Predictive Adaptive Filter for Reducing Total Harmonics Distortion in PV Systems



Abstract
:
1. Background
2. Literature Review
3. Methodology
3.1. LMS Algorithm
3.2. NLMS Algorithm
3.3. LLMS Algorithm
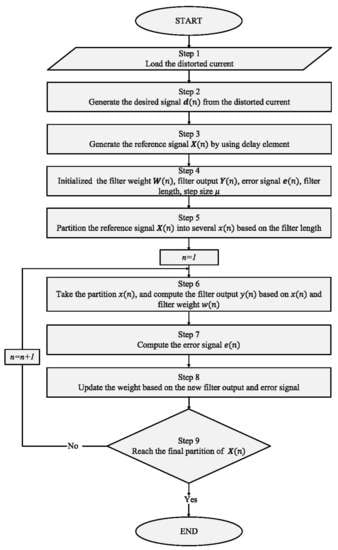
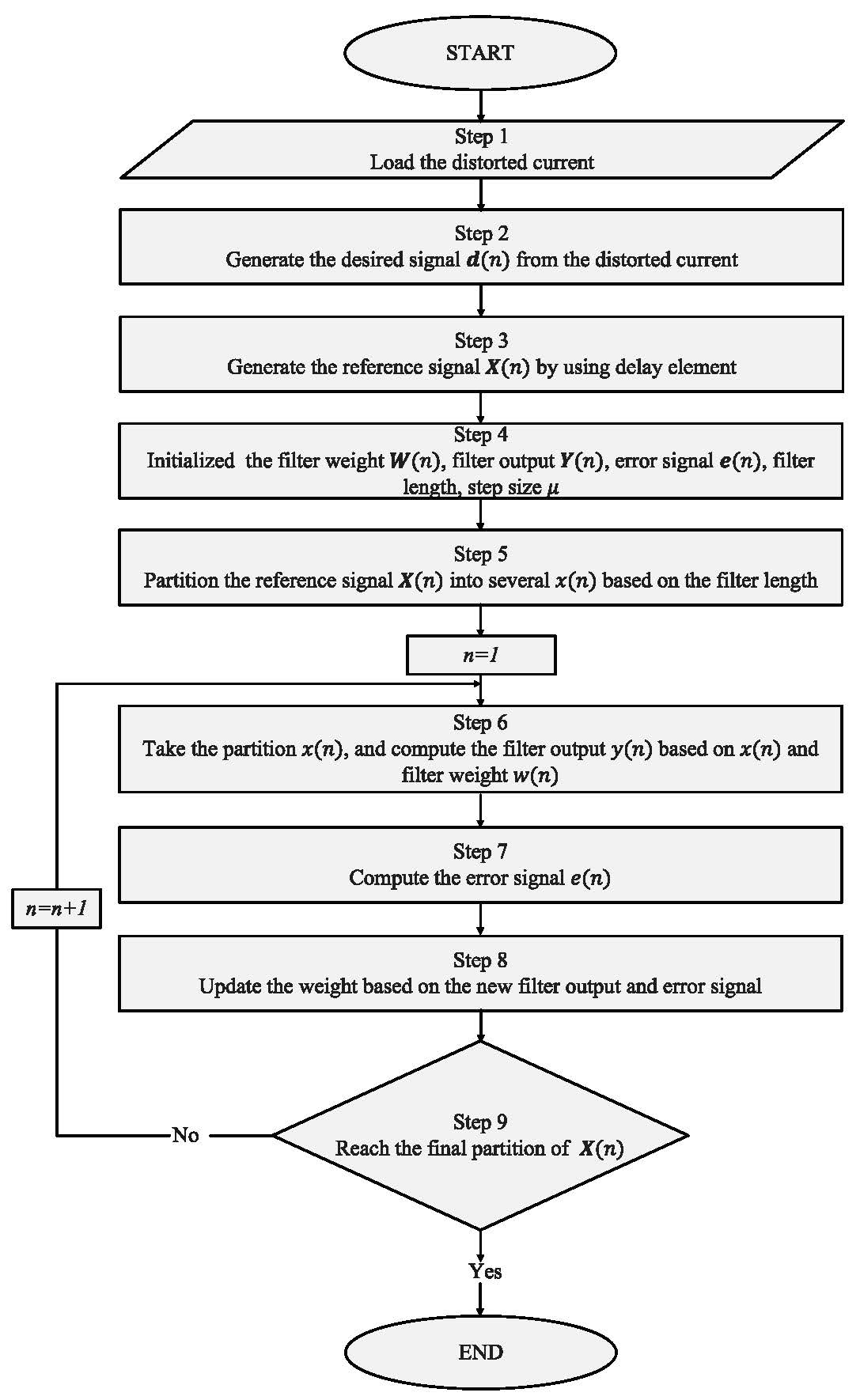
3.4. THD Filtering Process
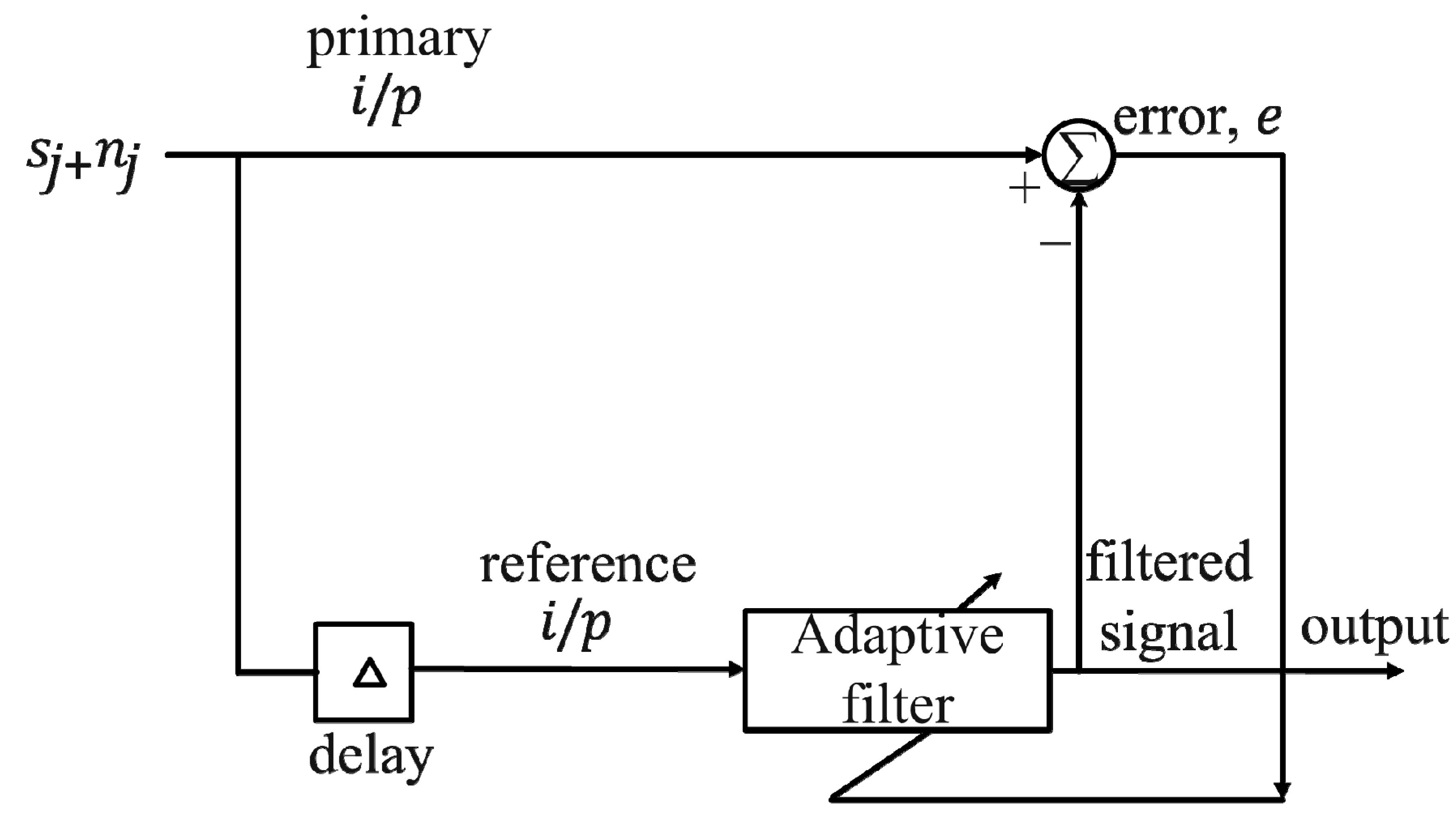
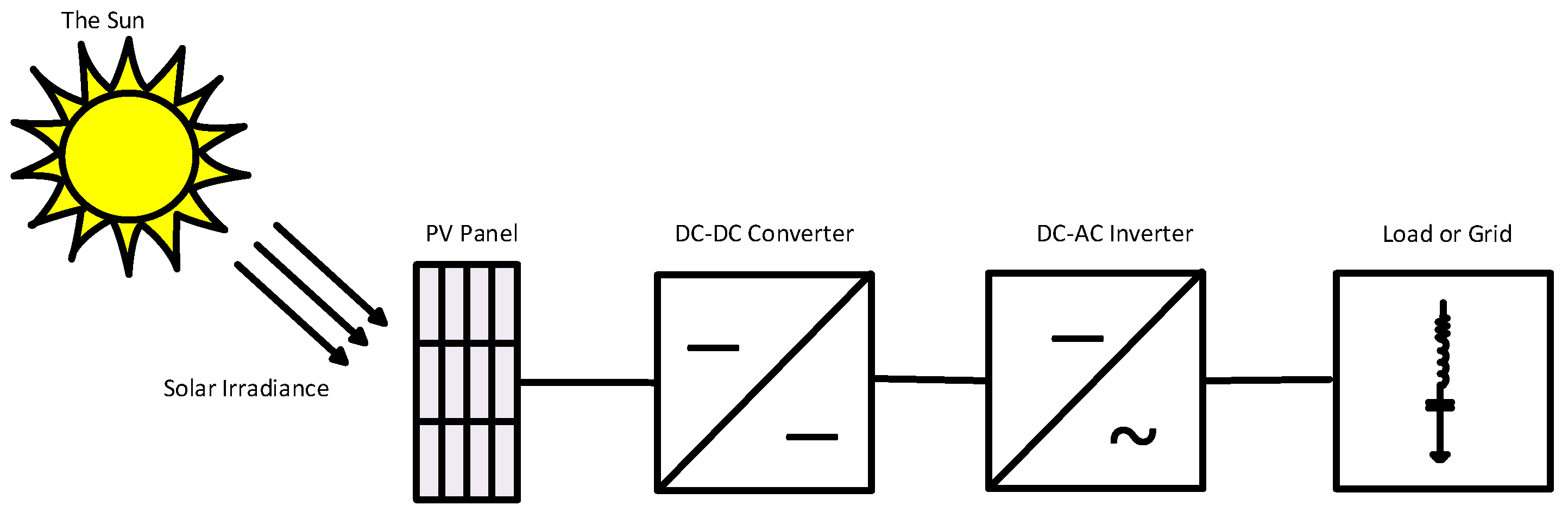
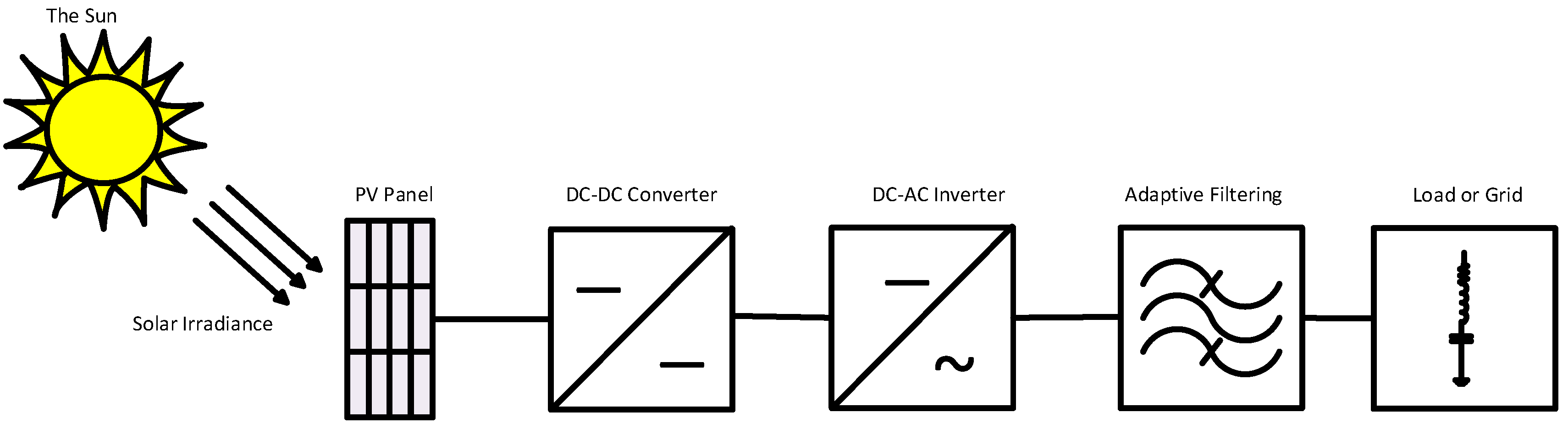
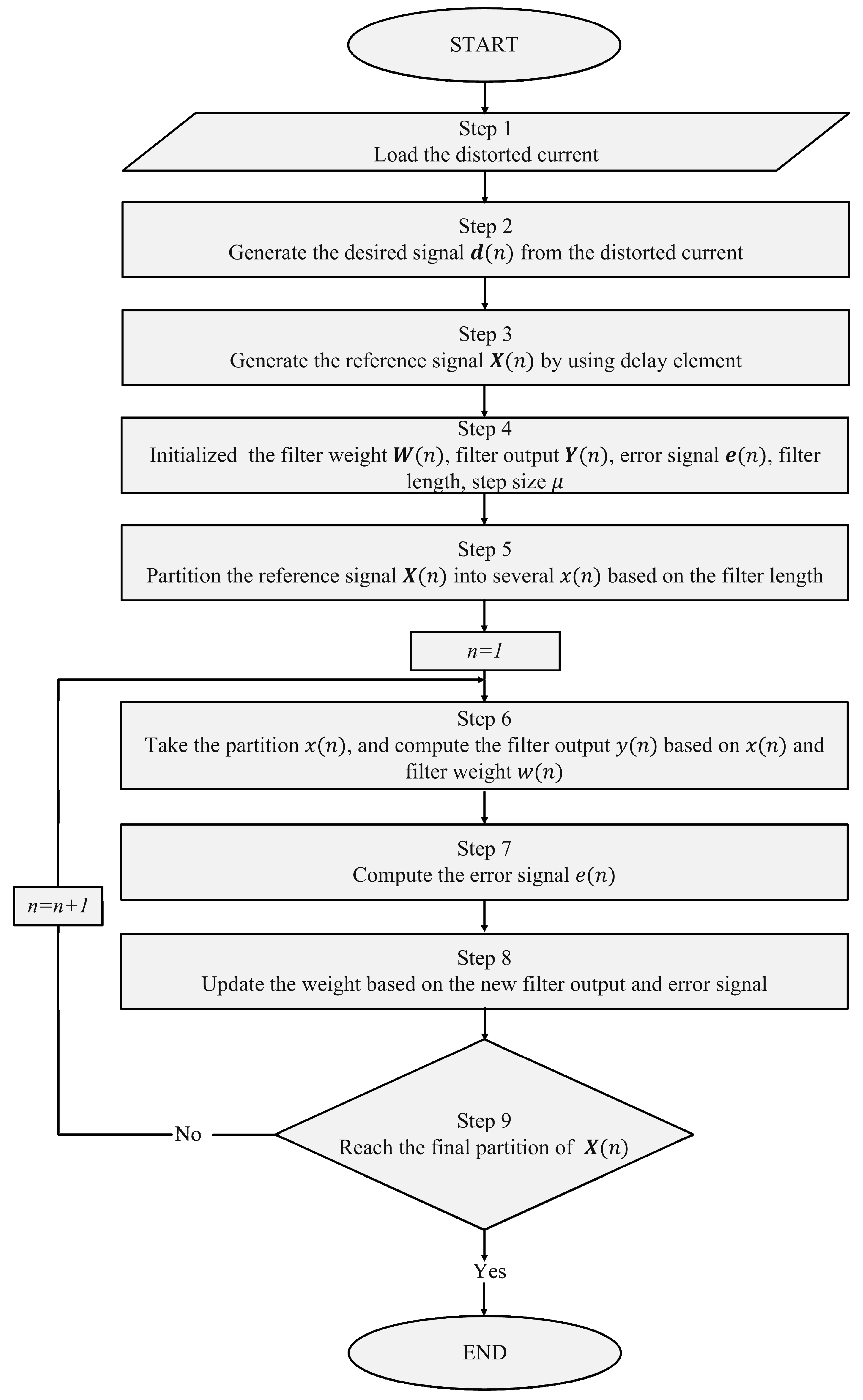
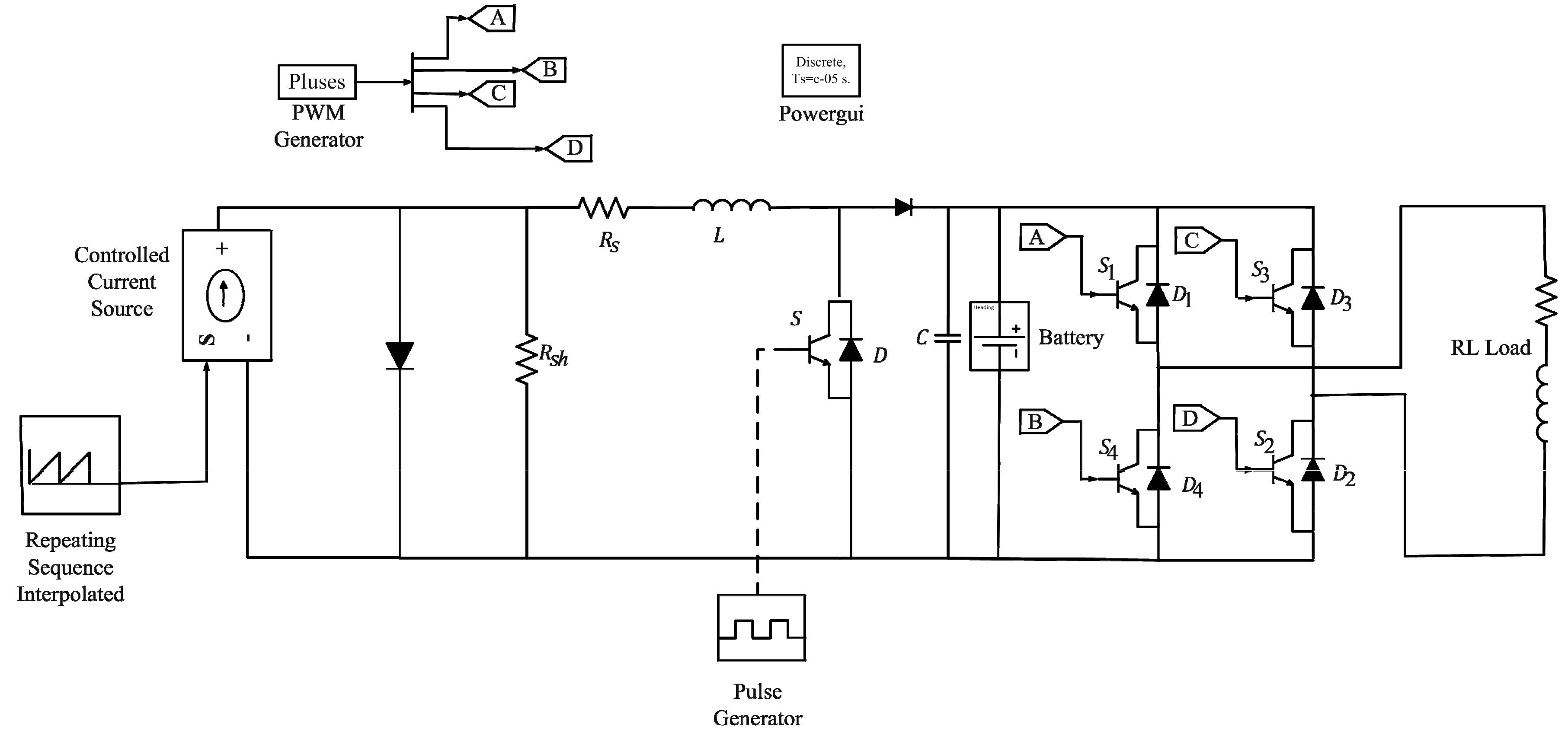
- Step 1: The distorted current signal from the output of the PV system shown in Figure 6 is loaded. The distorted current serves as the primary signal of the adaptive filter.
