Distributed Battery Energy Storage Co-Operation for Renewable Energy Sources Integration


Abstract
:1. Introduction
- 1
- BESSs and RESs are owned by different stakeholders who have a unique trading strategy and risk level.
- 2
- Each system has a different model, operational costs, and technical constraints.
- 3
- With a large number of participants, a centralized energy management solution might not be feasible.
- 1
- Considering the power flow model in the MAS framework.
- 2
- Proposing the idea of the MAS trading packages; as each ESS-MAS has different packages of storage plans with varying prices. The price of any package depends on the storage depth of discharge (DOD) and the daily number of cycles (DNC).
- 3
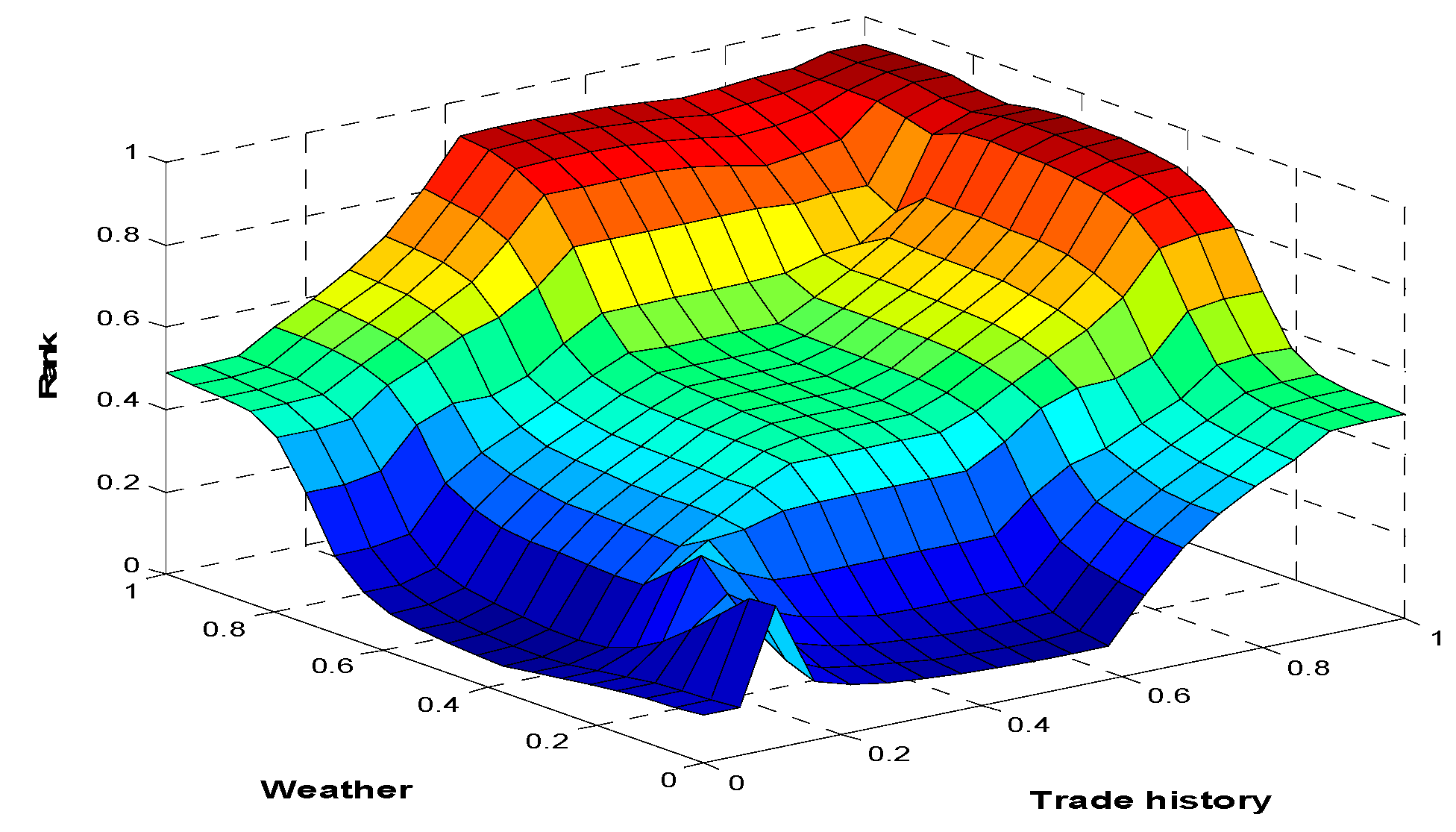
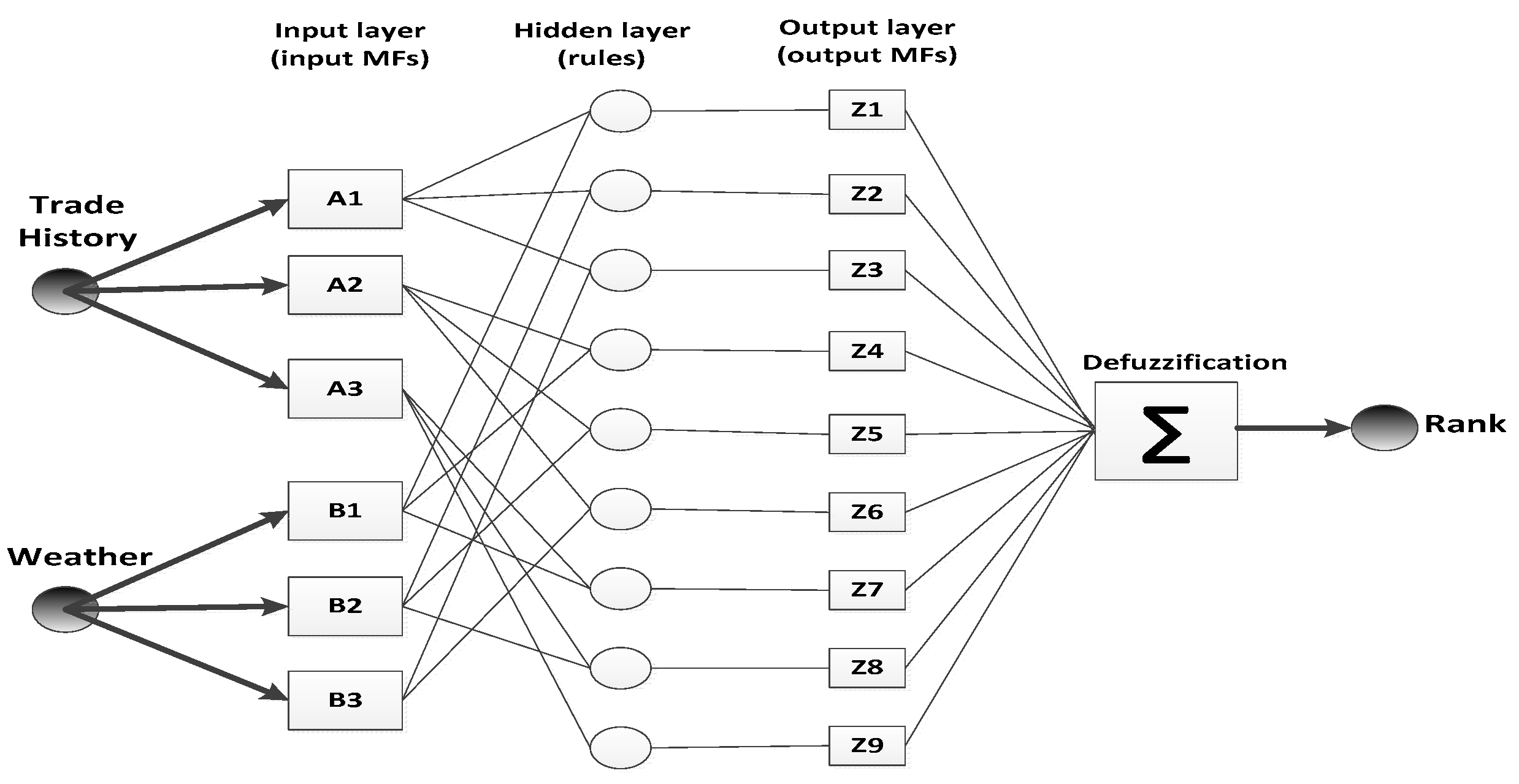
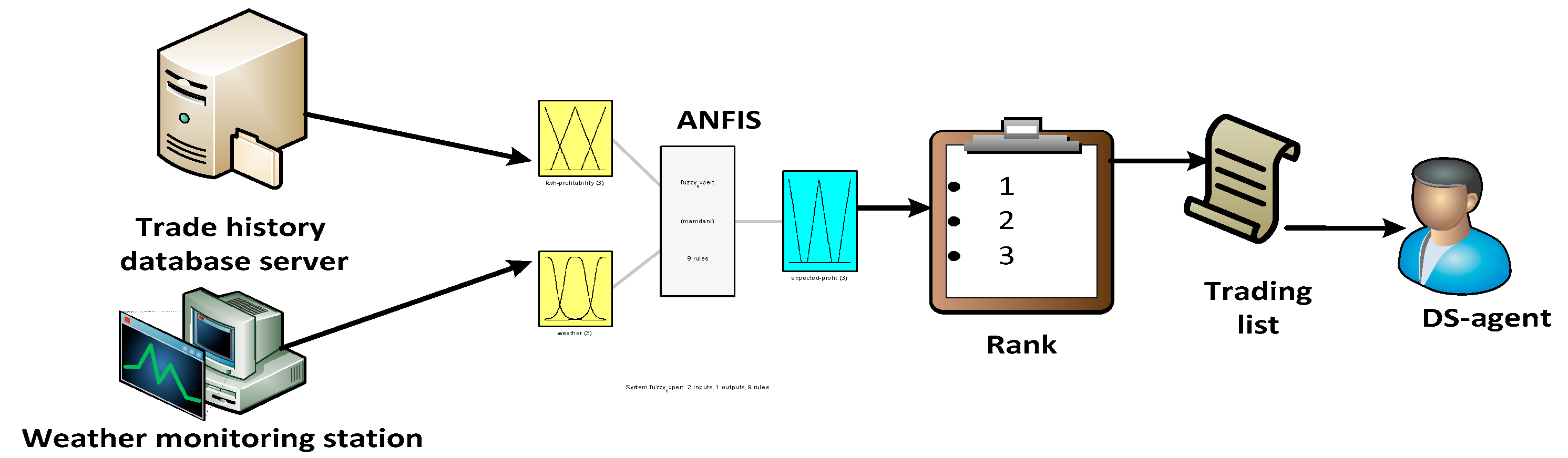
- Developing MAS agents with learning capabilities. The learning process takes into account the market status, MAS trade history, and the RES generation.
