1. Introduction
Virtual synchronous generator (VSG) control simulates the dynamic droop characteristic and steady-state droop characteristic of the synchronous generator, which adjusts the voltage amplitude and frequency by means of calculating the reactive power and active power separately. It has been widely used in the applications of the microgrid because of its strong frequency inertia and power self-regulation ability [
1,
2,
3,
4,
5,
6,
7,
8]. However, the performance of the VSG control mainly relies on the inductive line impedance of the distributed generator (DG) units. Meanwhile, its voltage block lacks sufficient inertia [
9,
10,
11]. When large power fluctuations occur in the microgrid, the voltages of the DG units will be easily affected by the power fluctuations, resulting in the fluctuations of the voltages, and if the line impedance reflects the characteristics of resistance and inductance, there is a strong coupling in the DG unit. Therefore, the adjustment precision of the power of the VSG control will be easily affected by the coupling. As a result, dynamic performance and microgrid power distribution cannot be obtained well [
12,
13].
Virtual impedance can reduce the coupling of VSG control to a certain extent [
14,
15,
16]. It reflects the real situation to a certain extent, which allows the coupling of the DG unit to be adjusted by setting the appropriate value of the virtual impedance.
Although the coupling of the DG units can be decreased by changing the characteristic of the virtual impedance, the differential equations in the virtual impedance cannot suppress the voltage fluctuation caused by the power fluctuations. That is the reason why the voltage inertia of the VSG control cannot be enhanced by this method, and the excitation block also has no strong inertia in VSG control.When the power fluctuations occur in the microgrid, the voltage in the VSG control will be easily affected by power fluctuations through the excitation block and virtual impedance block. Therefore, the stability of the DG device will be reduced, and the high-frequency noise and virtual impedance generated by the excitation block can easily affect the voltage quality of the DG device. In fact, the inertia equation can be adopted to decrease the influence of the power fluctuations and suppress the effect of the high frequency noises. In [
17], a method of using first-order inertia to suppress the influence of high-frequency noise was proposed. However, the influence of the coupling is not considered in this method, resulting in low dynamic performance of the voltage-source converters. In [
18], it was proposed to use first-order inertia and virtual output impedance in the VSG control, but did not consider the impact of power fluctuations on the control system through the virtual impedance. In [
19], a first-order inertia is introduced into the excitation block and virtual impedance. It enhances the inertia of the voltage and reduces the influence of the high frequency noises from the excitation block and virtual impedance. In [
20], a first-order inertia is introduced into the virtual impedance to suppress the influence of the high frequency noises. Meanwhile, the influence of the fluctuations from virtual impedance on voltage can also be decreased. Although the first-order inertia in these papers can enhance the inertia of the voltage in some extent, and it can also filter out the high frequency noises, its inertia and filtering performance are greatly limited by the stability of the DG units adopting the VSG control.
In order to solve the disadvantages of the dynamic performance of VSG control and the poor accuracy of microgrid power distribution, and realize the stable power regulation of DG units, this paper proposes an improved VSG control that combines voltage inertia and virtual impedance. The voltage inertia in the improved VSG control is the second-order voltage inertia. Compared to the first-order inertia, it can further improve the voltage inertia and the filtering ability. The influence of DG unit coupling can be adjusted by increasing the virtual reactance. Meanwhile, proposed method in this article can achieve the same effect without additional power electronic equipment, which means that the cost of hardware can be effectively reduced. The rest of this paper is organized as follows. In
Section 2, the structure of the VSG control and the comparative experimental results between the first-order inertia and second-order inertia are presented. Then, with the given condition that the improved VSG control incorporating voltage inertia and virtual impedance. Stability analysis of the DG units adopting the improved VSG control and experimental results are presented in
Section 3. Finally, conclusions are presented in
Section 4.
3. Stability Analysis and Experiment
The connection model of the microgrid is shown in the
Figure 3. In the
Figure 3, it comprises batteries based DG units (DG1 and DG2), a photovoltaic based DG unit (DG3), a grid, and a load.
(
, 2) is the output voltage of the DG unit, and
represents the voltage at the common coupling point.
and
(
, 2, 3) are the filter inductors and filter capacitors, respectively.
