1. Introduction
A shaft position sensor is generally used to detect the rotor position for the implementation of vector control in permanent magnet synchronous machine (PMSM) drives. However, such a sensor increases the cost and decreases the reliability of the motor drive. The shaft position sensor can be eliminated by using the machine itself as the position sensor. This technique is commonly called sensorless control. Sensorless control strategies generally belong to two categories: (1) saliency-based strategies and (2) back-electromotive force (EMF)-based strategies. In saliency-based strategies, the position is estimated by demodulating the injection-induced current [
1,
2,
3,
4,
5]. In back-EMF-based strategies, the position is estimated by tracking the back-EMF of the motor [
6,
7,
8]. Because these two approaches have complementary speed range limitations, two different sensorless control algorithms are generally combined to achieve a full speed range operation [
9,
10,
11]. Many studies have reported satisfactory motor drive performance with sensorless control [
2,
3,
9,
11,
12].
For a sensorless controlled PMSM, a stable startup from zero speed can be achieved by using any practical saliency-based control algorithm. However, starting a spinning sensorless controlled PMSM (known as flying start) is difficult and risky due to the lack of position and speed feedback during the restarting period. Without these feedbacks, the back-EMF of the motor cannot be decoupled from the current controllers. Consequently, the regeneration current is induced as soon as the switches of inverter are turned on. The induced current causes both undesirable motor dynamics and the rapid rise of the DC-link voltage. Moreover, a large induced current may cause a drive overcurrent fault. Therefore, a restarting strategy that can effectively counteract the influences of the back-EMF is essential for the safety and reliability of sensorless PMSM drives.
Several restarting strategies have been reported for PMSMs in recent years. Most of these strategies involve applying zero-voltage vector pulses intermittently in order to identify the initial rotor position and speed, as well as to mitigate the regeneration current [
13,
14,
15,
16,
17,
18]. In Ref. [
16], additional zero voltage vector pulses were applied to reduce the speed estimation error resulting from the limited time interval between two zero voltage vector pulses. To eliminate the influence of motor parameters and speed variations on the estimation performance, an adjustment procedure for the time duration of zero voltage vector pulses was developed in [
17] according to the methods described in [
14,
15,
16]. Although the aforementioned methods can be feasibly implemented on sensorless PMSM drives, the methods are generally complicated, sensitive to speed variations, and increase the computational burden on the controller.
Because motor restarting is generally practiced at medium and high speeds, a restarting strategy for back-EMF-based sensorless PMSM drives is proposed in this paper. The proposed strategy utilizes the existing back-EMF and position estimator. According to the analytical results, the back-EMF estimator can estimate back-EMF accurately during the restarting period even without the position and speed feedback. The estimated back-EMF is then added to the current control loop as the decoupling voltage to suppress the regeneration current. Simultaneously, the rotor position and speed are also estimated by tracking the estimated back-EMF. Consequently, no additional algorithm or specific voltage vector pulses are required to identify the initial rotor position and speed. The proposed strategy is based on the scheme in [
19] but with extensive improvements made to the algorithm and the experimental verifications. A supplementary transient current suppression algorithm is developed to suppress the transient current within five sampling period. The experimental results for the motor restarting from various rotor positions and speeds are additionally conducted to verify the feasibility of the proposed restarting strategy.
2. Sensorless Control System
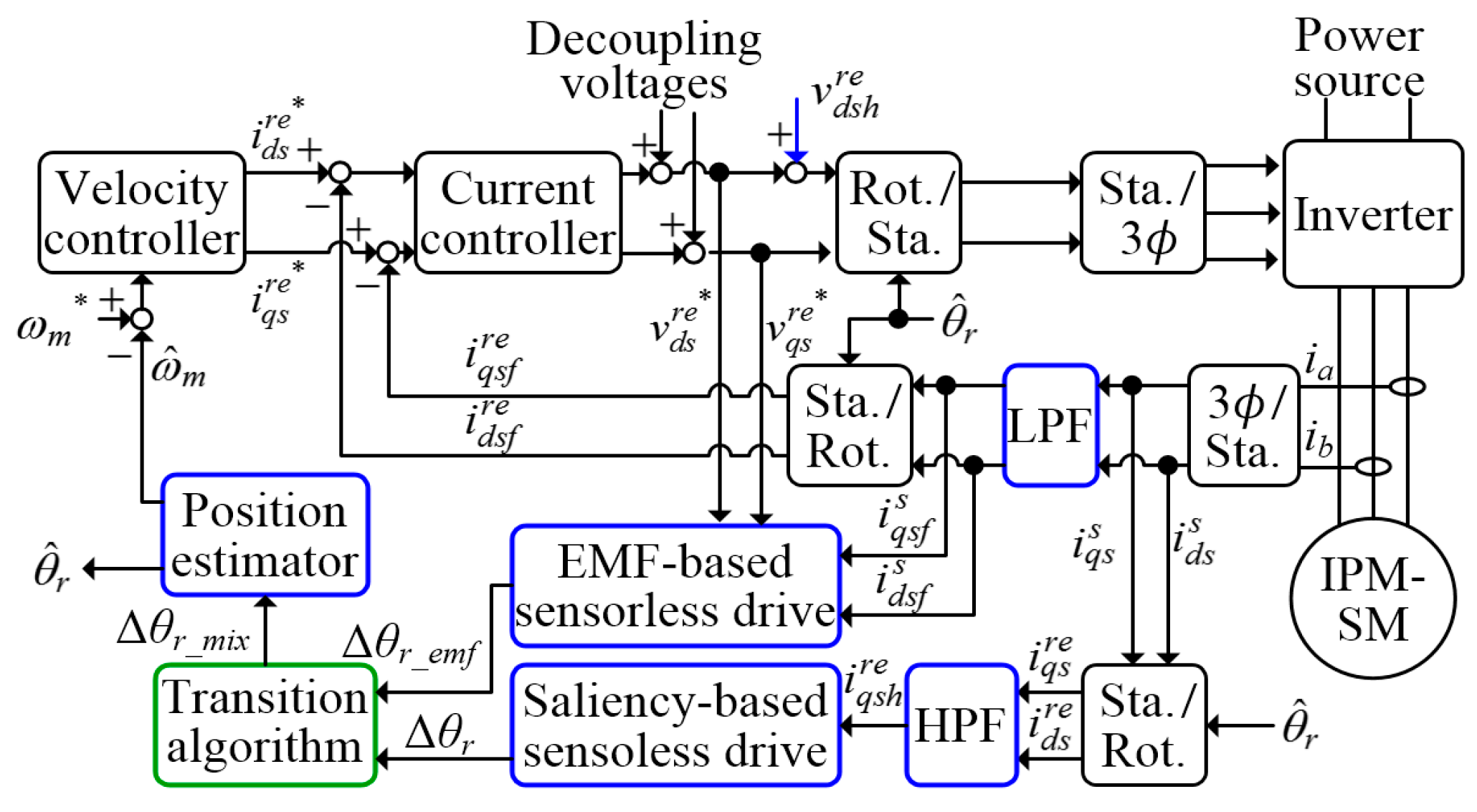
This paper presents a mixed saliency-based and back-EMF-based sensorless control algorithm for PMSM drives.
Figure 1 displays the block diagram of the control system. The saliency-based sensorless algorithm estimates the rotor position at zero speed and low speeds through high-frequency (HF) square-wave voltage injection, whereas the back-EMF-based sensorless algorithm estimates the rotor position at intermediate and high speeds. A transition procedure merges the results to estimate the rotor position when the motor is operating in the transition speed region. These aforementioned algorithms are briefly explained in this section.
The stator voltage for the PMSM in the rotor reference frame can be expressed as follows:
where
,
,
, and
are the
q- and
d-axis voltages and currents, respectively;
Lqs and
Lds are the
q- and
d-axis inductance, respectively;
rs,
ωr, and
λm are the phase resistance, rotor speed, and magnet flux, respectively; and
s is the differential operator.
