
Detection of Vegetation Encroachment in Power Transmission Line Corridor from Satellite Imagery Using Support Vector Machine: A Features Analysis Approach


Abstract
:1. Introduction
2. Materials and Methods
2.1. Dataset Preparation
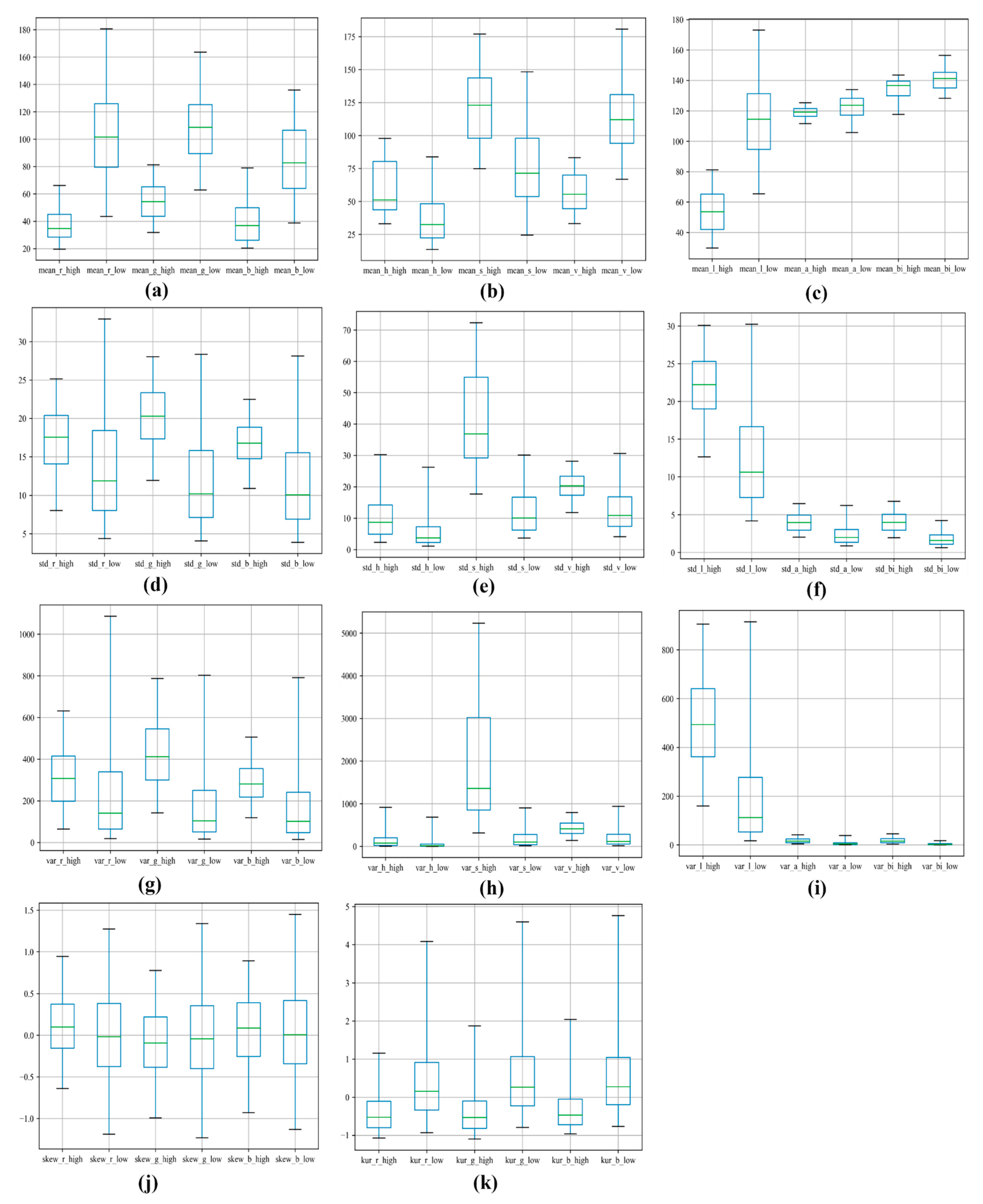
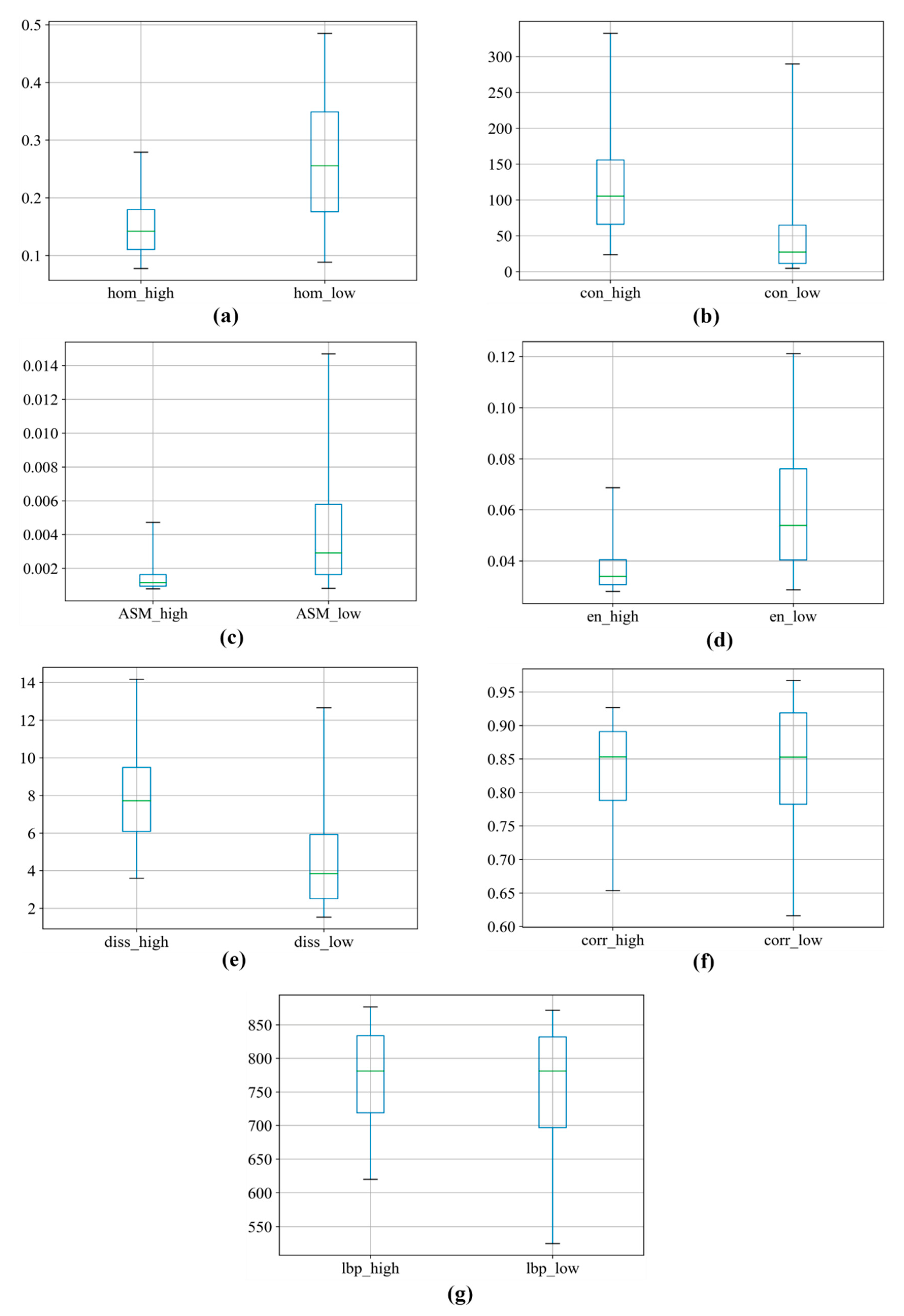
2.2. Feature Extraction
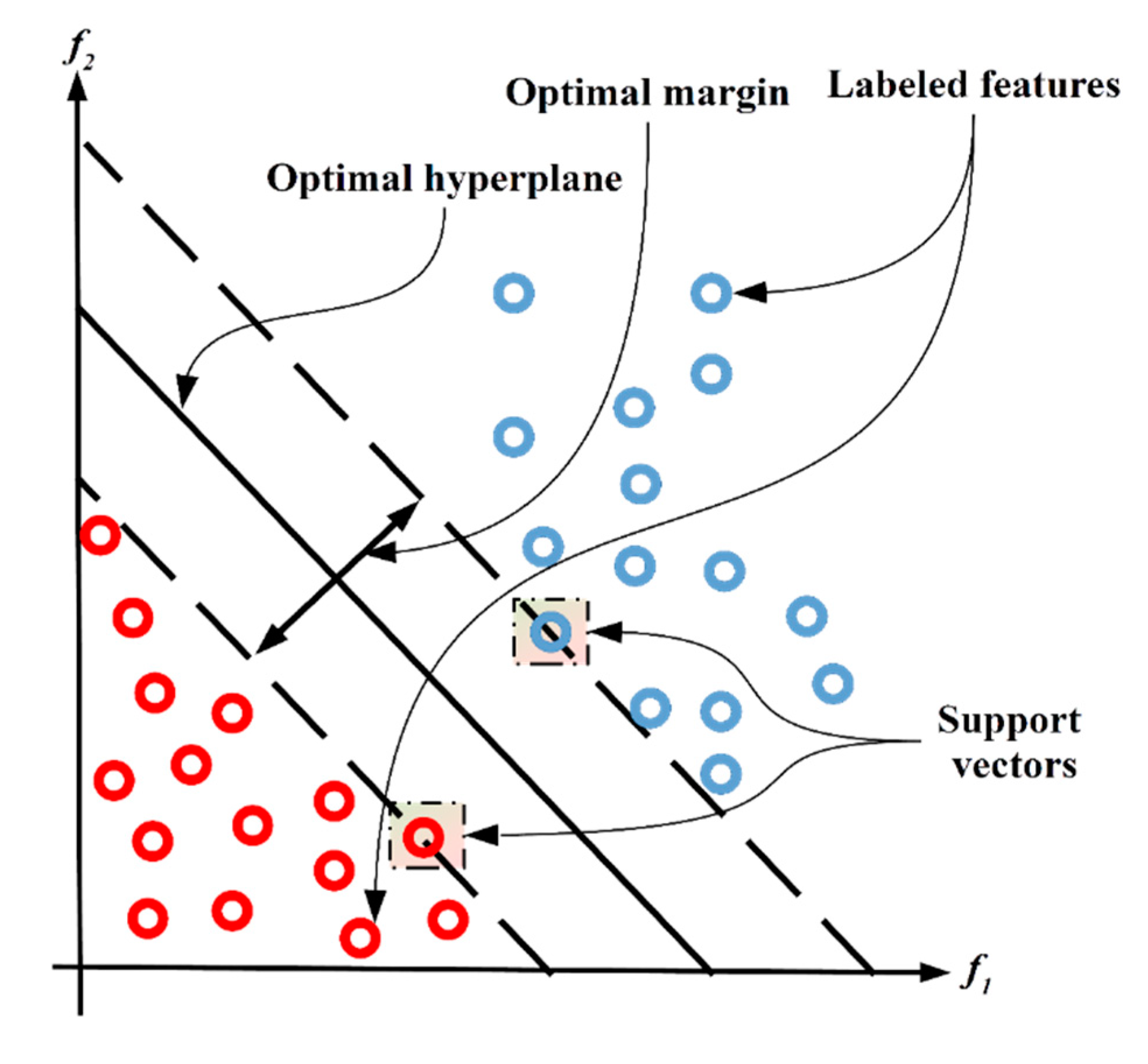
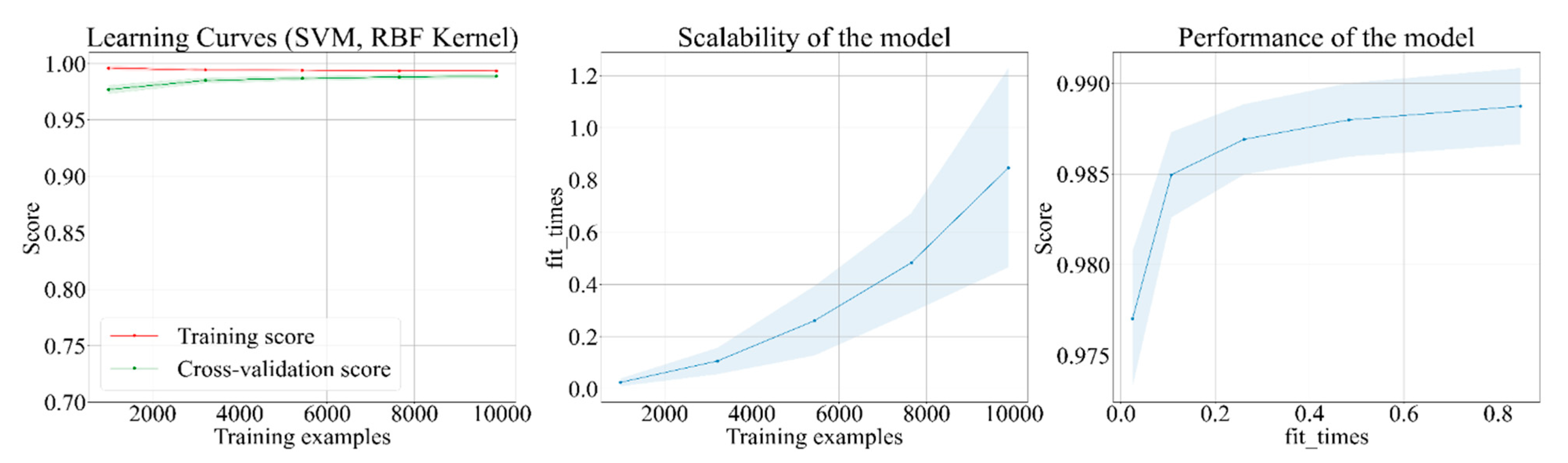
2.3. SVM Training
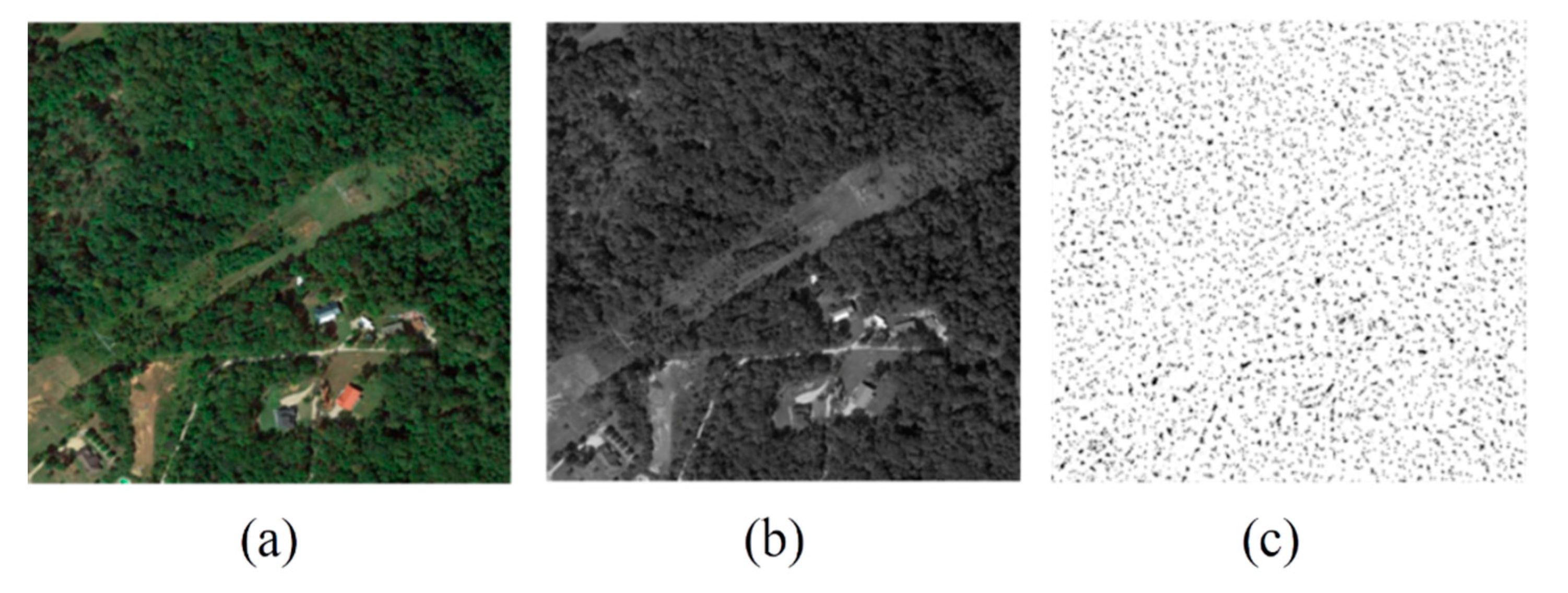
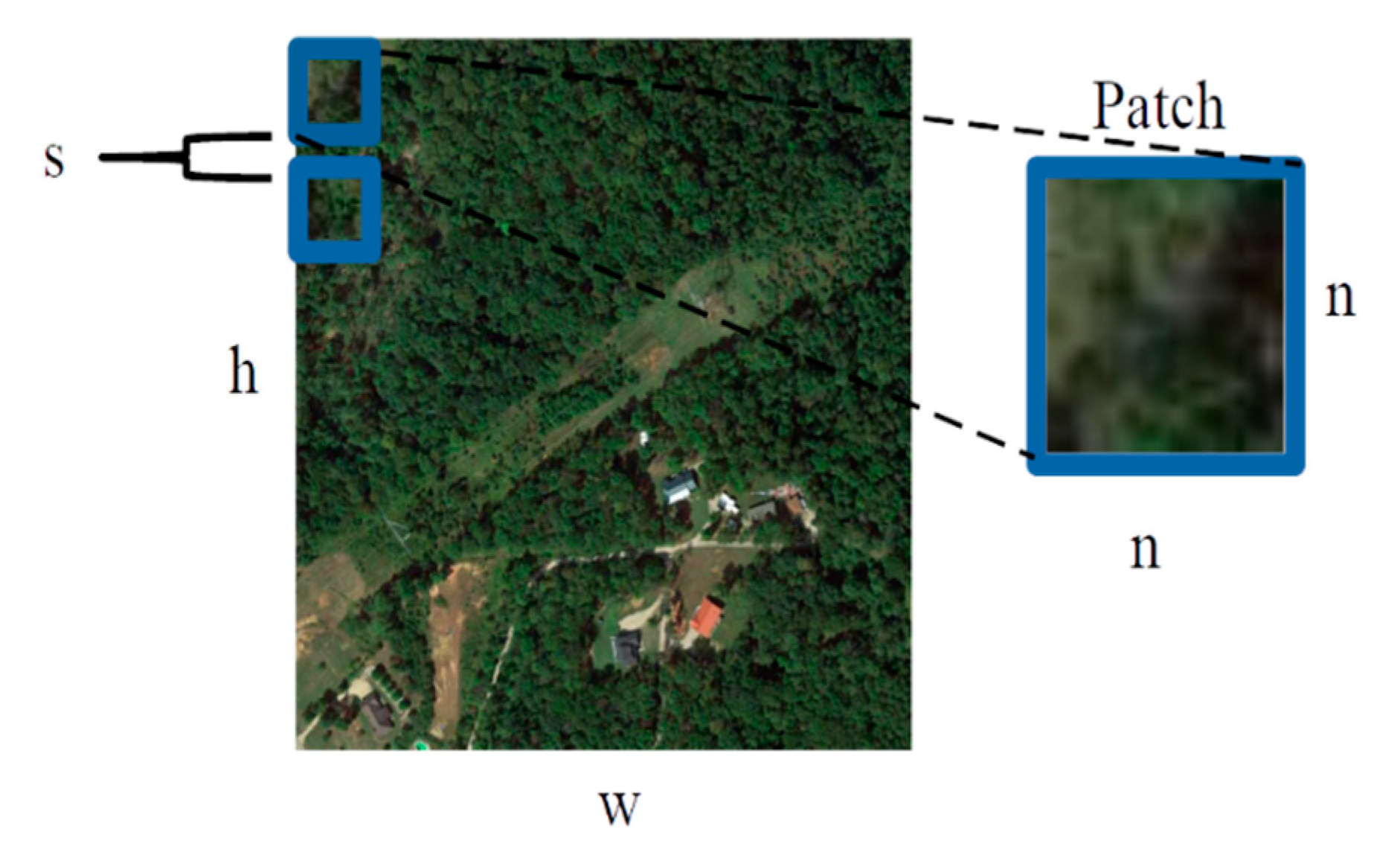
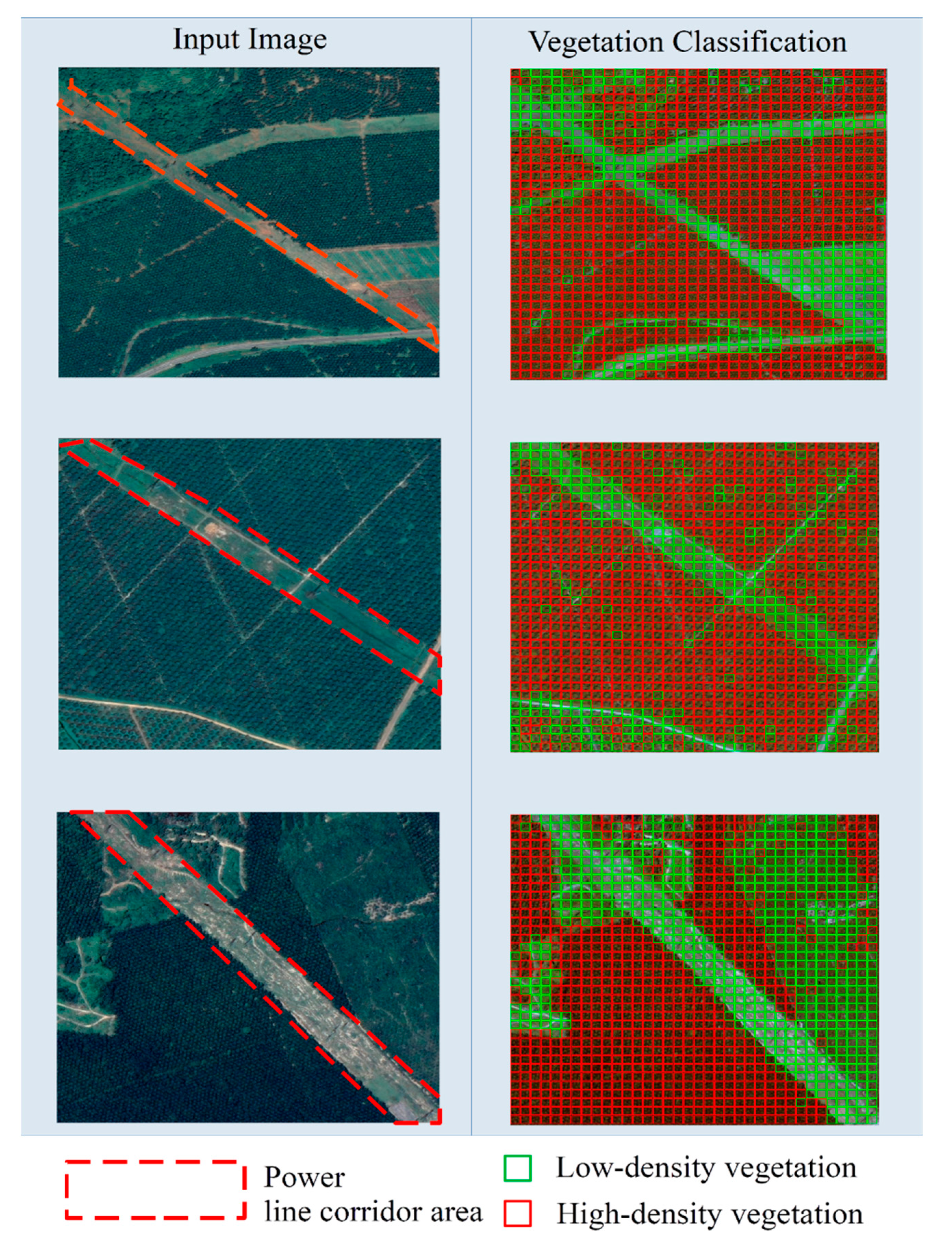
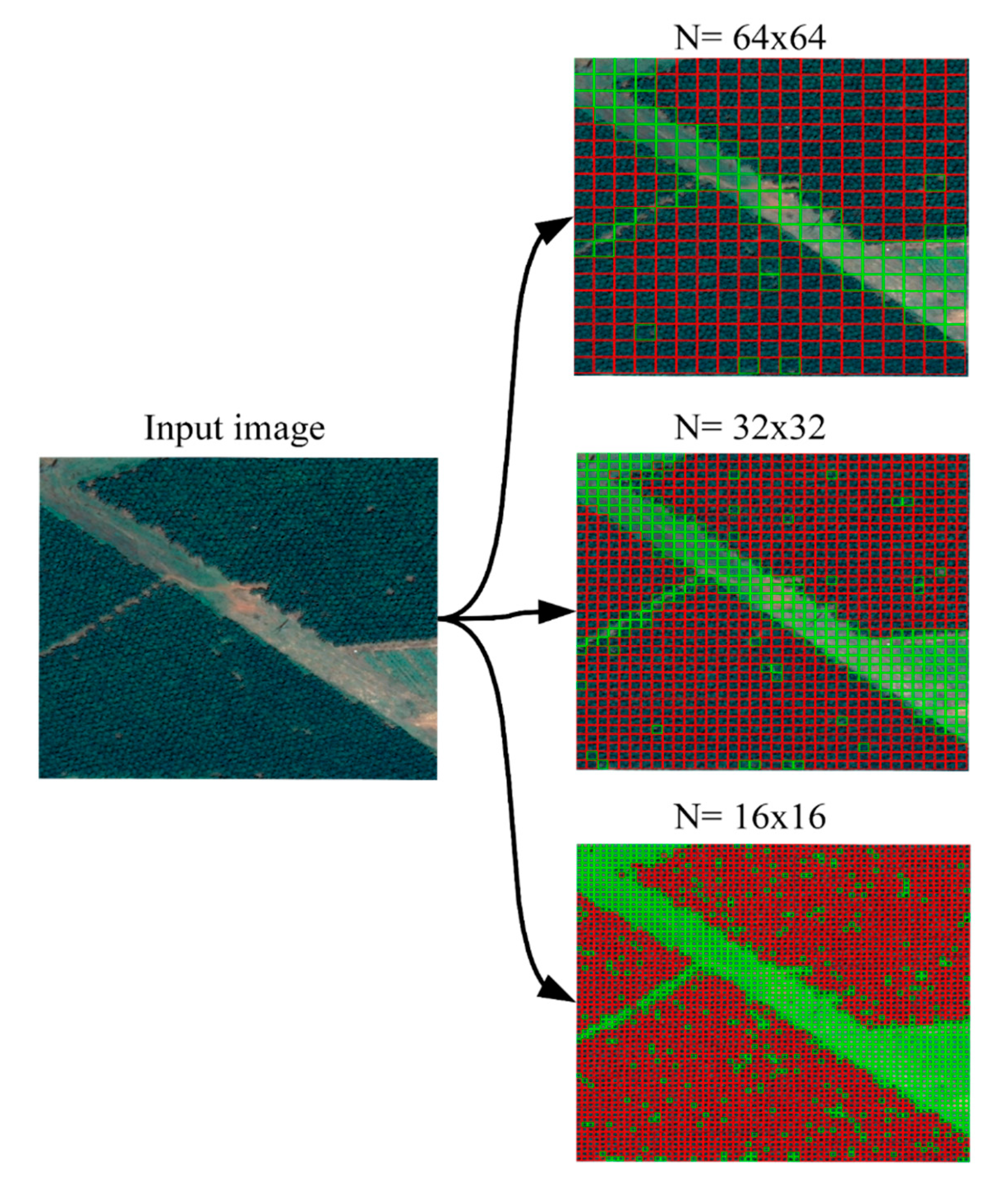
2.4. Automatic Patch Extraction
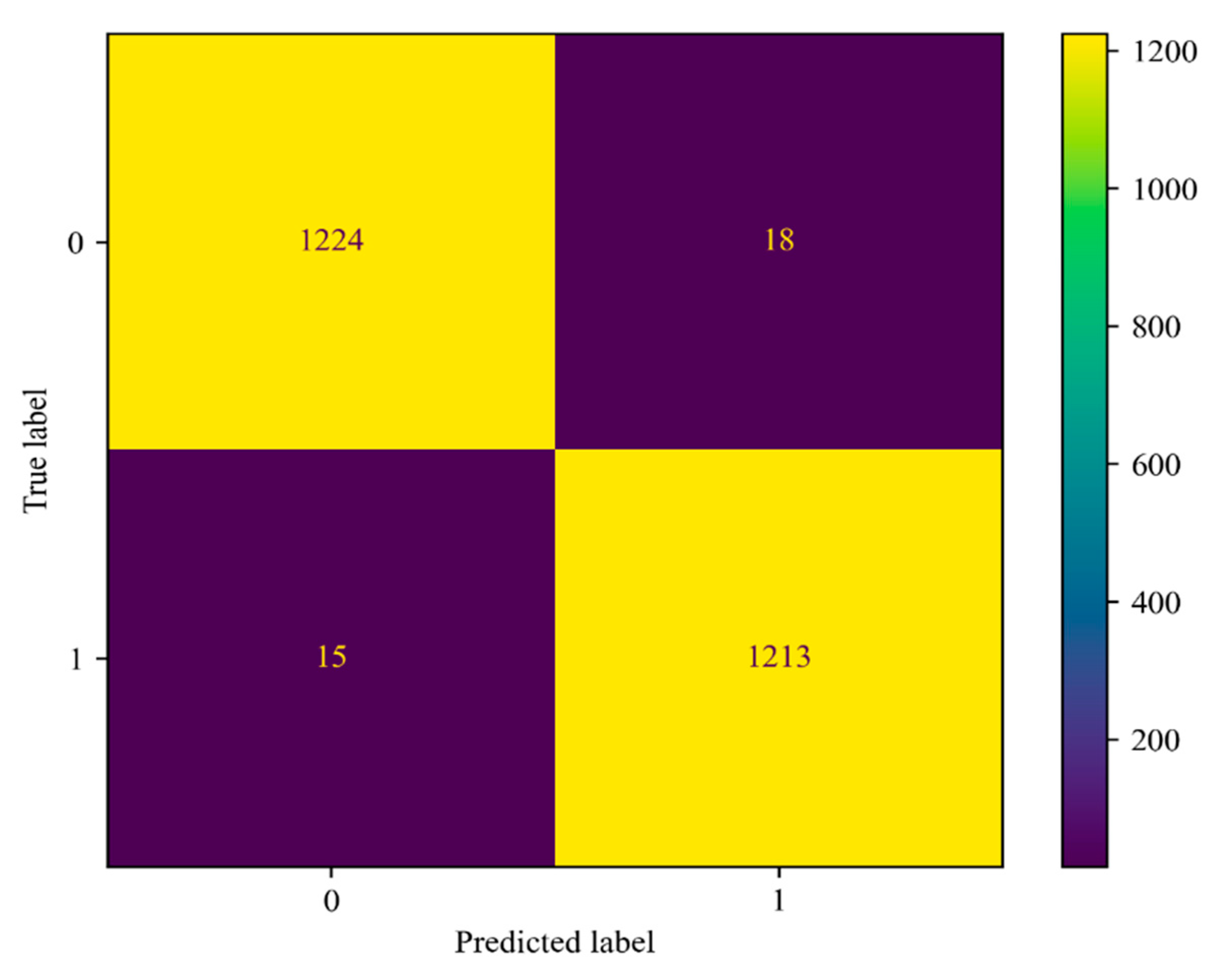
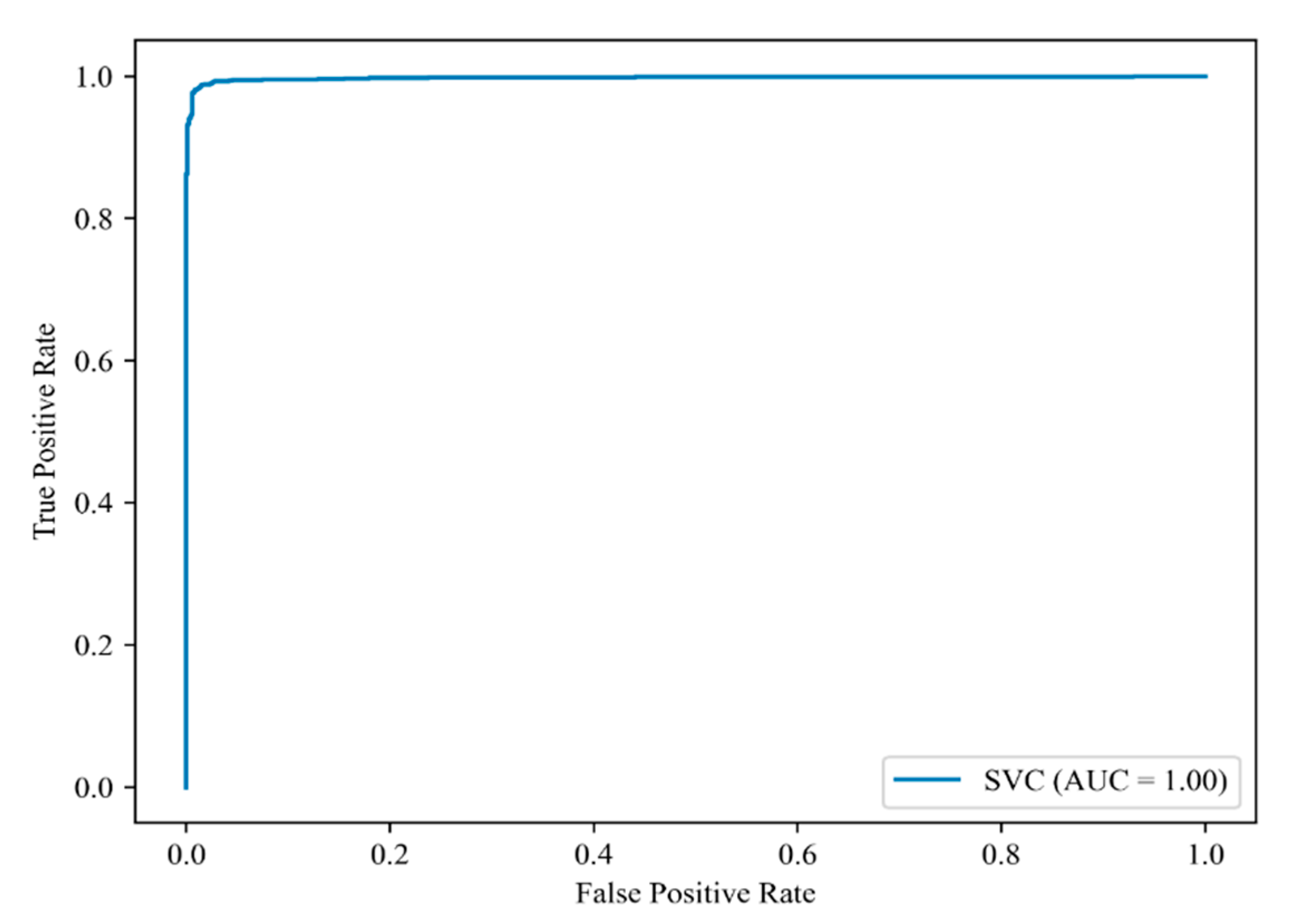
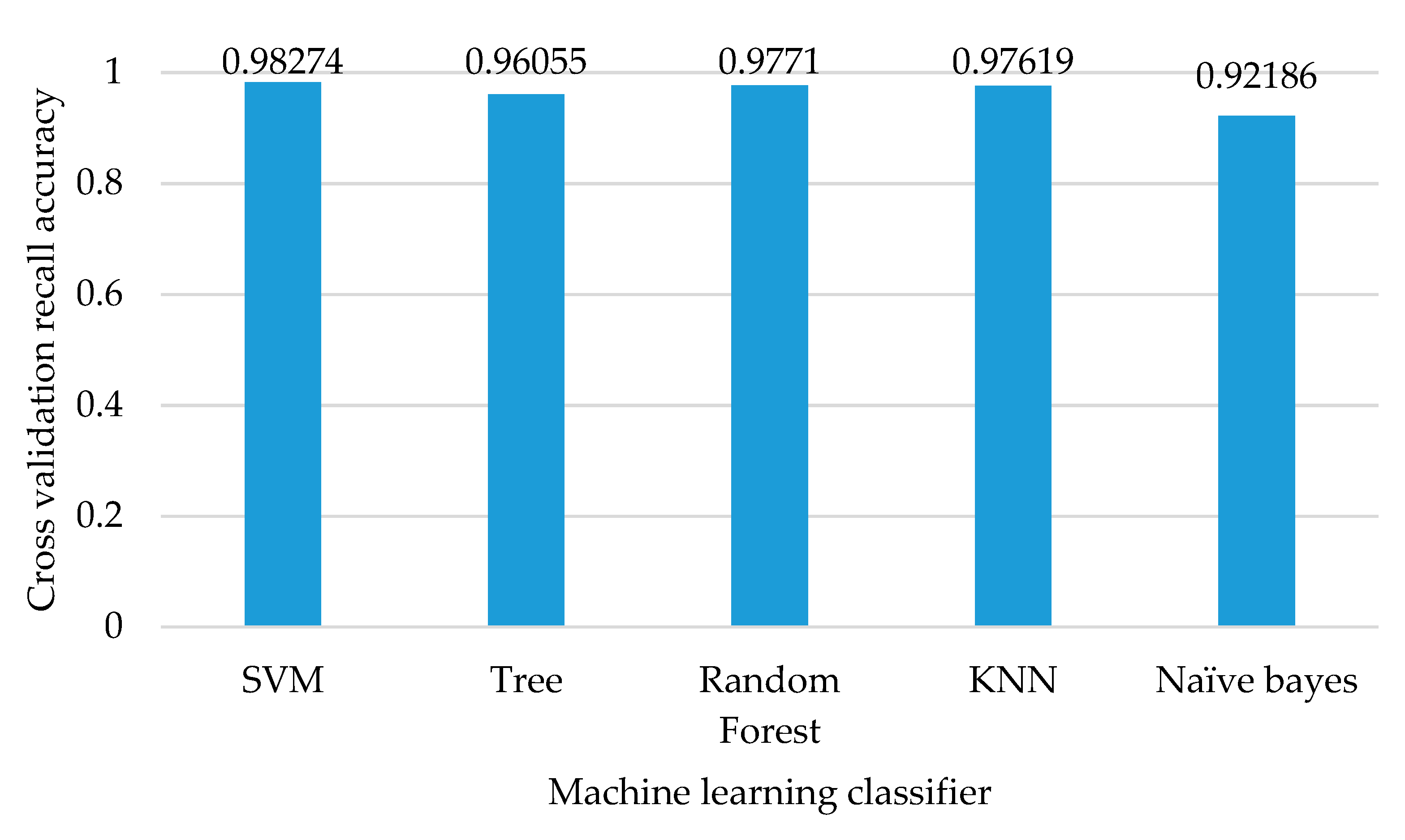
3. Results
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

