OPF is a well-defined classical problem and has been investigated by many researchers since its first introduction (see e.g., [
21]),
where
is the vector containing the real power provided by all generators, which can also be treated as the “control variable” in the problem,
is the vector containing voltage phasors at all buses in the system, which can also be treated as the “state variable". It is worth noting that once the state variable
are known, the control variable
can be calculated from the constraint Equation (1b). Equation (1c) is the inequality constraints describing voltage magnitude limits, line current limits, transmission line limits, generator capacity limits and so on.
2.1. Standard OPF Formulation
In this subsection, we present a detailed formulation of problem (
1a). We denote
nodes as the set of buses and
as set of power flow lines between
N nodes to represent an electrical network with
N nodes. We denote
as the injection current at bus
and
as the voltage at bus
. Let
and
denote the complex power demand and the complex power generated by bus
, respectively. Hence, the complex power
flow into bus
k is given as
. The complex form of current phasor on line
is
and the complex power transferred from bus
m to the rest of the network is
. The admittance matrix
of the network is given as
where
is the admittance on the transmission line
, and
is the line-to-ground admittance at bus
m. We denote
and
as the real and imaginary parts of
, respectively. In particular,
and
and
. Then, the detailed OPF problem formulation can be expressed as follows (see also [
20]),
We denote the cost of generators at bus
k as
, and the variables are
,
,
,
,
,
,
,
, and
,
,
,
for
. The constraint (3b) is from
, the constraint (3c) is from the law of the conservation of power flow, the constraint (3d) is from that
, the constraint (3e) is from that the complex power is
, and
with
and
, and constraint (3f) is from that
and
. Note that constraints (3b)–(3f) are imposed by Kirchhoff’s laws associated with the physical structure of electrical network. In addition, constraints (3g)–(3l) are the constraints imposed by system operating limits, where the lower bound data
and the upper bound data
define the feasible intervals of power, current and voltages in the network. Note that if there is no power generation at a bus
k then it is not a generator bus, and hence
. Then these situations can be formulated as follows:
The constraints (3e), (3f) and (3l) are nonconvex, which render the entire optimization problem (3) nonconvex. The problem is an NP-hard problem and the complexity grows with the size of the system. Thus, it is generally difficult to achieve global optimality using standard method.