2.1. Saliency-Based Sensorless Control
As displayed in
Figure 1, a square-wave voltage (
) is injected in the estimated
d-axis and the saliency spatial signal is extracted from the induced
q-axis current. The superscript
re indicates that the quantity is in the estimated rotor reference frame, and
vinj denotes the magnitude of the injection voltage. The induced difference currents are given as follows:
and
where the subscript
h denotes the HF quantities,
θr is the rotor position, Δ
T is the inverse of injection frequency, and
denotes the estimated rotor position. As indicated in (2), when the estimated rotor frame is not aligned with the actual one, a 2Δ
θr position-dependent current signal is generated in both the
d- and
q-axis currents. The ± sign compensation is necessary due to the square-wave voltage injection. Moreover, a high-pass filter is implemented to remove the fundamental component for calculating the difference current. When the position error is sufficiently small, the current signal in the
q-axis can be rewritten as
The rotor position can be estimated from the measured q-axis difference current by using a closed-loop estimator. Note that the injection voltage and frequency is 60 V and 9 kHz, respectively.
2.2. Back-EMF-Based Sensorless Control
The rotor position can be estimated by tracking the extended back-EMF voltage [
6]. Equation (1) can be rewritten as:
where
eqs =
Eb·cos(
θr) and
eds = −
Eb·sin(
θr) represent the extended back-EMF along the
q- and
d-axes, respectively;
; and
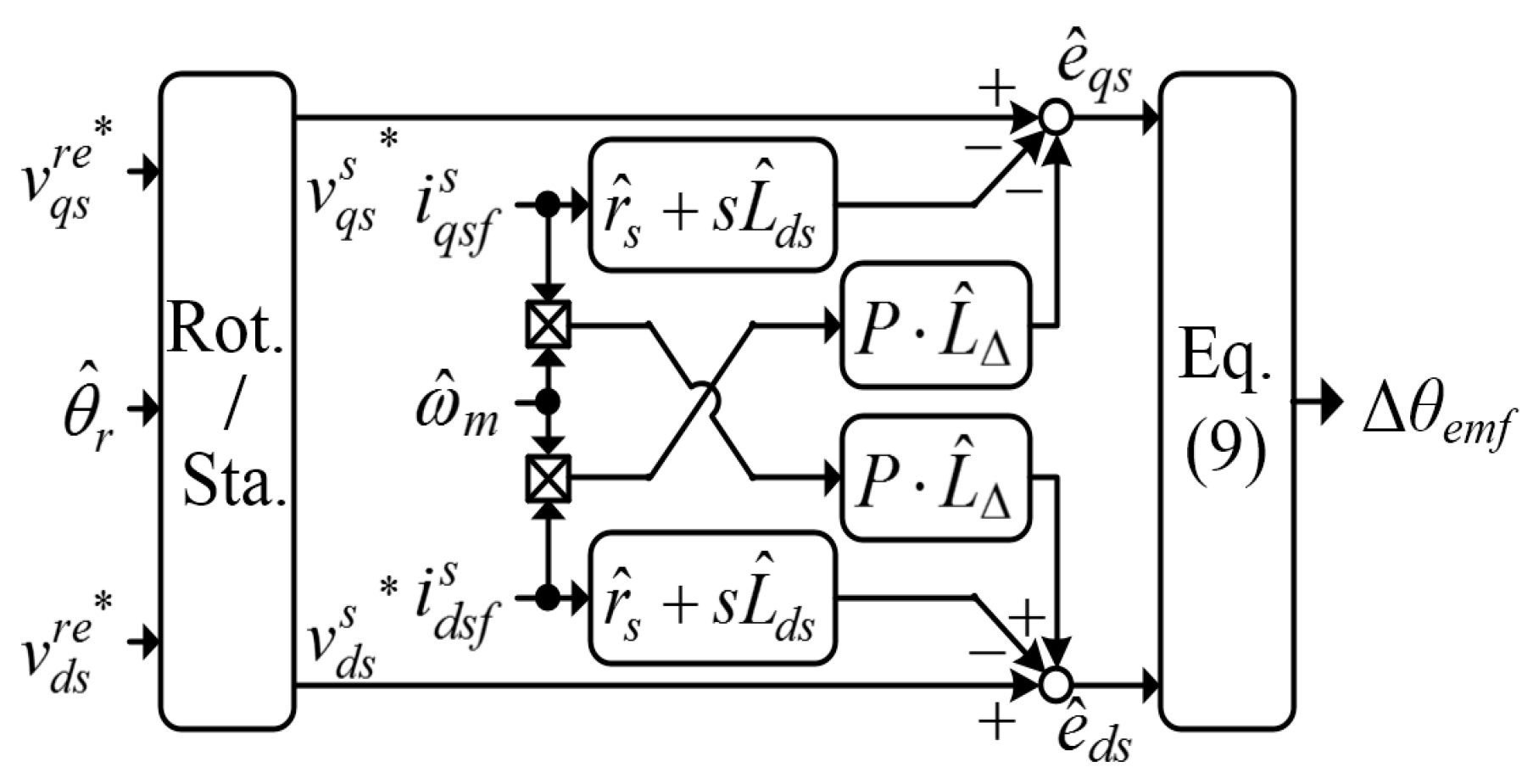
P represents the pole pairs of rotor poles. When the motor parameters are known, the extended back-EMF is calculated as follows:
where the subscript
f is the fundamental frequency components, “*” denotes the command value, “^” denotes the estimated value,
ωm is the mechanical speed., and
θr_emf is the rotor position estimated from the extended back-EMF. A low-pass filter with cutoff frequency of 3 kHz is used to remove the HF current components to avoid HF noise. A position error dependent signal (Δ
θemf) is then extracted from the following vector product:
The estimated back-EMF voltage is normalized with its magnitude.
Figure 2 presents the formulas for calculating
,
, and Δ
θemf. When the position error is sufficiently small, Δ
θemf can be approximated as follows:
Thus, the rotor position can be estimated by controlling Δθemf to zero with a closed-loop estimator.
2.3. Transition Period Control
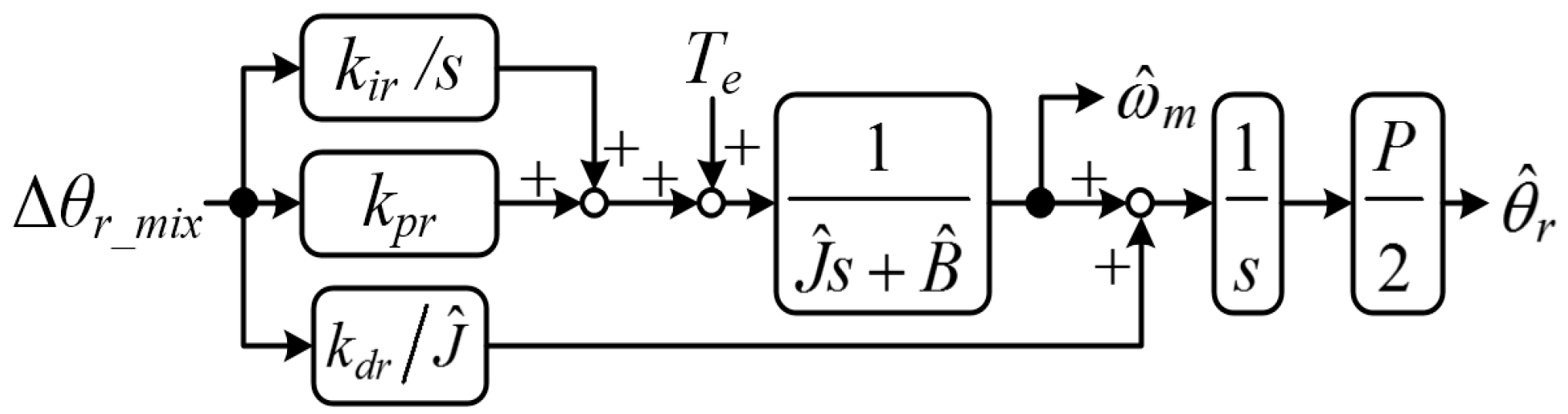
In the transition speed region, a speed-dependent weighting function combines the position errors generated in (6) and (10) as follows:
where
Gω is a linear weighting function with a maximum value of 1 and minimum value of 0. The position estimator illustrated in
Figure 3 is used to estimate the rotor position and speed by converging Δ
θr_mix to zero.
J denotes the combined rotor and load inertia,
B denotes the frictional torque coefficient, and
Te is the motor torque command. The estimator gains
kir,
kpr, and
kdr are tuned using the pole-placement method to track the actual rotor position and speed with the desired dynamic response.