References
- Alhelou, H.H.; Hamedani-Golshan, M.E.; Njenda, T.C.; Siano, P. A Survey on Power System Blackout and Cascading Events: Research Motivations and Challenges. Energies 2019, 12, 682. [Google Scholar] [CrossRef] [Green Version]
- Gomes-Mota, J.; Brantes, A.; Pinto, L.C.; De Exploracao, D.; Azevedo, F. How environmental factors impact line performance, field results from Southwest Europe. In Proceedings of the 2012 11th International Conference on Environment and Electrical Engineering, Venice, Italy, 18–25 May 2012; pp. 1053–1058. [Google Scholar] [CrossRef]
- Haroun FM, E.; Deros SN, M.; Din, N.M. A review of vegetation encroachment detection in power transmission lines using optical sensing satellite imagery. Int. J. Adv. Trends Comput. Sci. Eng. 2020, 9, 618–624. [Google Scholar] [CrossRef]
- Ahmad, J.; Malik, A.S.; Xia, L.; Ashikin, N. Vegetation encroachment monitoring for transmission lines right-of-ways: A survey. Electr. Power Syst. Res. 2013, 95, 339–352. [Google Scholar] [CrossRef]
- Matikainen, L.; Lehtomäki, M.; Ahokas, E.; Hyyppä, J.; Karjalainen, M.; Jaakkola, A.; Kukko, A.; Heinonen, T. Remote sensing methods for power line corridor surveys. ISPRS J. Photogramm. Remote Sens. 2016, 119, 10–31. [Google Scholar] [CrossRef] [Green Version]
- Ahmad, J.; Malik, A.S.; Xia, L. Effective techniques for vegetation monitoring of transmission lines right-of-ways. In Proceedings of the 2011 IEEE International Conference on Imaging Systems and Techniques, Batu Ferringhi, Malaysia, 17–18 May 2011; pp. 34–38. [Google Scholar]
