamic of the network must also be considered. The state of a network changes every second due to changing solar irradiation and variable residential loads connected to the network. However, there are time lags in the communication between the devices in the network and the central controller and in computing an optimal operating point. Depending on the complexity of the optimization algorithm and the processing power of the computer, the controller may take longer than a second to find an optimal solution. Thus, the time for the controller to give optimal commands to the PV inverters may be longer than the time in which the network changes state.
The state of a network is predicted for the optimization calculation. Previous research forecast the solar profile [
21,
22,
23] for a period of hours or days ahead or for load and solar profiles in the short term, of 15 min [
24,
25]. In this paper, a simple prediction method is applied for 1 min ahead based on a historical database of 1 h. For a short time prediction, of 1 min, the method has shown its effectiveness in predicting solar and load profiles for the optimization control.
Microgrid communication delay is one of the key challenges to achieving optimal control. The researchers in [
26] proposed a maximal delay margin to mitigate the effect of communication delays. In this paper, a different time scale of the PV inverter operation time and the controller computing period is proposed to address the effect of a communication delay.
There is previous research on both the optimization and prediction of PV inverters in microgrids [
27,
28,
29]. However, these research works focused on the optimization of active power production and cost. The investigation of combined optimization with prediction and overvoltage with PV reactive power support is less considered. In the proposed control method, the PV inverters control both active and reactive power by applying multi-objective optimization and prediction.
The prediction may be incorrect due to the uncertainty and stochastic behavior of the load profile or solar irradiation. A vulnerability assessment method for interruptible load employing weights of vulnerability indexes has been proposed [
30]. In this paper, a simple method using a voltage gap and delay filter is applied to cope with a quick state change and prediction error.
The paper proposes a comprehensive optimal control of smart PV inverters in cluster microgrids in a non-ideal condition of incomplete information and communication delay. The stability and robustness of the proposed control algorithm are proved in different scenarios of both controllable PV inverters and a mix of autonomous and controllable PV inverters.
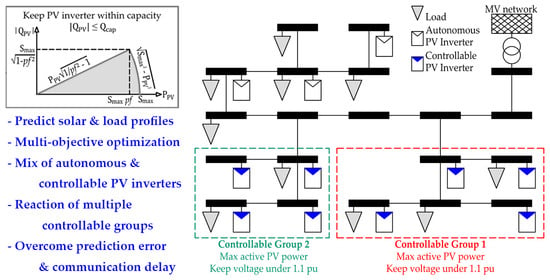
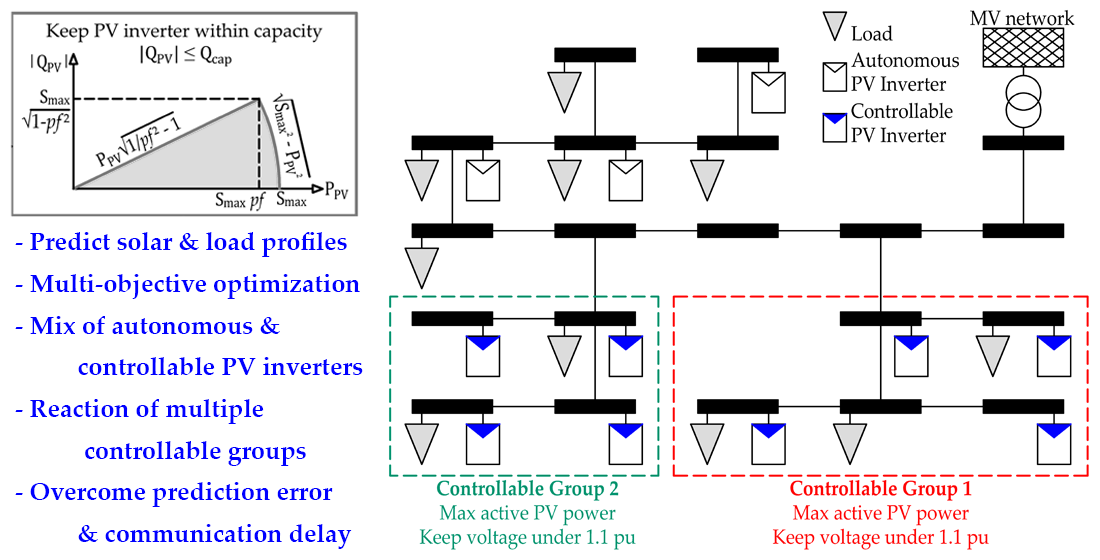
In this paper, an autonomous droop control (ADC) and decentralized optimal control (DOC) are designed for the PV inverters to solve all the problems outlined above. Both control algorithms are designed to always keep the network voltage under the specified value. The limited adjustable range of PV power factor is also taken into account in the control strategies. Based on the voltage, each PV inverter is switched between the ADC and DOC control modes. The DOC can be applied to different independent groups of controllable PV inverters inside a distribution network with a mix of both autonomous and controllable PV inverters. The network interaction of multiple DOC groups is also considered in this study. Moreover, the ADC and DOC control strategies perform their control in different time scales to account for communication and computation time delay while ensuring effective voltage management.
The simulation of the network has been built for verification purposes. The simulation was designed to replicate a practical system with a benchmarked network and a measured solar profile.
