Performance Improvement of a Hydraulic Active/Passive Heave Compensation Winch Using Semi Secondary Motor Control: Experimental and Numerical Verification


Abstract
:1. Introduction
- Primary controlled systems with variable-displacement pumps and fixed-displacement motors (VPFM) operated in the closed-circuit configuration.
- Primary controlled systems with variable-displacement pumps and variable-displacement motors (VPVM) operated in the closed-circuit configuration.
- Secondary control with a VPVM system operated in closed-circuit configuration with an in-line accumulator ensuring constant pressure.
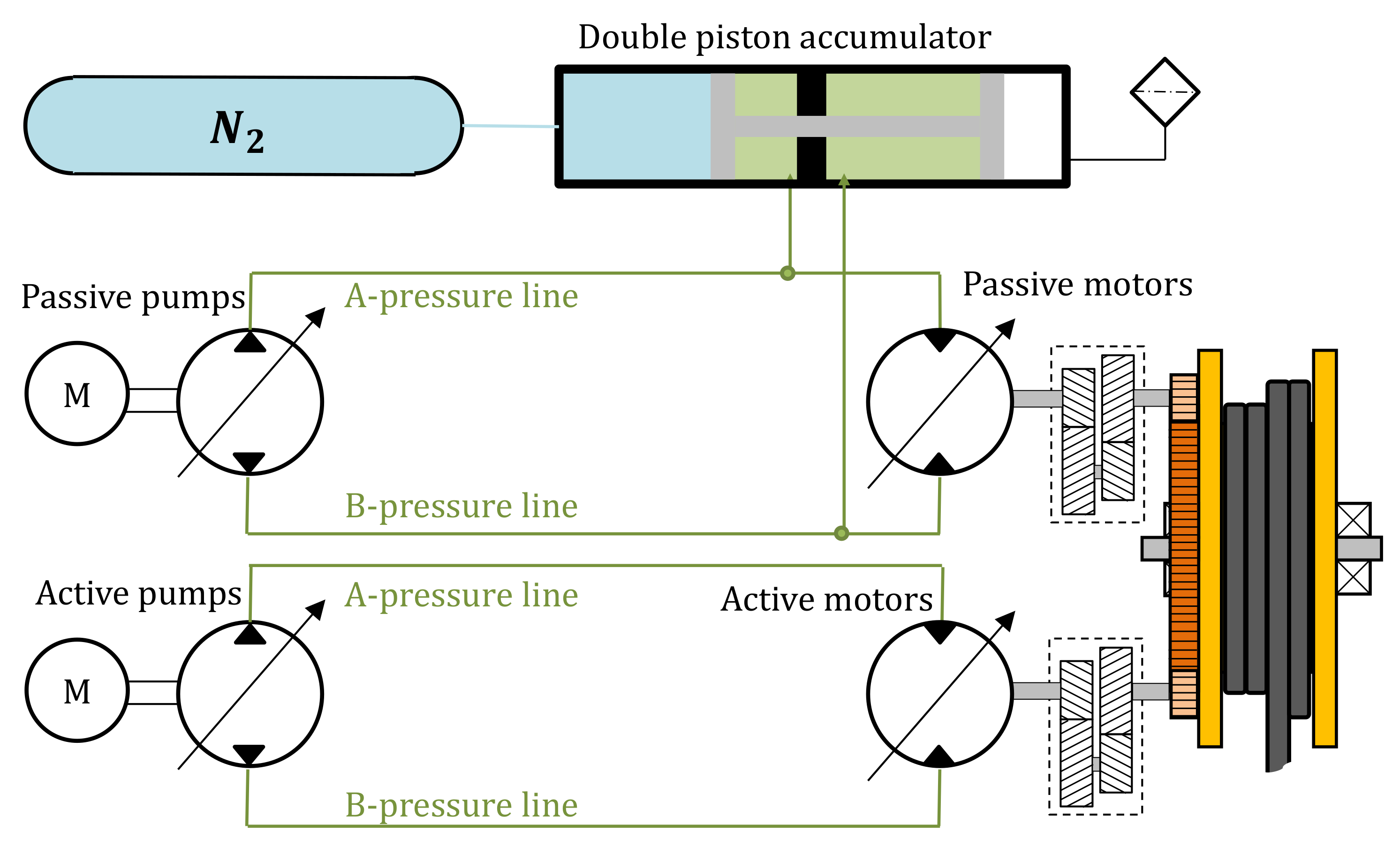