2.2. Decomposed OPF Formulation
For simplicity and without loss of generality, we formulate the original problem (
1a) with slack variables introduced as a multi-variable single objective optimization problem with both equality and inequality constraints as follows,
where
and
are the same as in problem (
1a), and
is the vector containing all slack variables which are introduced to allow imbalance between the input and output power at buses or violation of transmission line limits or generator capacity. It is worth noting that once the state variable
and the slack variable
are known, the control variable
can be calculated from the constraint Equation (5b). The objective function,
, is composed of two parts: (1) the generation costs
at the base case; and (2) the penalty for slack variables (i.e.,
) in the base case. Equation (5c) gives the inequality constraints describing voltage magnitude limits, line current limits, transmission line limits, generator capacity limits and so on. Slack variables were also introduced to allow for violations, but penalty was added, which is reflected in
and
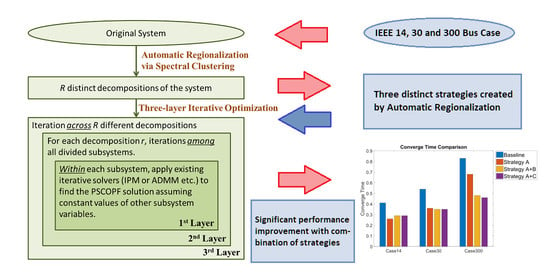
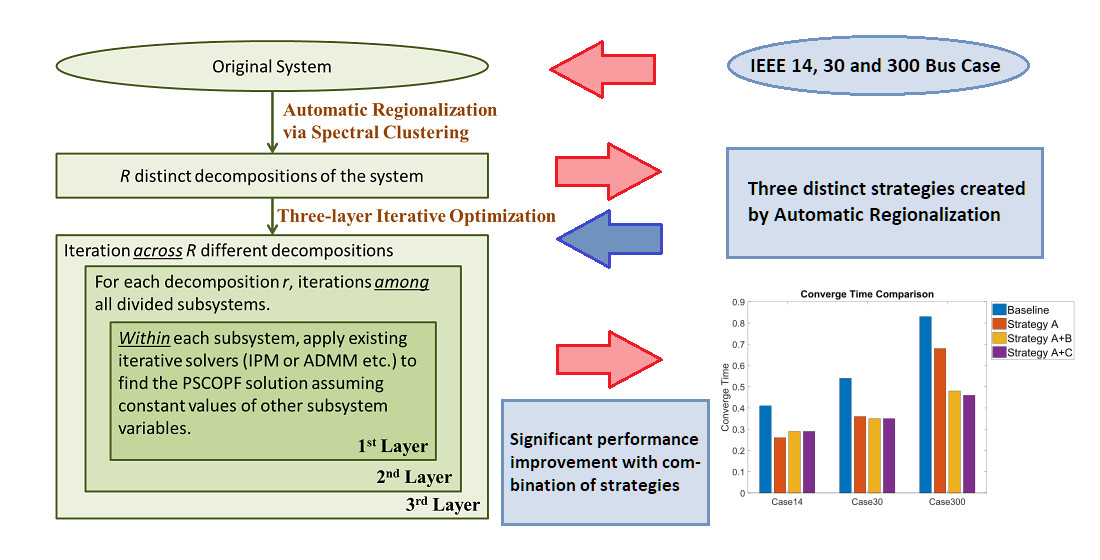
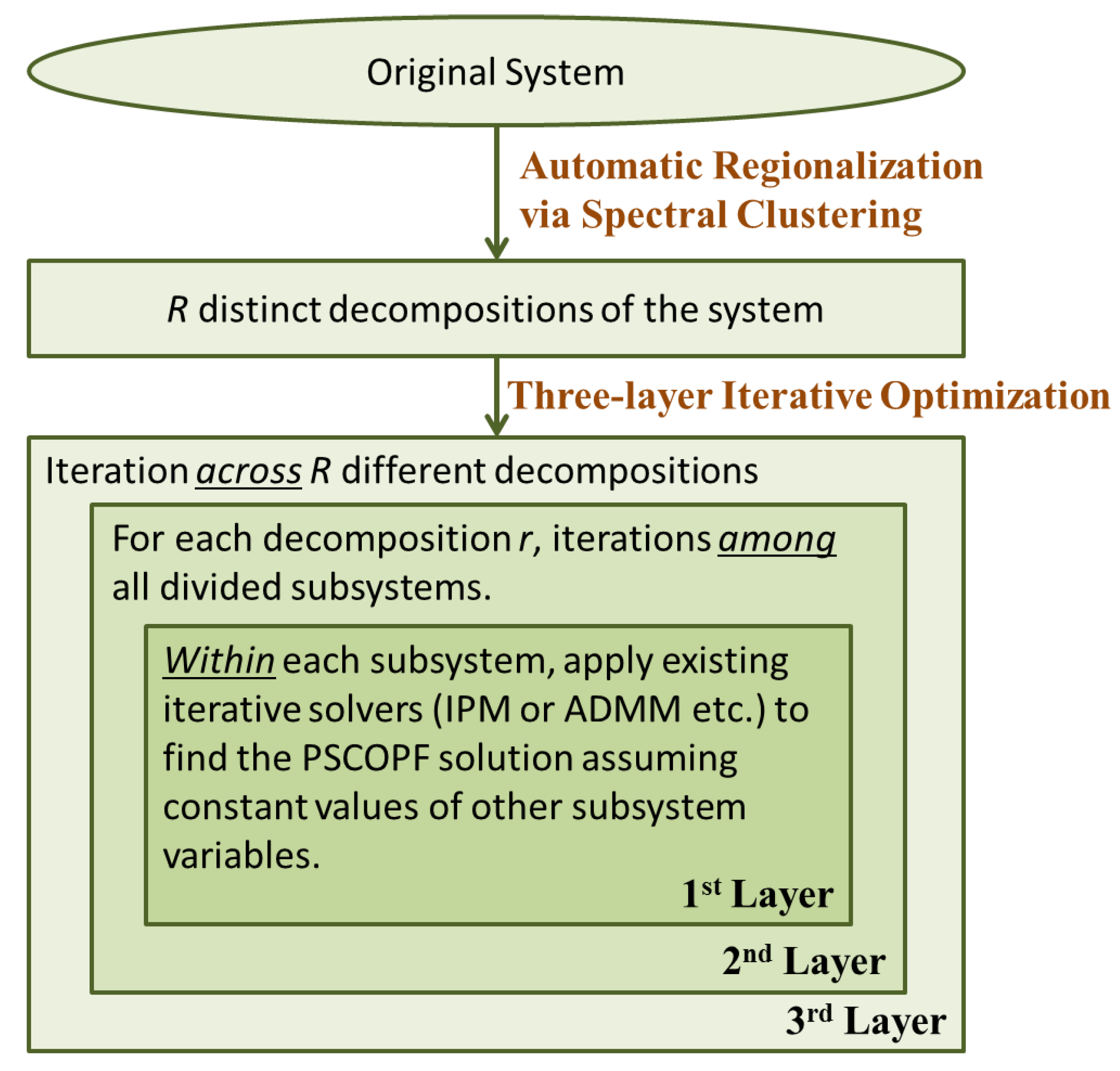
.The original system was decomposed into several subsystems using the proposed automatic regionalization technique. Notice that several distinct decompositions were provided by the regionalization technique. For a given decomposition, we conducted iterative search among the subsystems. Once it converged and the cost function cannot be further reduced under this decomposition, then we try to work on another decomposition to obtain a better solution. The key is to handle the iterative process at the second layer, which includes the formulation of subsystem optimizations and the iterations among them.
For a given regionalization strategy r with K subsystems in total, we can divide the related variables in the original problem into by reorganizing and combining variables in the same subsystem together. For subsystem k in the i-th iteration, we treat only the variables in that subsystem as unknown and all other variables as known constants using their current values , , .
Then, we plug in those variables into Equations (
5a)–(5e) and solve for the optimal solution at the current iteration to obtain
