Model Predictive Control for Virtual Synchronous Generator with Improved Vector Selection and Reconstructed Current


Abstract
:
1. Introduction
- (1)
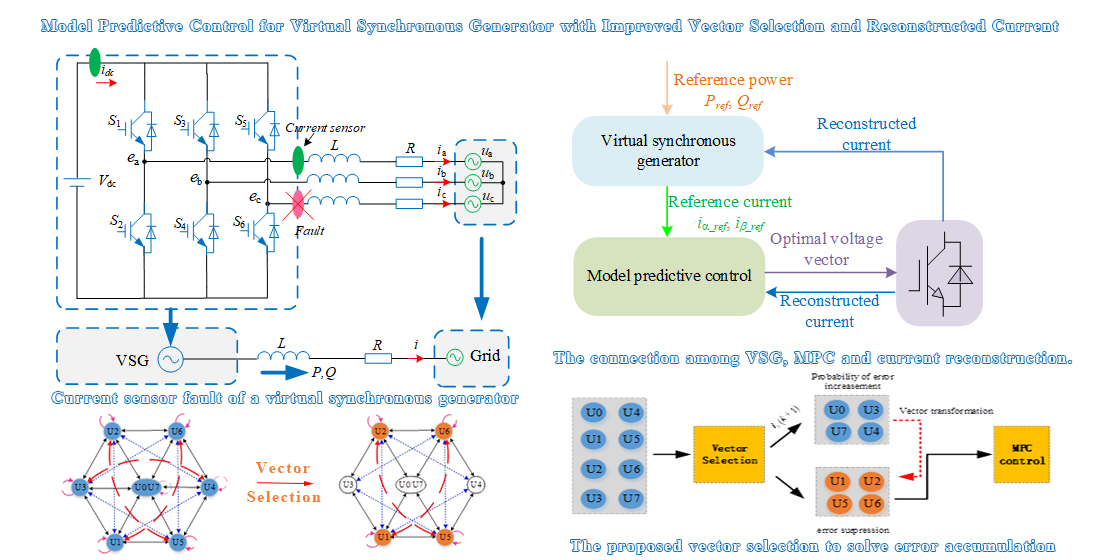
- The MPC method is applied to VSG control to achieve the effectiveness control of the three-phase converter and improve the response capability for changes of grid frequency and voltage, which is flexible and simple without PWM and a PI controller.
- (2)
- The reconstructed current, based on the relationship of the dc current, ac current, and the voltage vectors, is used for MPC-VSG, which needs less current sensors and improves the fault-tolerant capability of the three-phase converter.
- (3)
- In order to improve the accuracy of current reconstruction, an improved voltage selection method is proposed for MPC-VSG, which can reduce the error of current reconstruction.
2. Models of VSG, MPC, and Current Reconstruction
2.1. Model of VSG
2.2. Predictive Current Model
2.3. Current Reconstruction Model
3. The Proposed MPC-VSG Method
3.1. Improved Voltage Vector Selection
3.2. The Proposed MPC-VSG Control Structure
4. Experimental Verification
4.1. Current Reconstruction
4.2. Active Power with Frequency Regulation
4.3. Reactive Power with Voltage Regulation
5. Conclusions
- (1)
- The grid-connected converter under the control of the proposed method can adjust the output active or reactive power with the sinusoidal current to support the grid.
- (2)
- The reconstructed current was analyzed, and the approach to relieving the increase of the error caused by continuously selecting the same type of vectors was detailed.
- (3)
- By applying the proposed MPC, the robustness of the power system with a high-penetration level was enhanced due to the continuous operation ability after current-sensor fault.