- 4
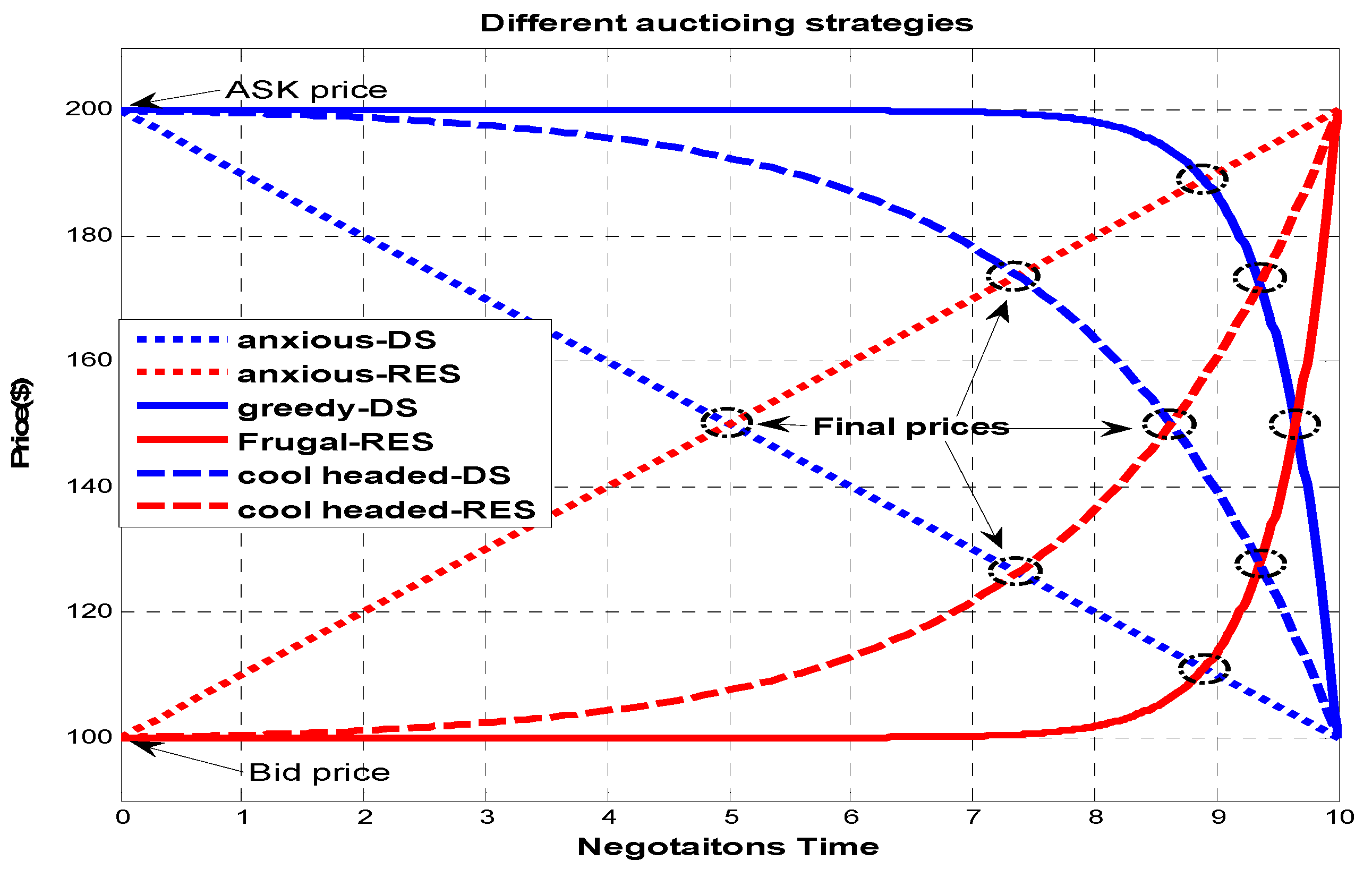
- Proposing different auctioning strategies between the agents. The strategies represent the diverse risk levels and bargaining ways to give the agent variety of choices during trading.
2. Problem Formulation
- 1
- The ESS-agent: it targets maximizing the BESS owners’ net profit. The ESS-agent accounts for the ESS storage cost [28] and the ESS expended life cost (depletion cost) [29] of the battery (which is a function of the DOD and the daily number of cycles (DNC). The agent applies the auctioning strategy and risk management levels when dealing with RES-agents.
- 2
- The RES-agent: this agent aims at maximizing the owner’s profit either by trading directly with the grid as a price taker or by cooperating with other ESS-agents to make a higher profit from the daily energy price’s difference. The RES-agent accounts for its expected energy prediction error as it represents a risk factor for his profit.
- 3
- The grid agent: it represents the energy market. It contracts with any ESS-agent or buys energy from any RES directly as a price taker. It provides the expected market price to all agents.
- 4
- The distributed network operator (DNO): it guarantees that all the trading deals will not violate the power system constraints.
2.1. MAS Modes
2.1.1. Energy-Arbitrage Mode (EA)
2.1.2. Price Taker Mode (PT)
2.1.3. Time Shifting Mode (TS)
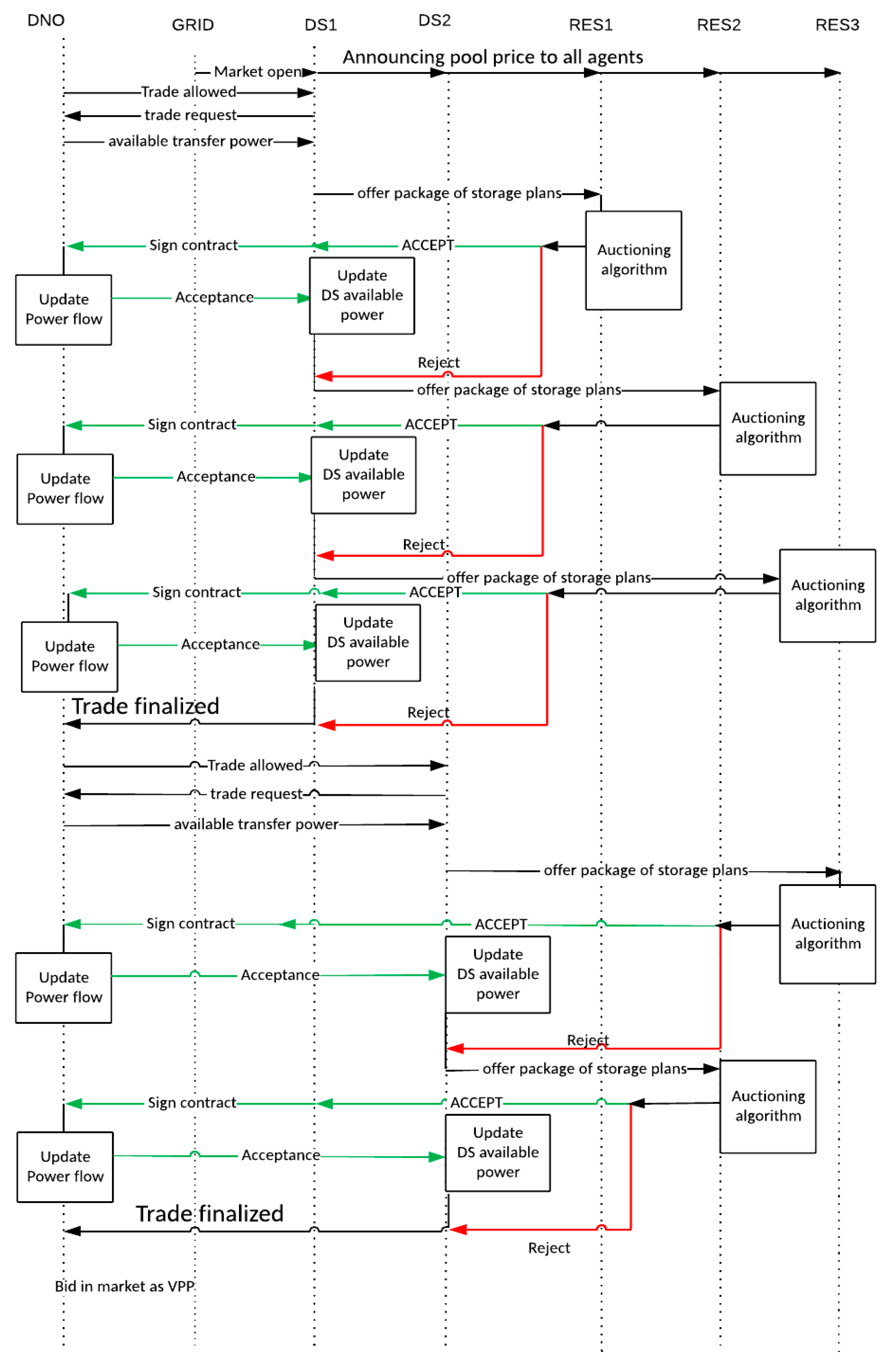
3. Proposed MAS Trading Strategy
3.1. Phase-A (The Pre-Auction Phase)
3.2. Phase-B (The Auction Phase)
3.2.1. The Trading List
3.2.2. The Offer
3.2.3. The Offer Evaluation
- Reject: the first response means that the ESS-agent TS offer is not more profitable than the PT trade; so, it is rejected.