3. Restarting A Spinning PMSM without Position and Speed Feedback
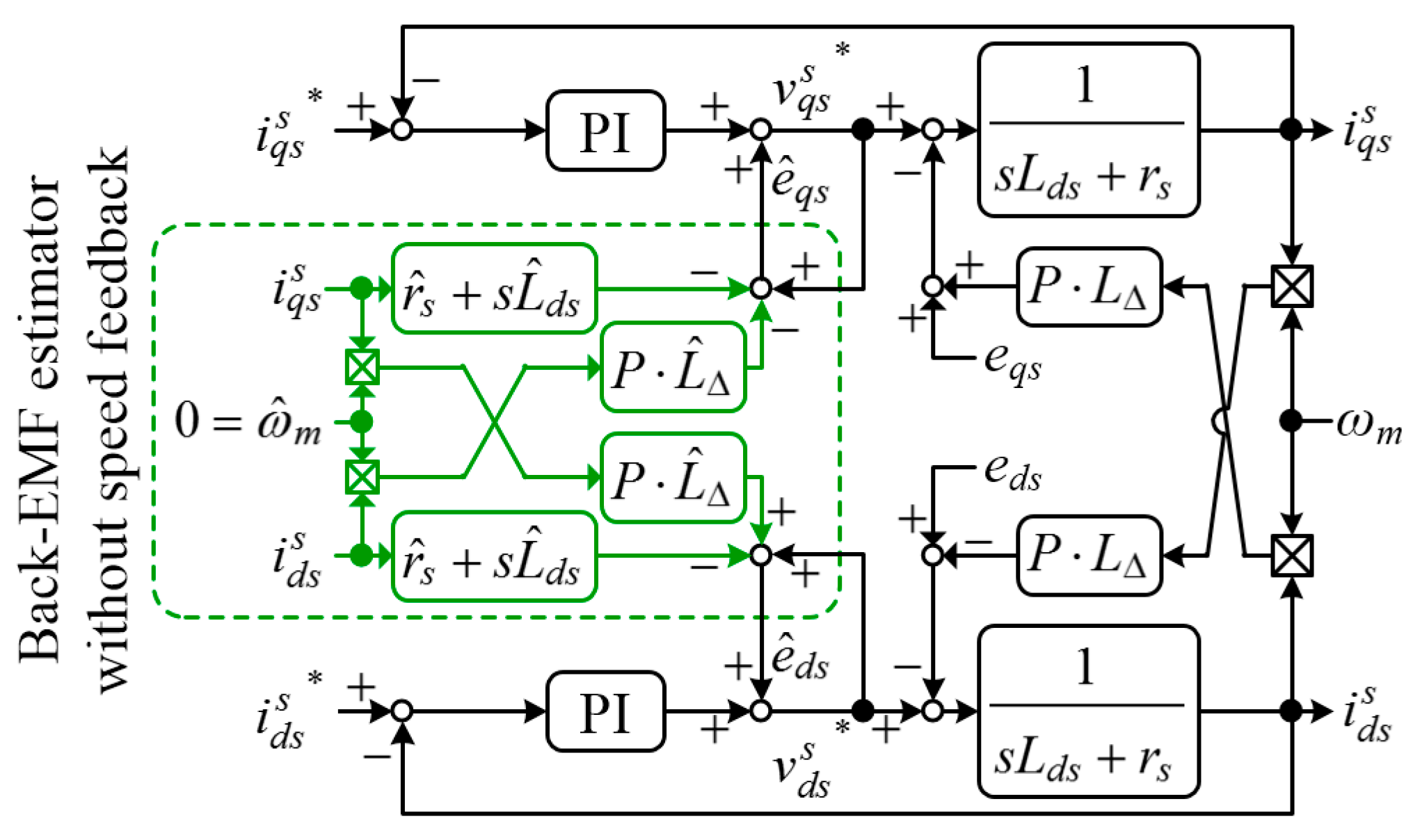
As displayed in
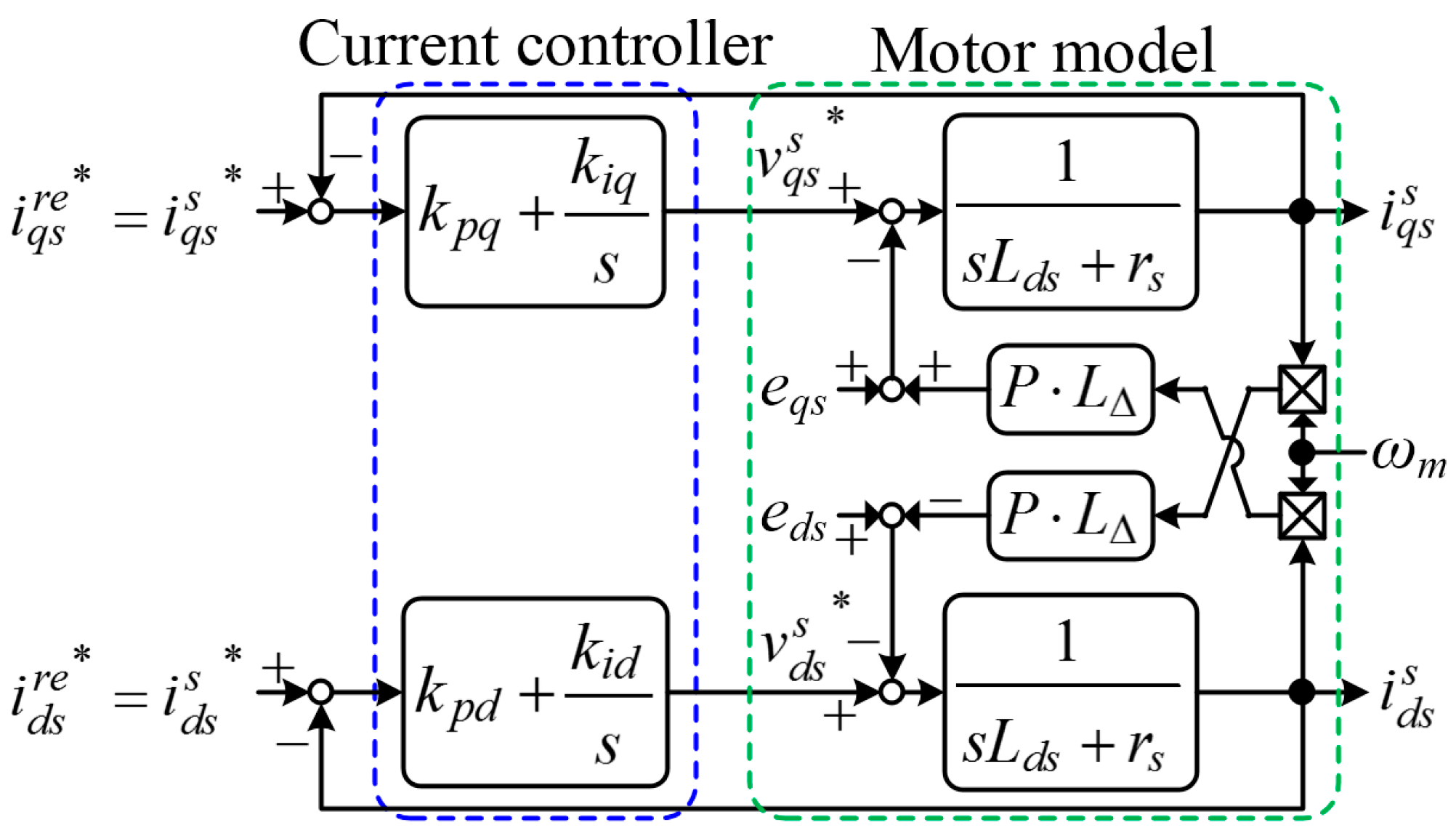
Figure 1, the current controllers require the motor position and speed feedback for vector control and calculating the decoupling voltages. However, when starting a spinning PMSM without position or speed feedback, the current controllers become a stationary frame controller accordingly. Therefore, the current controllers are regulating the AC quantities and their performance is degraded due to the absence of the decoupling voltages and position feedback, as displayed in
Figure 4. The voltage commands become stationary frame quantities, and the back-EMF becomes a disturbance to the current controllers. Because the cross-coupling voltages (i.e.,
and
) are generally much smaller than the back-EMF, these voltages are neglected in the following analysis. The current commands are set to zero to obtain zero torque expectantly during restarting period. From
Figure 4, the transfer functions between the current and back-EMF can be approximated as
where
kpq,
kiq and
kpd,
kid are the proportional and integral gain for the
q- and
d-axis current controller, respectively.