- Active/passive hydraulic systems (also known as “hybrid”) with two VPVM systems where one of them is secondary controlled, and the other one is primary controlled.
- Open-circuit systems with a power supply and a pressure-compensated proportional valve.
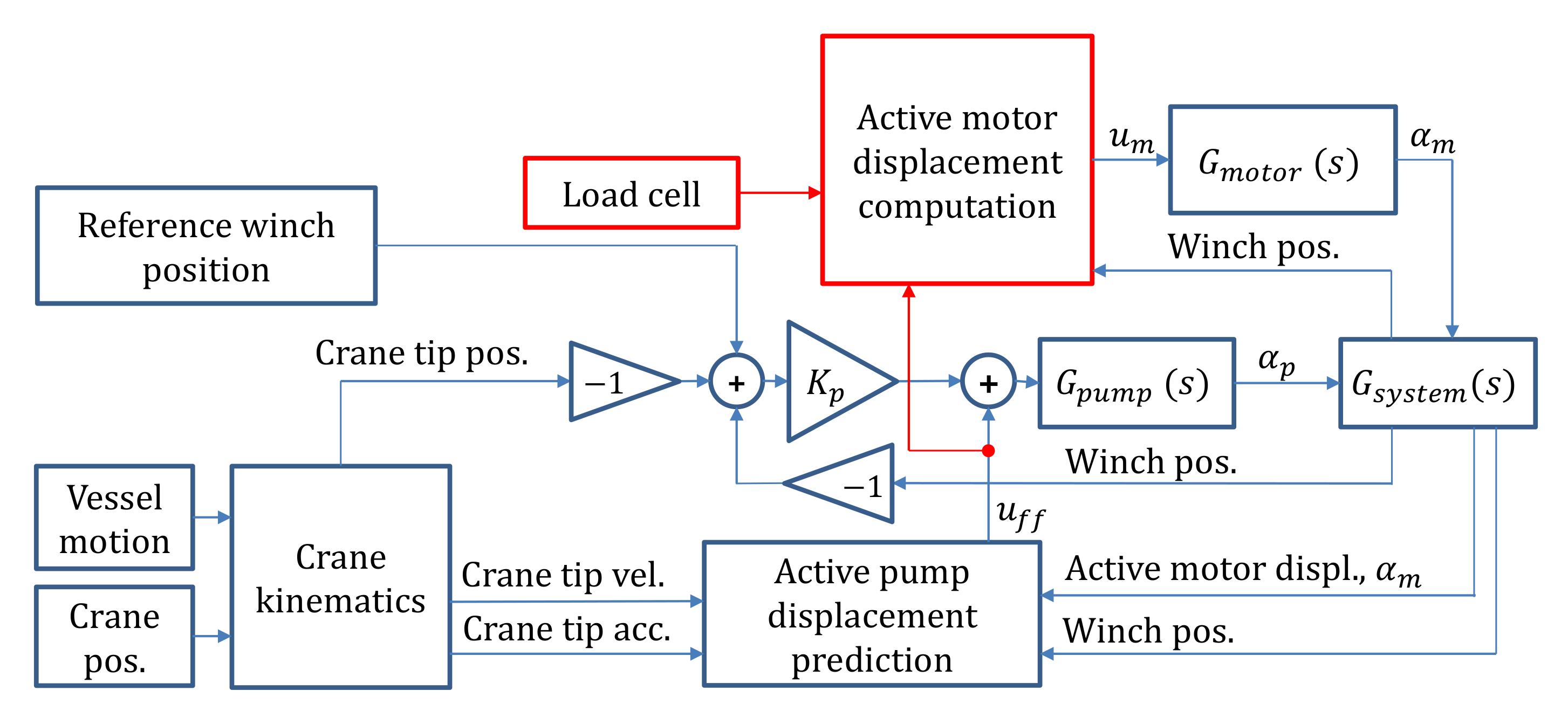
2. Control Algorithm and System Description
3. System Stability
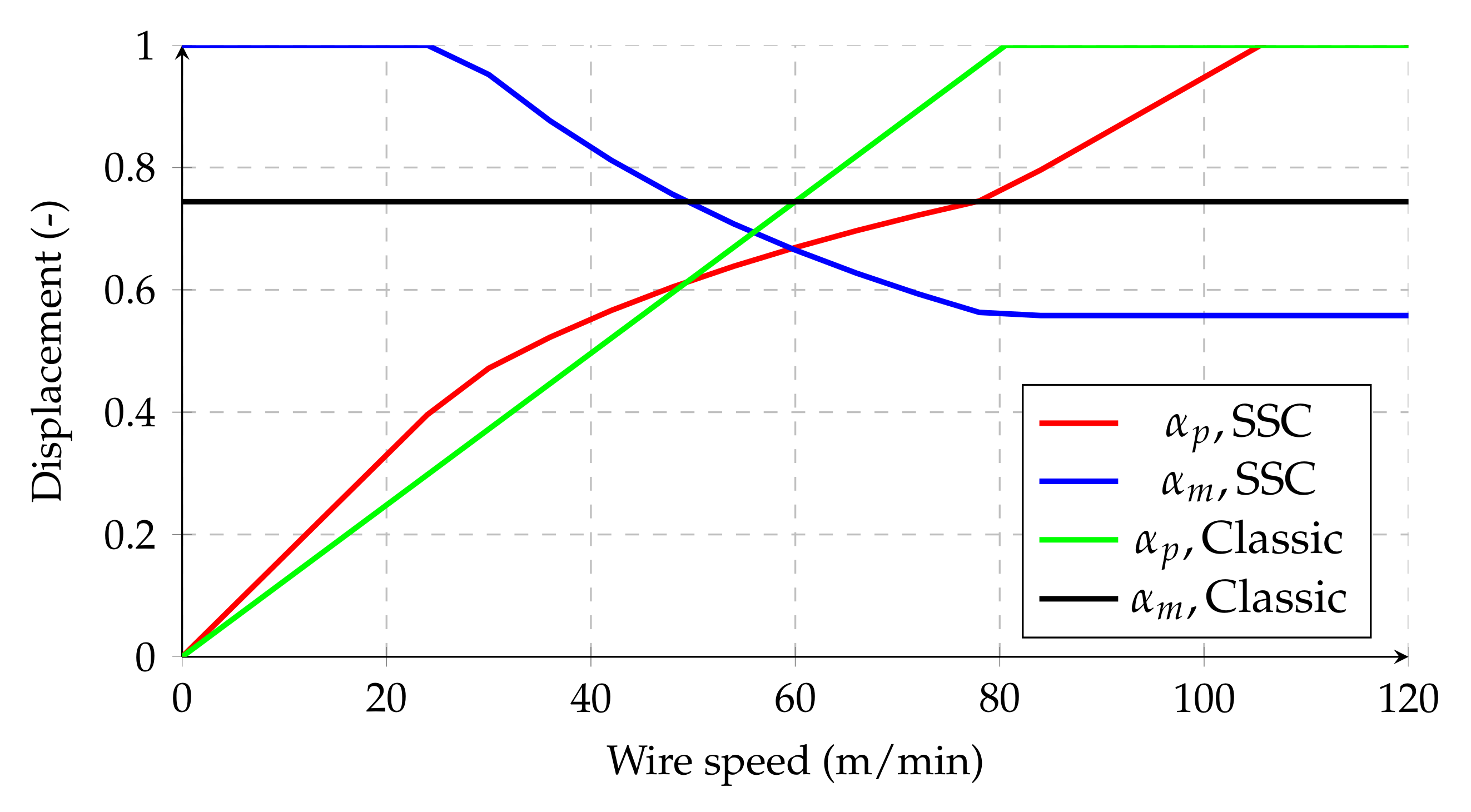
4. Comparison of the Classic and New Controller
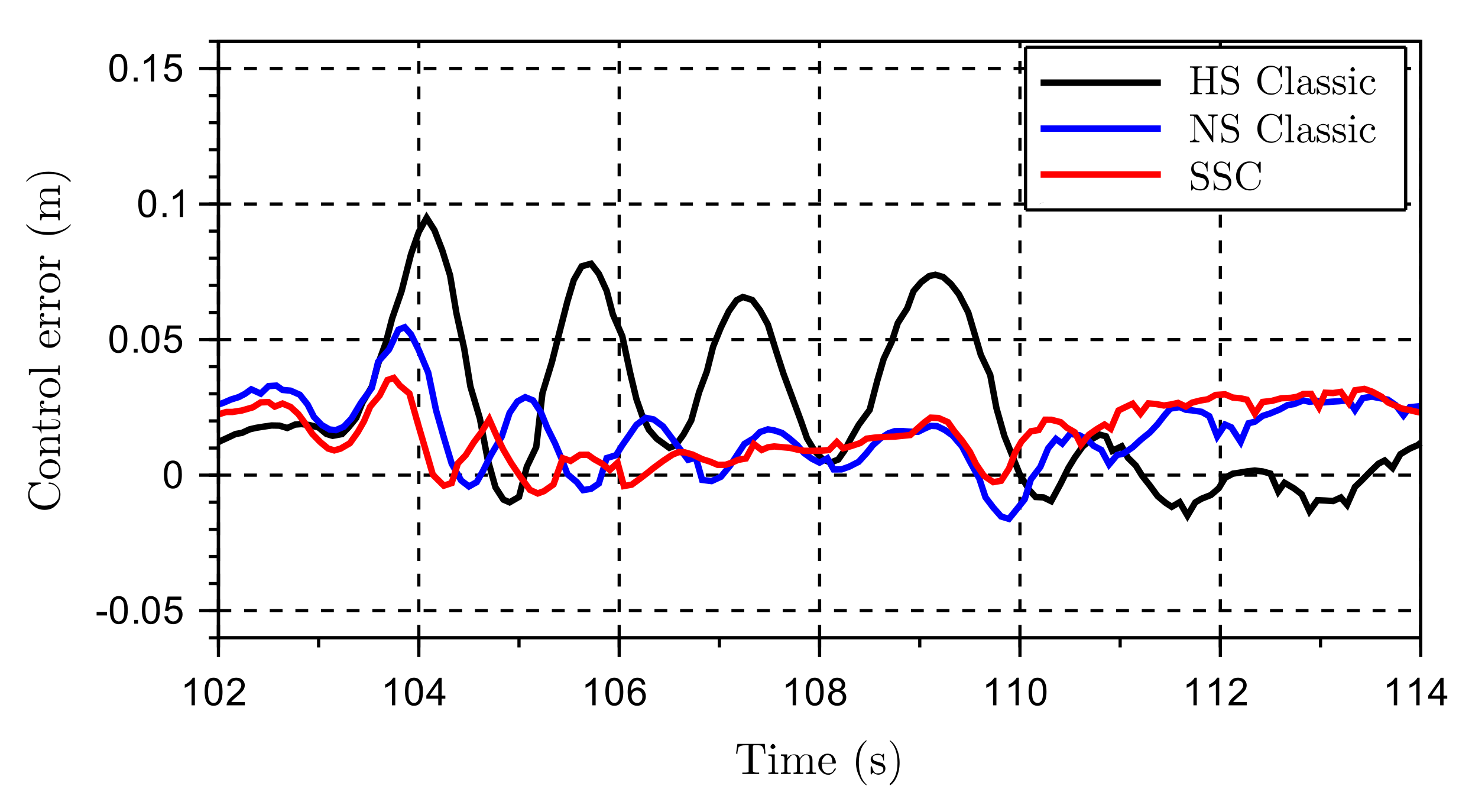
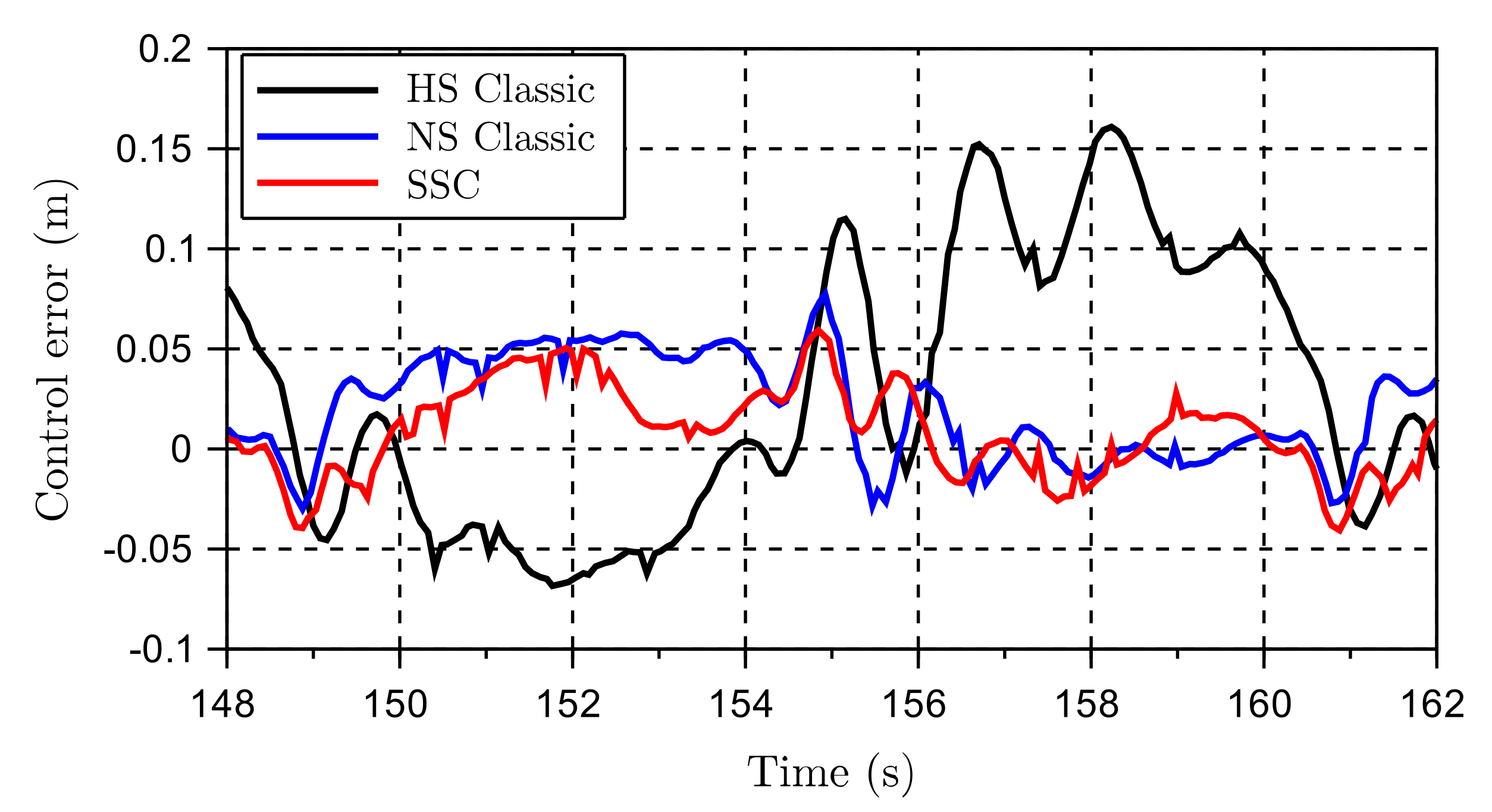
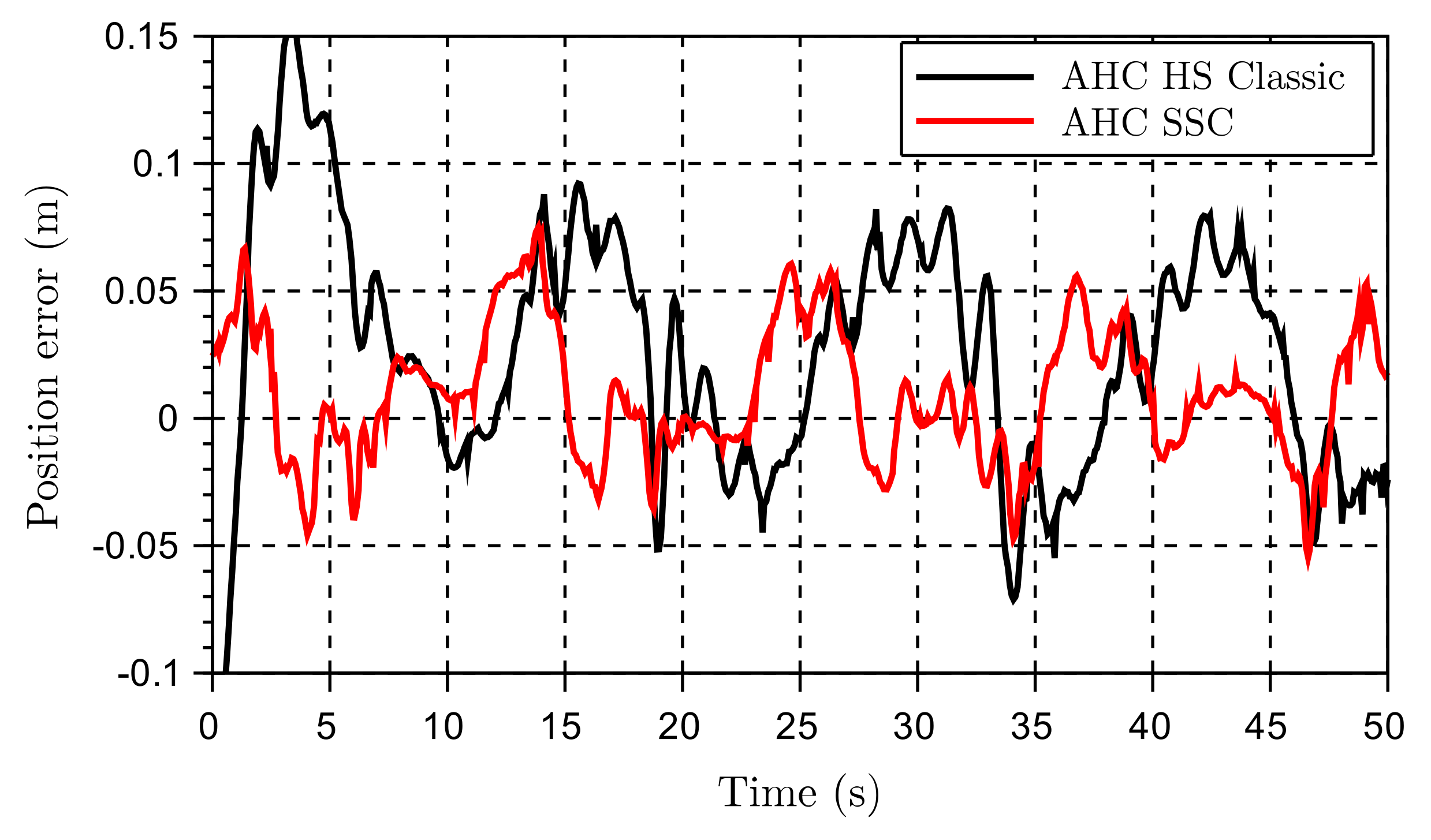
4.1. The Control Error
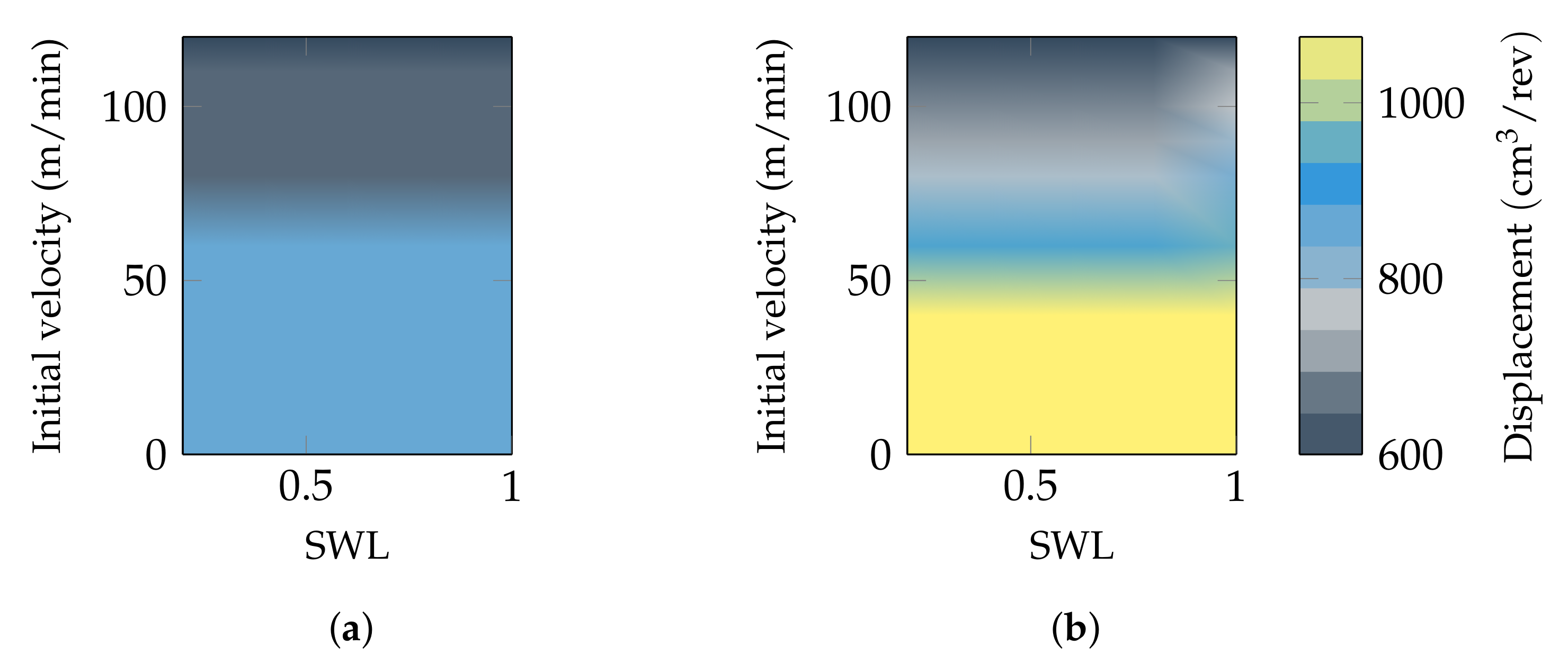
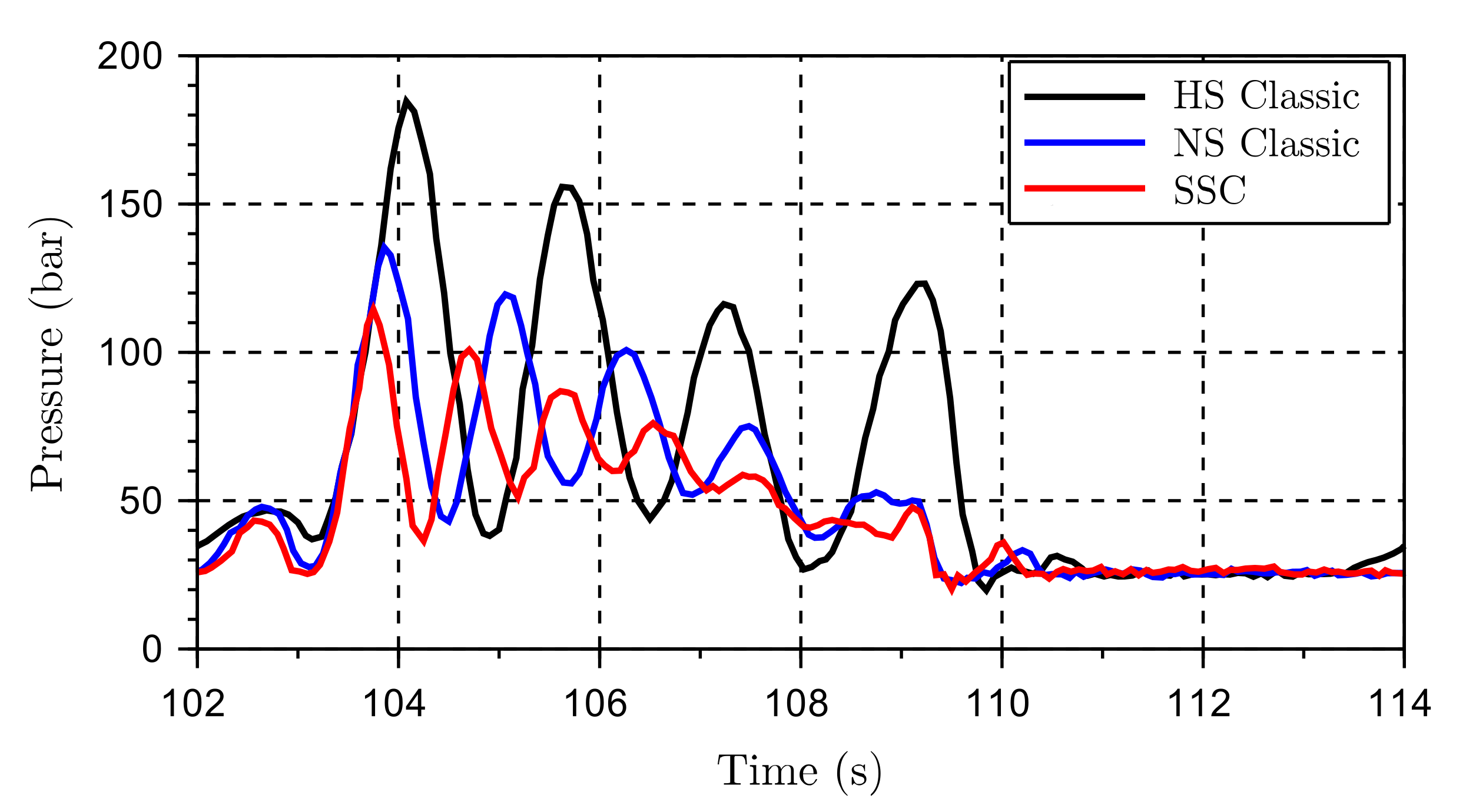
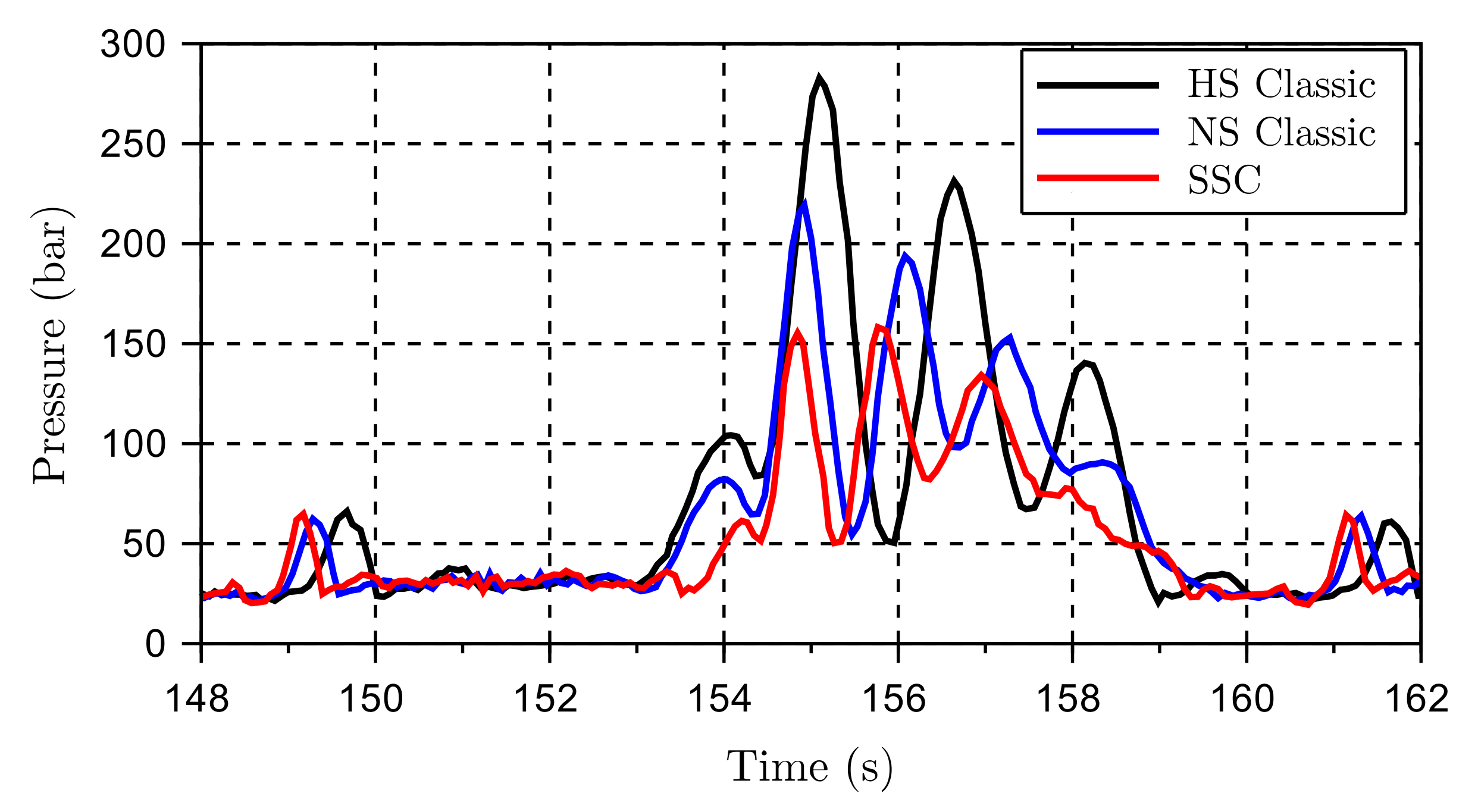
4.2. The Peak Pressures
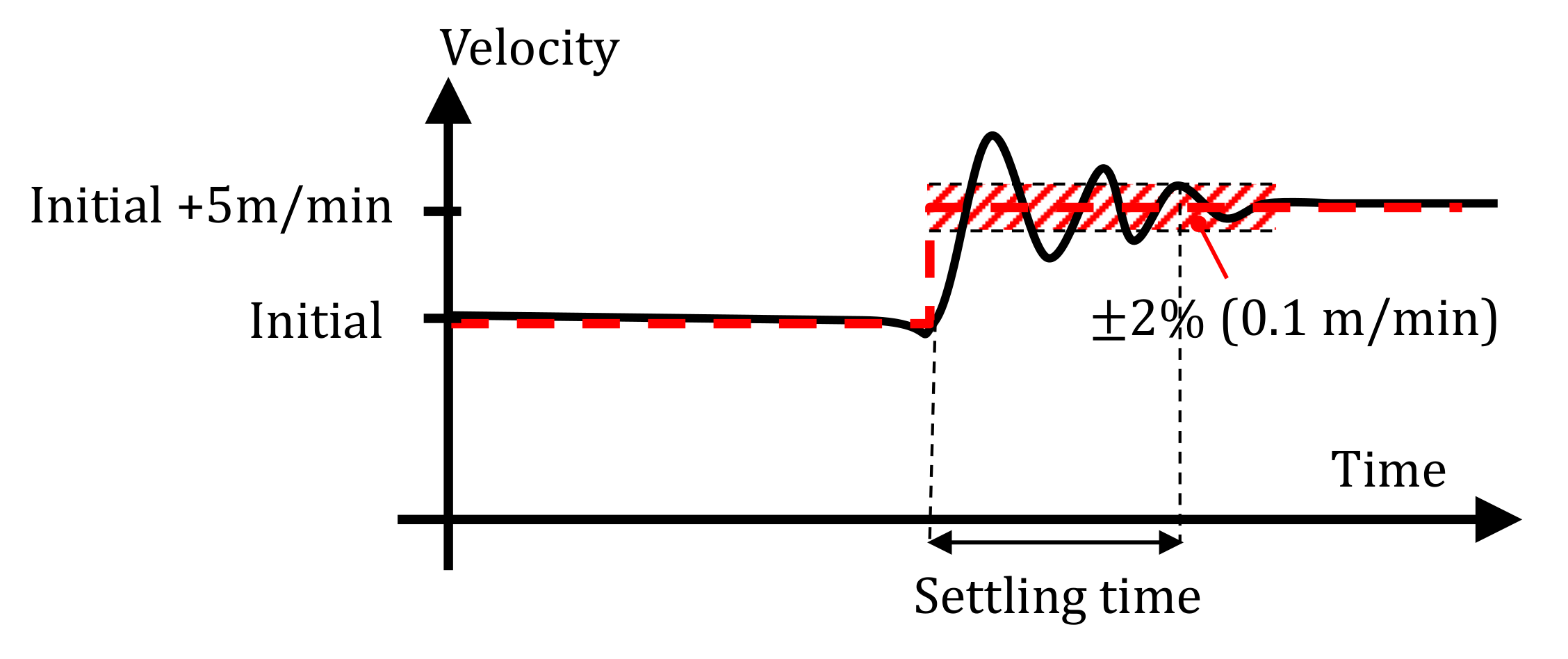