- Step 2: The desired signal is generated from the primary signal by initialising as the primary signal.
- Step 3: The reference signal is generated from the desired signal by using a unit time delay, i.e., .
- Step 4: The initial values of filter length , filter weight , filter output , error signal and step size are set up.
- Step 5: The reference signal is divided into several partitions based on the size of the signal and adaptive filter. For example, if the reference signal has 1000 elements and the filter length is , then the number of the partitions will be 50 ().
- Step 6: The filter output is computed by multiplying with the filter weight, where is the range of all partitions.
- Step 7: The error signal is computed.
- Step 8: The filter weight is updated with the new values of and based on Equation (11), (12) or (13), depending on whether the LMS, NLMS or LLMS is used, respectively.
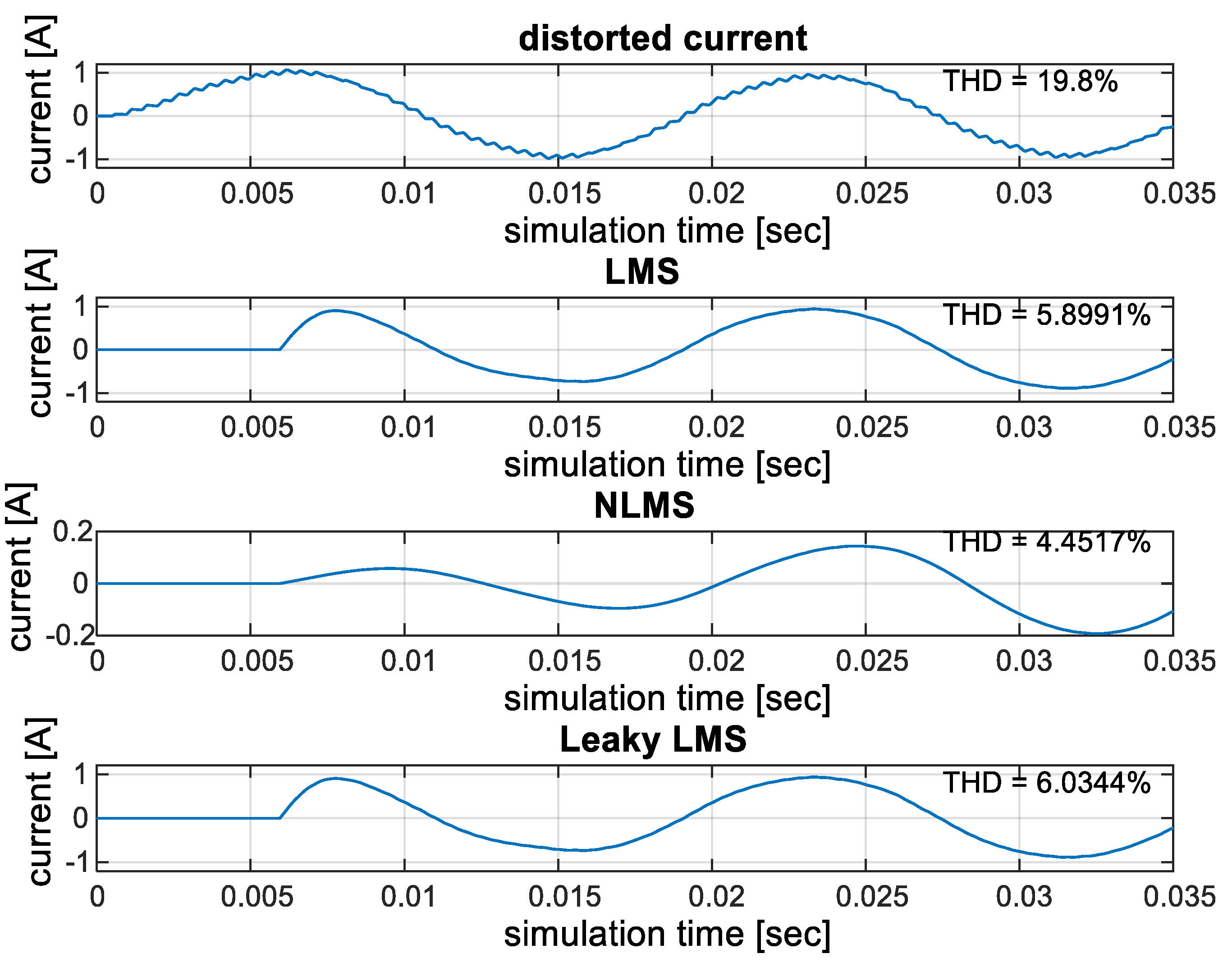
- Step 9: Steps 6–8 are repeated until the entire reference signal is covered. The level of THD before and after applying the adaptive filter is determined as follows:where is the current root mean square and n is the harmonic order.