3. Decentralized Optimal Control (DOC)
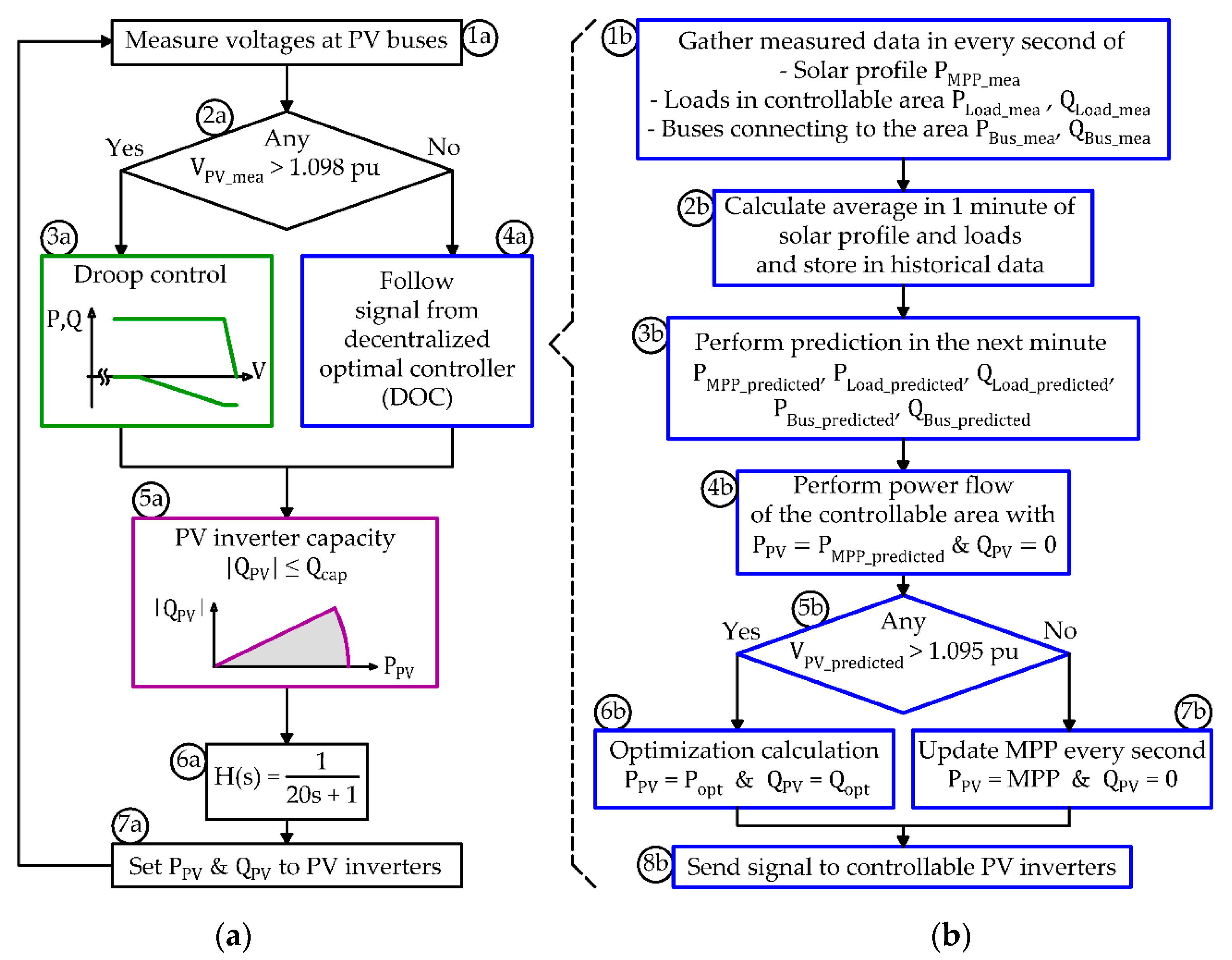
The DOC in
Figure 2b is the control algorithm that sends commands to a group of smart PV inverters in a certain area. This control calculates both active and reactive power of PV inverters so all inverters work cooperatively to meet all safety requirements with optimum performance. To do this, a power flow analysis is applied to calculate the network voltage for a range of possible PV output power values. Therefore, knowing the network state, such as power absorbed or delivered to the controllable area, is one of the initial steps.
There are not only PV inverters but also existing loads in the network. Knowledge of the power of all components is necessary for power flow analysis. Hence, measurement of all components such as power and voltage values should be collected for the DOC. Moreover, the time lag resulting from communication delays and the large number of calculations required to determine the DOC setpoints limits the operational frequency of the central controller. In this work, the commands from the DOC are sent to PV inverters every minute.
To determine the setpoint values for PV inverters in the next minute, the control should estimate the state of the network in that next minute by a prediction method. As seen in blocks 2b and 3b of
Figure 2b, the prediction is done before the power flow analysis in block 4b. More details of the prediction mechanism are described in
Section 3.1.
In block 4b, the Newton-Raphson power flow method [
32] is applied to calculate the voltage of PV buses in the next minute based on the predicted values in block 3b. The state of the network is considered in the worst-case scenario of maximum PV active power (
) and zero reactive power (
). The reactive power from the PV inverters can affect the inverter lifetime and cost [
33] so that a zero reactive power is applied.
To save unnecessary calculation, after the power flow analysis, the optimization is only performed when any node voltage exceeds 1.095 pu, as shown in block 5b. When all predicted voltage values are under 1.095 pu, the DOC only commands the PV inverters to run the MPP with the unity power factor, as seen in block 7b.
The optimization in block 6b is updated every minute and it is used to maximize the active power of all PV inverters in the controllable group while keeping the inverters within limits of the power factor () and power capacity ().
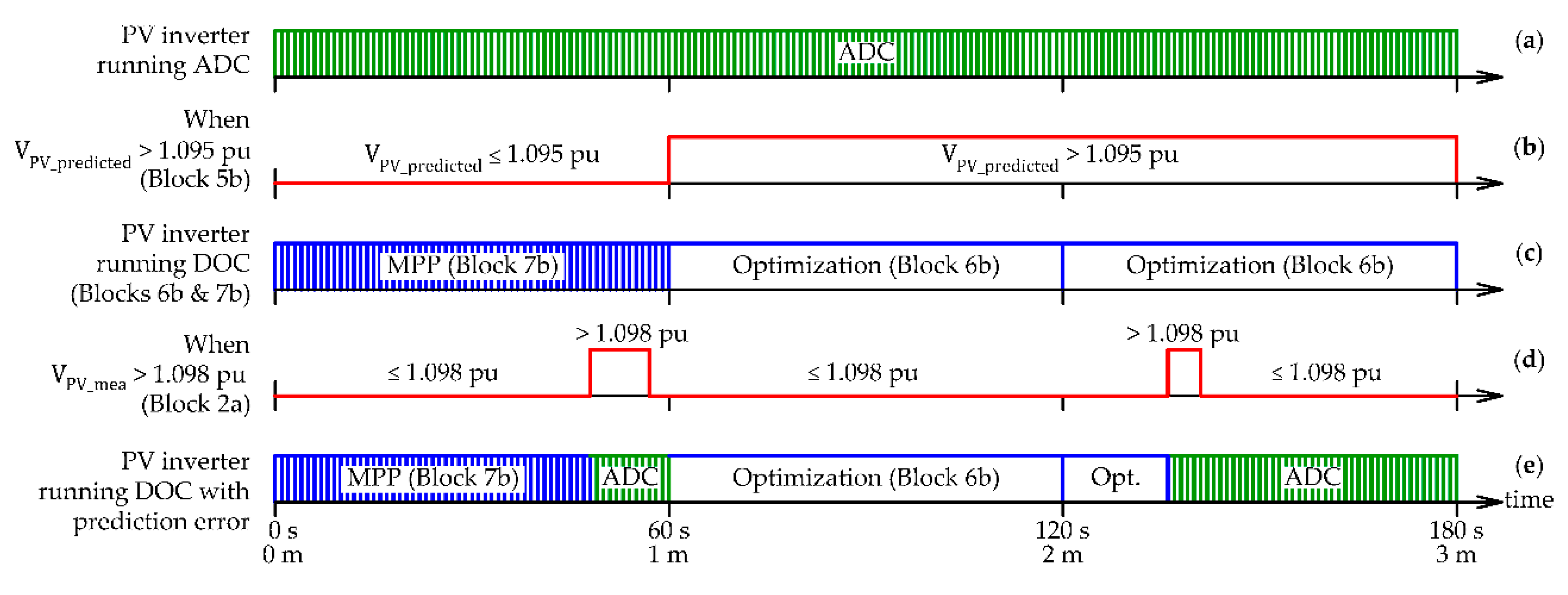
The different control time scales are illustrated in
Figure 3. In this figure, a section of 180 s or 3 min is shown. In
Figure 3a, the ADC is updated every second, i.e., it is running 180 times within 3 min.
