Enhance of Energy Harvesting from Transverse Galloping by Actively Rotating the Galloping Body


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Theoretical Model
2.1. Rotation Proportional to the Motion-Induced Angle of Attack
2.2. Galloping Response
2.3. Energy Harvesting Efficiency
3. Numerical Simulations and Validation of the Mathematical Model
3.1. Computational Domain and Boundary Conditions
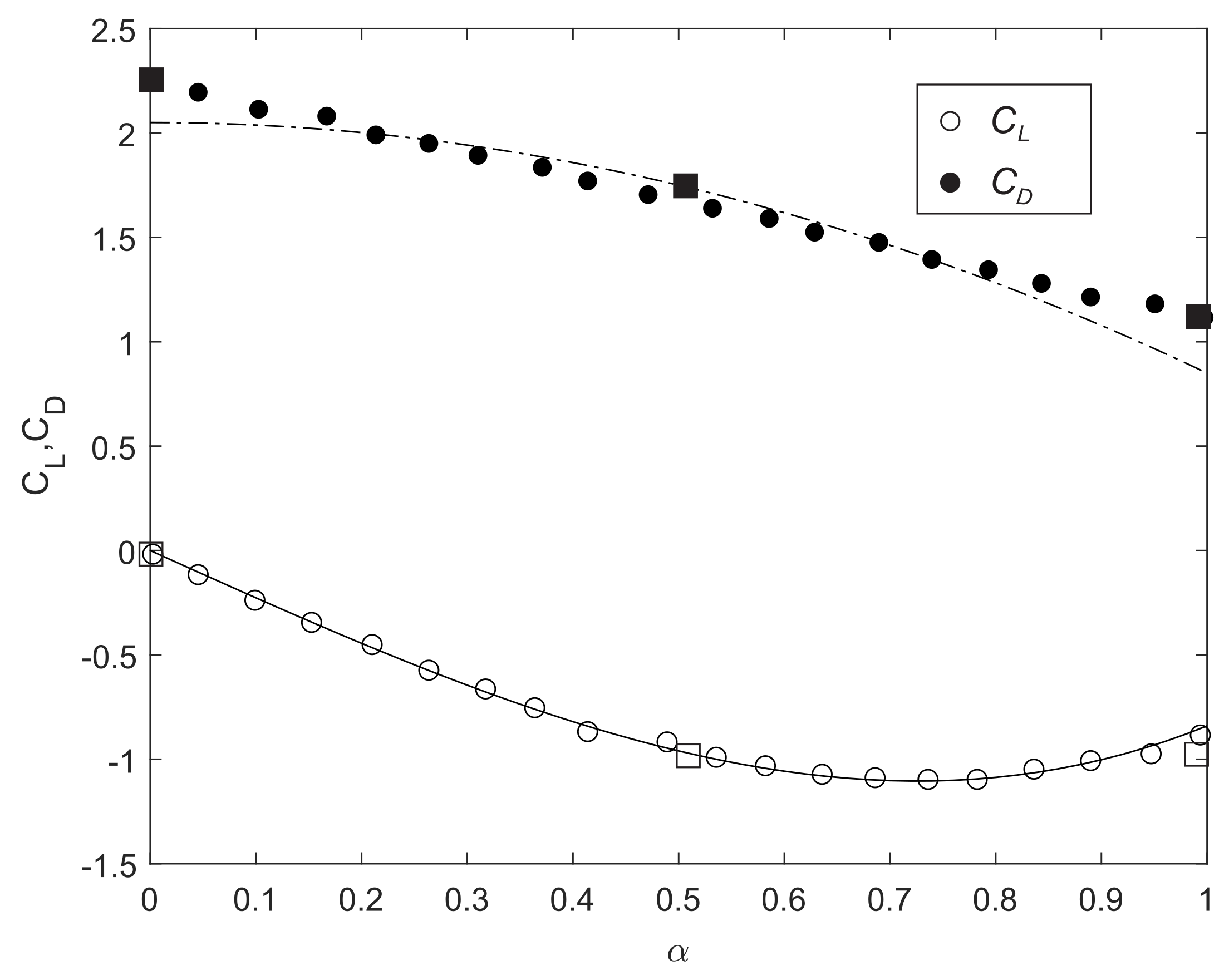
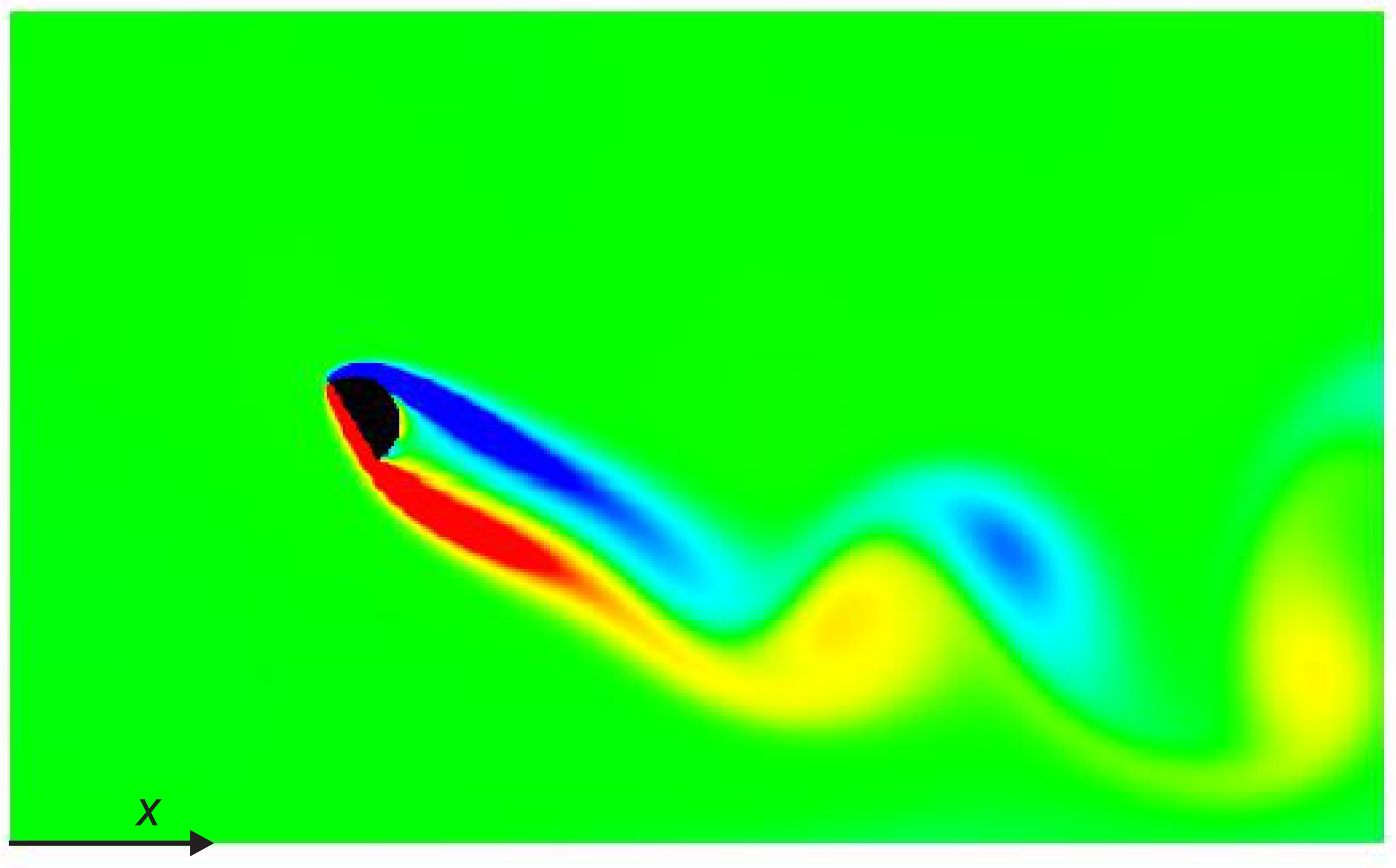
3.2. Results
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A. Numerical Simulation Method
- Collison: ,
- Streaming: .
Appendix A.1. Boundary Conditions
Appendix A.2. Force Evaluation

Appendix B. The Modeling of the Harvester as a Viscous Damper

Appendix C. The Mathematical Development to Arrive to Equations (16)
References
- Bernitsas, M.M.; Raghavan, K.; Ben-Simon, Y.; Garcia, E.M.H. VIVACE (Vortex Induced Vibration Aquatic Clean Energy): A New Concept in Generation of Clean and Renewable Energy from Fluid. J. Offshore Mech. Arct. Eng. ASME Trans. 2006, 130, 041101. [Google Scholar] [CrossRef]
- Bernitsas, M.M.; Ben-Simon, Y.; Raghavan, K.; Garcia, E.M.H. The VIVACE Converter: Model Tests at Reynolds Numbers Around 105. J. Offshore Mech. Arct. Eng. ASME Trans. 2006, 131, 1–13. [Google Scholar]
- Barrero-Gil, A.; Sanz-Andres, A.; Alonso, G. Energy Harvesting from Transverse Galloping. J. Sound Vib. 2006, 329, 2873–2883. [Google Scholar] [CrossRef] [Green Version]
- Barrero-Gil, A.; Lopez, A.G.V.; Perez, J.R.A.; Acedo, Ó.P.; Ludlam, D.V.; Xu, J.X. Energy Converters and Energy Conversion Systems. U.S. Patent 9,541,058, 10 January 2017. [Google Scholar]
- Sirohi, J.; Mahadik, R. Harvesting Wind Energy Using a Galloping Piezoelectric Beam. J. Vib. Acoust. 2010, 134, 011009. [Google Scholar] [CrossRef]
- Sirohi, J.; Mahadik, R. Piezoelectric wind energy harvester for low-power sensors. J. Intell. Mater. Syst. Struct. 2011, 22, 2215–2228. [Google Scholar] [CrossRef]
- Zhao, L.; Tang, L.; Yang, Y. Comparison of modeling methods and parametric study for a piezoelectric wind energy harvester. Smart Mater. Struct. 2013, 22, 125003. [Google Scholar] [CrossRef]