4. Results and Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Ashok Kumar, L.; Sumathi, S.; Surekha, P. Solar PV and Wind Energ Conversion Systems: An Introduction to Theory, Modeling with MATLAB/SIMULINK, and the Role of Soft Computing Techniques; Springer: Berlin/Heidelberg, Germany, 2015. [Google Scholar]
- Alhafadhi, L. Total Harmonics Distortion Reduction Using Adaptive, Weiner, and Kalman Filters. Master’s Thesis, Westren Michigan University, Kalamazoo, MI, USA, 2016. [Google Scholar]
- Alhafadhi, L.; Asumadu, J.; Alsafi, A. Total Harmonics Distortion reduction using a new method of adaptive filtering. In Proceeding of the 2016 IEEE Western New York Image and Signal Processing Workshop (WNYISPW), Rochester, NY, USA, 18 November 2016; pp. 1–5. [Google Scholar]
- Alhafadhi, L.; Asumadu, J.; Alsafi, A. Total harmonics distortion reduction using adaptive, Weiner, and Kalman filters. In Proceeding of the 2017 IEEE 7th Annual Computing and Communication Workshop and Conference (CCWC), Las Vegas, NV, USA, 9–11 January 2017; pp. 1–8. [Google Scholar]
- Du, Y.; Lu, D.D.-C. Harmonic Distortion Caused by Single-Phase Grid-Connected PV Inverter. In Power System Harmonics: Analysis, Effects and Mitigation Solutions for Power Quality Improvement; IntechOpen: London, UK, 2018; p. 51. [Google Scholar]
- Sunny, R.; Anto, R. Control of harmonics and performance analysis of a grid connected photovoltaic system. Int. J. Adv. Res. Electr. Electron. Instrum. Eng. 2013, 2, 37–45. [Google Scholar]
- Kontogiannis, K.; Vokas, G.; Nanou, S.; Papathanassiou, S. Power quality field measurements on PV inverters. Int. J. Adv. Res. Electr. Electron. Instrum. Eng. 2013, 2, 5301–5314. [Google Scholar]
- Bizon, N. Global Maximum Power Point Tracking (GMPPT) of Photovoltaic array using the Extremum Seeking Control (ESC): A review and a new GMPPT ESC scheme. Renew. Sustain. Energy Rev. 2016, 57, 524–539. [Google Scholar] [CrossRef]
- Papaioannou, I.T.; Bouhouras, A.S.; Marinopoulos, A.G.; Alexiadis, M.C.; Demoulias, C.S.; Labridis, D.P. Harmonic impact of small photovoltaic systems connected to the LV distribution network. In Proceeding of the 2008 5th International Conference on the European Electricity Market, Lisboa, Portugal, 28–30 May 2008; pp. 1–6. [Google Scholar]
- Rahimi, K.; Mohajeryami, S.; Majzoobi, A. Effects of photovoltaic systems on power quality. In Proceeding of the 2016 North American Power Symposium (NAPS), IEEE, Denver, CO, USA, 18–20 September 2016; pp. 1–6. [Google Scholar]
- Sundareswaran, K.; Peddapati, S.; Palani, S. Application of random search method for maximum power point tracking in partially shaded photovoltaic systems. IET Renew. Power Gener. 2014, 8, 670–678. [Google Scholar] [CrossRef]
- Martinek, R.; Bilik, P.; Baros, J.; Brablik, J.; Kahankova, R.; Jaros, R.; Danys, L.; Rzidky, J.; Wen, H. Design of a Measuring System for Electricity Quality Monitoring within the SMART Street Lighting Test Polygon: Pilot Study on Adaptive Current Control Strategy for Three-Phase Shunt Active Power Filters. Sensors 2020, 20, 1718. [Google Scholar] [CrossRef] [Green Version]