(
, 2) is expressed as line resistance and
(
, 2) is expressed as line reactance. The DG3 adopts the rectifier controller [
25], and it is a good method to get the reference voltage through maximum power point tracking (MPPT) [
26].
This article uses lithium-ion battery packs as batteries for DG1 and DG2, and their open circuit voltage (OCV) is approximately 330 V. mH, F, and the ratio of the transformers is 160/400. The parameters of the improved VSG control are set as follow: 10,000, , (DG1), mH (DG1), , , , , (DG2), and mH (DG2). The parameters of the VSG control are set as follow: 10,000, , , and .
3.1. Stability Analysis
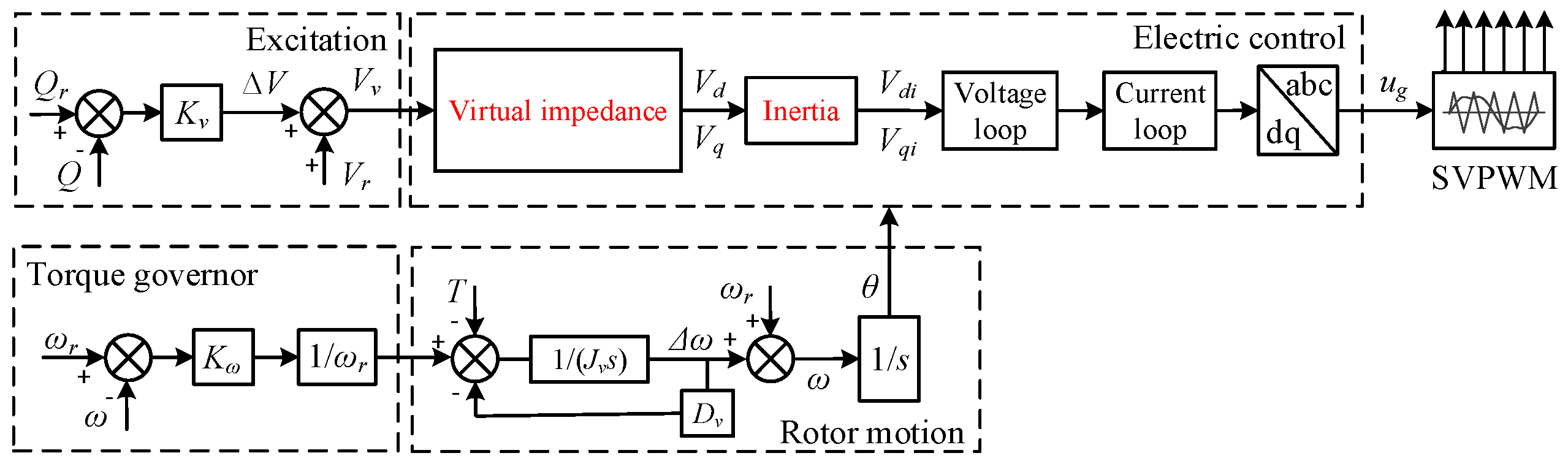
When the above parameters are selected, it is a good method to analyze the stability of the DG unit controlled by the improved VSG by establishing a corresponding small signal model. In order to simplify the model, this paper divides the small signal model of the improved VSG controlled DG unit into two parts. The one comprises the
P-
control block and
Q-
V control block (Torque governor block, rotor motion block, and excitation block), and the another is the electric control block (Voltage inertia, voltage loop, current loop, model of the inverter, and so on). Referring to [
27,
28,
29,
30], the small-signal model of the DG unit controlled by the improved VSG is described as follows.
(a) P- control block and Q-V control block
According to the
Figure 3, and only considering the DG1 (The analysis method of the DG2 is the same as that of the DG1), the linear relationship equation of the phase angle, power, and voltage is written as
Setting
and
, the coefficients
,
,
, and
are written as
where,
,
,
, and
represent the active power deviation, reactive power deviation, phase angle deviation, and voltage deviation, respectively, and there is
where
and
are the equivalent reactance and equivalent resistance of the transformer, respectively. Neglecting the subscript and differentiating the (
10), the equation is written as
As mentioned before, when choosing a suitable virtual reactance, the line resistance can be ignored. Let
, and substituting the (
10) and (
11) into (
13), the model can be obtained as
where
It is a good way to judge the stability of the model by using the Routh-Hurwitz stability criterion [
31,
32,
33], and the Routh array of the (
14) is shown in the
Table 1. In the
Table 1,
,
, and
in the first column are positive values, which demonstrates the stability of the corresponding small-signal model.