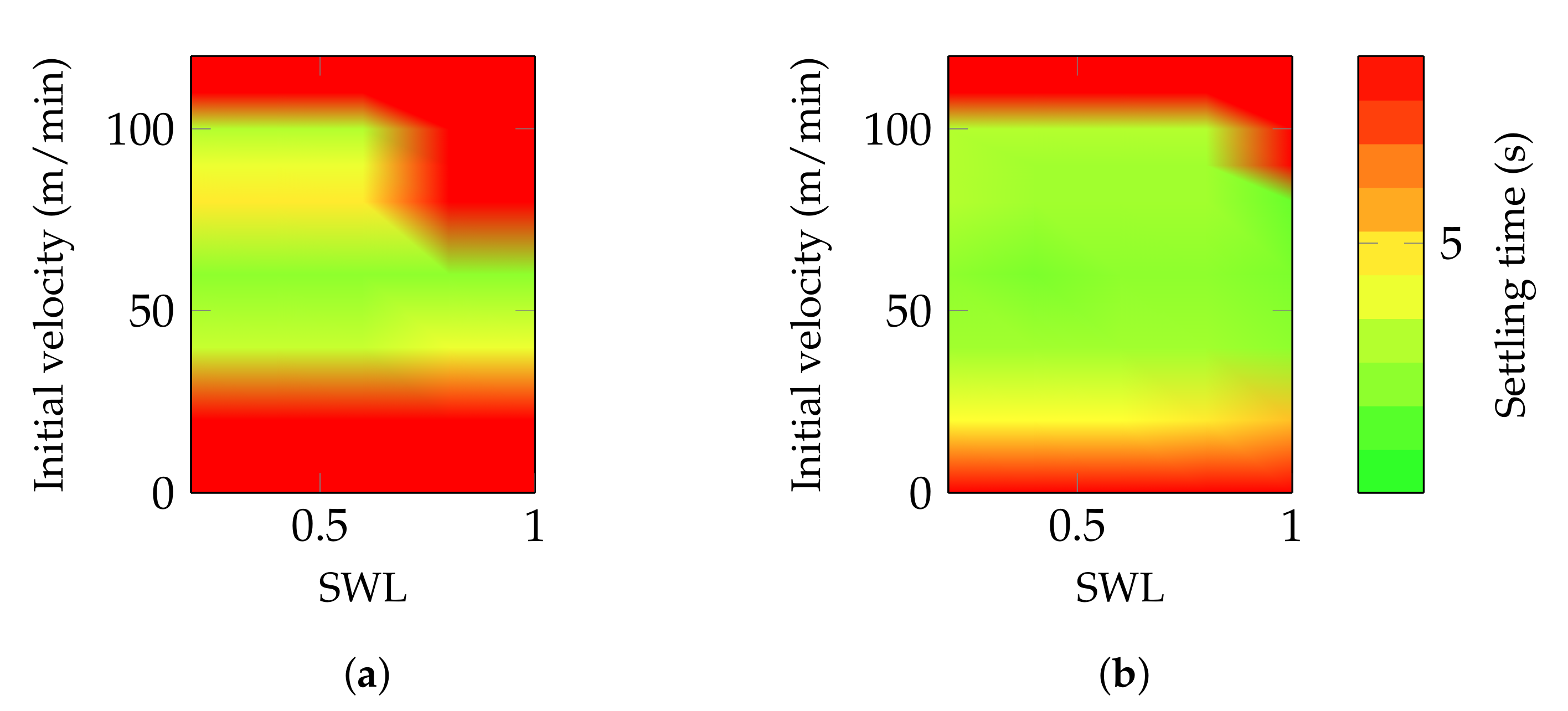
4.3. The Settling Time
5. Experimental Results
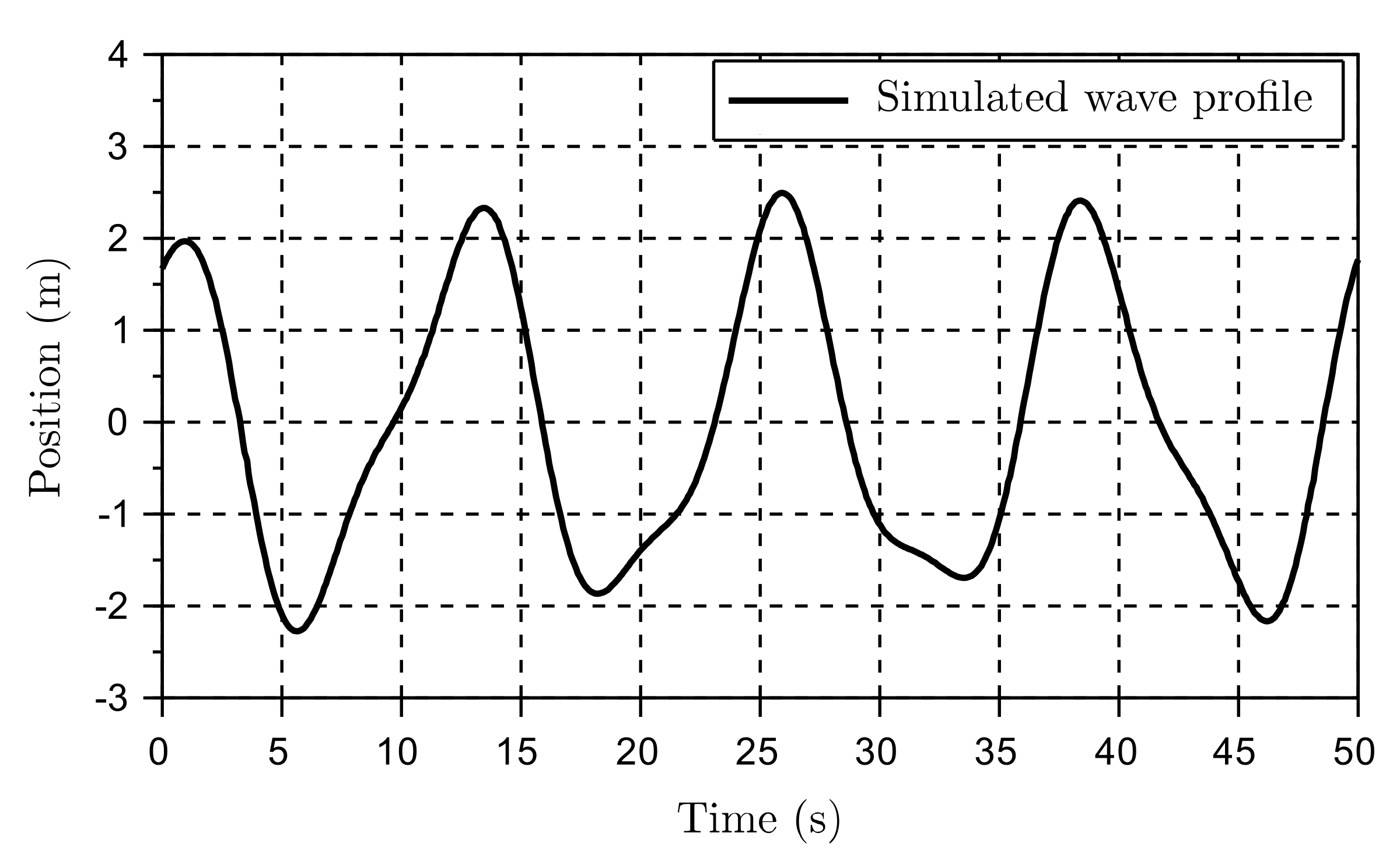
5.1. The Quayside Test
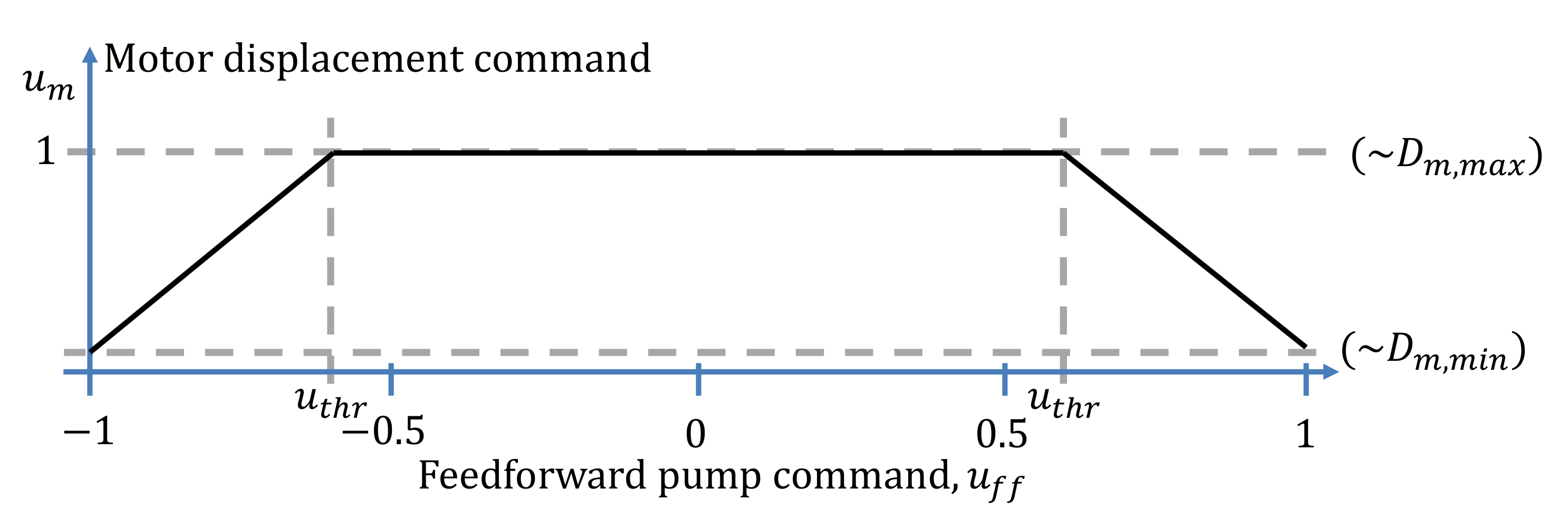
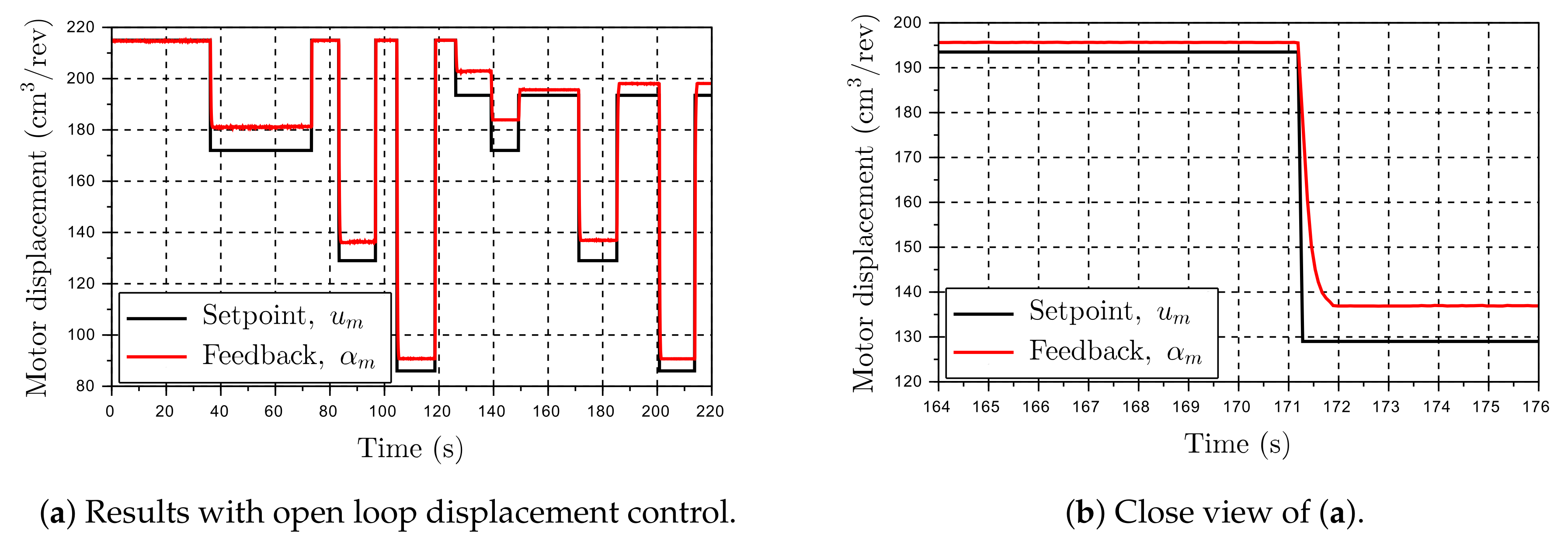
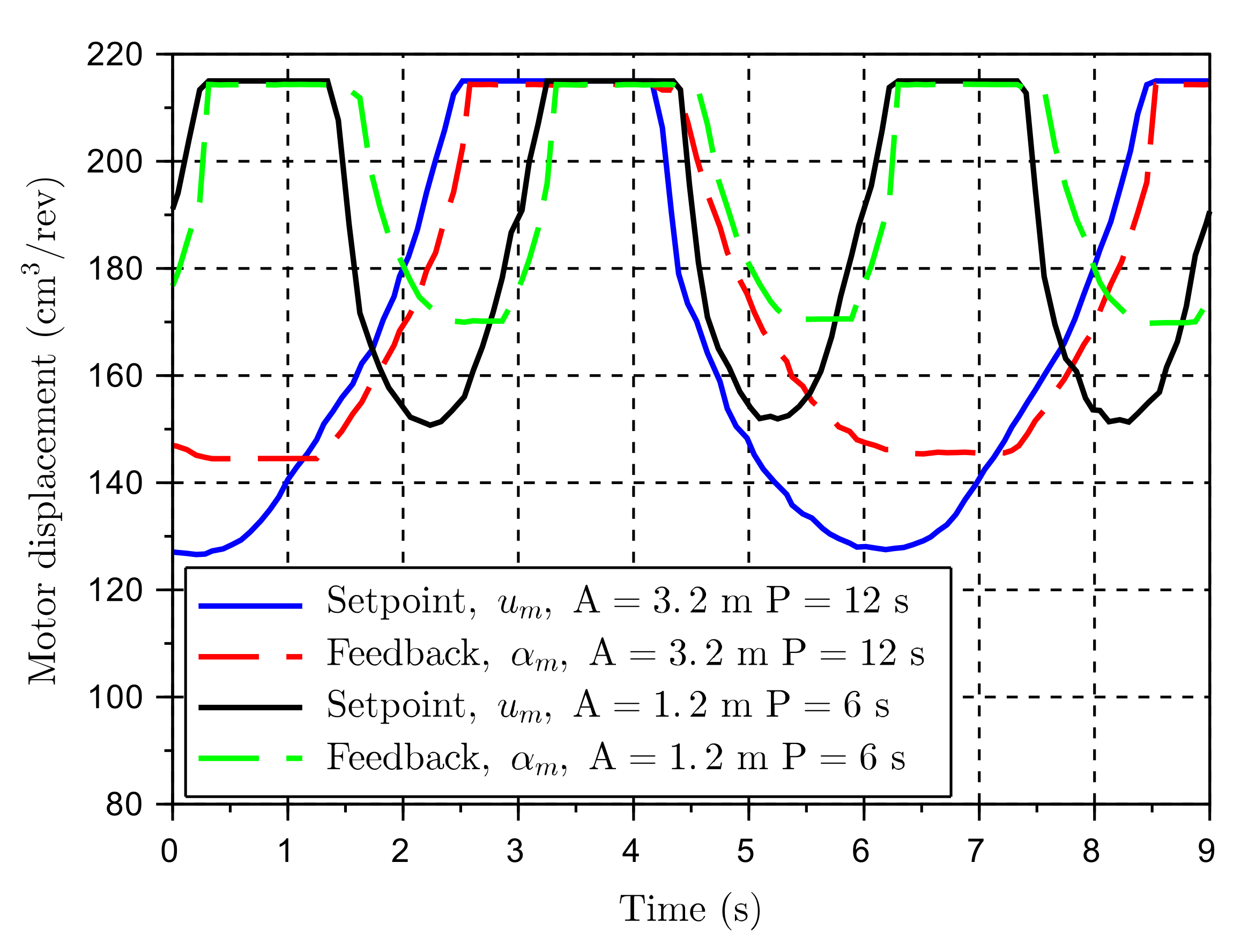
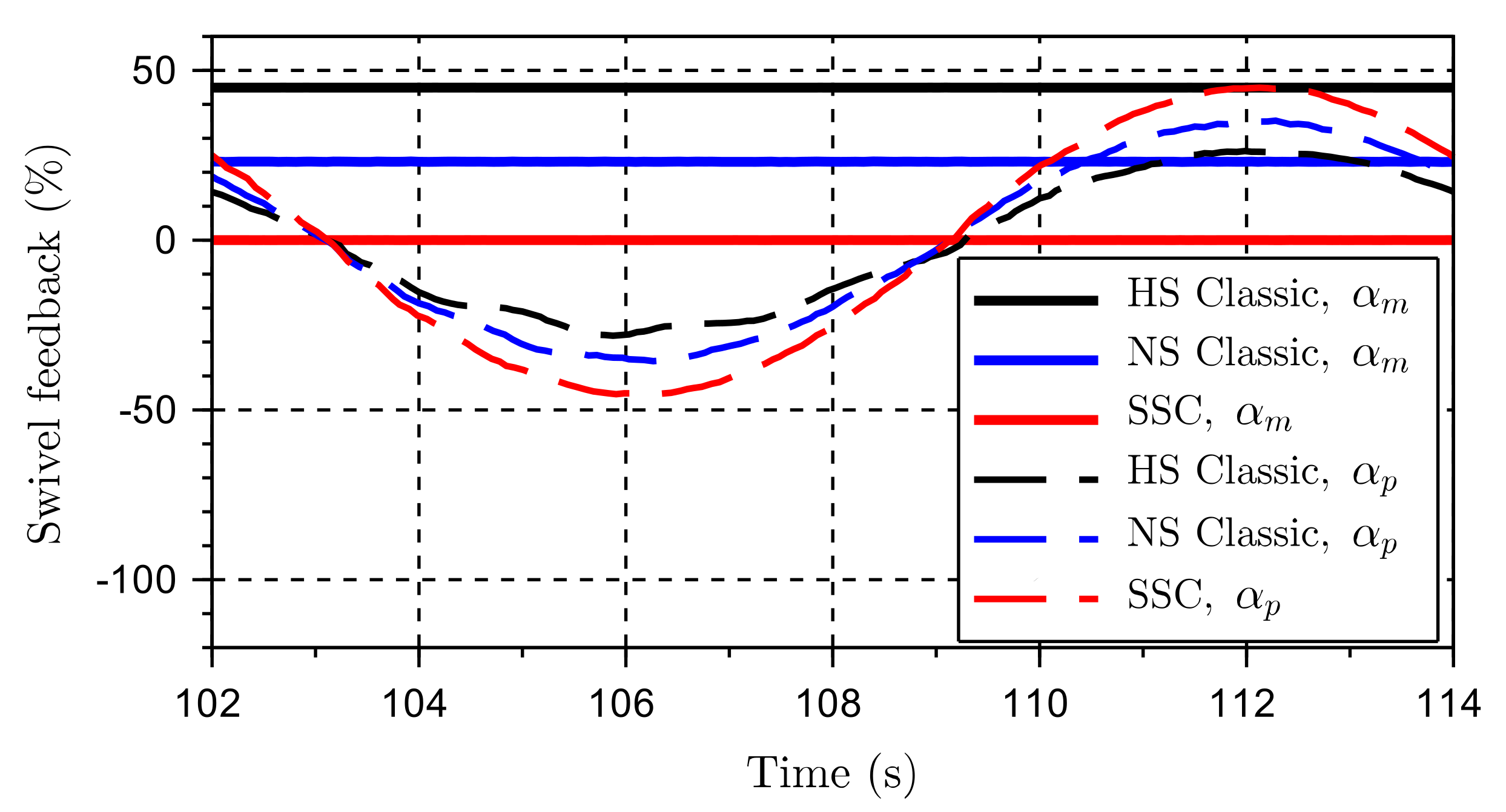
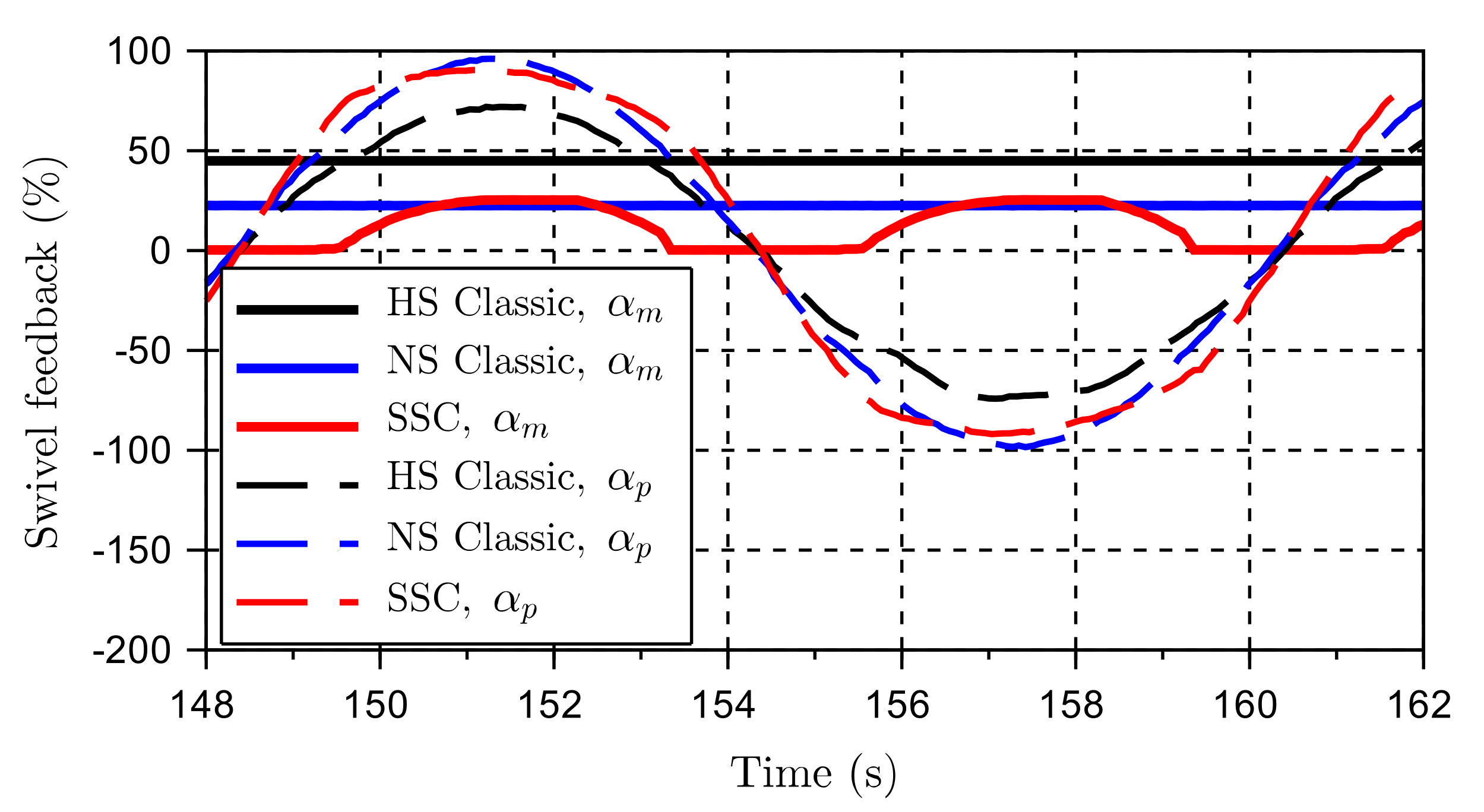
5.1.1. The Control of the Motors’ Displacement
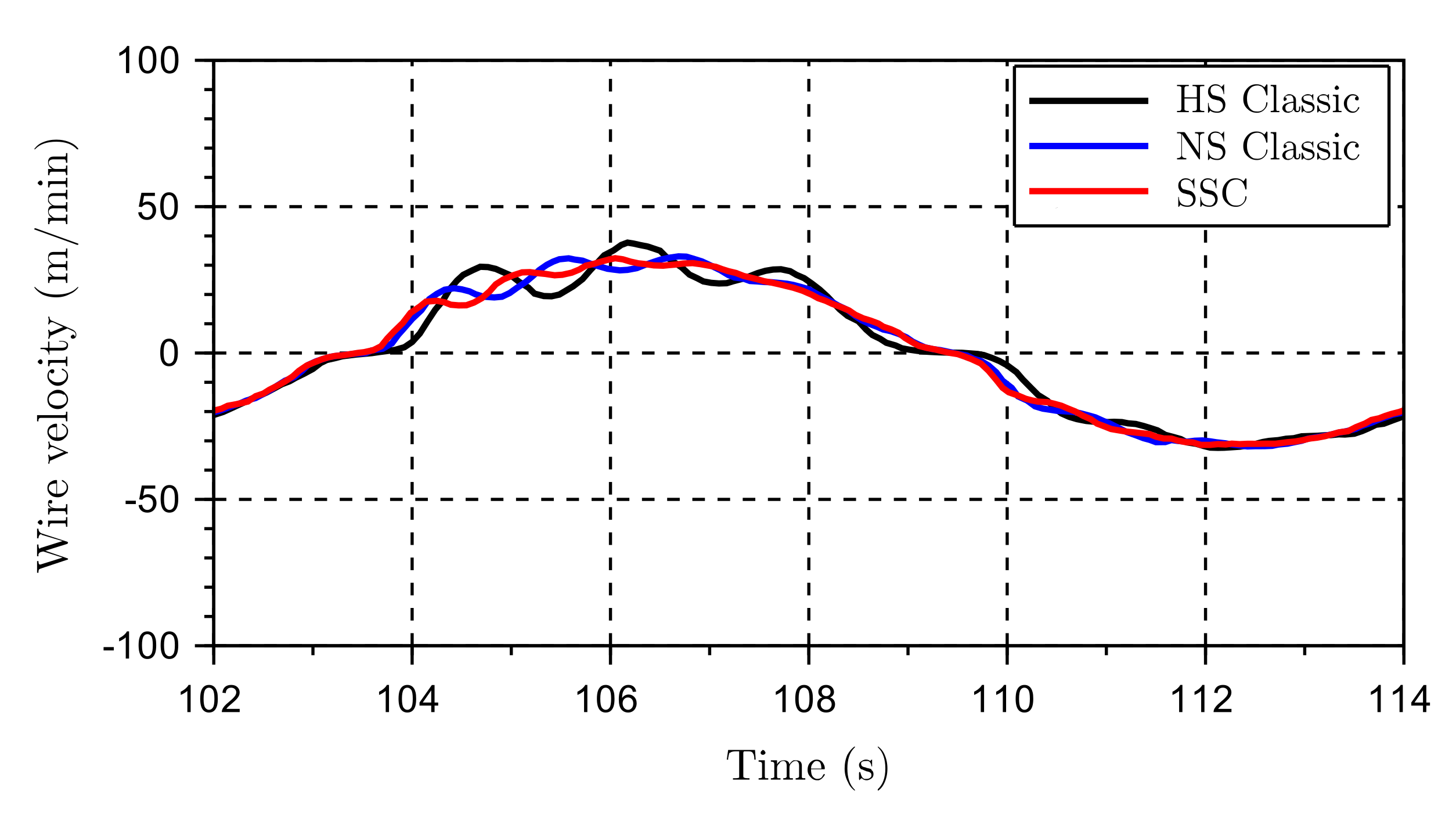
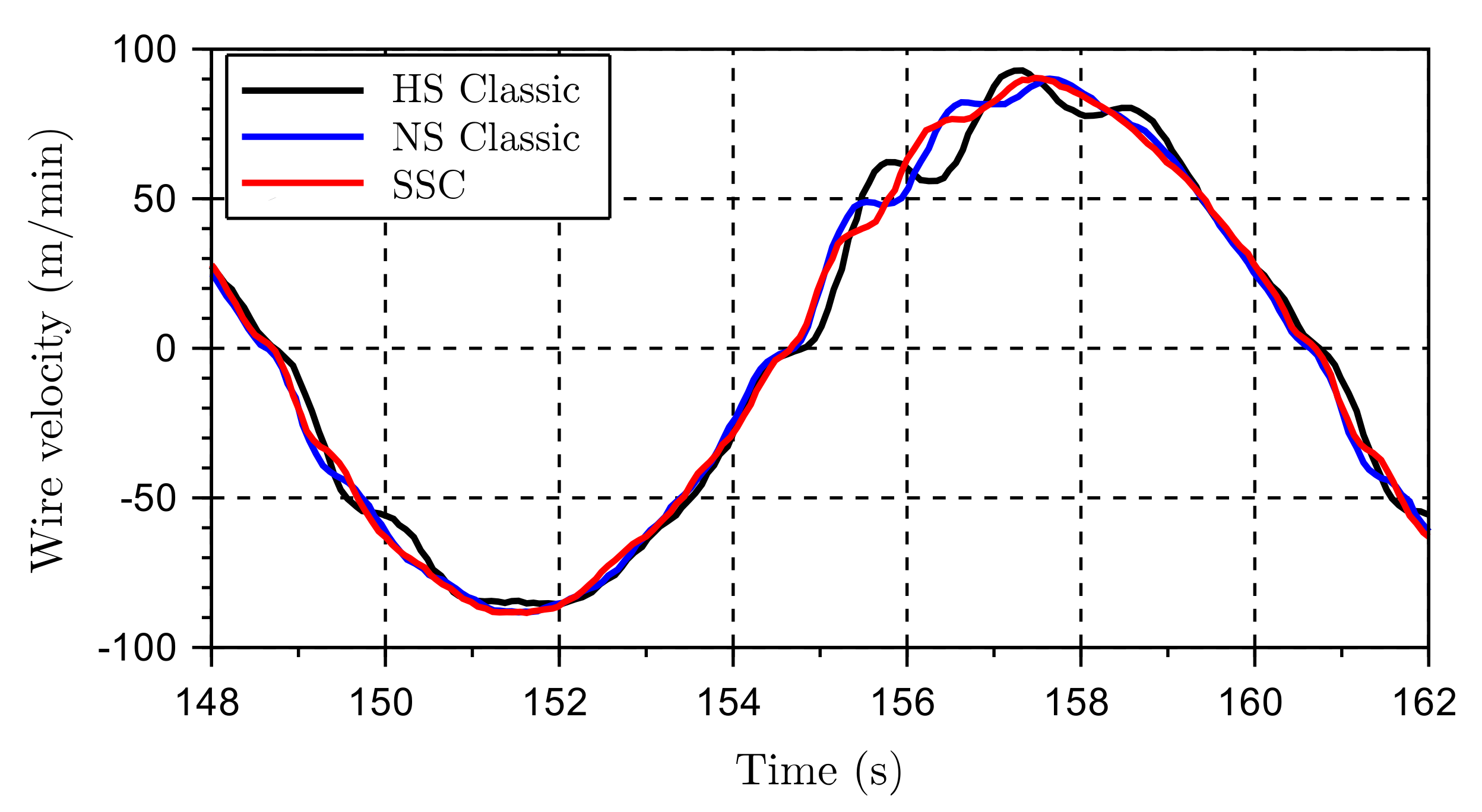
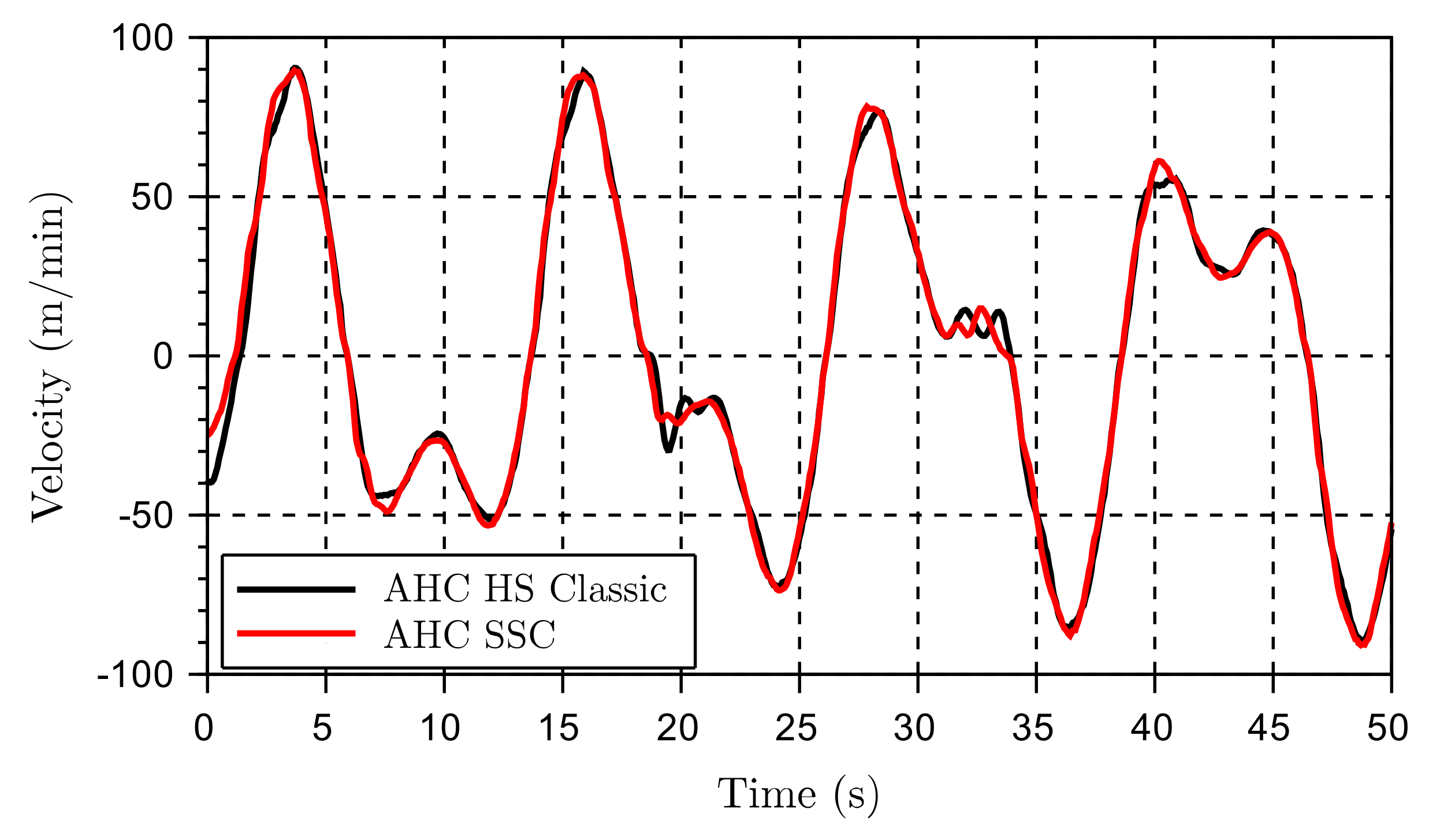
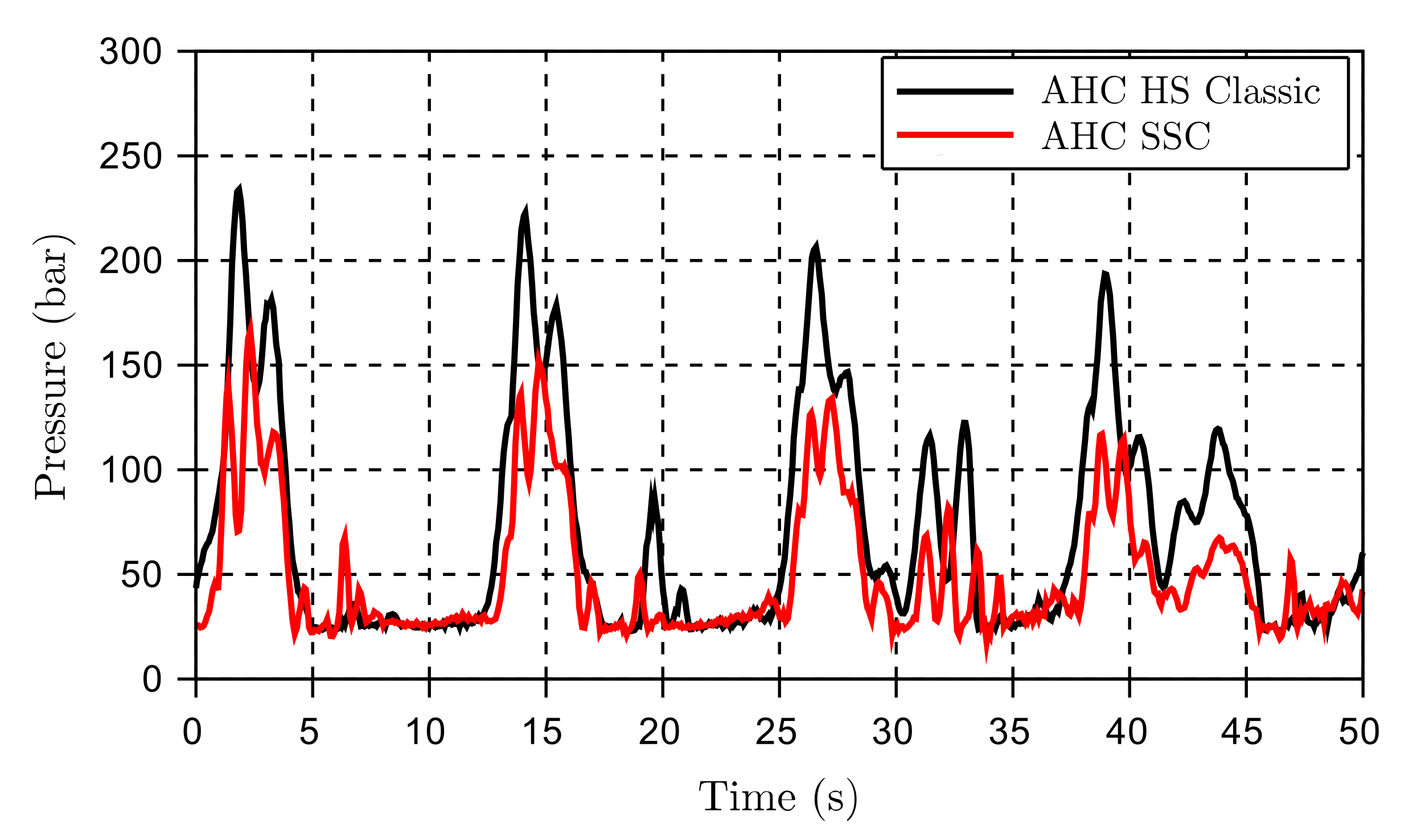
5.1.2. The Winch Performance
5.2. Discussion of the Results
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| Motor displacement feedback | |