- Martinek, R.; Rzidky, J.; Jaros, R.; Bilik, P.; Ladrova, M. Least mean squares and recursive least squares algorithms for total harmonic distortion reduction using shunt active power filter control. Energies 2019, 12, 1545. [Google Scholar] [CrossRef] [Green Version]
- Kjaer, S.B.; Pedersen, J.K.; Blaabjerg, F. A review of single-phase grid-connected inverters for photovoltaic modules. IEEE Trans. Ind. Appl. 2005, 41, 1292–1306. [Google Scholar] [CrossRef]
- Omran, W. Performance Analysis of Grid-Connected Photovoltaic Systems. Ph.D. Thesis, University of Waterloo, Waterloo, ON, Canda, 2010. [Google Scholar]
- Rahmani, S.; Hamadi, A.; Al-Haddad, K. A new combination of shunt hybrid power filter and thyristor controlled reactor for harmonics and reactive power compensation. In Proceeding of the 2009 IEEE Electrical Power & Energy Conference (EPEC), Montreal, QC, Canada, 22–23 October 2009; pp. 1–6. [Google Scholar]
- Rivas, D.; Morán, L.; Dixon, J.W.; Espinoza, J.R. Improving passive filter compensation performance with active techniques. IEEE Trans. Ind. Electron. 2003, 50, 161–170. [Google Scholar] [CrossRef] [Green Version]
- Alhafadhi, L.; Teh, J. Advances in reduction of total harmonic distortion in solar photovoltaic systems: A literature review. Int. J. Energy Res. 2020, 44, 2455–2470. [Google Scholar] [CrossRef]
- Jordehi, A.R. Maximum power point tracking in photovoltaic (PV) systems: A review of different approaches. Renew. Sustain. Energy Rev. 2016, 65, 1127–1138. [Google Scholar] [CrossRef]
- Fu, Q.; Cheng, G.L.; Liu, F.J.; Ma, G.L. Improvement of P&O MPPT Method for Photovoltaic System Based on Adaptive Prediction Algorithm. In Applied Mechanics and Materials; Trans Tech Publications: Baech, Switzerland, 2013; pp. 2131–2137. [Google Scholar]
- Liu, F.; Kang, Y.; Zhang, Y.; Duan, S. Comparison of P&O and hill climbing MPPT methods for grid-connected PV converter. In Proceeding of the 2008 3rd IEEE Conference on Industrial Electronics and Applications, Singapore, 3–5 June 2008; pp. 804–807. [Google Scholar]
- Chiang, M.-L.; Hua, C.-C.; Lin, J.-R. Direct power control for distributed PV power system. In Proceedings of the Power Conversion Conference-Osaka 2002 (Cat. No. 02TH8579), IEEE, Osaka, Japan, 2–5 April 2002; pp. 311–315. [Google Scholar]
- Xiao, W. A Modified Adaptive Hill Climbing Maximum Power Point Tracking (MPPT) Control Method For Photovoltaic Power Systems. Ph.D. Dissertation, University of Britch Columbia, Vancouver, Canada, 2003. [Google Scholar]
- Xiao, W.; Dunford, W.G. A modified adaptive hill climbing MPPT method for photovoltaic power systems. In Proceeding of the 2004 IEEE 35th Annual Power Electronics Specialists Conference (IEEE Cat. No. 04CH37551), Aachen, Germany, 20–25 June 2004; pp. 1957–1963. [Google Scholar]
- Kobayashi, K.; Matsuo, H.; Sekine, Y. A novel optimum operating point tracker of the solar cell power supply system. In Proceeding of the 2004 IEEE 35th Annual Power Electronics Specialists Conference (IEEE Cat. No. 04CH37551), Aachen, Germany, 20–25 June 2004; pp. 2147–2151. [Google Scholar]
- Noguchi, T.; Togashi, S.; Nakamoto, R. Short-Current-Pulse Based Adaptive Maximum-Power-Point Tracking for Photovoltaic Power Generation System. Procceeding of the IEEE Internation Symposium On Industrial Electronics (ISIE2000), Cholula, Puebla, Mexico, 4–8 December 2000; Volume 139, pp. 157–162. [Google Scholar]