The illustration of blocks 5b, 6b and 7b of
Figure 2b is shown in
Figure 3b,c. When all predicted voltage values are under 1.095 pu, the DOC just commands the PV inverters to run the MPP every second. When the predicted voltage is higher than 1.095 pu, the optimization is applied. The optimization is calculated and the DOC command remains unchanged for every minute. As seen in
Figure 3b, the predicted power flow voltage shows that the voltage value will be higher than 1.095 pu in the second and third minutes, and thus, optimization (block 6b) is applied during these two minutes.
The prediction model can output inaccurate values due to many factors, such as a sudden change of solar irradiation, random behavior of the load profile, network problems or missing communication. A low level of prediction error is acceptable as the control algorithm includes a voltage gap between 1.095 pu to 1.098 pu for small fluctuations of the solar or load profile. However, when the measured voltage is over the threshold of 1.098 pu (block 2a of
Figure 2a), the DOC commands to the PV inverters must be overridden and the PV inverters switch to the failsafe autonomous mode of ADC. The illustration of SIC when there are prediction inaccuracies is shown in
Figure 3d,e. In this situation, the measured PV voltage
is larger than 1.098 pu at the first and third minutes. The ADC will override the DOC from the time of the interruption until the next minute. This is to avoid the hunting effect of switching back and forth between the ADC and the DOC. As seen in
Figure 3e, the PV inverter switches to ADC mode when the measured voltage is larger than 1.098 pu and it keeps running the ADC until the end of a minute.
The description detailing the mechanism of the prediction calculation and optimization is presented in
Section 3.1 and
Section 3.2.
3.1. Prediction
There are many typical time series forecasting methods, such as Autoregression (AR), Moving Average (MA), Autoregressive Moving Average (ARMA), Autoregressive Integrated Moving Average (ARIMA), Regression Model with ARIMA Error, Vector Autoregression (VAR), Generalized Autoregressive Conditionally Heteroscedastic model (GARCH), Seasonal Autoregressive Integrated Moving-Average (SARIMA) and Seasonal Autoregressive Integrated Moving Average with Exogenous Regressors (SARIMAX) [
34]. These methods can be applied to predict more than one point ahead. In this paper, one point ahead is sufficient for the next step of the optimization calculation. Therefore, the AR forecasting method was chosen for its simplicity.
The AR model calculates the predicted value
based on previous values. The
th-order autoregression model, written as AR(
), is a multiple linear regression where the predicted value of the series
is a function of
,
, …,
. In this research, the MATLAB
arcov function [
35] is used to fit an AR(
) model to the input signal by the covariance method. This function calculates coefficients
,
, …,
from the input signal of
points
,
, …,
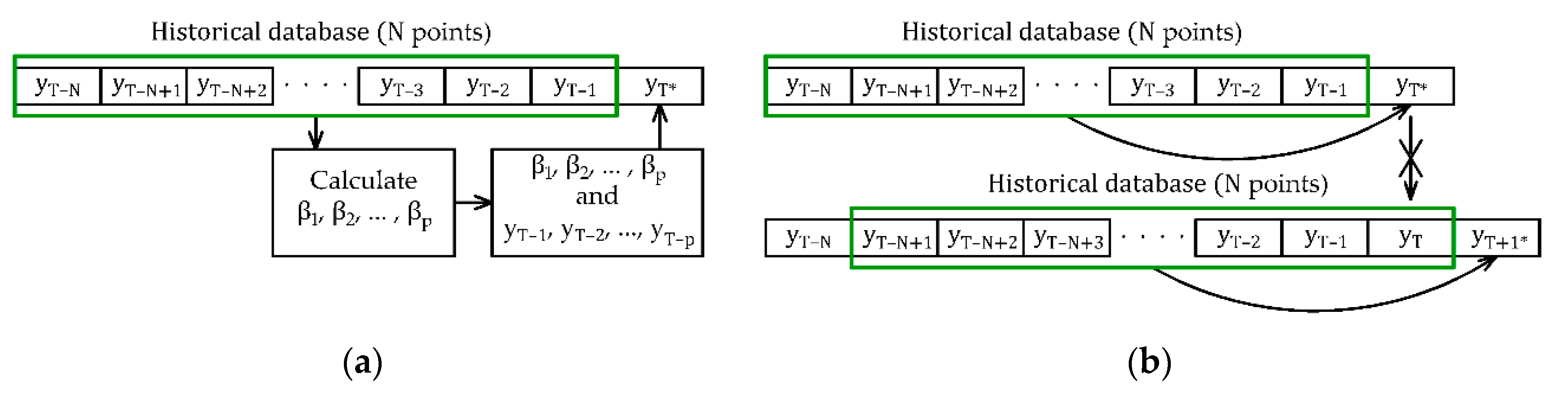
, as seen in
Figure 4a.
The predicted value
is calculated from previous values
,
, …,
and calculated coefficients
,
, …,
, as in Equation (2). It is noted in Equation (2) that the predicted value
is determined only from
values of
,
, …,
, but the coefficients
,
, …,
are calculated from
values of
,
, …,
. The larger the value of
, the more accurate the values of coefficients
,
, …,
.
The prediction value may be incorrect or too far away from the real value so that there is a limit to the predicted value
to be in the range of ±50% and has the same sign as the previously measured value
. When the predicted value is outside the range or has the opposite sign, it will be set to be the same as the previously measured value as in Equation (3):
The historical database for the prediction is a fixed
point, and the database is updated before any new prediction, as seen in
Figure 4b. In addition, all
values stored in the database are measured values from which the predicted point (only one point) is always calculated. As seen in
Figure 4b, the predicted value
is not included in the database of the next prediction. The database is updated with the addition of the measured or actual value of
and the removal of
. Additionally, the coefficients of
,
, …,
are updated from the new database for the next prediction.
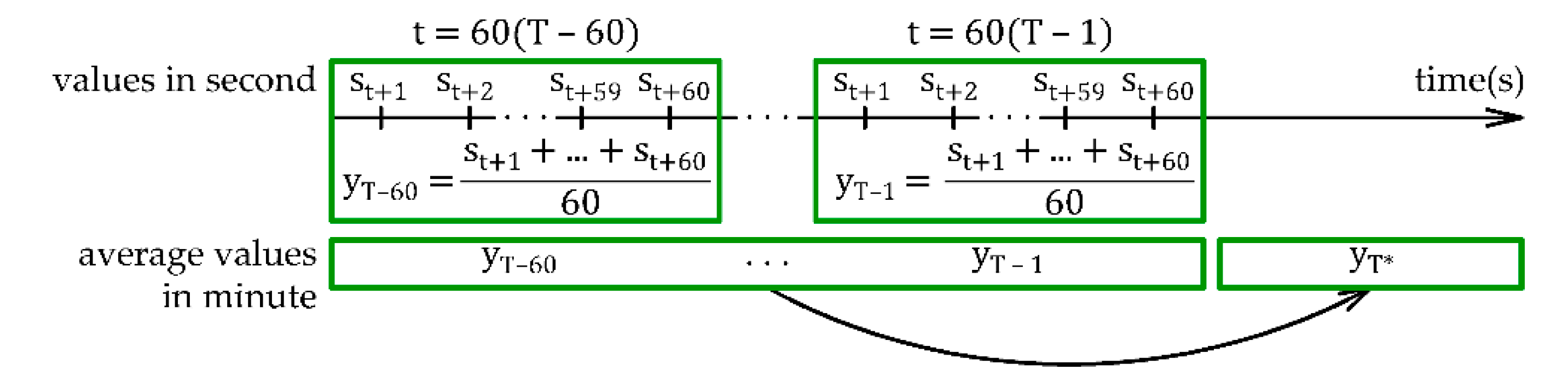
In this paper, the third-order autoregression, or AR(3), is selected. A database section of 60 points is chosen (
). As seen in Equation (2), the predicted value
is determined from three previous values of
,
and
. The three coefficients
,
and
are calculated from 60 values of
, …,
. In this paper, the new data are updated every minute and taken from an average of 60 s, as shown in
Figure 5.