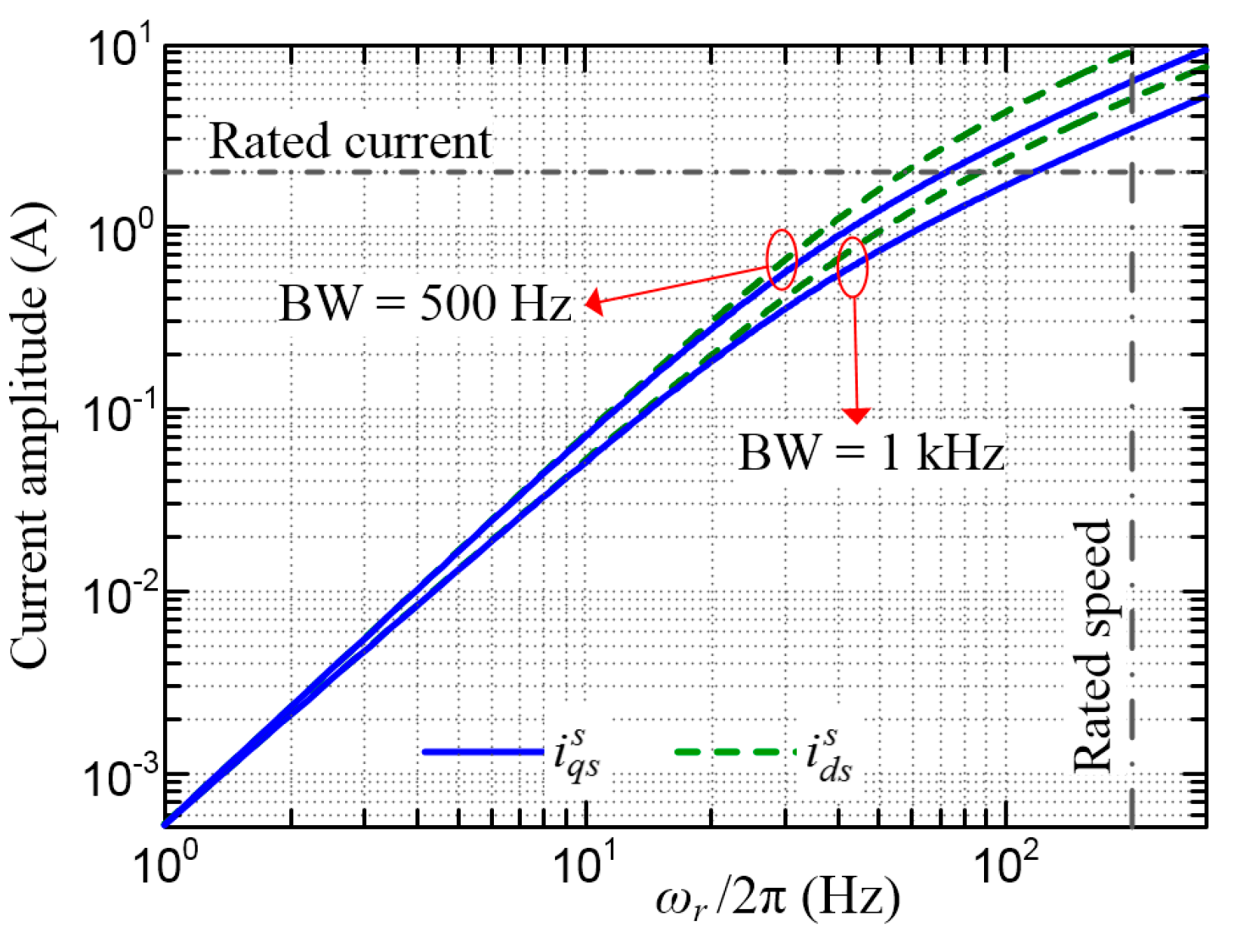
Figure 5 shows the stator current responses at a set current controller bandwidth (BW) of 500 Hz and 1 kHz. The PMSM parameters used for the calculations are presented in
Appendix A. The amplitude of the induced current is highly dependent on the rotor speed and current controller BW. A higher rotor speed and lower controller BW yield a larger current. Moreover, the amplitude of the induced current at the rated speed is approximately 2.5 times the rated current at the current controller BW of 1 kHz. Consequently, the induced current may cause overcurrent fault and bring the motor back to the coasting state.
Solving (12) and (13) through the inverse Laplace transform can yield the steady-state induced currents as follows:
where
Zeq and
Zed are the equivalent impedances and
φq and
φd are the equivalent phases. The equivalent impedances and phases are given as follows:
The braking torque (
Teb) produced by the induced current can be calculated by substituting (14) and (15) into the following expression:
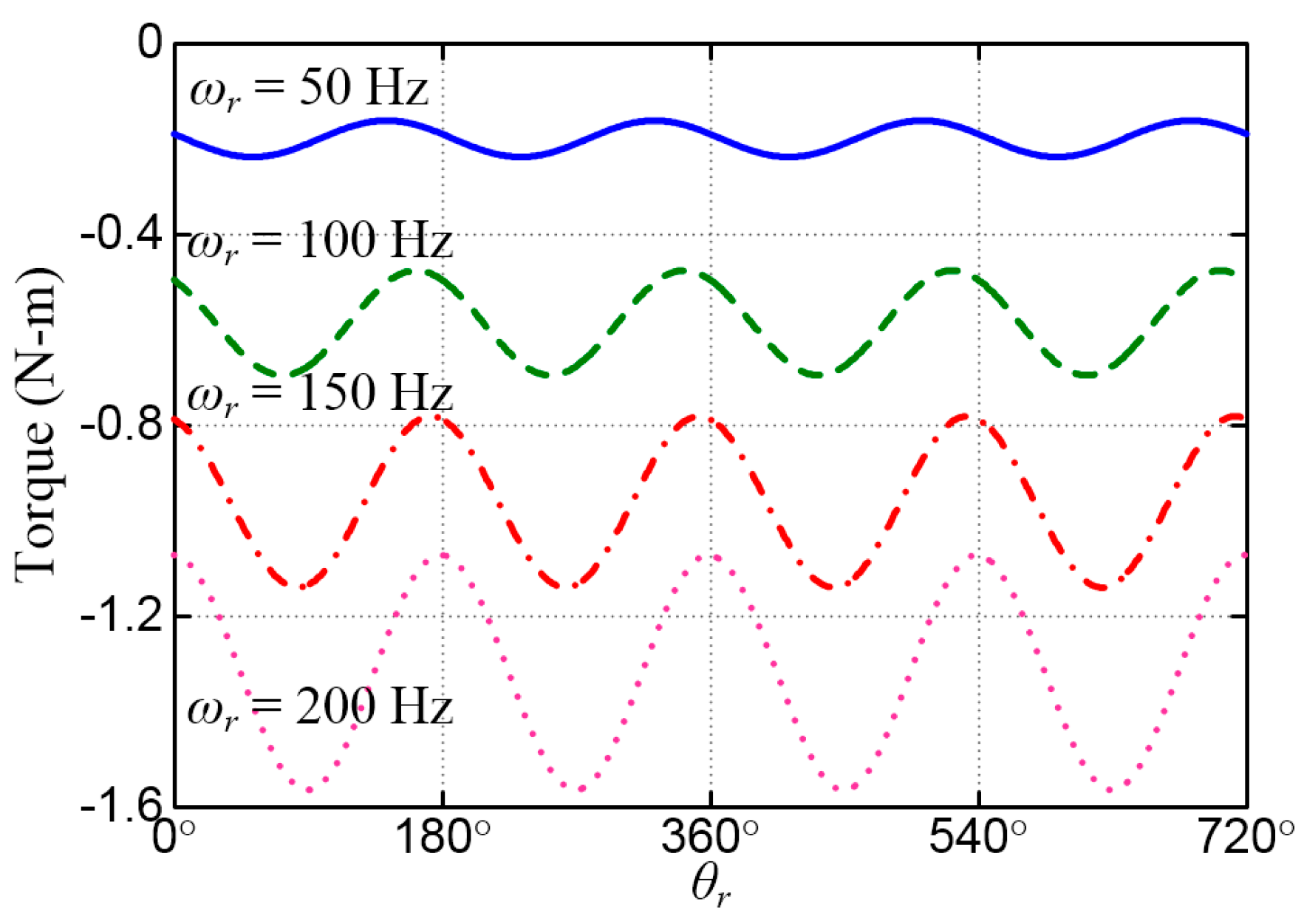
Figure 6 illustrates the values of
Teb for various speeds. Both average and pulsating braking torques exist when the motor is restarted at high speeds. A large average braking torque can cause the motor to brake unexpectedly. This torque also represents the regenerative power generated by the motor. A large regenerative power may cause a rapid rise in the DC-link voltage and potential damage to the front-end power supply.