- Patterson, D.J. Electrical system design for a solar powered vehicle. In Proceeding of the 21st Annual IEEE Conference on Power Electronics Specialists, San Antonio, TX, USA; 1990; pp. 618–622. [Google Scholar]
- Lim, Y.H.; Hamill, D. Simple maximum power point tracker for photovoltaic arrays. Electron. Lett. 2000, 36, 997–999. [Google Scholar] [CrossRef] [Green Version]
- Lim, Y.H.; Hamill, D.C. Synthesis, simulation and experimental verification of a maximum power point tracker from nonlinear dynamics. In Proceeding of the 2001 IEEE 32nd Annual Power Electronics Specialists Conference (IEEE Cat. No. 01CH37230), Vancouver, BC, Canada, 17–21 June 2001; pp. 199–204. [Google Scholar]
- Bodur, M.; Ermis, M. Maximum power point tracking for low power photovoltaic solar panels. In Proceedings of the MELECON’94. Mediterranean Electrotechnical Conference, IEEE, Antalya, Turkey, 12–14 April 1994; pp. 758–761. [Google Scholar]
- Pan, C.-T.; Chen, J.-Y.; Chu, C.-P.; Huang, Y.-S. A fast maximum power point tracker for photovoltaic power systems, IECON’99. In Proceedings of the 25th Annual Conference of the IEEE Industrial Electronics Society (Cat. No. 99CH37029), San Jose, CA, USA, 29 November–3 December 1999; Volume 7, pp. 390–393. [Google Scholar]
- Amrouche, B.; Belhamel, M.; Guessoum, A. Artificial intelligence based P&O MPPT method for photovoltaic systems. In Proceedings of the Revue des Energies Renouvelables ICRESD-07, Tlemcen, Algeria, 21–24 May 2007; pp. 11–16. [Google Scholar]
- Islam, M.A.; Kabir, M.A. Neural network based maximum power point tracking of photovoltaic arrays. In Proceeding of the TENCON 2011-2011 IEEE Region 10 Conference, IEEE, Bali, Indonesia, 21–24 November 2011; pp. 79–82. [Google Scholar]
- Rizzo, S.A.; Scelba, G. ANN based MPPT method for rapidly variable shading conditions. Appl. Energy 2015, 145, 124–132. [Google Scholar] [CrossRef]
- Alajmi, B.N.; Ahmed, K.H.; Finney, S.J.; Williams, B.W. A maximum power point tracking technique for partially shaded photovoltaic systems in microgrids. IEEE Trans. Ind. Electron. 2013, 60, 1596–1606. [Google Scholar] [CrossRef]
- Chen, Y.-T.; Jhang, Y.-C.; Liang, R.-H. A fuzzy-logic based auto-scaling variable step-size MPPT method for PV systems. Solar Energy 2016, 126, 53–63. [Google Scholar] [CrossRef]
- Mahmoud, A.; Mashaly, H.; Kandil, S.; El Khashab, H.; Nashed, M. Fuzzy logic implementation for photovoltaic maximum power tracking. In Proceeding of the 2000 26th Annual Conference of the IEEE Industrial Electronics Society. IECON 2000. 2000 IEEE International Conference on Industrial Electronics, Control and Instrumentation. 21st Century Technologies, Nagoya, Japan, 22–28 October 2000; pp. 735–740. [Google Scholar]
- Alajmi, B.N.; Ahmed, K.H.; Finney, S.J.; Williams, B.W. Fuzzy-logic-control approach of a modified hill-climbing method for maximum power point in microgrid standalone photovoltaic system. IEEE Trans. power Electron. 2011, 26, 1022–1030. [Google Scholar] [CrossRef]