- Yang, Y.; Zhao, L.; Tang, L. Comparative study of tip cross-sections for efficient galloping energy harvesting. Appl. Phys. Lett. 2013, 102, 064105. [Google Scholar] [CrossRef]
- Xu-Xu, J.; Vicente-Ludlam, D.; Barrero-Gil, A. Theoretical study of the energy harvesting of a cantilever with attached prism under aeroelastic galloping. Eur. J. Mech. 2016, 60, 189–195. [Google Scholar] [CrossRef]
- Blevins, R. Flow-Induced Vibrations, Van Nostrand Reinhold; Van Nostrand Reinhold Company: New York, NY, USA, 1990. [Google Scholar]
- Naudascher, E.; Rockwell, D. Flow-Induced Vibrations: An Engineering Guide; A.A. Balkema: Rotterdam, Avereest, The Netherlands, 1994. [Google Scholar]
- Païdoussis, M.P.; Price, S.J.; De Langre, E. Fluid-Structure Interactions: Cross-Flow-Induced Instabilities; Cambridge University Press: Cambridge, UK, 2011. [Google Scholar]
- Abdelkefi, A.; Yan, Z.; Hajj, M.R. Performance analysis of galloping-based piezoaeroelastic energy harvesters with different cross-section geometries. J. Intell. Mater. Syst. Struct. 2014, 25, 246–256. [Google Scholar] [CrossRef]
- Vicente-Ludlam, D.; Barrero-Gil, A.; Velazquez, A. Enhanced mechanical energy extraction from transverse galloping using a dual mass system. J. Sound Vib. 2015, 339, 290–303. [Google Scholar] [CrossRef] [Green Version]
- Vicente-Ludlam, D.; Barrero-Gil, A.; Velazquez, A. Optimal electromagnetic energy extraction from transverse galloping. J. Fluids Struct. 2014, 51, 281–291. [Google Scholar] [CrossRef] [Green Version]
- Abdelmoula, H.; Abdelkefi, A. Piezoaeroelastic investigation on the control and energy harvesting of galloping systems. In Proceedings of the 57th AIAA/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, San Diego, CA, USA, 4–8 January 2016. [Google Scholar]
- Rizzoni, G.; Hartley, T.T. Principles and Applications of Electrical Engineering; Mc-Graw Hill: New York, NY, USA, 2000. [Google Scholar]