Author Contributions
Funding
Conflicts of Interest
References
- Sun, K.; Wang, X.; Li, Y.W.; Nejabatkhah, F.; Mei, Y.; Lu, X. Parallel Operation of Bidirectional Interfacing Converters in a Hybrid AC/DC Microgrid Under Unbalanced Grid Voltage Conditions. IEEE Trans. Power Electron. 2017, 32, 1872–1884. [Google Scholar] [CrossRef]
- Vekhande, V.; Kanakesh, V.K.; Fernandes, B.G. Control of Three-Phase Bidirectional Current-Source Converter to Inject Balanced Three-Phase Currents Under Unbalanced Grid Voltage Condition. IEEE Trans. Power Electron. 2016, 31, 6719–6737. [Google Scholar] [CrossRef]
- Wang, F.; Zhang, L.; Feng, X.; Guo, H. An Adaptive Control Strategy for Virtual Synchronous Generator. IEEE Trans. Ind. Appl. 2018, 54, 5124–5133. [Google Scholar] [CrossRef]
- Wu, H.; Ruan, X.; Yang, D.; Chen, X.; Zhao, W.; Lv, Z.; Zhong, Q. Small-Signal Modeling and Parameters Design for Virtual Synchronous Generators. IEEE Trans. Ind. Electron. 2016, 63, 4292–4303. [Google Scholar] [CrossRef]
- Magdy, G.; Shabib, G.; Elbaset, A.A.; Mitani, Y. Renewable power systems dynamic security using a new coordination of frequency control strategy based on virtual synchronous generator and digital frequency protection. Int. J. Elec. Power. 2019, 109, 351–368. [Google Scholar] [CrossRef]
- Meng, X.; Liu, J.; Liu, Z. A Generalized Droop Control for Grid-Supporting Inverter Based on Comparison Between Traditional Droop Control and Virtual Synchronous Generator Control. IEEE Trans. Power Electron. 2019, 34, 5416–5438. [Google Scholar] [CrossRef]
- Fang, J.; Tang, Y.; Li, H.; Li, X. A Battery/Ultracapacitor Hybrid Energy Storage System for Implementing the Power Management of Virtual Synchronous Generators. IEEE Trans. Power Electron. 2018, 33, 2820–2824. [Google Scholar] [CrossRef]
- Wang, S.; Hu, J.; Yuan, X.; Sun, L. On Inertial Dynamics of Virtual-Synchronous-Controlled DFIG-Based Wind Turbines. IEEE Trans. Energy Convers. 2015, 30, 1691–1702. [Google Scholar] [CrossRef]
- Fathi, A.; Shafiee, Q.; Bevrani, H. Robust Frequency Control of Microgrids Using an Extended Virtual Synchronous Generator. IEEE Trans. Power Syst. 2018, 33, 6289–6297. [Google Scholar] [CrossRef]
- Ma, Y.; Cao, W.; Yang, L.; Wang, F.; Tolbert, L.M. Virtual Synchronous Generator Control of Full Converter Wind Turbines with Short-Term Energy Storage. IEEE Trans. Ind. Electron. 2017, 64, 8821–8831. [Google Scholar] [CrossRef]
- Cao, Y.; Wang, W.; Li, Y.; Tan, Y.; Chen, C.; He, L.; Häger, U.; Rehtanz, C. A Virtual Synchronous Generator Control Strategy for VSC-MTDC Systems. IEEE Trans. Energy Convers. 2018, 33, 750–761. [Google Scholar] [CrossRef]
- Chen, J.; Donnell, T.O. Parameter Constraints for Virtual Synchronous Generator Considering Stability. IEEE Trans. Power Syst. 2019, 34, 2479–2481. [Google Scholar] [CrossRef]
- Guo, L.; Jin, N.; Gan, C.; Luo, K. Hybrid Voltage Vector Preselection-Based Model Predictive Control for Two-Level Voltage Source Inverters to Reduce the Common-Mode Voltage. IEEE Trans. Ind. Electron. 2020, 67, 4680–4691. [Google Scholar] [CrossRef]
- Young, H.A.; Perez, M.A.; Rodriguez, J. Analysis of Finite-Control-Set Model Predictive Current Control with Model Parameter Mismatch in a Three-Phase Inverter. IEEE Trans. Ind. Electron. 2016, 63, 3100–3107. [Google Scholar] [CrossRef]
- Liu, Y.; Abu-Rub, H.; Xue, Y.; Tao, F. A Discrete-Time Average Model-Based Predictive Control for a Quasi-Z-Source Inverter. IEEE Trans. Ind. Electron. 2018, 65, 6044–6054. [Google Scholar] [CrossRef]
- Nguyen, H.T.; Jung, J. Disturbance-Rejection-Based Model Predictive Control: Flexible-Mode Design with a Modulator for Three-Phase Inverters. IEEE Trans. Ind. Electron. 2018, 65, 2893–2903. [Google Scholar] [CrossRef]
- Xiao, X.; Zhang, Y.; Wang, J.; Du, H. An Improved Model Predictive Control Scheme for the PWM Rectifier-Inverter System Based on Power-Balancing Mechanism. IEEE Trans. Ind. Electron. 2016, 63, 5197–5208. [Google Scholar] [CrossRef]
- Kim, S.; Jang, Y.; Kim, R. Modeling and Hierarchical Structure Based Model Predictive Control of Cascaded Flying Capacitor Bridge Multilevel Converter for Active Front-End Rectifier in Solid-State Transformer. IEEE Trans. Ind. Electron. 2019, 66, 6560–6569. [Google Scholar] [CrossRef]
- Zhang, Z.; Fang, H.; Gao, F.; Rodríguez, J.; Kennel, R. Multiple-Vector Model Predictive Power Control for Grid-Tied Wind Turbine System with Enhanced Steady-State Control Performance. IEEE Trans. Ind. Electron. 2017, 64, 6287–6298. [Google Scholar] [CrossRef]