- Eberhart, R.C.; Shi, Y.; Kennedy, J. Swarm Intelligence; Elsevier: Amsterdam, The Netherlands, 2001. [Google Scholar]
- Jordehi, A.R. Particle swarm optimisation (PSO) for allocation of FACTS devices in electric transmission systems: A review. Renew. Sustain. Energy Rev. 2015, 52, 1260–1267. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceeding International Conference on Neural Networks, Perth, Australia, 27 November–1 December 1995; pp. 1942–1948. [Google Scholar]
- Sundareswaran, K.; Sankar, P.; Nayak, P.; Simon, S.P.; Palani, S. Enhanced energy output from a PV system under partial shaded conditions through artificial bee colony. IEEE Trans. Sustain. Energy 2015, 6, 198–209. [Google Scholar] [CrossRef]
- Goldberg, D.E.; Holland, J.H. Genetic algorithms and machine learning. Mach. Learn. 1988, 3, 95–99. [Google Scholar] [CrossRef]
- Zambri, M.K.M.; Aras, M.S.M.; Khamis, A. Investigating the impact of photovoltaic connection to the malaysian distribution system. J. Telecommun. Electron. Comput. Eng. (JTEC) 2016, 8, 23–28. [Google Scholar]
- Ali, M.; Kamarudin, S.K.; Masdar, M.; Mohamed, A. An overview of power electronics applications in fuel cell systems: DC and AC converters. Sci. World J. 2014, 2014, 103709. [Google Scholar] [CrossRef] [PubMed]
- Baharudin, N.H.; Mansur, T.M.N.T.; Hamid, F.A.; Ali, R.; Misrun, M.I. Topologies of DC-DC converter in solar PV applications. Indones J. Electr. Eng. Comput. Sci. 2017, 8, 368–374. [Google Scholar] [CrossRef]
- Li, W.; He, X. Review of nonisolated high-step-up DC/DC converters in photovoltaic grid-connected applications. IEEE Trans. Ind. Electron. 2011, 58, 1239–1250. [Google Scholar] [CrossRef]
- Pinto, S.J.; Panda, G. Wavelet technique based islanding detection and improved repetitive current control for reliable operation of grid-connected PV systems. Int. J. Electr. Power Energy Syst. 2015, 67, 39–51. [Google Scholar] [CrossRef]
- Deveci, O.; Kasnakoğlu, C. Performance improvement of a photovoltaic system using a controller redesign based on numerical modeling. Int. J. Hydrog. Energy 2016, 41, 12634–12649. [Google Scholar] [CrossRef]
- Marrekchi, A.; Kammoun, S.; Sallem, S.; Kammoun, M.B.A. A practical technique for connecting PV generator to single-phase grid. Solar Energy 2015, 118, 145–154. [Google Scholar] [CrossRef]
- Gupta, A.; Garg, P. Grid integrated solar photovoltaic system using multilevel inverter. Int. J. Adv. Res. Electr. Electron. Instrum. Eng. 2013, 2, 3952–3960. [Google Scholar]
- Yusof, N.A.; Sapari, N.M.; Mokhlis, H.; Selvaraj, J. A Comparative Study of 5-level and 7-level Multilevel Inverter Connected to the Grid. In Proceeding of the 2012 IEEE International Conference on Power and Energy (PECon), Kota Kinabalu, Malaysia, 2–5 December 2012; pp. 542–547. [Google Scholar]
- Muhammad, R. Power Electronics Devices, Circuits and Applications; Pearson: Nobel Yayınevi, Turkey, 2014. [Google Scholar]
- Rode, S.V.; Ladhake, S.A. An alternative filter for harmonic elimintation. Int. J. Comput. Sic. Netw. Secur. 2010, 10, 154–157. [Google Scholar]
- Grigsby, L.L. Power Systems, 3rd ed.; CRC Press: Boca Raton, FL, USA; Taylor & Francis Group, LLC: Abingdon, UK, 2016. [Google Scholar]