- Vicente-Ludlam, D.; Barrero-Gil, A.; Velazquez, A. Flow-induced vibration of a rotating circular cylinder using position and velocity feedback. J. Fluids Struct. 2017, 72, 127–151. [Google Scholar] [CrossRef]
- Sorribes-Palmer, F.; Sanz-Andres, A. Optimization of energy extraction in transverse galloping. J. Fluids Struct. 2013, 43, 124–144. [Google Scholar] [CrossRef] [Green Version]
- Bhinder, A.; Sarkar, S.; Dalal, A. Flow over and forced convection heat transfer around a semi-circular cylinder at incidence. Int. J. Heat Mass Transf. 2012, 55, 5171–5184. [Google Scholar] [CrossRef]
- Higuera, F.J. Boltzmann approach to lattice gas simulations. EPL (Europhys. Lett.) 1989, 9, 663. [Google Scholar] [CrossRef]
- Mei, R.; Luo, L.S.; Shy, W. An accurate curved boundary treatment in the lattice Boltzmann method. J. Comput. Phys. 1999, 155, 307–330. [Google Scholar] [CrossRef]
- Zhou, Q.; He, X. On pressure and velocity boundary conditions for the lattice Boltzmann BGK model. Phys. Fluids 1997, 9, 1591–1598. [Google Scholar] [CrossRef] [Green Version]
- Yu, D.; Mei, R.; Luo, L.S.; Shy, W. Viscous flow computations with the method of lattice Boltzmann equation. Progress Aerosp. Sci. 2003, 39, 329–367. [Google Scholar] [CrossRef]
- Caiazzo, A.; Junk, M. Boundary forces in lattice Boltzmann: Analysis of momentum exchange algorithm. Comput. Math. Appl. 2008, 55, 1415–1423. [Google Scholar] [CrossRef]












© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Barrero-Gil, A.; Vicente-Ludlam, D.; Gutierrez, D.; Sastre, F. Enhance of Energy Harvesting from Transverse Galloping by Actively Rotating the Galloping Body. Energies 2020, 13, 91. https://doi.org/10.3390/en13010091
Barrero-Gil A, Vicente-Ludlam D, Gutierrez D, Sastre F. Enhance of Energy Harvesting from Transverse Galloping by Actively Rotating the Galloping Body. Energies. 2020; 13(1):91. https://doi.org/10.3390/en13010091
Chicago/Turabian StyleBarrero-Gil, Antonio, David Vicente-Ludlam, David Gutierrez, and Francisco Sastre. 2020. "Enhance of Energy Harvesting from Transverse Galloping by Actively Rotating the Galloping Body" Energies 13, no. 1: 91. https://doi.org/10.3390/en13010091