Figure 5 illustrates the mechanism of the first three blocks in
Figure 2b (blocks 1b, 2b and 3b). Network values are measured every second as
,
, …,
over one minute (block 1b); then, the value of every minute (
, …,
) is calculated by taking the average of 60 one-second measured values (block 2b). After that, the value in the next minute
is calculated from the 60 average minute values (
, …,
). This means that the predicted values are calculated from data of 3600 s or 1 h.
The next step of the smart inverter control is the optimization calculation.
3.2. Optimization
The calculation burden for the DOC is reduced by only applying the optimization process when the maximum voltage calculated from the power flow analysis is higher than 1.095 pu, as seen in blocks 5b and 6b of
Figure 2b. To calculate the multi-objective optimization, the MATLAB function
fmincon [
36] is used. This function determines optimal values of a cost function with boundaries, equality, linear inequality and non-linear inequality constraints and is, therefore, suitable for this research.
The goal of the optimization is to maximize the active power of
inverters while keeping all node voltages under 1.095 pu. The PV inverters can consume a certain amount of reactive power (
) to help reduce the bus voltage if required. The objective function is shown in Equation (4). The power
and
are the variables to be determined by the optimization so that there are a total of 2
variables:
Any PV inverter
has its upper and lower boundaries for active and reactive power, shown in Equations (5) and (6), respectively. Active power delivered from the PV inverter is positive and limited to the power available at the MPP, while the reactive power consumed by the inverter is negative. Note that the MPP used in the optimization is the predicted value. The lower limit of
also depends on the MPP and has one of two possible values. These values relate to the linear and non-linear operating regions when
is less or greater than
, as in Equation (6). In the non-linear region, the lower limit of
is set to be fixed and does not depend on