- Accept: the second means that the TS trade revenue is so high than the PT and the TS offer is accepted with no negotiations.
- Counter-offer: the third response means that the TS offer is profitable for the RES, but the profit is not that worthy. In such a case, the RES sends back a counter-offer for the storage (bid price ) as in (42)
3.2.4. The Offer Response:
3.3. Phase-C (The Post-Auction Phase)
- (1)
- After the contract approval, the ESS-agent updates the available power constraint and the initial state of charge (remaining capacity) in the battery to make another trade with another agent. The constraints update ensures that the BESS cannot discharge power for one RES while charging power for another RES and vice versa. It guarantees the power flow constraints and the state of charge limits for the new deal (d). On the other hand, The RES-agent updates its available power for trade by subtracting the contracted power with the BESS from its expected generation. The available RES power can be bought directly to the grid (PT-Mode) or contract with other BESS (TS-Mode) .
- (2)
- After updating the power constraint, the ESS-agent starts trading with the next RES-agent in its trading list. The three phases are repeated until the list finishes, or the BESS capacity is fully occupied.
- (3)
- After the first BESS-agent finishes negotiations, the DNO calls the next member in the BESS trading list, and so on till all ESSs finish trading.
- (4)
- Finally, for all agents cooperate in a TS-Mode, all the bids are combined and traded in the global market. The profits of these trades are shared according to the auctioning results.
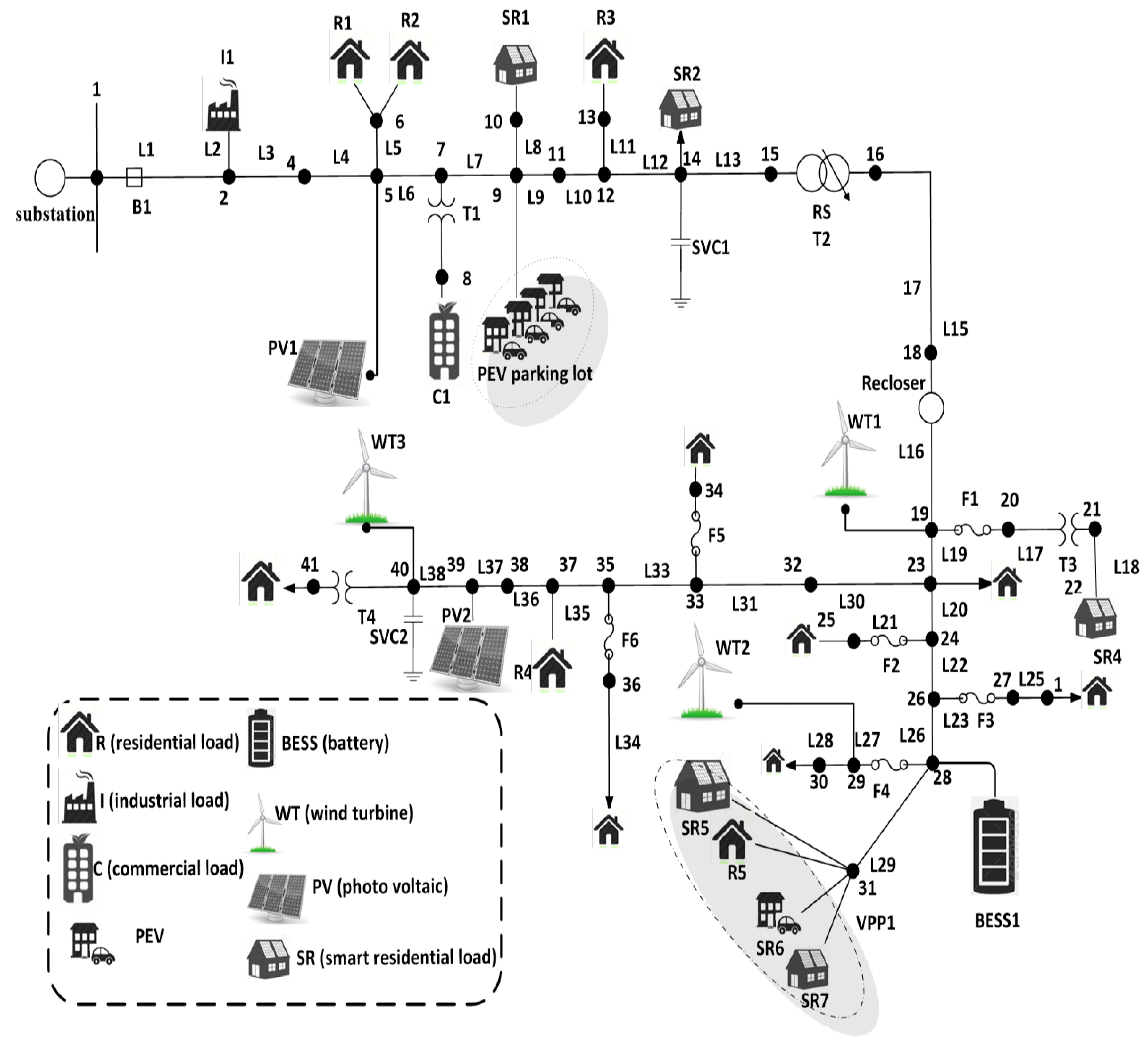
4. Case Study
- ESS-agents will develop a mature and well-investigated trading list. Each ESS-agent may even have favorable RES trading partners.