- Agrawal, S.; Khairnar, G.B. A comparative assessment of remote sensing imaging techniques: Optical, sar and lidar. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, 42, 1–6. [Google Scholar] [CrossRef] [Green Version]
- Purnamasayangsukasih, P.R.; Norizah, K.; Ismail, A.A.M.; Shamsudin, I. A review of uses of satellite imagery in monitoring mangrove forests. IOP Conf. Ser. Earth Environ. Sci. 2016, 37, 012034. [Google Scholar] [CrossRef]
- Liu, G.-R.; Liang, C.-K.; Kuo, T.-H.; Lin, T.-H.; Huang, S.-J. Comparison of the NDVI, ARVI and AFRI Vegetation Index, Along with Their Relations with the AOD Using SPOT 4 Vegetation Data. Terr. Atmos. Ocean. Sci. 2004, 15, 15–31. [Google Scholar] [CrossRef] [Green Version]
- Mikhalap, S.; Trashenkov, S.; Vasilyeva, V. Study of overhead power line corridors on the territory of pskov region (russia) based on satellite sounding data. Vide. Tehnol. Resur. Environ. Technol. Resour. 2019, 1, 164–167. [Google Scholar] [CrossRef]
- Jardini, M.G.M.; Jardini, J.A.; Magrini, L.C.; Masuda, M.; Le Silva, P.R.; Quintanilha, J.A.; Beltrame, A.M.K.; Jacobsen, R.M. Vegetation Control of Transmission Lines Right-of-way. In Proceedings of the 2007 3rd International Conference on Recent Advances in Space Technologies, Istanbul, Turkey, 14–16 June 2007; pp. 660–665. [Google Scholar]
- Kwan, C.; Gribben, D.; Ayhan, B.; Li, J.; Bernabe, S.; Plaza, A. An Accurate Vegetation and Non-Vegetation Differentiation Approach Based on Land Cover Classification. Remote Sens. 2020, 12, 3880. [Google Scholar] [CrossRef]