. Notice that with this formulation: (1) the objective function is unchanged for the entire iteration process; (2) for each iteration, the number of unknown variables is much smaller; and (3) the number of constraint equations is also greatly reduced since most constraints in the original problem will not contain the variables for the subsystem under iteration.
The proposed idea is similar to the many decomposed optimization techniques such as ADMM, conjugate gradient search etc., in the sense that for each iteration, it only searches along a subspace of the unknowns. The difference is that it decomposes the problem by the topology of power systems and utilizes the weak coupling among subsystems. Note from constraint (3b) that the current of each bus is associated with the voltage of itself and its neighboring buses. Hence, constraint (3b) will introduce coupling between adjacent buses. To decouple constraint (3b), we introduce consistency constraints by making each save a copy of each adjacent bus’s voltage and force them to be equal in value.
To formulate the concept above, we denote
as the set of bus
k itself and its adjacent buses, i.e.,
. Copies of real and imaginary parts of the voltages corresponding to buses in
is denoted by
and
, respectively. We then denote
and
as real and imaginary net variables, respectively. The consistency constraints are formulated as follows:
where
is given by
Note that (
6) is the variable assignment for the net variable copies, for any bus
k, either
or
is local and depend only on adjacent buses.
The constraints (3b)–(3l) then can be written by using local variables
and
. Accordingly, we can list them as follows,
where
,
,
, and
, where
, with the same order as in
and
. In addition,
(or
) in constraint (
8a) are acquired from the
k-th column of
(respectively,
) and then extracting the rows corresponding to the buses in
with the same order as in
and
. Accordingly,
and
in constraint (8c) are constructed as follows
We substitue constraints (
8a)–(8c) as
, the nonlinear equality constraint (8d) as
, the nonlinear equality constraint (8e) as
the linear convex inequality constraints (8f), (8g) and (8j) as
, and the nonlinear convex inequality constraints (8h) and (8i) as
. Then, we can rewrite the decomposed formulation of problem (3) as follows,
where the variables are
,
,
,
,
,
,
,
,
,
,
,
,
for
and
and
. Note that (11f) gives the constructed consistency constraints, which define the consistency voltages among adjacent buses. The coupling in the original centralized formulation (3) has been guaranteed in the consistency constraint (11f) so that decomposition methods can be applied without changing the global objective function.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}