- With the increasing number of ESS- and RES-agents, the computation time of the MAS algorithm will be longer. The solution to this problem is either by increasing the negotiations window time or improving the computers’ processing power.
- Some ESS-agents can have longer than one day-ahead contract with RES-agents. It will be interesting to have a weekly or monthly collaboration. The problem that faces long time trading is the uncertainty of the market price and RES power.
- During the pre-auction phase, the DNO solves a power flow problem. The communication delay is the network delay and the solver time for the power flow problem, which is around 4.166 s.
- During the auction phase, for a specific plan (TS- or ES-Modes), the linear programming solver time is around 0.7–0.9 s per trade.
- During the post-auction phase, updating the BESSs power limits takes around 0.076 s for this system.
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| BESSs | Battery Energy Storage Systems |
| DNC | Daily Number of Cycles |
| DNO | Distributed Network Operator |
| DOD | Depth of Discharge |
| DSM | Demand-Side Management |
| EA | Energy Arbitrage |
| EA | Energy-Arbitrage Mode |
| ESSs | Energy Storage Systems |
| MAS | Multiagent System |
| PT | Price Taker Mode |
| RESs | Renewable Energy Resources |
| SOC | State of Charge |
| TS | Time Shifting Mode |
| VPP | Virtual power Plant |
| BESS rated power | |
| Desired RES profit share from trading with the BESS agent | |
| BESS storage bank unit cost ($/kW) | |
| BESS set of storage plans | |
| Market price at time ($) | |
| BESS fixed storage cost ($/kW) | |
| BESS expended life cost ($) | |
| BESS charging and discharging efficiency | |
| BESS profit share of the total profit pro in case of time-shifting trade (PU) | |
| Minimum and maximum permissible voltage levels (V) | |
| Load and generators reactive power at bus at time k (VAR) | |
| RES generated power at time (kW) | |
| Load and generators active power at bus at time k (W) | |
| Number of buses | |
| BESS storage cost constants | |
| Impedance of the branch | |
| Storage minimum state of charge | |
| BESS maximum number of charging cycles | |
| Conductance of line | |
| Storage maximum depth of discharge | |
| Susceptance of line | |
| RES r Levelized generation cost ($/kWh) | |
| Maximum permissible power losses (W) | |
| Maximum power to import or export to the grid (W) | |
| Ampacity of the branch (A) |
| Bid price to the storage s for a specific time-shifting trading | |
| Ask price from the storage s to a RES r for as specific storage plans i | |
| RMS current of the branch at time (A) | |
| BESS number of charging cycles at time | |
| BESS state of charge at time (PU) | |
| BESS charging power at time (kW) | |
| BESS charging power limit at time (kW) | |
| BESS discharging power at time (kW) | |
| Active power of the bus at time (kW) | |
| BESS active power at time (kW) | |
| BESS and the RES r total power in case of time-shifting (kW) | |
| BESS profit in case of energy arbitrage trading ($) | |
| Reactive power of the bus at time (kW) | |
| BESS reactive power at time | |
| RMS voltage of the bus at time (V) | |
| Voltage angle difference between the buses and (deg) | |
| BESS discharging power limit at time (kW) | |
| Total power losses at time (kW) | |
| BESS profit in case of energy arbitrage ($) | |
| RES r profit in case of price taker trading mode ($) | |
| BESS and the RES r profit in case of time-shifting ($) | |
| BESS optimal profit charging plan |
References
- McArthur, S.D.J.; Davidson, E.M.; Catterson, V.M.; Dimeas, A.L.; Hatziargyriou, N.D.; Ponci, F.; Funabashi, T. Multi-Agent Systems for Power Engineering Applications—Part I: Concepts, Approaches, and Technical Challenges. IEEE Trans. Power Syst. 2007, 22, 1743–1752. [Google Scholar] [CrossRef] [Green Version]
- Nguyen, D.H.; Khazaei, N. Multiagent Time-Delayed Fast Consensus Design for Distributed Battery Energy Storage Systems. IEEE Trans. Sustain. Energy 2019, 9, 1397–1406. [Google Scholar] [CrossRef]
- Liu, J.; He, D.; Wei, Q.; Yan, S. Energy Storage Coordination in Energy Internet Based on Multi-Agent Particle Swarm Optimization. Appl. Sci. 2018, 8, 1520. [Google Scholar] [CrossRef] [Green Version]
- Xu, D.; Zhang, W.; Jiang, B.; Shi, P.; Wang, S. Directed-Graph-Observer-Based Model-Free Cooperative Sliding Mode Control for Distributed Energy Storage Systems in DC Microgrid. IEEE Trans. Ind. Inform. 2019, 16, 1224–1235. [Google Scholar] [CrossRef]
- Bui, V.-H.; Hussain, A.; Kim, H.-M. A Multiagent-Based Hierarchical Energy Management Strategy for Multi-Microgrids Considering Adjustable Power and Demand Response. IEEE Trans. Smart Grid 2016, 9, 1323–1333. [Google Scholar] [CrossRef]
- Harmouch, F.Z.; Krami, N.; Hmina, N. A multiagent based decentralized energy management system for power exchange minimization in microgrid cluster. Sustain. Cities Soc. 2018, 40, 416–427. [Google Scholar] [CrossRef]
- Li, C.; Coelho, E.A.A.; Dragicevic, T.; Guerrero, J.M.; Vasquez, J.C. Multiagent-Based Distributed State of Charge Balancing Control for Distributed Energy Storage Units in AC Microgrids. IEEE Trans. Ind. Appl. 2016, 53, 2369–2381. [Google Scholar] [CrossRef] [Green Version]
- Chen, F.; Chen, M.; Li, Q.; Meng, K.; Guerrero, J.M.; Abbott, D. Multiagent-Based Reactive Power Sharing and Control Model for Islanded Microgrids. IEEE Trans. Sustain. Energy 2016, 7, 1232–1244. [Google Scholar] [CrossRef] [Green Version]
- Ghazvini, M.A.F.; Abedini, R.; Pinto, T.; Vale, Z. Multiagent System Architecture for Short-term Operation of Integrated Microgrids. IFAC Proc. Vol. 2014, 47, 6355–6360. [Google Scholar] [CrossRef] [Green Version]