- Kaufman, Y.J.; Tanre, D. Atmospherically Resistance Vegetation Index (ARVI) for EOS-MODIS. IEEE Trans. Geosci. Remote Sens. 1992, 30, 261–270. [Google Scholar] [CrossRef]
- Kobayashi, Y.; Karady, G.G.; Heydt, G.T.; Olsen, R.G. The Utilization of Satellite Images to Identify Trees Endangering Transmission Lines. IEEE Trans. Power Deliv. 2009, 24, 1703–1709. [Google Scholar] [CrossRef]
- Moeller, M.S. Monitoring Powerline Corridors with Stereo Satellite Imagery. In Proceedings of the MAPPS/ASPRS Conference, San Antonio, TX, USA, 6–10 November 2006; pp. 1–6. Available online: http://www.asprs.org/a/publications/proceedings/fall2006/0034.pdf (accessed on 1 June 2021).
- Aqeel, M.; Jamil, M.; Yusoff, I. Introduction to Remote Sensing of Biomass. In Biomass and Remote Sensing of Biomass; IntechOpen: Beijing, China, September 2011; pp. 129–169. Available online: https://www.intechopen.com/books/biomass-and-remote-sensing-of-biomass/introduction-to-remote-sensing-of-biomass (accessed on 1 June 2021). [CrossRef] [Green Version]
- Berberoglu, S.; Akin, A.; Atkinson, P.M.; Curran, P.J. Utilizing image texture to detect land-cover change in Mediterranean coastal wetlands. Int. J. Remote Sens. 2010, 31, 2793–2815. [Google Scholar] [CrossRef] [Green Version]
- Li, Z.; Hayward, R.; Zhang, J.; Jin, H.; Walker, R. Evaluation of Spectral and Texture Features for Object-Based Vegetation Species Classification Using Support Vector Machines. In Proceedings of the ISPRS TC VII Symp—100 Years ISPRS, Vienna, Austria, 5–7 July 2010; pp. 122–127. Available online: http://www.isprs.org/proceedings/XXXVIII/part7/a/pdf/122_XXXVIII-part7A.pdf (accessed on 1 June 2021).