(b) Electric control block
Because the electric control block of the dq-axis is symmetrical. Therefore, only the electrical control block of the d-axis is needed to be considered, and its small-signal model is written as
where
In the (
17),
and
represent the proportional and integral control parameters in the voltage loop PID controller, respectively.
and
represent the proportional and integral control parameters in the current loop PID controller, respectively.
T is the sampling time and
Z is the resistance load. The Routh array of the characteristic equation of the (
16) is shown in the
Table 2. In the
Table 2,
,
,
,
,
, and
in the first column are the positive values, which demonstrates the stability of the corresponding small-signal model.
According to the Routh–Hurwitz stability criterion, these two small-signal models are stable. Therefore, the DG unit adopting the improved VSG control is also stable.
3.2. Performance Comparisons of Different VSG Control
In order to verify the feasibility of the improved VSG control, the corresponding experimental platform is established, which is shown in the
Figure 4. In the
Figure 4, the experimental platform comprises programmable DC power supplies, Scope Corder, three sets of DG units, an electronic load, and grid simulator, and the control strategies of the DG units are implemented by the TMS320F2812 controller. Meanwhile, the parameters of the experimental platform are the same as those of the connection model.
When DG3 is connected to DG1, the waveforms of the voltage (
and
), frequency (
), output active power (
), and output reactive power (
) of the DG1 are shown in the
Figure 5. As shown in the
Figure 5a, the voltage reference signal changes immediately when the VSG control is adopted, and the maximum overshoot of the voltage reference signal is over 2%. As shown in the
Figure 5b, when the improved VSG control is adopted, the overshoot of the voltage signal is less than the overshoot under VSG control, which is less than 0.8%, and the high frequency noises of the voltage reference signal can be filtered out. As shown in the
Figure 5c, there is a distortion of
when the VSG control is adopted, and the THD of
is approximately 2.98%. As shown in the
Figure 5d, when the improved VSG control is adopted, the
distortion of DG1 will be lower than the value of the VSG control, and the THD of
is approximately 2.18%, which is smaller than that under the VSG control.
When the transformer load is loaded, the voltage, frequency, and power waveforms of the DG1 are shown in the
Figure 6. As shown in the
Figure 6a, the voltage reference signal of the VSG control changes immediately when the transformer load is loaded, and its maximum overshoot is over 3%. As shown in the
Figure 6b, when the transformer load is loaded, the overshoot of the voltage signal is less than the overshoot under VSG control, which is less than 1.1%, and the high frequency noises of the voltage reference signal can be filtered out. As shown in the
Figure 6c, there is a large distortion of
when the transformer load is loaded. The THD of
is approximately 3.43%. As shown in the
Figure 6d, when the transformer load is loaded, the value of the
distortion of DG1 under the control of the improved VSG is smaller than the value under the control of the VSG. And the THD of
is approximately 2.62%, which is smaller than that under the VSG control.
When the DG unit has a load and is in parallel operation, the waveforms of active power (
and
) and reactive power (
and
) are shown in the
Figure 7. The circulating current of active power when adopting VSG control and adopting modified VSG control, the values are 55 and 47 W, respectively. The reactive power of the microgrid is 30 Var and 26 Var, respectively, when using VSG control and when using improved VSG control. When the resistive load increases suddenly, the power overshoot of DG2 controlled by VSG is greater than 9%, which is greater than the maximum power overshoot of DG2 when the recommended control is adopted.