- Zhao, T.; Ding, Z. Cooperative Optimal Control of Battery Energy Storage System Under Wind Uncertainties in a Microgrid. IEEE Trans. Power Syst. 2017, 33, 2292–2300. [Google Scholar] [CrossRef] [Green Version]
- Prabawa, P.; Choi, D.-H. Multi-Agent Framework for Service Restoration in Distribution Systems With Distributed Generators and Static/Mobile Energy Storage Systems. IEEE Access 2020, 8, 51736–51752. [Google Scholar] [CrossRef]
- Yang, L.; Xu, Y.; Sun, H.; Chow, M.; Zhou, J. A multiagent system based optimal load restoration strategy in distribution systems. Int. J. Electr. Power Energy Syst. 2021, 124, 106314. [Google Scholar] [CrossRef]
- Martin, R.; Christian, L.; Roland, Z.; Andreas, R.; Andrea, H.; Gunther, R. Smart Grid for Industry Using Multi-Agent Reinforcement Learning. Appl. Sci. 2020, 10, 6900. [Google Scholar]
- Morais, H.; Pinto, T.; Vale, Z.; Praça, I. Multilevel Negotiation in Smart Grids for VPP Management of Distributed Resources. IEEE Intell. Syst. 2012, 27, 8–16. [Google Scholar] [CrossRef] [Green Version]
- Amin, M.; Ballard, D. Defining new markets for intelligent agents. IT Prof. 2000, 2, 29–35. [Google Scholar] [CrossRef]
- Ramachandran, B.; Srivastava, S.K.; Edrington, C.S.; Cartes, D.A. An Intelligent Auction Scheme for Smart Grid Market Using a Hybrid Immune Algorithm. IEEE Trans. Ind. Electron. 2010, 58, 4603–4612. [Google Scholar] [CrossRef]
- Nunna, H.S.V.S.K.; Doolla, S. Energy Management in Microgrids Using Demand Response and Distributed Storage—A Multiagent Approach. IEEE Trans. Power Deliv. 2013, 28, 939–947. [Google Scholar] [CrossRef]
- Dimeas, A.; Hatziargyriou, N. Operation of a Multiagent System for Microgrid Control. IEEE Trans. Power Syst. 2005, 20, 1447–1455. [Google Scholar] [CrossRef]
- Nunna, H.S.V.S.K.; Doolla, S. Multiagent-Based Distributed-Energy-Resource Management for Intelligent Microgrids. IEEE Trans. Ind. Electron. 2012, 60, 1678–1687. [Google Scholar] [CrossRef]
- Kahrobaee, S.; Rajabzadeh, R.A.; Soh, L.-K.; Asgarpoor, S. A Multiagent Modeling and Investigation of Smart Homes With Power Generation, Storage, and Trading Features. IEEE Trans. Smart Grid 2012, 4, 659–668. [Google Scholar] [CrossRef] [Green Version]
- Logenthiran, T.; Srinivasan, D.; Khambadkone, A.M.; Aung, H.N. Multiagent System for Real-Time Operation of a Microgrid in Real-Time Digital Simulator. IEEE Trans. Smart Grid 2012, 3, 925–933. [Google Scholar] [CrossRef]
- Colson, C.M.; Nehrir, M.H.; Sharma, R.K.; Asghari, B. Improving Sustainability of Hybrid Energy Systems Part I: Incorporating Battery Round-Trip Efficiency and Operational Cost Factors. IEEE Trans. Sustain. Energy 2013, 5, 37–45. [Google Scholar] [CrossRef]
- Colson, C.M.; Nehrir, M.H.; Sharma, R.K.; Asghari, B. Improving Sustainability of Hybrid Energy Systems Part II: Managing Multiple Objectives With a Multiagent System. IEEE Trans. Sustain. Energy 2013, 5, 46–54. [Google Scholar] [CrossRef]
- Wu, T.; Xia, Y.; Wang, L.; Wei, W. Multiagent Based Distributed Control with Time-Oriented soc Balancing Method for DC Microgrid. Energies 2020, 13, 2793. [Google Scholar] [CrossRef]
- Nunna, H.S.V.S.K.; Sesetti, A.; Rathore, A.K.; Doolla, S. Multiagent-Based Energy Trading Platform for Energy Storage Systems in Distribution Systems With Interconnected Microgrids. IEEE Trans. Ind. Appl. 2020, 56, 3207–3217. [Google Scholar] [CrossRef]
- Jiang, W.; Yang, K.; Yang, J.; Mao, R.; Xue, N.; Zhuo, Z. A Multiagent-Based Hierarchical Energy Management Strategy for Maximization of Renewable Energy Consumption in Interconnected Multi-Microgrids. IEEE Access 2019, 7, 169931–169945. [Google Scholar] [CrossRef]
- Piwko, R.; Osborn, D.; Gramlich, R.; Jordan, G.; Hawkins, D.; Porter, K. Wind energy delivery issues [transmission planning and competitive electricity market operation. IEEE Power Energy Mag. 2005, 3, 47–56. [Google Scholar] [CrossRef]
- Poonpun, P.; Jewell, W.T. Analysis of the Cost per Kilowatt Hour to Store Electricity. IEEE Trans. Energy Convers. 2008, 23, 529–534. [Google Scholar] [CrossRef]
- Zhou, C.; Qian, K.; Allan, M.; Zhou, W. Modeling of the Cost of EV Battery Wear Due to V2G Application in Power Systems. IEEE Trans. Energy Convers. 2011, 26, 1041–1050. [Google Scholar] [CrossRef]
- Abdeltawab, H.H.; Mohamed, Y.A.-R.I.; Ibrahim, Y. Market-Oriented Energy Management of a Hybrid Wind-Battery Energy Storage System Via Model Predictive Control with Constraint Optimizer. IEEE Trans. Ind. Electron. 2015, 62, 6658–6670. [Google Scholar] [CrossRef]
- Perez, E.; Beltran, H.; Aparicio, N.; Rodriguez, P. Predictive Power Control for PV Plants with Energy Storage. IEEE Trans. Sustain. Energy 2012, 4, 482–490. [Google Scholar] [CrossRef] [Green Version]
- Eyer, J.; Corey, G. Energy Storage for the Electricity Grid: Benefits and Market Potential Assessment Guide; Sandia National Laboratories: Albuquerque, NM, USA, 2010. [Google Scholar]
- Pedrycz, W.; Gomide, F. Fuzzy Systems Engineering Toward Human-Centric Computing; Wiley: Hoboken, NJ, USA, 2007. [Google Scholar]
- Jang, J.-S.R. ANFIS: Adaptive-network-based fuzzy inference system. IEEE Trans. Syst. Man Cybern. 1993, 23, 665–685. [Google Scholar] [CrossRef]
- Wang, Z.; Wang, L. Adaptive Negotiation Agent for Facilitating Bi-Directional Energy Trading Between Smart Building and Utility Grid. IEEE Trans. Smart Grid 2013, 4, 702–710. [Google Scholar] [CrossRef]
- Atwa, Y.M. Distribution System Planning and Reliability Assessment under High DG Penetration. Ph.D. Thesis, University of Waterloo, Waterloo, ON, Canada, 2010. [Google Scholar]
- Lopez, E.; Opazo, H.; Garcia, L.; Bastard, P. Online Reconfiguration Considering Variability Demand: Applications to Real Networks. IEEE Trans. Power Syst. 2004, 19, 549–553. [Google Scholar] [CrossRef]
- AESO. Historical Pool Price for Alberta. 2000. Available online: http://ets.aeso.ca/ (accessed on 15 September 2020).