- Iovan, C.; Boldo, D.; Cord, M. Detection, Segmentation and Characterisation of Vegetation in High-Resolution Aerial Images for 3D City Modelling. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2008, 36, 247–252. [Google Scholar]
- Ganesan, P.; Rajini, V. Assessment of satellite image segmentation in RGB and HSV color space using image quality measures. In Proceedings of the 2014 International Conference on Advances in Electrical Engineering (ICAEE), Vellore, India, 9–11 January 2014. [Google Scholar]
- Shijin Kumar, P.S.; Dharun, V.S. Extraction of Texture Features using GLCM and Shape Features using Connected Regions. Int. J. Eng. Technol. 2016, 8, 2926–2930. [Google Scholar] [CrossRef] [Green Version]
- Liang, Z.; Wei, J.; Zhao, J.; Liu, H.; Li, B.; Shen, J.; Zheng, C. The statistical meaning of kurtosis and its new application to identification of persons based on seismic signals. Sensors 2008, 8, 5106–5119. [Google Scholar]
- Haryanto, T.; Pratama, A.; Suhartanto, H.; Murni, A.; Kusmardi, K.; Pidanic, J. Multipatch-GLCM for Texture Feature Extraction on Classification of the Colon Histopathology Images using Deep Neural Network with GPU Acceleration. J. Comput. Sci. 2020, 16, 280–294. [Google Scholar] [CrossRef] [Green Version]
- Suresh, A.; Shunmuganathan, K.L. Image texture classification using gray level co-occurrence matrix based statistical features. Eur. J. Sci. Res. 2012, 75, 591–597. [Google Scholar]
- Zhou, W.; Ahrary, A.; Kamata, S.-I. Image Description with Local Patterns: An Application to Face Recognition. IEICE Trans. Inf. Syst. 2012, E95-D, 1494–1505. [Google Scholar] [CrossRef] [Green Version]
- Yuan, J.-H.; Huang, D.-S.; Zhu, H.-D.; Gan, Y. Completed hybrid local binary pattern for texture classification. In Proceedings of the 2014 International Joint Conference on Neural Networks (IJCNN), Beijing, China, 6–11 July 2014; pp. 2050–2057. [Google Scholar]
- Boser, B.E.; Guyon, I.M.; Vapnik, V.N. A training algorithm for optimal margin classifiers. In Proceedings of the Fifth Annual Workshop on Computational Learning Theory, Pittsburgh, PA, USA, 27–29 July 1992; pp. 144–152. [Google Scholar]
- Corinna, C.; Vapnik, V. Support-Vector Networks. Mach. Learn. 1995, 20, 273–297. [Google Scholar]
- Shekar, B.H.; Dagnew, G. Grid Search-Based Hyperparameter Tuning and Classification of Microarray Cancer Data. In Proceedings of the 2019 Second International Conference on Advanced Computational and Communication Paradigms (ICACCP), Gangtok, India, 25–28 February 2019; pp. 1–8. [Google Scholar] [CrossRef]
- Goutte, C.; Gaussier, E. A probabilistic interpretation of precision, recall and F-score, with implication for evaluation. Lect. Notes Comput. Sci. 2005, 3408, 345–359. [Google Scholar]
- Proy, C.; Tanré, D.; Deschamps, P.Y. Evaluation of topographic effects in remotely sensed data. Remote Sens. Environ. 1989, 30, 21–32. [Google Scholar] [CrossRef]
- Hao, D.; Wen, J.; Xiao, Q.; Wu, S.; Lin, X.; You, D.; Tang, Y. Modeling Anisotropic Reflectance Over Composite Sloping Terrain. IEEE Trans. Geosci. Remote Sens. 2018, 56, 3903–3923. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | |||||
|---|---|---|---|---|---|
| Kernel | C | γ | r | d | Cross-Validation Recall Accuracy |
| Linear | 10 | - | - | - | 0.96421 |
| RBF | 100 | 0.01 | - | - | 0.98274 |
| Polynomial | 1000 | 0.01 | 1 | 2 | 0.98003 |
| Sigmoid | 1000 | - | 0 | - | 0.86830 |
| 1300 × 1300-Pixel Image | |||
|---|---|---|---|
| Patch Size (Pixel) | Slicing Time (s) | Feature Extraction + Classification Time (s) | Total Detection Time (s) |
| 128 × 128 | 0.442927 | 9.429314 | 9.872241 |
| 64 × 64 | 0.818342 | 12.76653 | 13.58487 |
| 32 × 32 | 2.415230 | 18.02610 | 20.44133 |
| 16 × 16 | 82.29790 | 111.42492 | 193.7228 |
| Cross-Validation Recall Accuracy | ||||
|---|---|---|---|---|
| Feature | SVM (Poly) | SVM (Linear) | SVM (RBF) | SVM (Sigmoid) |
| Statistical moment of the RGB color space | 0.96906 | 0.95975 | 0.96760 | 0.83979 |
| Statistical moment of the RGB color space + skew moment + kurtosis moment | 0.97586 | 0.96291 | 0.97513 | 0.83469 |
| Statistical moment of the HSV color space | 0.96469 | 0.95594 | 0.96478 | 0.88515 |
| Statistical moment of the CIELAB | 0.96833 | 0.94792 | 0.96898 | 0.87332 |
| Statistical moment of the RGB color space + statistical moment of the HSV color space | 0.97359 | 0.96285 | 0.97424 | 0.84879 |
| LBP feature | 0.54291 | 0.53562 | 0.54331 | 0.45829 |
| GLCM features | 0.81687 | 0.77013 | 0.81736 | 0.66287 |
| GLCM features + LBP feature | 0.84453 | 0.79393 | 0.844534 | 0.64049 |
| GLCM features + statistical moment of the RGB color space + statistical moment of the HSV color space + statistical moment of the CIELAB color space | 0.97617 | 0.97449 | 0.97935 | 0.88700 |
| Selected features | 0.9800 | 0.96421 | 0.98274 | 0.86830 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mahdi Elsiddig Haroun, F.; Mohamed Deros, S.N.; Bin Baharuddin, M.Z.; Md Din, N. Detection of Vegetation Encroachment in Power Transmission Line Corridor from Satellite Imagery Using Support Vector Machine: A Features Analysis Approach. Energies 2021, 14, 3393. https://doi.org/10.3390/en14123393
Mahdi Elsiddig Haroun F, Mohamed Deros SN, Bin Baharuddin MZ, Md Din N. Detection of Vegetation Encroachment in Power Transmission Line Corridor from Satellite Imagery Using Support Vector Machine: A Features Analysis Approach. Energies. 2021; 14(12):3393. https://doi.org/10.3390/en14123393
Chicago/Turabian StyleMahdi Elsiddig Haroun, Fathi, Siti Noratiqah Mohamed Deros, Mohd Zafri Bin Baharuddin, and Norashidah Md Din. 2021. "Detection of Vegetation Encroachment in Power Transmission Line Corridor from Satellite Imagery Using Support Vector Machine: A Features Analysis Approach" Energies 14, no. 12: 3393. https://doi.org/10.3390/en14123393