- Guo, X.; Ren, H.; Li, J. Robust Model-Predictive Control for a Compound Active-Clamp Three-Phase Soft-Switching PFC Converter Under Unbalanced Grid Condition. IEEE Trans. Ind. Electron. 2018, 65, 2156–2166. [Google Scholar] [CrossRef]
- Falkowski, P.; Sikorski, A. “Finite Control Set Model Predictive Control for Grid-Connected AC–DC Converters with LCL Filter. IEEE Trans. Ind. Electron. 2018, 65, 2844–2852. [Google Scholar] [CrossRef]
- Li, X.; Zhang, H.; Shadmand, M.B.; Balog, R.S. Model Predictive Control of a Voltage-Source Inverter with Seamless Transition Between Islanded and Grid-Connected Operations. IEEE Trans. Ind. Electron. 2017, 64, 7906–7918. [Google Scholar] [CrossRef]
- Lu, J.; Zhang, X.; Hu, Y.; Liu, J.; Gan, C.; Wang, Z. Independent Phase Current Reconstruction Strategy for IPMSM Sensorless Control Without Using Null Switching States. IEEE Trans. Ind. Electron. 2018, 65, 4492–4502. [Google Scholar] [CrossRef] [Green Version]
- Sun, Q.; Wu, J.; Gan, C.; Hu, Y.; Jin, N.; Guo, J. A New Phase Current Reconstruction Scheme for Four-Phase SRM Drives Using Improved Converter Topology Without Voltage Penalty. IEEE Trans. Ind. Electron. 2018, 65, 133–144. [Google Scholar] [CrossRef]
- Gan, C.; Wu, J.; Yang, S.; Hu, Y. Phase Current Reconstruction of Switched Reluctance Motors From DC-Link Current Under Double High-Frequency Pulses Injection. IEEE Trans. Ind. Electron. 2015, 62, 3265–3276. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Dusmez, S.; Akin, B.; Rajashekara, K. A New SVPWM for the Phase Current Reconstruction of Three-Phase Three-level T-type Converters. IEEE Trans. Power Electron. 2016, 31, 2627–2637. [Google Scholar] [CrossRef]
- Song, S.; Xia, Z.; Fang, G.; Ma, R.; Liu, W. Phase Current Reconstruction and Control of Three-Phase Switched Reluctance Machine with Modular Power Converter Using Single DC-Link Current Sensor. IEEE Trans. Power Electron. 2018, 33, 8637–8649. [Google Scholar] [CrossRef]
- Xu, Y.; Yan, H.; Zou, J.; Wang, B.; Li, Y. Zero Voltage Vector Sampling Method for PMSM Three-Phase Current Reconstruction Using Single Current Sensor. IEEE Trans. Power Electron. 2017, 32, 3797–3807. [Google Scholar] [CrossRef]
- Zhong, Q.; Weiss, G. Synchronverters: Inverters That Mimic Synchronous Generators. IEEE Trans. Ind. Electron. 2011, 58, 1259–1267. [Google Scholar] [CrossRef]
- Lu, J.; Hu, Y.; Zhang, X.; Wang, Z.; Liu, J.; Gan, C. High-Frequency Voltage Injection Sensorless Control Technique for IPMSMs Fed by a Three-Phase Four-Switch Inverter with a Single Current Sensor. IEEE/ASME Trans. Mech. 2018, 23, 758–768. [Google Scholar] [CrossRef]
- Ha, J. Voltage Injection Method for Three-Phase Current Reconstruction in PWM Inverters Using a Single Sensor. IEEE Trans. Power Electron. 2009, 24, 767–775. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Voltage Vector | DC Current idc | The Current of Phase A iar | The Reconstructed Current of Phase B ibr | The Reconstructed Current of Phase C icr |
|---|---|---|---|---|
| U0(0 0 0) | 0 | ia | ib(k + 1) | −iar − ibr |
| U1(0 0 1) | ic | ia | −iar − icr | idc |
| U2(0 1 0) | ib | ia | idc | −iar − ibr |
| U3(0 1 1) | −ia | ia | ib(k + 1) | −iar − ibr |
| U4(1 0 0) | ia | ia | ib(k + 1) | −iar − ibr |
| U5(1 0 1) | −ib | ia | −idc | −iar − ibr |
| U6(1 1 0) | −ic | ia | −iar − icr | −idc |
| U7(1 1 1) | 0 | ia | ib(k + 1) | −iar − ibr |
| Parameter | Symbol | Value |
|---|---|---|
| dc voltage | Vdc/V | 400 |
| Filter inductor | L/mH | 10 |
| Line resistance | R/Ω | 0.2 |
| Grid phase voltage | u/V | 110 |
| Grid frequency | f/Hz | 50 |
| Sampling frequency | fs/kHz | 10 |
| Frequency regulation coefficient | Dp | 5 |
| Voltage regulation coefficient | Dq | 100 |
| Inertia coefficient | J | 0.0122 |
| Proportionality coefficient | K | 740.1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jin, N.; Pan, C.; Li, Y.; Hu, S.; Fang, J. Model Predictive Control for Virtual Synchronous Generator with Improved Vector Selection and Reconstructed Current. Energies 2020, 13, 5435. https://doi.org/10.3390/en13205435
Jin N, Pan C, Li Y, Hu S, Fang J. Model Predictive Control for Virtual Synchronous Generator with Improved Vector Selection and Reconstructed Current. Energies. 2020; 13(20):5435. https://doi.org/10.3390/en13205435
Chicago/Turabian StyleJin, Nan, Chao Pan, Yanyan Li, Shiyang Hu, and Jie Fang. 2020. "Model Predictive Control for Virtual Synchronous Generator with Improved Vector Selection and Reconstructed Current" Energies 13, no. 20: 5435. https://doi.org/10.3390/en13205435