5. Experimental Results
A 400 W, a four-pole PMSM was used for experimental verifications. The parameters of the PMSM are provided in
Appendix A.
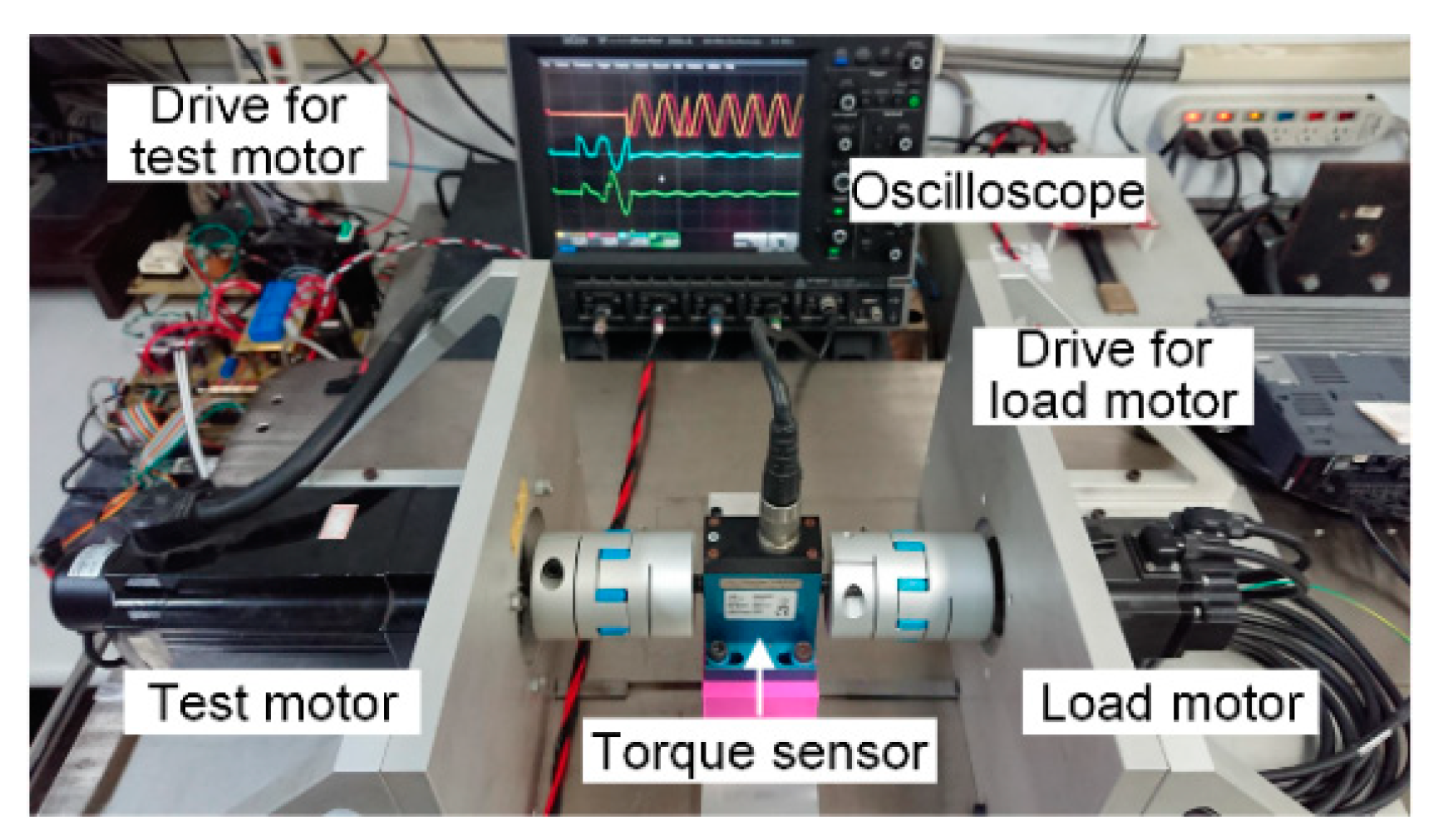
Figure 10 shows the experimental system. The sensorless control and restarting control algorithms were implemented using a Texas Instruments TMS320F28335 digital signal processor. The sampling frequencies for current and velocity control were 18 kHz (
Ts = 56 µs) and 2.2 kHz, respectively. The bandwidths of the current and velocity controller were tuned to 1000 and 25 Hz, respectively. The DC-link voltage was 300 V. The transition speed for the saliency-based and back-EMF-based sensorless control algorithm was 600–900 rpm. A load motor provided external load to the test motor. The actual rotor position and speed were monitored by an encoder with a resolution of 2500 pulse/rev.
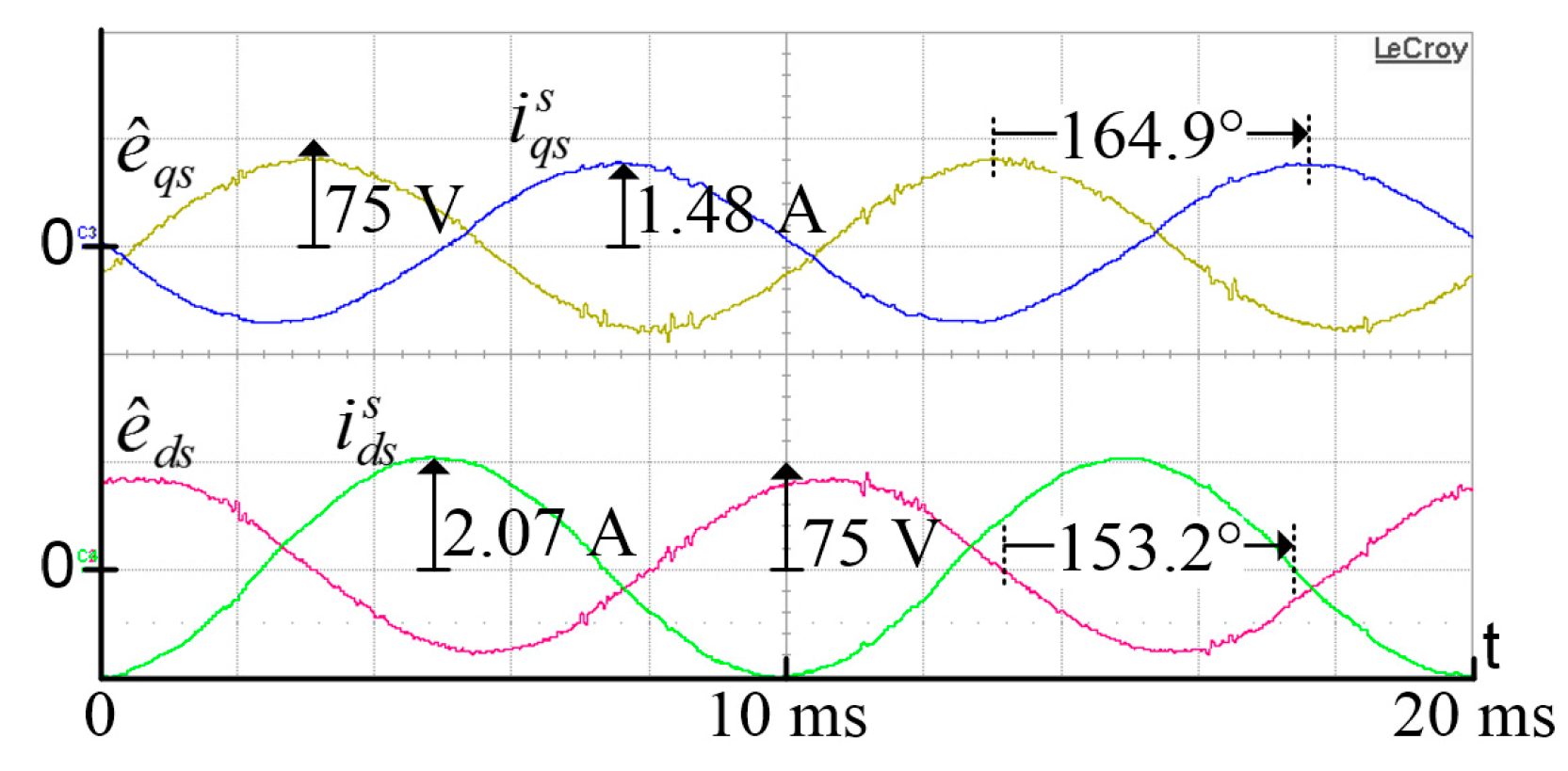
Figure 11 depicts the measured steady-state currents and estimated back-EMF when the current controllers were activated without speed or position feedback. No decoupling voltage was applied. Both the current commands were set to zero, and the motor speed was regulated at 3000 rpm by the load motor. Significant induced currents existed due to the undecoupled back-EMF. The motor currents at various speeds were measured and compared with the calculated values obtained using (14) and (15). The calculated and measured results are summarized in
Table 1. As indicated in
Table 1, the measurements highly agreed with the calculated values. The results list in
Table 1 also demonstrate the validity of the assumption in (12)–(13) that the cross-coupling voltages are small enough to be ignored.