- Blaabjerg, F.; Chen, Z.; Kjaer, S.B. Power electronics as efficient interface in dispersed power generation systems. IEEE Trans. Power Electron. 2004, 19, 1184–1194. [Google Scholar] [CrossRef]
- Vashi, A. Harmonic Reduction in Power System. Master’s Thesis, California State University at Sacramento, Sacramento, CA, USA, 2009. [Google Scholar]
- Blasko, V. A novel method for selective harmonic elimination in power electronic equipment. IEEE Trans. Power Electron. 2007, 22, 223–228. [Google Scholar] [CrossRef]
- Blasko, V.; Arnedo, L.; Kshirsagar, P.; Dwari, S. Control and elimination of sinusoidal harmonics in power electronics equipment: A system approach. In Proceedings of the IEEE Energy Conversion Congress and Exposition, IEEE, Phoenix, AZ, USA, 17–22 September 2011; pp. 2827–2837. [Google Scholar]
- Haykin, S.S. Adaptive Filter Theory; Pearson Education India: Bengaluru, India, 2005. [Google Scholar]
- Sayed, A.H. Fundamentals of Adaptive Filtering; John Wiley & Sons: Hoboken, NJ, USA, 2003. [Google Scholar]
- Avalos, J.G.; Sanchez, J.C.; Velazquez, J. Applications of adaptive filtering. Adapt. Filter. Appl. 2011, 1, 3–20. [Google Scholar]
- Hughes, J.B. Signal Enhancement Using Time-Frequency Based Denoising. Master’s Thesis, Naval Postgrduate School, Monterey, CA, USA, 2003. [Google Scholar]
- Mayyas, K.; Aboulnasr, T. Leaky LMS algorithm: MSE analysis for Gaussian data. IEEE Trans. Signal Process. 1997, 45, 927–934. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Step Size | LMS | NLMS | LLMS |
|---|---|---|---|
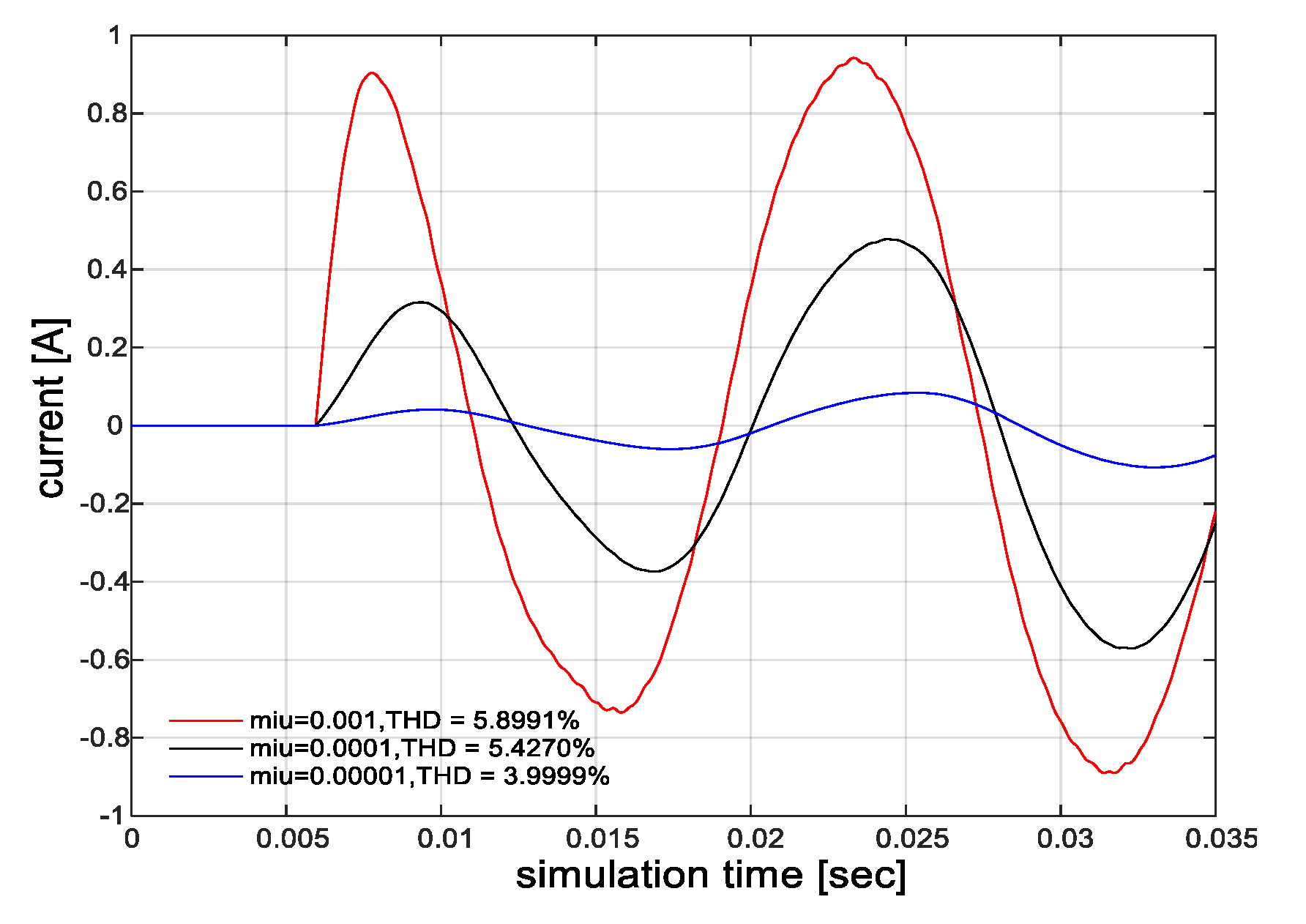
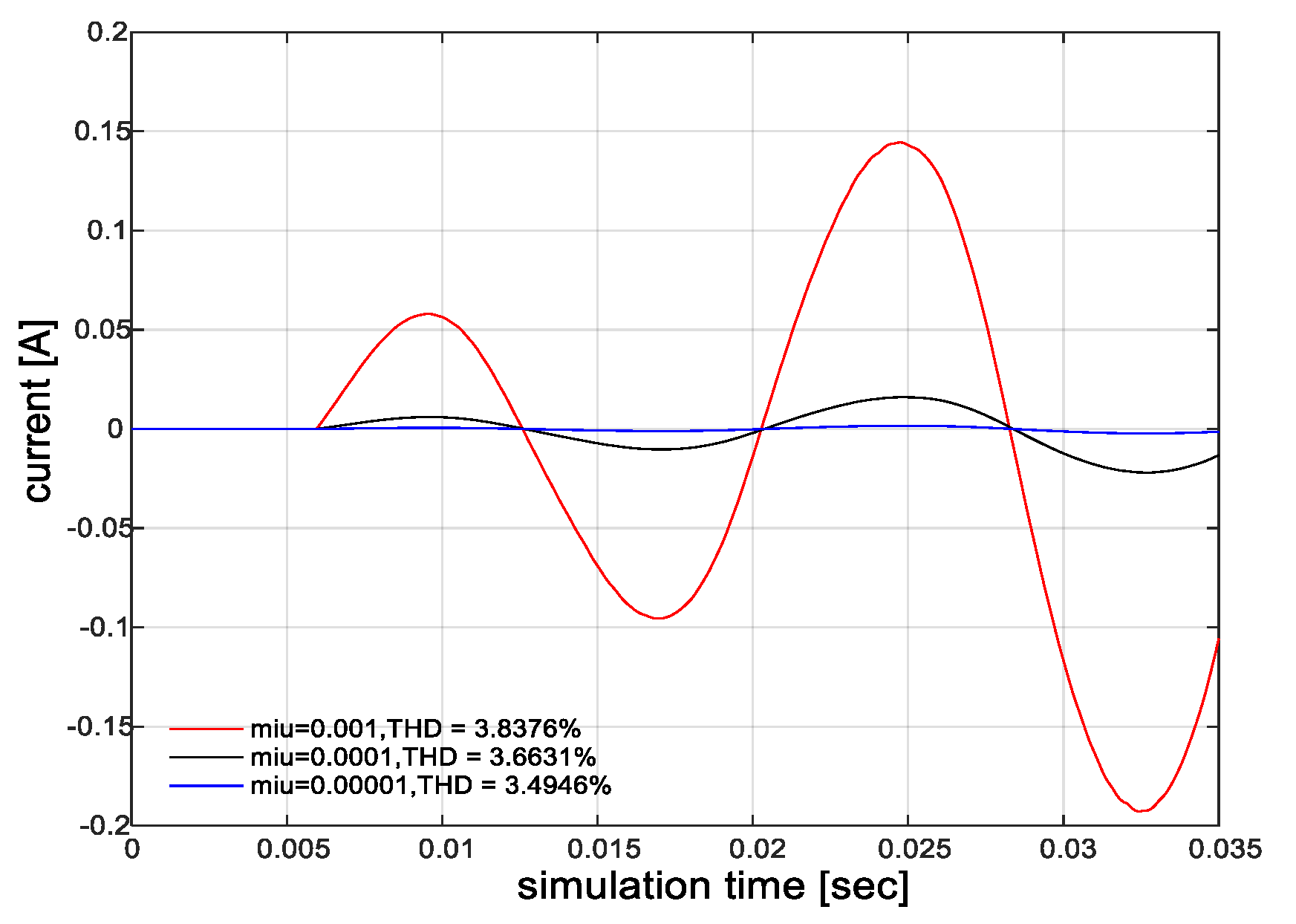
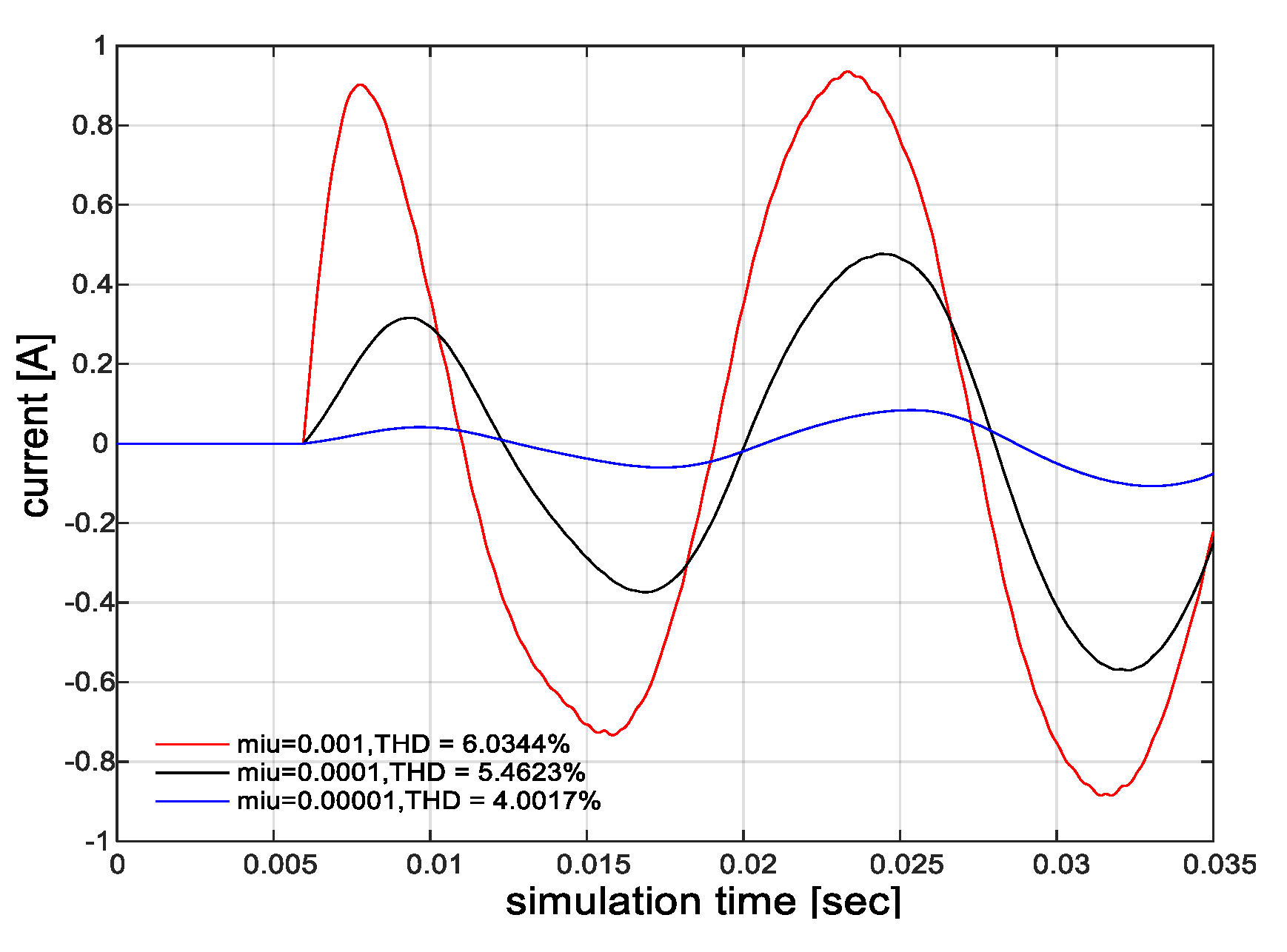
| μ = 0.001 | 5.8991% | 3.8376% | 6.0344% |
| μ = 0.0001 | 5.4270% | 3.6631% | 5.4623% |
| μ = 0.00001 | 3.9999% | 3.4946% | 4.0017% |
| Filter Length | LMS | NLMS | LLMS |
|---|---|---|---|
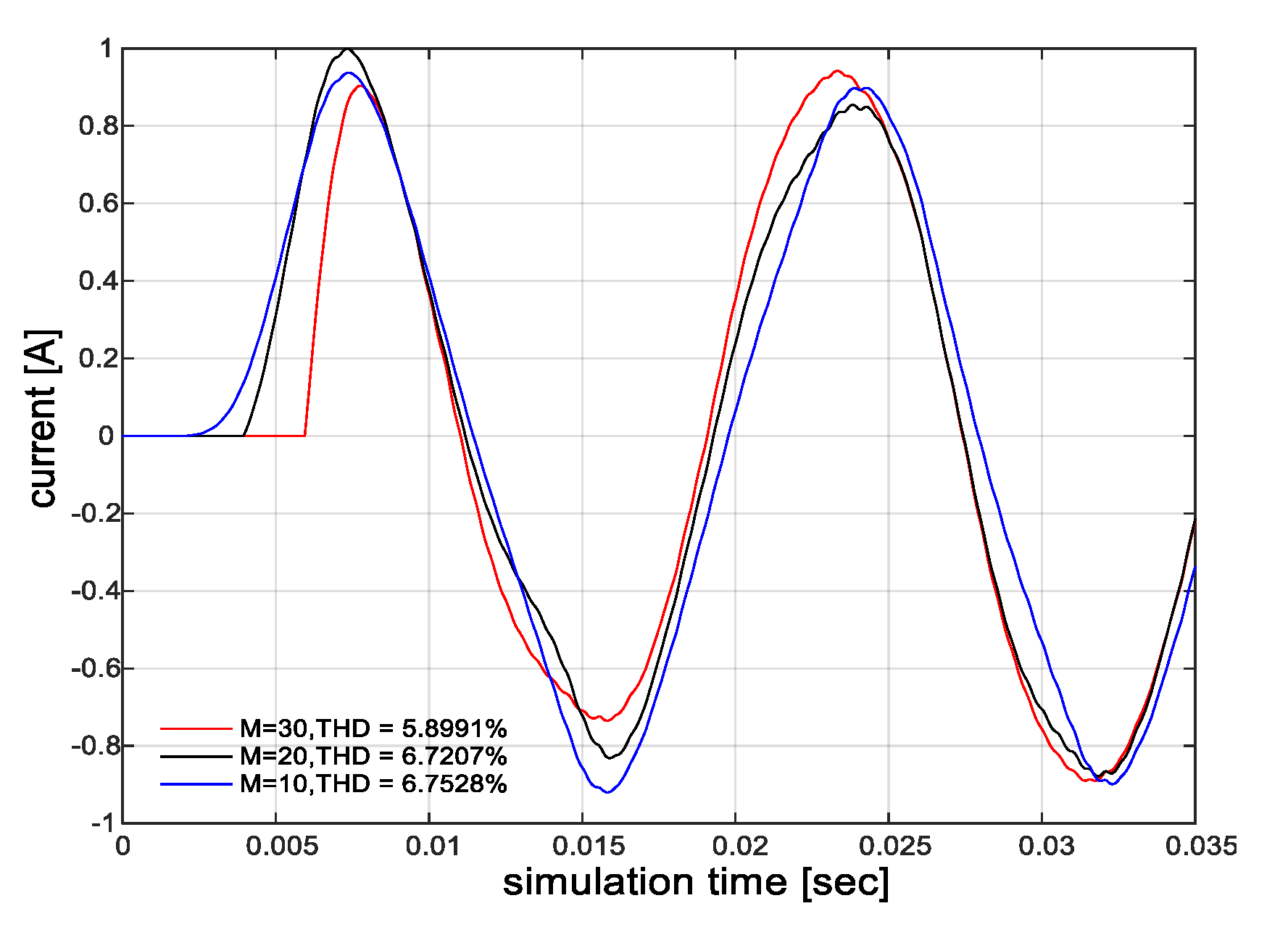
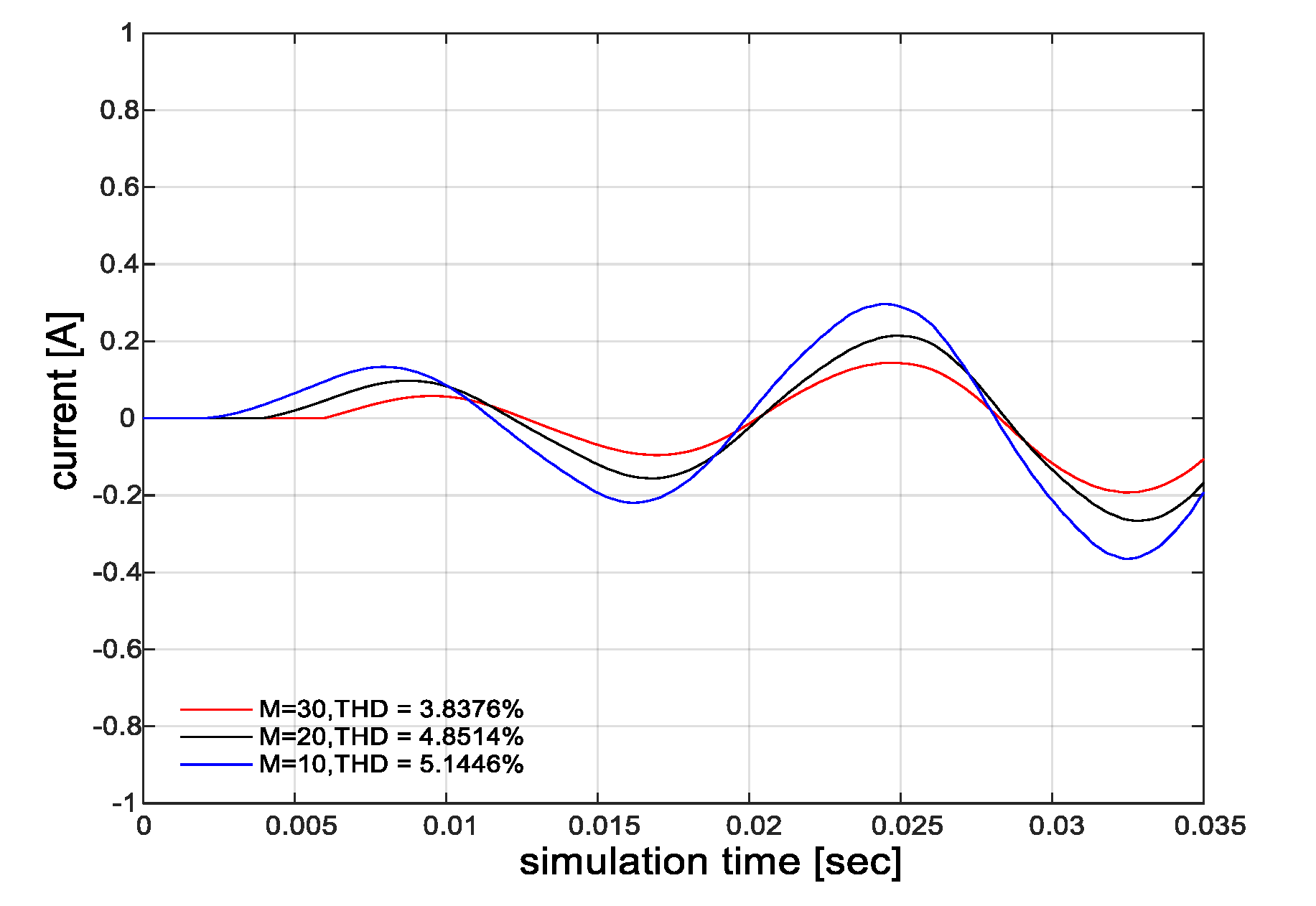
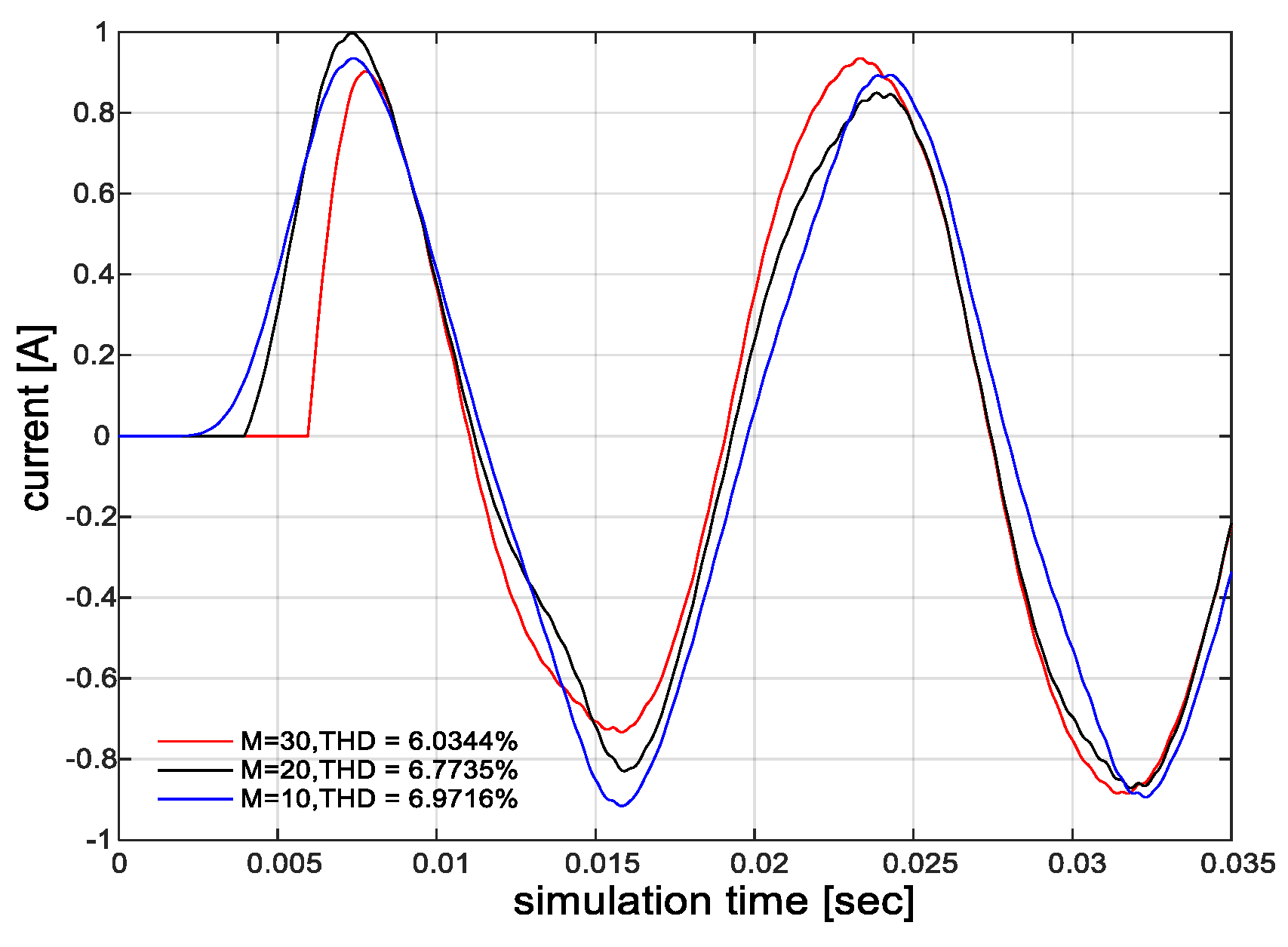
| 6.7528% | 5.1446% | 6.9716% | |
| 6.7207% | 4.8514% | 6.7735% | |
| 5.8991% | 3.8376% | 6.0344% |
| Step Size, | Filter Length, | Filter Length, | Filter Length, | ||||||
|---|---|---|---|---|---|---|---|---|---|
| LMS | NLMS | LLMS | LMS | NLMS | LLMS | LMS | NLMS | LLMS | |
| 0.001 | 0.0075s | 0.4500s | 0.0075s | 0.0075s | 0.3905s | 0.0074s | 0.0075s | 0.2403s | 0.0074s |
| 0.0001 | 0.1570s | 0.8800s | 0.1570s | 0.1405s | 0.8406s | 0.1566s | 0.1400s | 0.7408s | 0.1408s |
| 0.00001 | 0.6398s | 5.5402s | 0.6398s | 0.6245s | 5.3409s | 0.6308s | 0.6243s | 3.2406s | 0.6243s |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alhafadhi, L.; Teh, J.; Lai, C.-M.; Salem, M. Predictive Adaptive Filter for Reducing Total Harmonics Distortion in PV Systems. Energies 2020, 13, 3286. https://doi.org/10.3390/en13123286
Alhafadhi L, Teh J, Lai C-M, Salem M. Predictive Adaptive Filter for Reducing Total Harmonics Distortion in PV Systems. Energies. 2020; 13(12):3286. https://doi.org/10.3390/en13123286
Chicago/Turabian StyleAlhafadhi, Liqaa, Jiashen Teh, Ching-Ming Lai, and Mohamed Salem. 2020. "Predictive Adaptive Filter for Reducing Total Harmonics Distortion in PV Systems" Energies 13, no. 12: 3286. https://doi.org/10.3390/en13123286