:
Ensuring that the power factor of each PV inverter is within the limit introduces the linear inequality constraint shown in Equation (7). The value of
is set to be within the power factor constraint of the PV inverter relative to
:
Nonlinear inequality constraints are shown in Equations (8) and (9). The voltage at all nodes in Equation (8) is a function of
and
. The voltage value is calculated through the Newton-Raphson power flow method [
32] and must remain within network limits. The voltage limit is chosen to be 1.095 pu, the same as the value in block 5b of
Figure 2b. The inverter capacity is limited by Equation (9):
The starting points of the active and reactive power variables are shown in Equation (10). The active power equals the maximum possible MPP values; the reactive power starts from zero:
The reason for setting the voltage limit to 1.095 pu instead of 1.1 pu is that the optimization calculation is based on the predicted values and the results may be incorrect. There is a range from 1.098 to 1.1 pu in which the inverter power is limited by the droop control. In this way, if there is any decentralized controller prediction or calculation error, the voltage is always kept under the upper limit.
The control theories presented above are coded in the simulation environment to assess the potential of the different control strategies.
5. Result Summary and Discussion
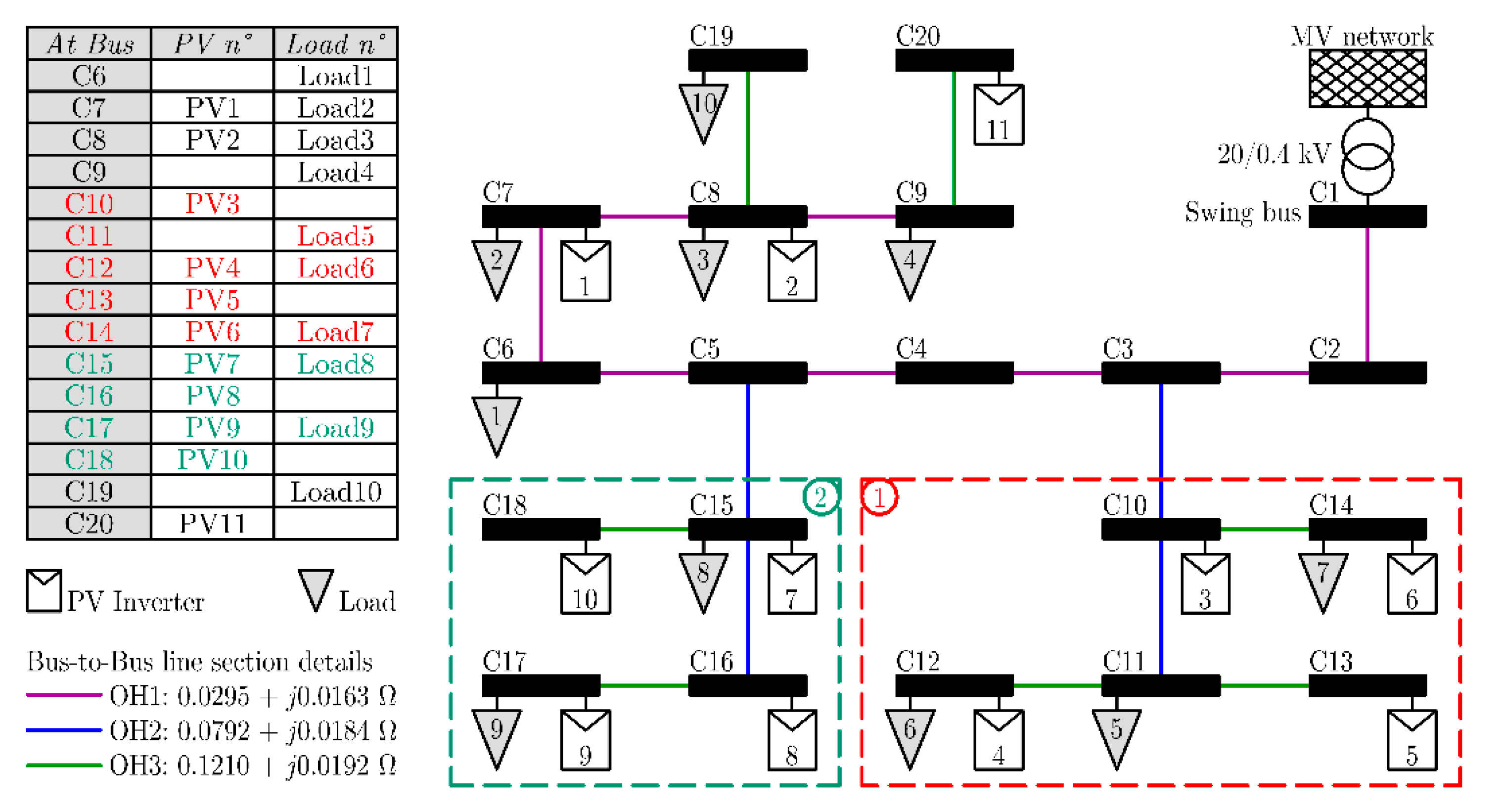
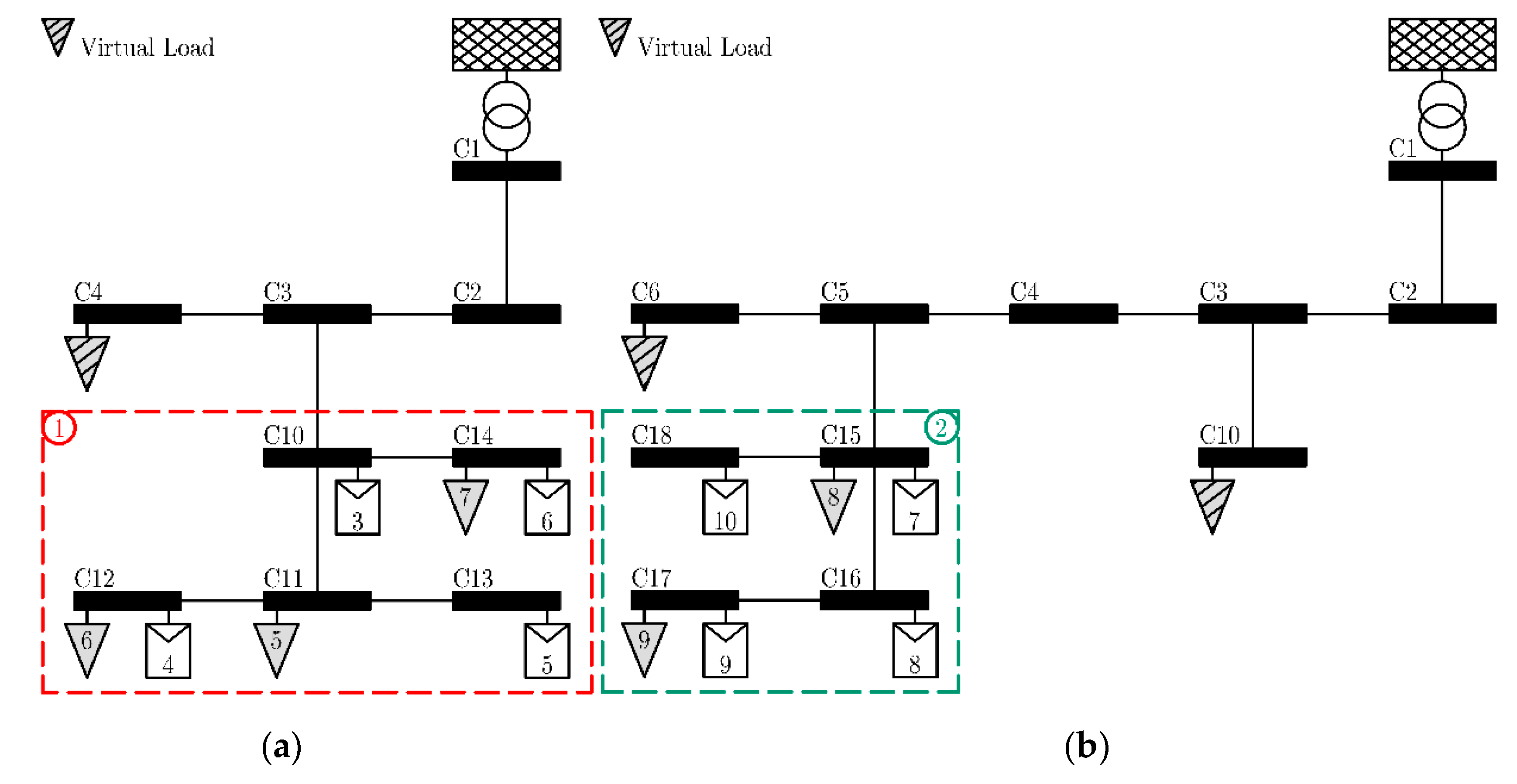
This paper has presented complete control strategies for PV inverters. The network responses with different control groups were realized in the simulation results. The DOC is improved by making the power flow analysis possible for a small area inside a larger network, as seen in
Figure 8 by virtual loads and prediction. The switching between the DOC and ADC is also a contribution to robustly keep the network in a stable state even in the event of incorrect commands from the DOC.
The control mechanism of the ADC partially acts as an optimization method. As seen in block 2 of