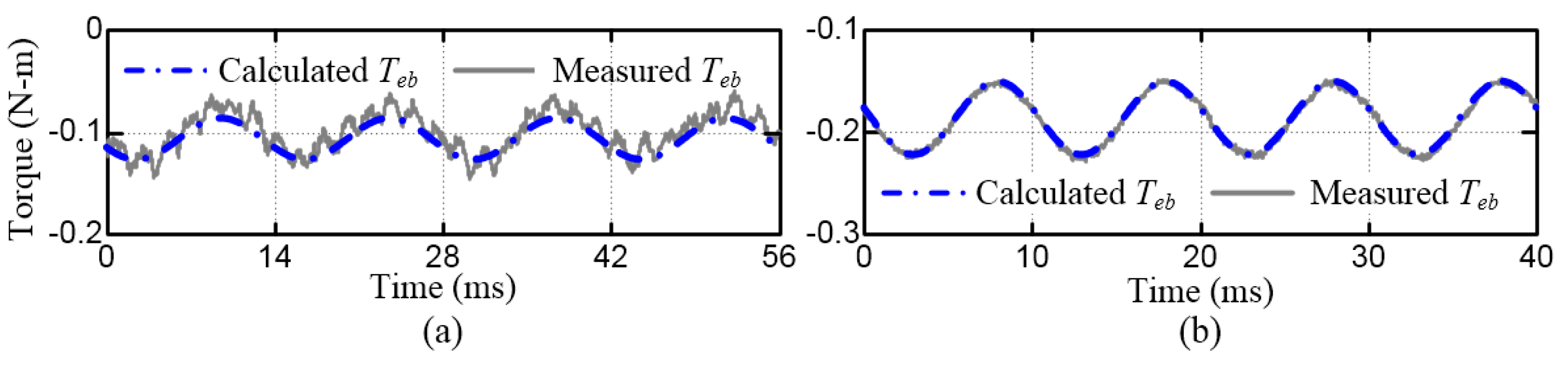
Figure 12a,b illustrates a comparison of the measured and calculated braking torques at 1080 and 1500 rpm, respectively. The braking torque was measured using a torque sensor. The frequency of the torque ripple was twice the rotor speed. Moreover, when HF components were ignored, the measured torque was highly consistent with the values calculated using (18).
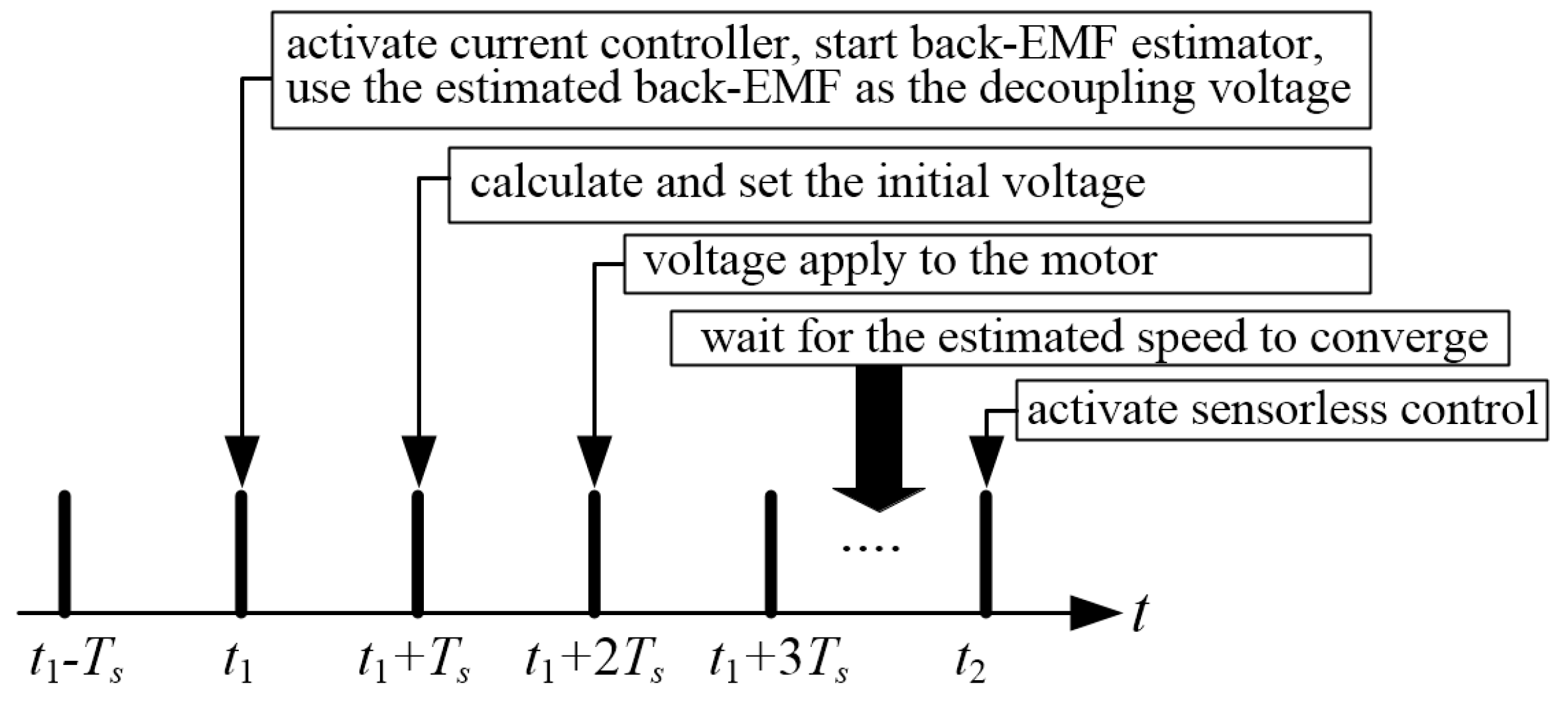
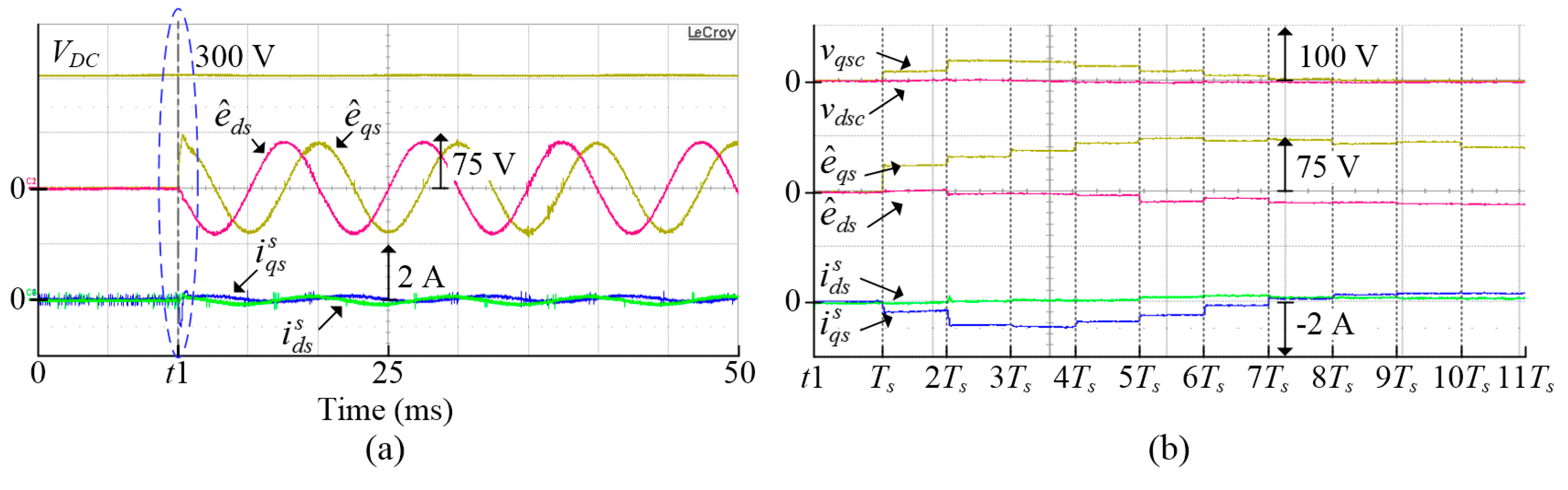
Figure 13 presents the current responses when the back-EMF was decoupled and the initial controller voltage was set to zero. The motor speed was regulated at 3000 rpm by the load motor, and the current commands were set to zero. The drive was activated with the proposed restarting strategy at
t1. The back EMF was estimated at
t1 +
Ts and applied to the motor at
t1 + 2
Ts. However, motor currents require approximately eight sampling periods to settle down after the drive is activated.