| Pump displacement feedback | |
| Rotational velocity of motor shaft | |
| Natural eigenfrequency of motor displacement control | |
| Natural eigenfrequency of pump displacement control | |
| Damping ratio of motor displacement control | |
| Damping ratio of pump displacement control | |
| Laplace transform of | |
| Laplace transformed | |
| Laplace transform of | |
| Laplace transformed | |
| Crane tip acceleration | |
| Maximum drum diameter | |
| Maximum motor displacement | |
| Minimum allowable motor displacement | |
| E | Laplace transform of e |
| e | Controller error |
| Transmission ratio between hydraulic motor shaft rotation and drum | |
| Total inertia on motor shaft | |
| Proportional gain for crane tip velocity in feedforward controller | |
| Proportional gain for crane tip acceleration in feedforward controller | |
| Laminar leakage factor | |
| Proportional gain for feedback control error | |
| Factor for motor displacement reduction | |
| Drum diameter factor | |
| Laplace transform of | |
| Pressure A side | |
| Pressure B side | |
| Laplace transform of | |
| Laplace transformed | |
| Feedforward signal | |
| Laplace transform of | |
| Laplace transformed | |
| Command signal for motor displacement control | |
| Laplace transform of | |
| Command signal for pump displacement control | |
| Laplace transform of | |
| Threshold value for when to start reducing motor displacement | |