3.3. Performance Tests of Improved VSG Control Under Different Frequencies of Grid
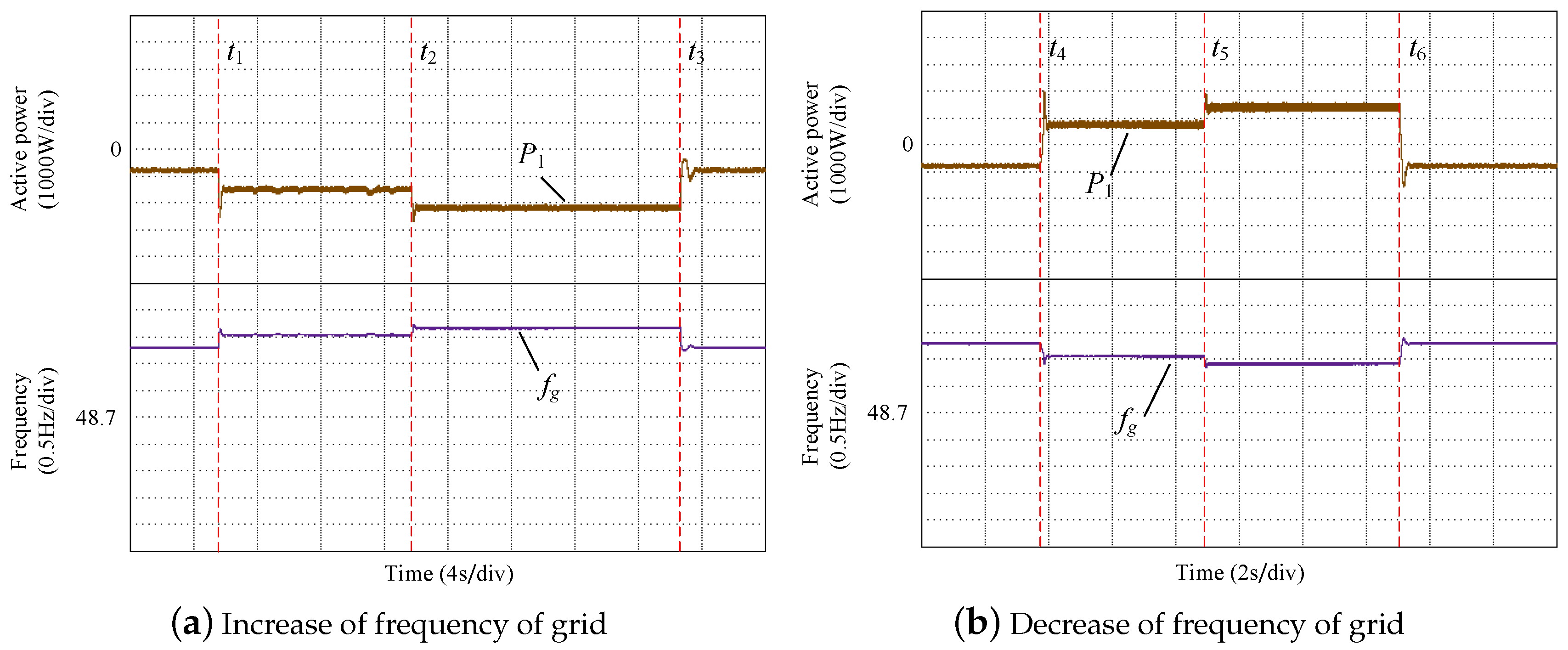
This article tests the various performances of the grid-connected DG1 when the frequency is lower than 50.5 Hz and higher than 49.5 Hz. When the frequency increases or decreases, the injected or absorbed active power of DG1 is limited within the range of [−2500 W, 2500 W]. This article discusses the working status of DG1 under different frequencies of the proposed control strategy.
Figure 8 in this article shows the active power and frequency waveform of the proposed control DG1 when the frequency increases or decreases.It can be seen from
Figure 8a that when the frequency of the grid increases from 50 to 50.2 Hz, the absorbed active power of DG1 first decreases to over −2500 W, but immediately returns to −1560 W. Then when the frequency of the grid increases from 50.2 to 50.3 Hz, the active power of DG1 can be quickly adjusted to about −2160 W. Finally, when the frequency is reduced from 50.3 to 50 Hz, the active power of DG1 can be immediately increased to −900 W. When the frequency is basically unchanged, the fluctuation of the active power is small. It can be seen from
Figure 8b that when the frequency is reduced from 50 to 49.7 Hz, the injected active power of DG1 will first increase to 3000 W, but immediately return to 1910 W. Then when the frequency is reduced from 49.7 to 46.65 Hz, the active power speed of DG1 increases to 2430 W. Finally, when the frequency increases from 49.65 to 50 Hz, the active power of DG1 is reduced to −900 W. It can be obtained that when the frequency is basically unchanged, the fluctuation of the active power is small.