Figure 1, the higher the voltage, the lower the active power and the higher the reactive power. The reverse power flow causes the voltage of PV buses at the termination buses of the network to have the highest value. With the ADC, the power delivered at these buses has the most curtailment, and the reactive power has the most consumption. This leads to higher power production for PV inverters at the other buses in the network. The ADC in this research has shown its effectiveness of voltage limiting without any outer controller. The ADC also considers the power factor limit of each PV inverter.
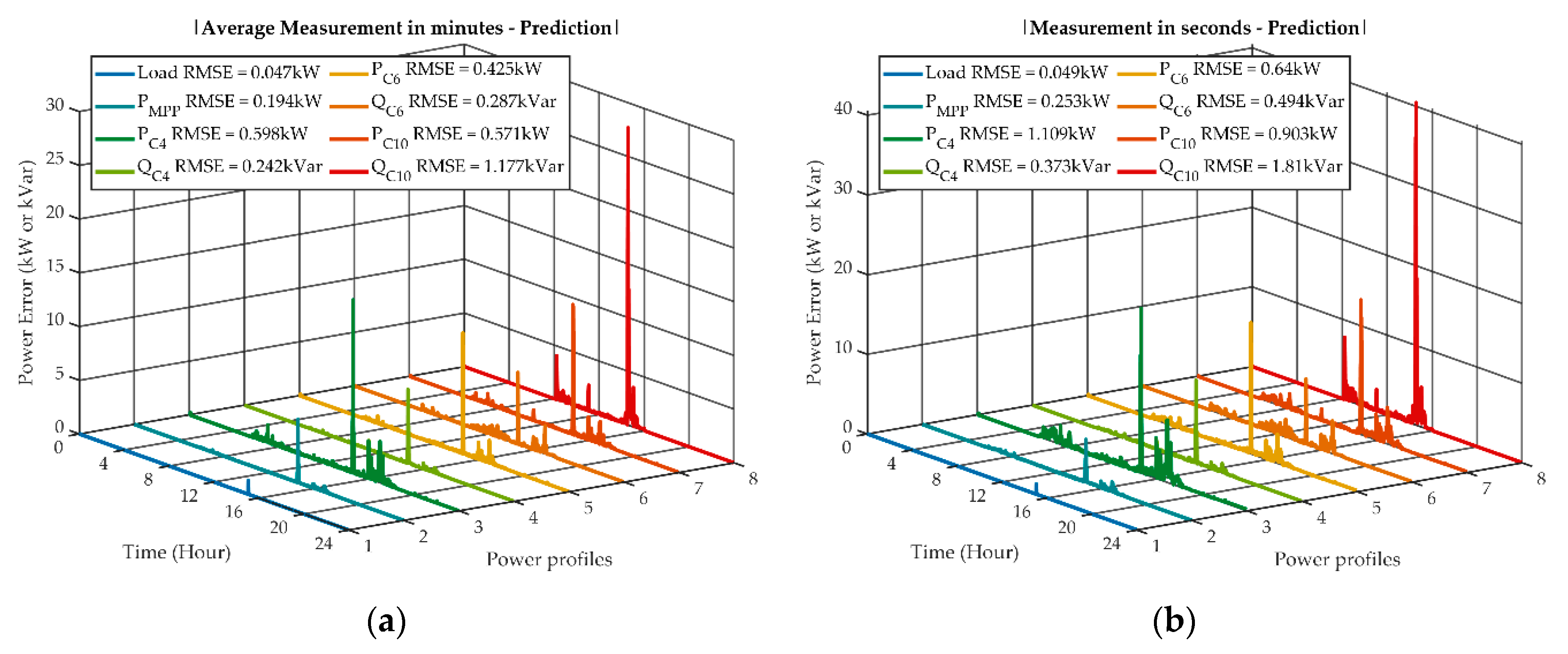
The AR prediction model is one of the key factors to make optimization possible. To calculate the accuracy of the prediction, the root-mean-square error (RMSE) [
39] between the actual profile and the prediction is calculated with Equation (11):
The RMSE values and absolute errors of the prediction and power profiles of load profile, MPP profile and virtual loads for Case 4 are shown in
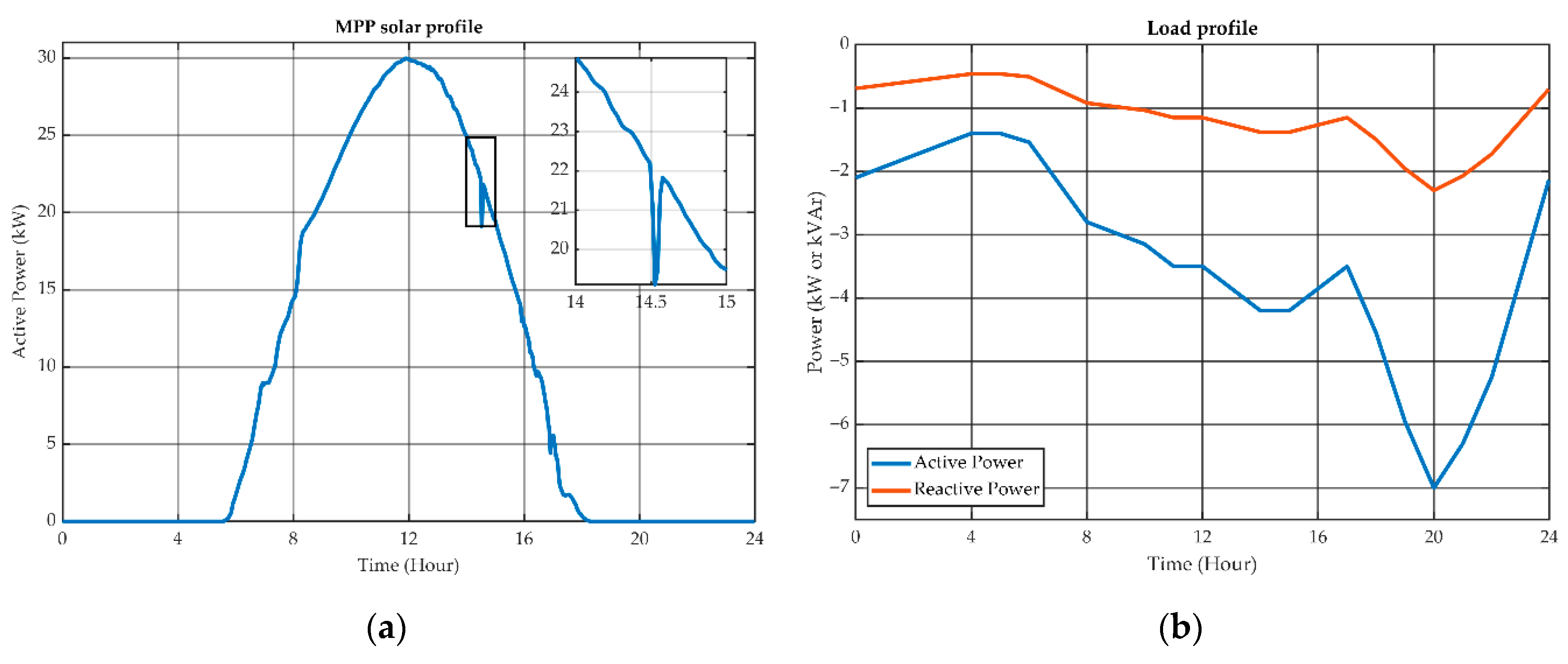
Figure 15. The reactive power of the load profile has the same shape as the active power shown in
Figure 7b, so that only load active power
is shown. For the virtual loads, the prediction is shown for both the active and reactive power.
The differences between the prediction and the average values for every minute are shown in
Figure 15a. The error for the load and MPP profile is low with a few spikes. As seen in
Figure 7a, there is a small drop of solar power at around 2:32 pm, causing an error spike in the prediction. The errors for virtual loads are higher than the load and MPP profile, but the differences are small, with the highest RMSE of 1.177 kVar.
The absolute errors between the actual load profiles in every second and the prediction are shown in
Figure 15b. As mention before, the prediction is determined for every minute and shows the tendency of the values in the next 60 s. During a period of 60 s, there are changes in the power values; thus, there are more errors in
Figure 15b in comparison to
Figure 15a.