- Xu, D.Q.; Joós, G.; Levesque, M.; Maier, M. Integrated V2G, G2V, and Renewable Energy Sources Coordination Over a Converged Fiber-Wireless Broadband Access Network. IEEE Trans. Smart Grid 2013, 4, 1381–1390. [Google Scholar]
- Löfberg, J. YALMIP. Available online: https://yalmip.github.io/ (accessed on 6 October 2020).










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Weather | ||||
|---|---|---|---|---|
| Trade History | ||||
| Low revenue () | Low1 | Low2 | Medium3 | |
| Medium revenue () | Low3 | Medium2 | High2 | |
| High revenue () | Medium1 | High1 | High3 | |
| Strategy | ESS-Agent | RES-Agent |
|---|---|---|
| Anxious | ||
| Cool-headed | ||
| Greedy (frugal) |
| Ratings | ||||||||
|---|---|---|---|---|---|---|---|---|
| Storage plans | Symbol | |||||||
| Plan | ||||||||
| DNC | 1 | 1 | 1 | 1 | 1 | 2 | ||
| DOD | 0.5 | 0.55 | 0.6 | 0.65 | 0.7 | 0.5 | ||
| RES agent | Bargaining strategy | Trade history | Profitability rank | Distance rank | ||||
| DS1 | DS2 | DS1 | DS2 | DS1 | DS2 | |||
| WT1 | Cool-headed | Med | Med | 3 | 2 | 2 | 2 | |
| WT2 | Greedy | Low | Low | 5 | 3 | 1 | 3 | |
| WT3 | Anxious | High | High | 1 | 1 | 4 | 5 | |
| PV1 | Cool-headed | Med | Low | 4 | 5 | 5 | 1 | |
| PV2 | anxious | high | low | 2 | 4 | 3 | 4 | |
| ESS-Agent | Trading List Order | Best Storage Plan | Net Profit $ {Min Expected Max} | |
|---|---|---|---|---|
| DS1 | WT2 | {$1157.6 $1210.6 $1268.7} | 35.5% | |
| WT1 | {$507 $538 $567.1} | 39.96% | ||
| PV2 | {$202.8 $218.5 $232.6} | 44.81% | ||
| WT3 | Non | {−$89 −$83.4 −$81} | Failure trade | |
| PV2 | Non | {−$89 −$83.4 −$81} | Failure trade | |
| DS2 | PV1 | Non | {−$70.9 −$70.7 −$69.9} | Failure trade |
| WT1 | {$420.7 $462.26 $445.68} | 39.96% | ||
| WT2 | Non | {−$103 −$98 −$96.3} | Failure trade | |
| PV2 | Non | {−$103 −$98 −$96.3} | Failure trade | |
| WT3 | Non | {−$103 −$98 −$96.3} | Failure trade |
| ESS-Agent | Trading List Order | Best Storage Plan | Net Profit $ {Min Expected Max} | |
|---|---|---|---|---|
| DS1 | WT2 | {$1368.6 $1436.3 $1368.6} | 35.5% | |
| WT1 | {$637.4 $667.3 $693.9} | 39.96% | ||
| PV2 | {$259.8 $280.15 $298.2} | 44.81% | ||
| WT3 | Non | Full capacity is reached | Failure trade | |
| PV2 | Non | Full capacity is reached | Failure trade | |
| DS2 | PV1 | Non | {−$70.9 −$70.7 −$69.9} | Failure trade |
| WT1 | {$610.7 $641.3 $664.9} | 39.96% | ||
| WT2 | Non | {−$103 −$98 −$96.3} | Failure trade | |