| Laplace transform of | |
| Laplace transformed | |
| Crane tip velocity | |
| Laplace transform of | |
| Laplace transformed | |
| Wire velocity | |
| Laplace transform of | |
| AHC | Active heave compensation |
| AHC HS | Active heave compensation, high-speed mode |
| AHC NS | Active heave compensation, normal speed mode |
| FTC | Fault tolerant control |
| HST | Hydrostatic transmission |
| MPC | Model-based control |
| NOV | National Oilwell Varco |
| VPFM | Variable pumps and fixed motors |
| VPVM | Variable pumps and variable motors |
| SSC | Semi secondary control |
| SWL | Safe working load |
References
- Woodacre, J.K.; Bauer, R.J.; Irani, R.A. A review of vertical motion heave compensation systems. Ocean Eng. 2015, 104, 140–154. [Google Scholar] [CrossRef]
- Feuser, A. Hydrostatic Drives with Control of the Secondary Unit; Mannesmann Rexroth GmbH: Lohr am Main, Germany, 1989; Volume 6. [Google Scholar]
- Palmgren, G.; Rydberg, K.E. Secondary Controlled Systems—Energy Aspects and Control Strategies. In Proceedings of the International Conference on Fluid Power, Tampere, Finland, 24–26 March 1987. [Google Scholar]
- Bosch Rexroth, A.G. Drive and Control Solutions for Marine Engineering: Reliable, Efficient, Durable; Rexroth Bosch B.V., Netherlands. Available online: https://dc-us.resource.bosch.com/media/us/products_13/product_groups_1/industrial_hydraulics_5/pdfs_4/R999001175_2015-1.pdf (accessed on 24 May 2020).