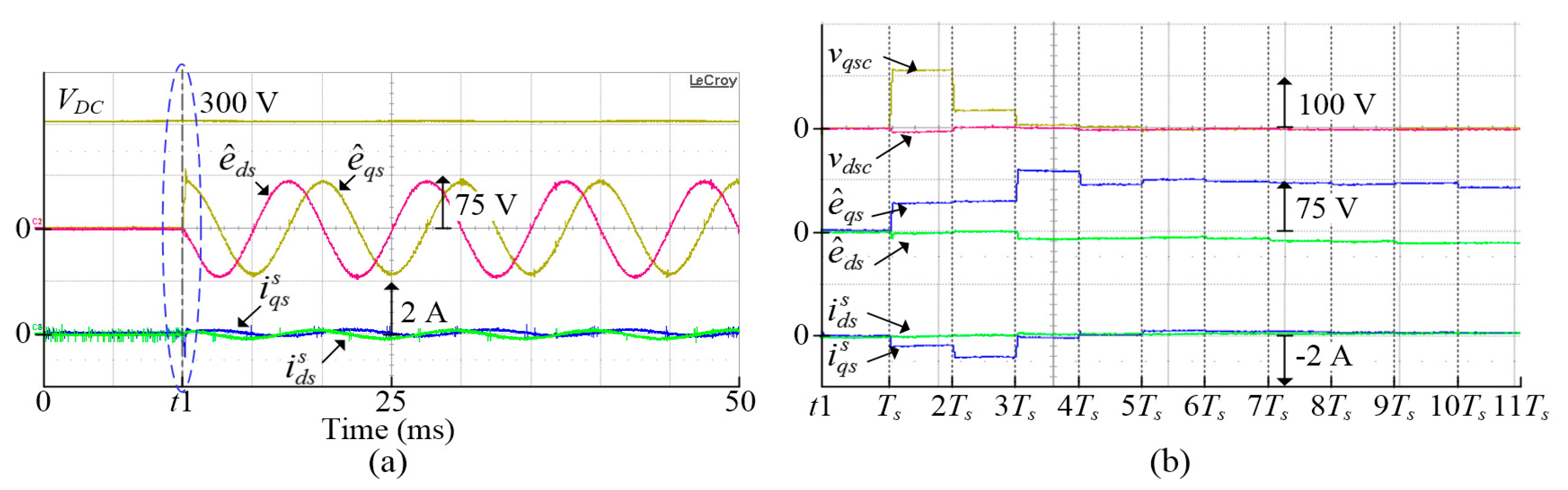
Figure 14 displays the results when the initial controller voltages were calculated using (32) and (33) under experimental conditions similar to those in
Figure 13. The motor currents settled down within only four sampling periods. This indicates that the motor currents increase linearly in such short time, and the assumption used for the initial controller voltages calculation in
Section 4.3 is reasonable.
Table 2 provides a summary of the maximum amplitude and settling time of the measured currents when the motor started from various rotor positions at 3000 