| PV2 | Non | {−$103 −$98 −$96.3} | Failure trade | |
| WT3 | Non | {−$103 −$98 −$96.3} | Failure trade |
| ESS-Agent | Trading List Order | Best Storage Plan | Net Profit $ {Min Expected Max} | |
|---|---|---|---|---|
| DS1 | WT3 | {$1368.6 $1436.3 $1491.6} | 44.81% | |
| PV2 | {$371.7 $410.29 $430.50} | 44.81% | ||
| WT1 | {$393.6 $418.14 $436.15} | 39.96% | ||
| WT2 | Non | {−$289 −$283.4 −$281} | Failure trade | |
| PV1 | Non | {−$289 −$283.4 −$281} | Failure trade | |
| DS2 | WT3 | Non | {−$70.9 −$70.7 −$69.9} | Failure trade |
| WT1 | {$420.7 $462.26 $445.68} | 44.81% | ||
| WT2 | Non | {−$103 −$98 −$96.3} | Failure trade | |
| PV2 | Non | {−$103 −$98 −$96.3} | Failure trade | |
| PV1 | Non | {−$103 −$98 −$96.3} | Failure trade |
| ESS-Agent | Trading List Order | Best Storage Plan | Net Profit $ {Min Expected Max} | |
|---|---|---|---|---|
| DS1 | WT3 | {$1368.6 $1436.3 $1491.6} | 44.81% | |
| PV2 | {$496.8 $530.89 $560.62} | 44.81% | ||
| WT1 | {$393.6 $418.14 $436.15} | 39.96% | ||
| WT2 | Non | Full capacity is reached | Failure trade | |
| PV1 | Non | Full capacity is reached | Failure trade | |
| DS2 | WT3 | Non | {−$70.9 −$70.7 −$69.9} | Failure trade |
| WT1 | {$610.7 $641.3 $664.9} | 44.81% | ||
| WT2 | Non | {−$103 −$98 −$96.3} | Failure trade | |
| PV2 | Non | {−$103 −$98 −$96.3} | Failure trade | |
| PV1 | Non | {−$103 −$98 −$96.3} | Failure trade |
| Trading Strategy | ||
|---|---|---|
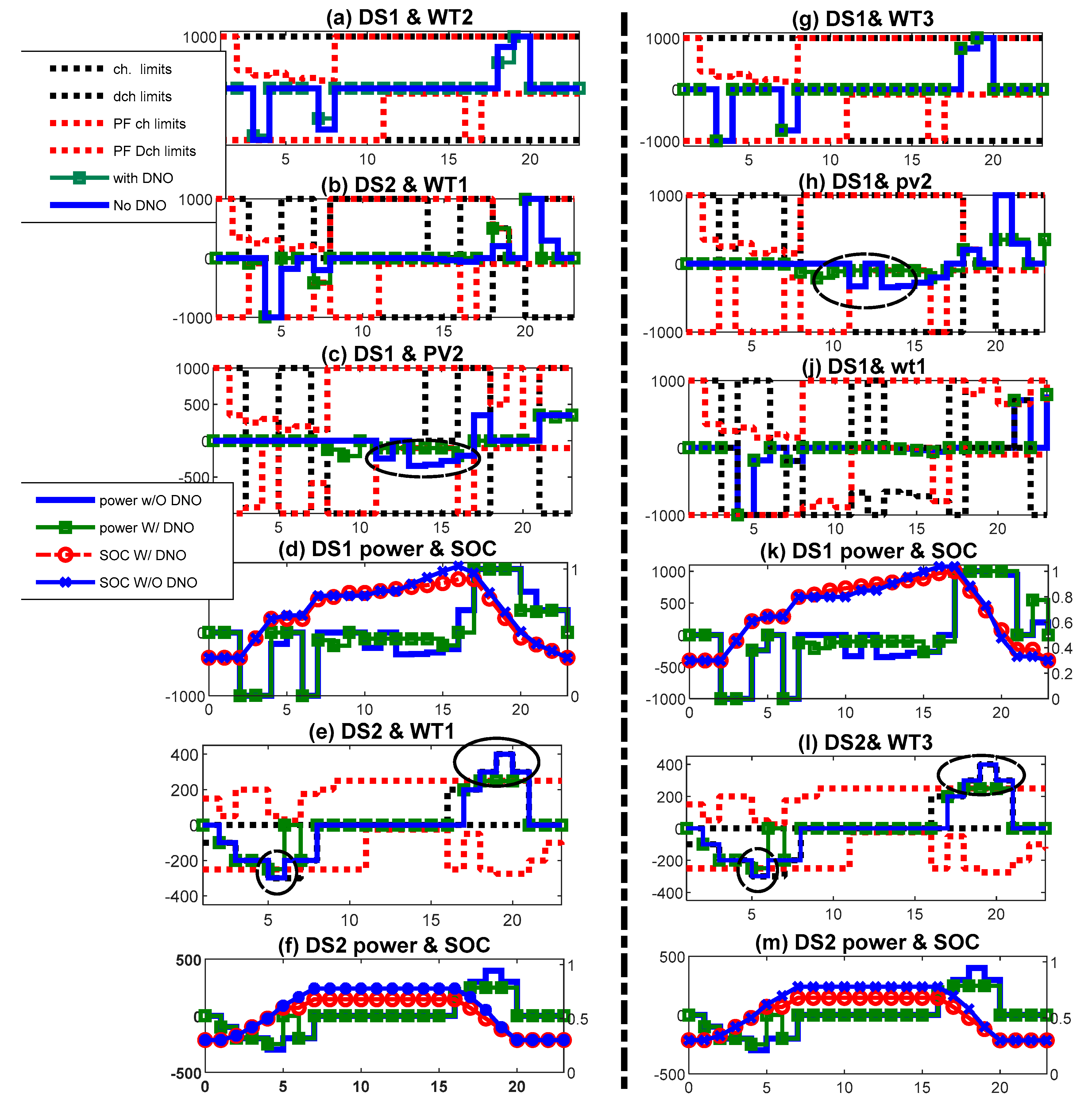
| Distance rank—with DNO and ESS power limits | $742.65 | $184.72 |
| Distance rank—without DNO and no ESS power limits | $902 | $256.14 |
| Profitability rank—with DNO and ESS power limits | $994.54 | $207.138 |
| Profitability rank—without DNO and no ESS power limits | $1048.58 | $287.36 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abdeltawab, H.M.; Mohamed, Y.A.I. Distributed Battery Energy Storage Co-Operation for Renewable Energy Sources Integration. Energies 2020, 13, 5517. https://doi.org/10.3390/en13205517
Abdeltawab HM, Mohamed YAI. Distributed Battery Energy Storage Co-Operation for Renewable Energy Sources Integration. Energies. 2020; 13(20):5517. https://doi.org/10.3390/en13205517
Chicago/Turabian StyleAbdeltawab, Hussein M., and Yasser A. I. Mohamed. 2020. "Distributed Battery Energy Storage Co-Operation for Renewable Energy Sources Integration" Energies 13, no. 20: 5517. https://doi.org/10.3390/en13205517