- Marien, M.; Wiig, K.E.; Ebbesen, M.K. Secondary Control of a Digital Hydraulic Motor for Winch Applications. Master’s Thesis, University of Agder, Kristiansand S, Norway, 2018. [Google Scholar]
- Padovani, D.; Ivantysynova, M. The Concept of Secondary Controlled Hydraulic Motors Applied to the Propulsion System of a Railway Machine. In Proceedings of the 14th Scandinavian International Conference on Fluid Power, Tampere, Finland, 20–22 May 2015. [Google Scholar]
- Padovani, D.; Ivantysynova, M. Simulation and Analysis of Non-Hybrid Displacement-Controlled Hydraulic Propulsion Systems Suitable for Railway Applications. In Proceedings of the ASME/BATH 2015 Symposium on Fluid Power and Motion Control, Chicago, IL, USA, 12–14 October 2015; p. 11. [Google Scholar] [CrossRef]
- Nikolaus, H. Antriebssystem mit hydrostatischer Kraftubertragung. Deutsches Patent 27,399,684, 6 September 1977. [Google Scholar]
- Moslått, G.A.; Padovani, D.; Hansen, M.R. A Control Algorithm for Active/Passive Hydraulic Winches Used in Active Heave Compensation. In Proceedings of the ASME/BATH 2019 Symposium on Fluid Power and Motion Control; American Society of Mechanical Engineers, Sarasota, FL, USA, 7–9 October; 2019; p. 11. [Google Scholar] [CrossRef]
- Kaddissi, C.; Kenne, J.P.; Saad, M. Identification and Real-Time Control of an Electrohydraulic Servo System Based on Nonlinear Backstepping. IEEE/ASME Trans. Mechatron. 2007, 12, 12–22. [Google Scholar] [CrossRef]
- Yao, J.; Jiao, Z.; Ma, D. Extended-state-observer-based output feedback nonlinear robust control of hydraulic systems with backstepping. IEEE Trans. Ind. Electron. 2014, 61, 6285–6293. [Google Scholar] [CrossRef]
- Mahulkar, V.; Adams, D.E.; Derriso, M. Adaptive fault tolerant control for hydraulic actuators. In Proceedings of the American Control Conference, American Automatic Control Council, Chicago, IL, USA, 1–3 July 2015; Volume 2015, pp. 2242–2247. [Google Scholar] [CrossRef]
- Yao, J.; Jiao, Z.; Ma, D.; Yan, L. High-accuracy tracking control of hydraulic rotary actuators with modeling uncertainties. IEEE/ASME Trans. Mechatron. 2014, 19, 633–641. [Google Scholar] [CrossRef]
- Yao, B.; Bu, F.; Reedy, J.; Chiu, G.T. Adaptive robust motion control of single-rod hydraulic actuators: Theory and experiments. IEEE/ASME Trans. Mechatron. 2000, 5, 79–91. [Google Scholar] [CrossRef]
- Yao, J.; Deng, W.; Jiao, Z. Adaptive control of hydraulic actuators with LuGre model-based friction compensation. IEEE Trans. Ind. Electron. 2015, 62, 6469–6477. [Google Scholar] [CrossRef]
- Yao, J.; Jiao, Z.; Ma, D. A Practical Nonlinear Adaptive Control of Hydraulic Servomechanisms with Periodic-Like Disturbances. IEEE/ASME Trans. Mechatron. 2015, 20, 2752–2760. [Google Scholar] [CrossRef]
- Do, H.T.; Ahn, K.K. Velocity control of a secondary controlled closed-loop hydrostatic transmission system using an adaptive fuzzy sliding mode controller. J. Mech. Sci. Technol. 2013, 27, 875–884. [Google Scholar] [CrossRef]
- Meller, M.; Kogan, B.; Bryant, M.; Garcia, E. Model-based feedforward and cascade control of hydraulic McKibben muscles. Sens. Actuators A Phys. 2018, 275, 88–98. [Google Scholar] [CrossRef]
- Chatzakos, P.; Papadopoulos, E. On model-based control of hydraulic actuators. Proc. RAAD 2003, 3, 7–10. [Google Scholar]
- Rezayi, S.; Arbabtafti, M. A New Model-Based Control Structure for Position Tracking in an Electro-Hydraulic Servo System with Acceleration Constraint. J. Dyn. Syst. Meas. Control 2017, 139. [Google Scholar] [CrossRef]
- Guan, C.; Pan, S. Adaptive sliding mode control of electro-hydraulic system with nonlinear unknown parameters. Control Eng. Pract. 2008, 16, 1275–1284. [Google Scholar] [CrossRef]
- Zheng, S.; Wang, X.; Lu, Y.; Wang, Y. The sliding mode control for speed system of the variable displacement motor at the constant pressure network. In Proceedings of the 2013 International Conference on Intelligent Control and Information Processing, ICICIP 2013, Beijing, China, 9–11 June 2013; pp. 499–503. [Google Scholar] [CrossRef]
- Liu, S.; Guo, Q.; Zhao, W. Research on active heave compensation for offshore crane. In Proceedings of the 26th Chinese Control and Decision Conference, CCDC 2014, Changsha, China, 31 May–2 June 2014; pp. 1768–1772. [Google Scholar] [CrossRef]
- Shi, M.; Guo, S.; Jiang, L.; Huang, Z. Active-Passive Combined Control System in Crane Type for Heave Compensation. IEEE Access 2019, 7, 159960–159970. [Google Scholar] [CrossRef]
- Michel, A.; Kemmetmüller, W.; Kugi, A. Modeling and control of an active heave compensation system for offshore cranes. At-Automatisierungstechnik 2012, 60, 8–15. [Google Scholar] [CrossRef]
- Sanders, R. Modelling and Simulation of Traditional Hydraulic Heave Compensation Systems; Technical Report; University of Twente, Faculty of Engineering Technology: Enschede, The Netherlands, 2016. [Google Scholar]
- Wu, J.; Wu, D. Integrated design of an active heave compensation crane with hydrostatic secondary control. In Proceedings of the OCEANS 2018 MTS/IEEE Charleston, OCEAN 2018, Charleston, SC, USA, 22–25 October 2018; pp. 1–7. [Google Scholar] [CrossRef]
- Donkov, V.; Andersen, T.; Ebbesen, M.K.; Linjama, M.; Paloniitty, M. Investigation of the fault tolerance of digital hydraulic cylinders. In Proceedings of the 16th Scandinavian International Conference on Fluid Power, Tampere, Finland, 22–24 May 2019. [Google Scholar]
- Dijoux, E.; Steiner, N.Y.; Benne, M.; Péra, M.C.; Pérez, B.G. A review of fault tolerant control strategies applied to proton exchange membrane fuel cell systems. J. Power Sources 2017, 359, 119–133. [Google Scholar] [CrossRef] [Green Version]
- Küchler, S.; Mahl, T.; Neupert, J.; Schneider, K.; Sawodny, O. Active control for an offshore crane using prediction of the vessels motion. IEEE/ASME Trans. Mechatron. 2011, 16, 297–309. [Google Scholar] [CrossRef]
- Kusters, J.G.; Cockrell, K.L.; Connell, B.S.; Rudzinsky, J.P.; Vinciullo, V.J. FutureWaves™: A real-time Ship Motion Forecasting system employing advanced wave-sensing radar. In Proceedings of the OCEANS 2016 MTS/IEEE Monterey, OCE 2016, Monterey, CA, USA, 19–23 September 2016; pp. 1–9. [Google Scholar] [CrossRef]
- Del Re, L.; Goransson, A.; Astolfi, A. Enhancing Hydrostatic Gear Efficiency Through Nonlinear Optimal Control Strategies. J. Dyn. Syst. Meas. Control 1996, 118, 727–732. [Google Scholar] [CrossRef]




























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Description | Total Size |
|---|---|
| Active motors | 1075 cm/rev |
| Passive motors | 3440 cm/rev |
| Active pumps | 1355 cm/rev |
| Passive pumps | 1210 cm/rev |
| Gearbox ratio | 35.4 |
| Pinion ring-gear ratio | 14.17 |
| Drum diameter (without wire) | 2.8 m |
| Drum width | 1.9 m |
| Wire diameter | 96 mm |
| 5.1 m | 4.1 kg/m | 17,500 bar | |||||
| 80 l | 501.6 | 0.9 | |||||
| 1075 cm/rev | 645 cm/rev | 31 rad/s | |||||
| 0.16 m | 0.6 | 1 | |||||
| 0.68 s/m | 5 rad/s | ||||||
| 1800 rev/min | 1 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Moslått, G.-A.; Rygaard Hansen, M.; Padovani, D. Performance Improvement of a Hydraulic Active/Passive Heave Compensation Winch Using Semi Secondary Motor Control: Experimental and Numerical Verification. Energies 2020, 13, 2671. https://doi.org/10.3390/en13102671
Moslått G-A, Rygaard Hansen M, Padovani D. Performance Improvement of a Hydraulic Active/Passive Heave Compensation Winch Using Semi Secondary Motor Control: Experimental and Numerical Verification. Energies. 2020; 13(10):2671. https://doi.org/10.3390/en13102671
Chicago/Turabian StyleMoslått, Geir-Arne, Michael Rygaard Hansen, and Damiano Padovani. 2020. "Performance Improvement of a Hydraulic Active/Passive Heave Compensation Winch Using Semi Secondary Motor Control: Experimental and Numerical Verification" Energies 13, no. 10: 2671. https://doi.org/10.3390/en13102671