The prediction described in block 3b of
Figure 2b operates whenever there is PV power available and the optimization calculation (block 6b of
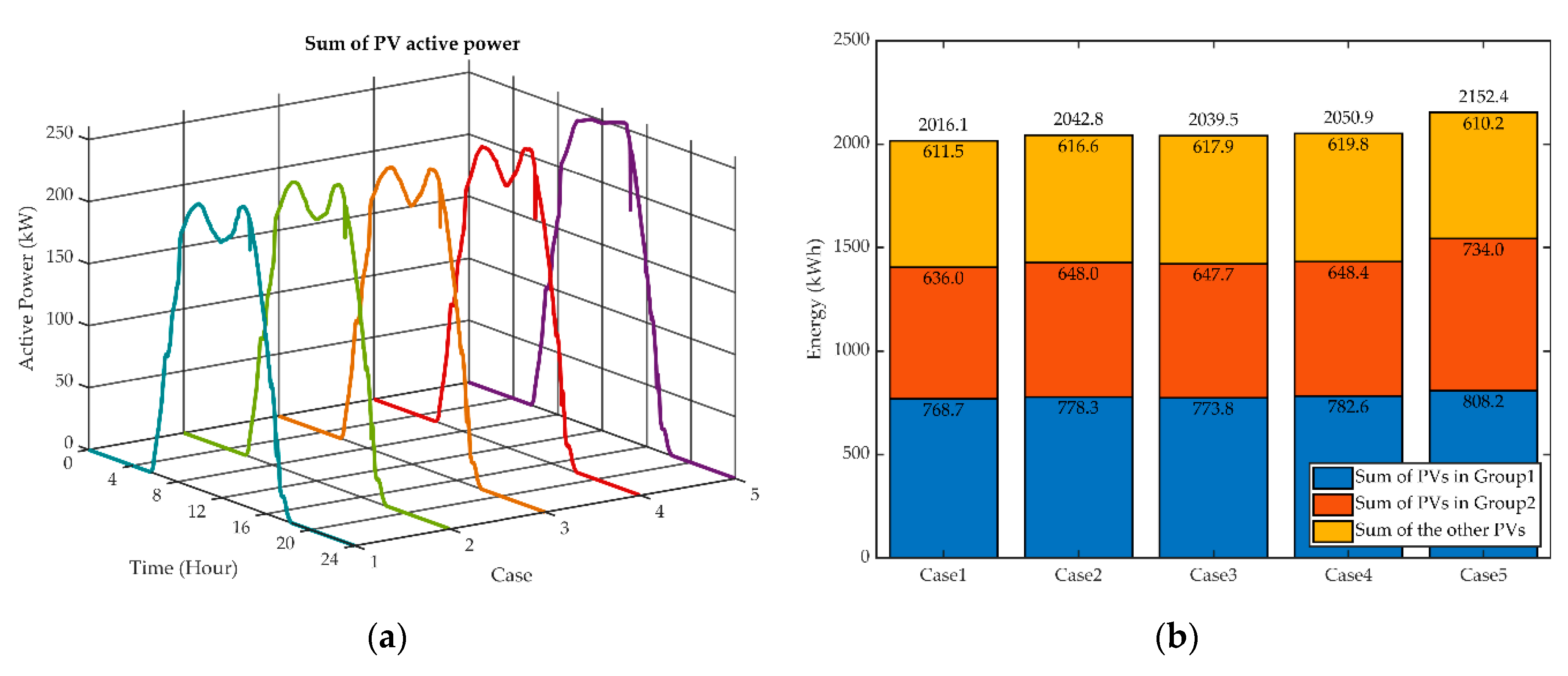
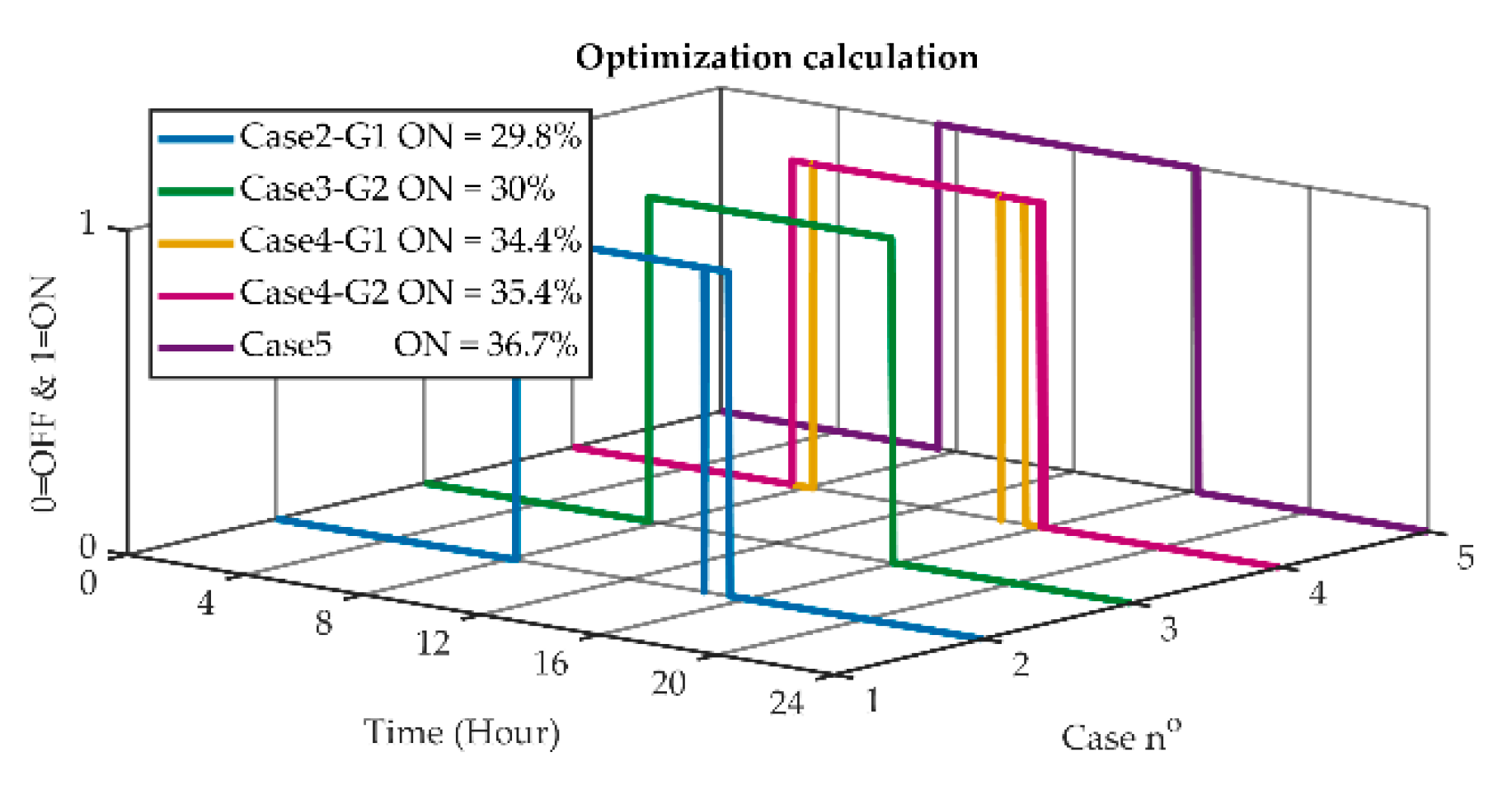
Figure 2b) is only utilized when the predicted power flow voltage is larger than 1.095 pu. The results of the simulation show that the optimization calculation is only applied at peak time when the solar irradiation is high. In the simulation, the optimization operates for about 35% of the time in a day, as seen in
Figure 16. The simulation of Case 1 is the ADC so that the optimization is not applied. Case 4 has two DOCs operating separately, so that there are two lines of optimization calculation for Group 1 and Group 2 in
Figure 16. The optimal controller does not need to run all the time to reduce the power consumption of the controller.
In
Figure 16, the optimization calculation in Case 4 of Group 2 is applied for a longer time than Group 1, because the PV inverters in Group 2 are located further from the swing bus than those in Group 1. The reverse power flow causes the voltage levels in Group 2 to be higher than those in Group 1, so that Group 2 has to operate more calculations than Group 1.
The analysis of
Figure 16 indicates that there is a short time at around 2:32 pm when the optimization does not operate (the PV inverters operate as in block 7b of
Figure 2b instead), as seen in Case 2 and Group 1 of Case 4. The sudden drop in solar irradiation highlighted in
Figure 7a results in PV power prediction errors, leading to the brief override of the optimization algorithm with ADC, as illustrated in
Figure 3.