3.4. Active Power Regulation of Islanded Microgrid
In this article, the active power of the island microgrid can be adjusted by DG1 and DG2. However, lithium-ion battery packs are easily affected by unlimited charging/discharging, resulting in overcharging or over-discharging. The phenomenon of rapid open circuit voltage (OCV) change will occur when the state of charge (SOC) is too large or too small. In this regard, SOC greater than 90% or less than 20% is prohibited. At the same time, it is necessary to set an interval between different operating states to prevent frequent charging and discharging when the DG unit of the lithium-ion battery pack operates on the microgrid. In order to keep the lithium-ion battery pack in a stable operating state, and considering the capacity of the lithium-ion battery pack, setting the interval to [30%, 40%] is an appropriate value.
When the resistive load remains unchanged and DG3 is always in the MPPT state. The operating state of the island microgrid in the proposed control is shown below.
(1) Case 1
Make the SOC of DG1 and DG2 greater than 40%. At this time DG3 runs in MPPT mode, and the active power injected by DG1 and DG2 into the microgrid is equal. There is
where
is the active power of the load,
and
are the active power of DG1 and DG2 respectively,
is the power loss, and
is the output active power of the MPPT mode.
The waveform of the output active power of Case 1 is shown in the
Figure 9. Among them is the output active power of DG units (
,
, and
). It can be seen from the
Figure 9 that when t
, the active power of DG1, DG2 and DG3 drop from about 1580 to 551 W, from about 1615 to 606 W, and from 0 W to about 2100 W. When DG3 is connected to the microgrid, the maximum overshoot of the active power of all DG units is less than 0.9%.
(2) Case 2
Make the SOC of DG1 and DG2 less than 30%. At this time, DG3 runs in MPPT state, and the active power absorbed by DG1 and DG2 from DG3 is the same. There is
The waveforms of the output active power at Case 2 are shown in the
Figure 10. When load shedding occurs at t
, the active power of DG1 is reduced from approximately 551 W to −884 W, the active power of DG2 is reduced from approximately 606 W to −856 W, and the active power of DG3 is unchanged. When load shedding occurs, the overshoot of active power of DG1 and DG2 is smaller than 0.9%, and the operation state of DG3 is almost unchanged in this condition. Meanwhile, the active power fluctuations of all DG units are very small when the microgrid operates in steady state.
(3) Case 3
Let the SOC of DG1 less than 30%, and the SOC of DG2 should be greater than 40%, DG3 runs in MPPT mode. At this time, DG1 absorbs active power from the microgrid, and DG2 injects active power into the microgrid. There is
The waveforms of the output active power at Case 3 are shown in the
Figure 11. When t =
, DG1 changes its working state. At this time, the active power of DG1 and DG2 is reduced from 551 to −420 W, and 606 W is increased to 1615 W, and the active power of DG3 remains unchanged. When DG1 changes working status, the overshoot of active power in DG1 and DG2 is less than 1%. In this case, the working status of DG3 remains unchanged. At the same time, when the microgrid remains unchanged, the active power fluctuations of all DG units are very small.
(4) Case 4
Assuming that the initial SOC of DG1 and DG2 is less than 40% and greater than 30%, the working status of DG1 and DG2 will be the same as in case 2, and if the SOC of DG1 and DG2 is less than 40% and greater than 30%, the operating state of DG1 and DG2 will be the same as the previous operating state.
4. Conclusions
An improved VSG control is proposed in this paper to solve the drawbacks of the VSG control. It incorporates second-order voltage inertia and virtual impedance into the VSG control. The second-order voltage inertia can effectively decrease the influence caused by the power fluctuations. It can also effectively reduce the influence of high frequency noises on the voltage. The virtual impedance has the characteristic of reducing coupling in the DG unit. Therefore, their combination can not only improve the performance of the microgrid, but also make the power distribution of the microgrid more accurate.
According to the experiments, when the improved VSG control is adopted, the accuracy and characteristics of the power sharing of the microgrid is optimized compared with the VSG control. Therefore, improved VSG control can have better performance than VSG control. When the improved VSG control is adopted, not only the DG unit can operate stably under the state of changing frequency, but also the island microgrid can operate stably under different changing states. Meanwhile, it can also be used in more complex systems.

 ,
, 











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}