Figure 17 shows the switching between the DOC and ADC when there are prediction errors, causing the voltage to be higher than 1.098 pu as block 2a of
Figure 2a. Simulation Case 2 to Case 5 are shown. The controllable PV inverters switch back to the ADC at the time of the prediction error at 2:32 pm. As seen in the figure, not all PV inverters switch back to ADC, even though the prediction error of the solar profile is the same for all inverters. There is an allowable gap from 1.095 pu to 1.098 pu for PV inverters to behave with the prediction errors.
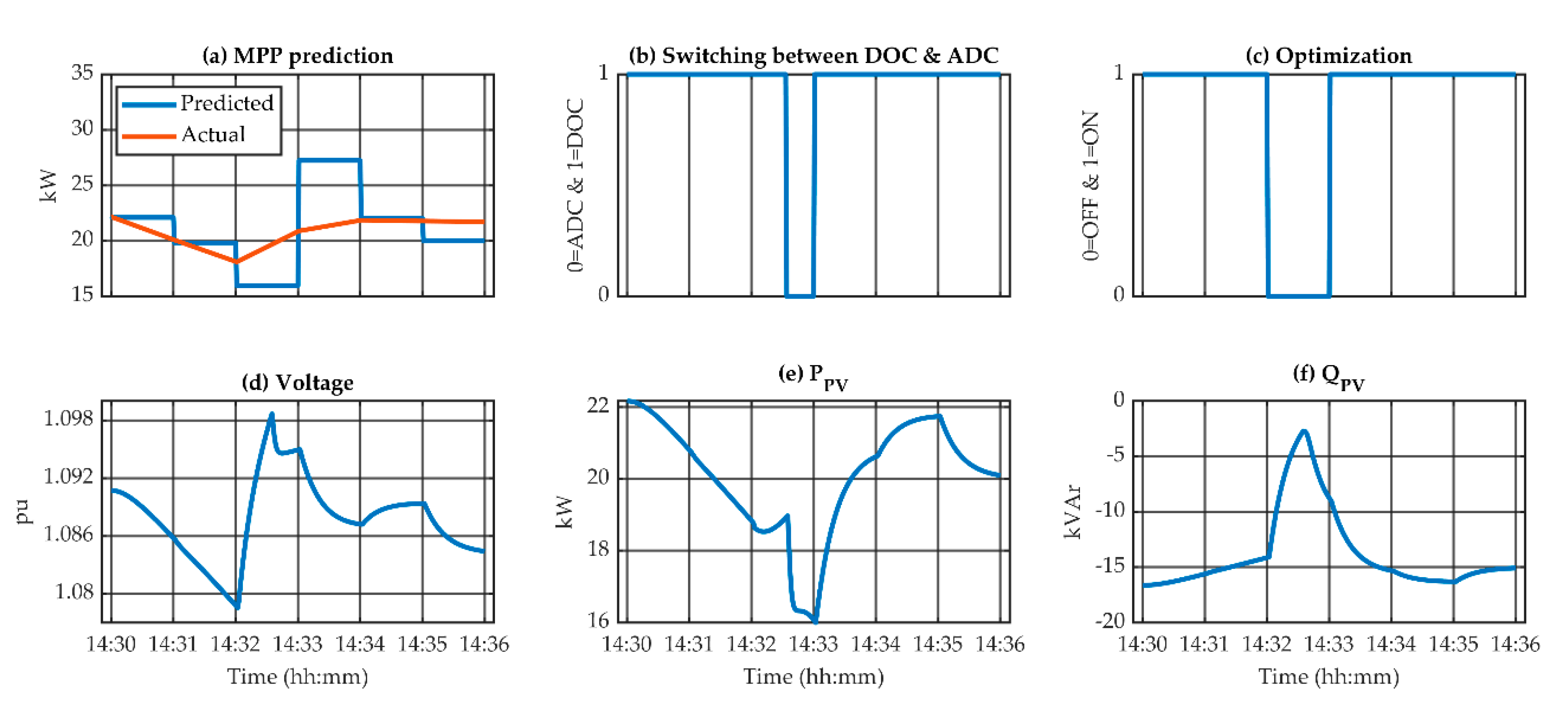
To show how the control system reacts in the event of prediction errors, a profile of a single PV inverter is selected for illustration.
Figure 18 shows a selected profile of PV5 in simulation Case 2. As seen in
Figure 17a, PV5 is switched from DOC to ADC at 2:32 pm. Additionally, in Case 2 of
Figure 16, the optimization is not applied for a short time around 2:32 pm.
In
Figure 18a, the prediction of the MPP profile is around 3.5 kW lower than the actual value at the time section of 2:32 to 2:33 pm, so that based on the predicted power flow analysis (block 5b of
Figure 2b), the DOC turns off the optimization (block 6b of
Figure 2b) and operates MPP (block 7b of
Figure 2b), as seen in
Figure 18c. Within the MPP operation (block 7b of
Figure 2b), the reactive power of the PV5 is set to return to zero, leading to the reduction of the reactive power consumption and causing a voltage increase as seen in
Figure 18d,18f. When the voltage exceeds 1.098 pu, the inverter switches from DOC to ADC, as seen in
Figure 18b, and remains in this mode until the start of the next minute. During the time of running the ADC, the reactive power consumption is increased and the active power is reduced to maintain the voltage within network limits.
At the time section of 2:33 to 2:34 pm, the DOC predicts a solar power that is approximately 5.8 kW higher than reality, so that the predicted power flow voltage is higher than 1.095 pu (block 5b of
Figure 2b), leading to the turning on of the DOC, as in
Figure 18c. More reactive power is consumed, leading to a reduction in the voltage level.
The virtual loads applied in this research solve the need to know all information of devices outside the controllable area. This reduces not only the calculation power for the controller but also the communication system. The information of the virtual load is the total power (active and reactive) that flows through a bus. The virtual load may have the property of voltage dependence, but in this research, it is considered as a constant power load for the power flow analysis.
The voltage limit in the DOC is 1.095 pu, which is lower than 1.1 pu. The lower voltage limit causes higher active power curtailment. As explained before, the voltage limit for optimization calculation is chosen as being 0.005 pu less than the network threshold of 1.1 pu to allow for any optimization and prediction error. If there is an optimization error causing the bus voltage to be over 1.098 pu, the inverter would be switched back to the ADC to make sure that the voltage limit is not violated. If the voltage limit of DOC is set to be 1.1 pu, in the case of any error and when the voltage limit is violated, the inverter has to be shut down immediately. This would result in the hunting effect of turning on and off the inverter continuously.
6. Conclusions
This paper has presented a DOC using prediction and optimization. The PV inverter limits, including the power capacity and power factor, are considered. The control strategies have been verified by the MATLAB simulation of five different scenarios.
The ADC, in combination with the first-order filter, has been proven to be reliable and effective in avoiding overvoltage and the hunting effect. The ADC also considers the power factor limit and capacity of PV inverters.
The mechanism for the power flow analysis of a group of PV inverters inside a distribution network using the prediction method was introduced. The power flow calculation method using a virtual loads approach is applied to the controller to reduce the prediction calculation and the need to know all devices in a network.
A mechanism to switch between the DOC and ADC of a smart inverter is investigated to ensure network stability even in the event of erroneous optimal calculation and loss of communication. The DOC with a combination of a short time prediction, group optimization and virtual load can be applied for multiple and different groups in the network. This technique can also be applied for optimization of loss communication between controllable devices in further research.
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}