rpm. All the maximum currents were less than half the rated current, and the settling times were 4–5 times
Ts. These results indicate that the back-EMF-induced current can be effectively suppressed with the proposed restarting strategy.
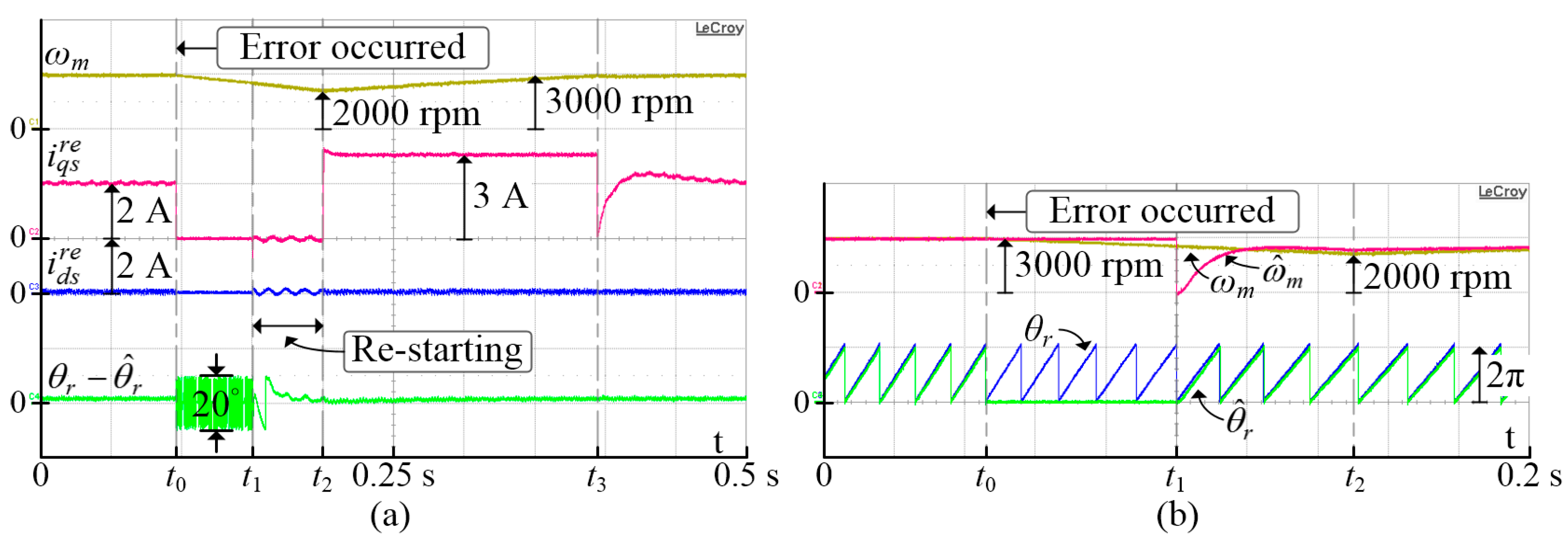
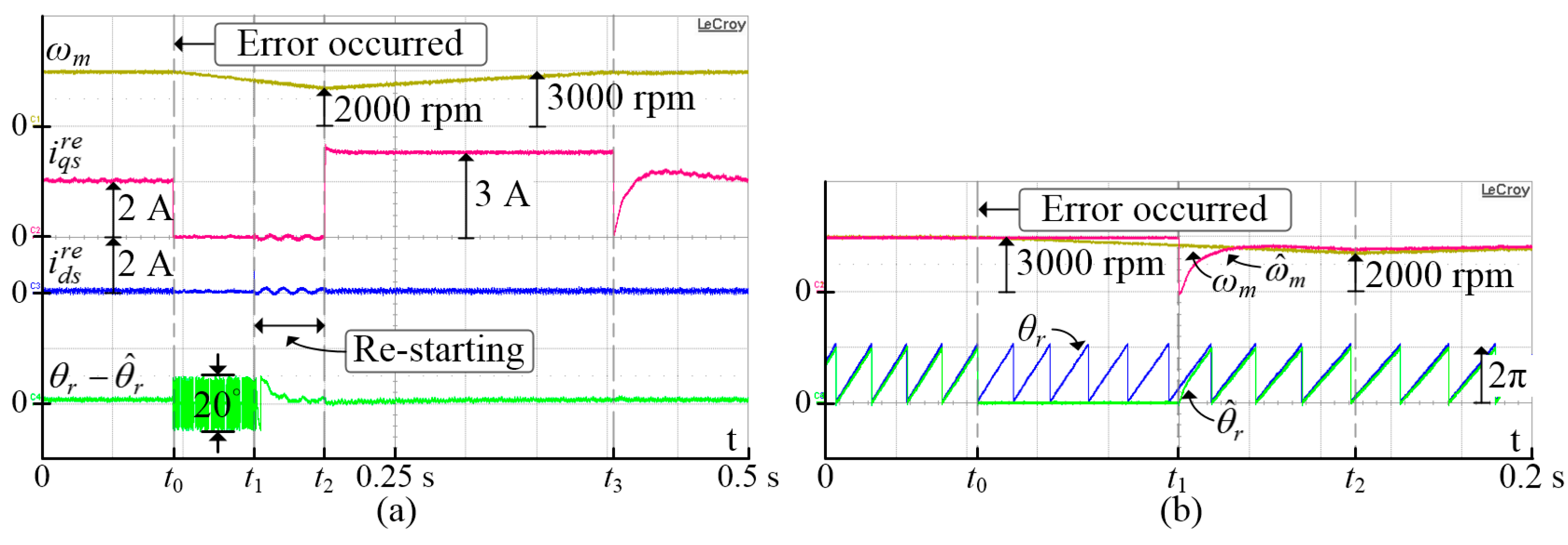
Figure 15 and
Figure 16 show the results obtained when the motor was running at 3000 rpm with the rated load and then restarted from an unexpected error occurrence at
θr = 0° and 90°, respectively.
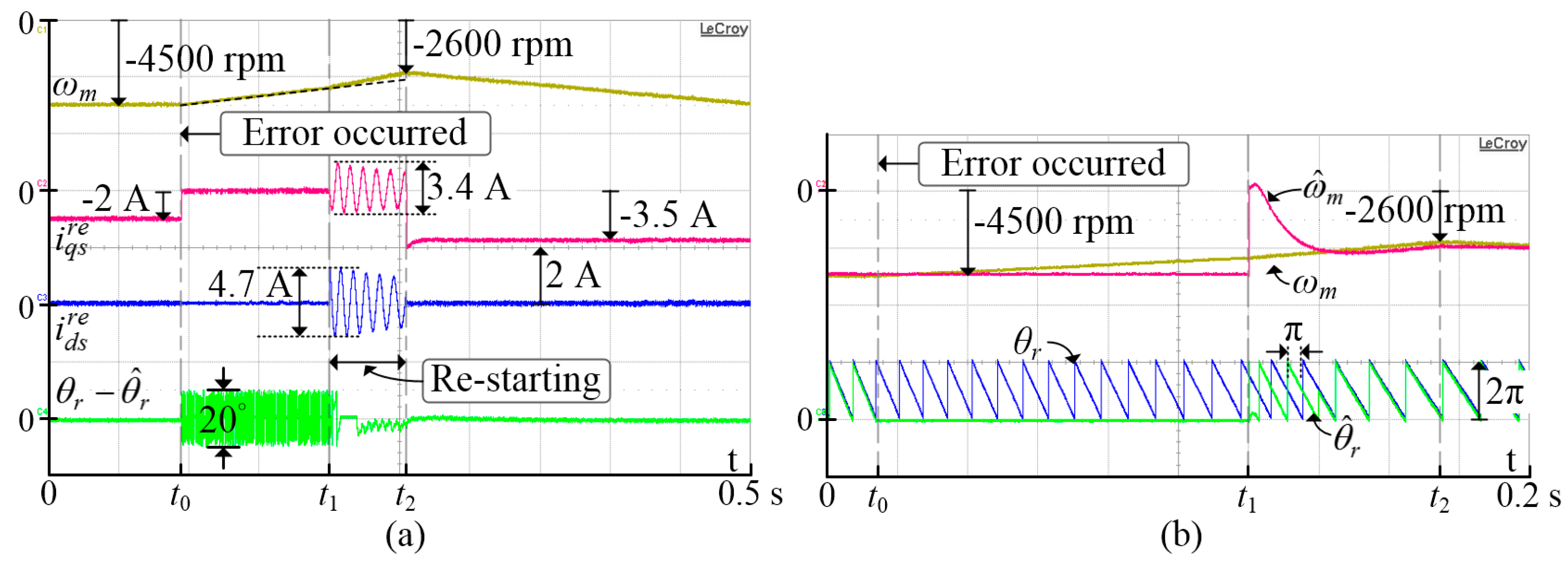
Figure 17 and
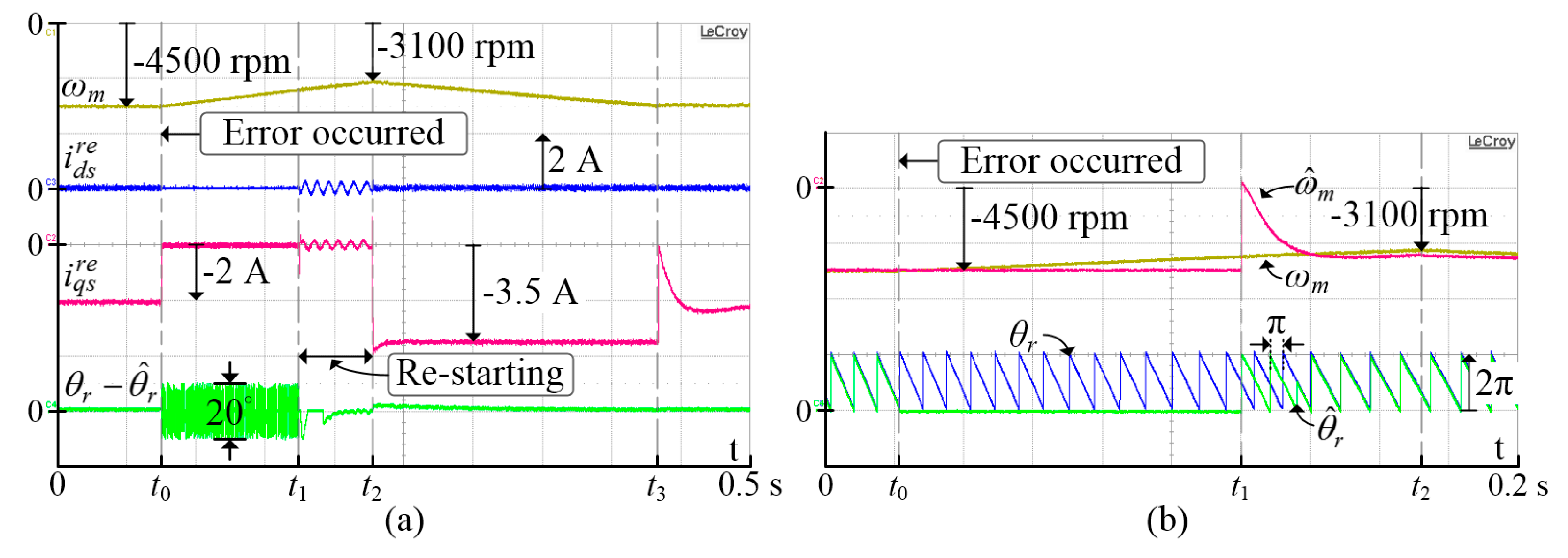
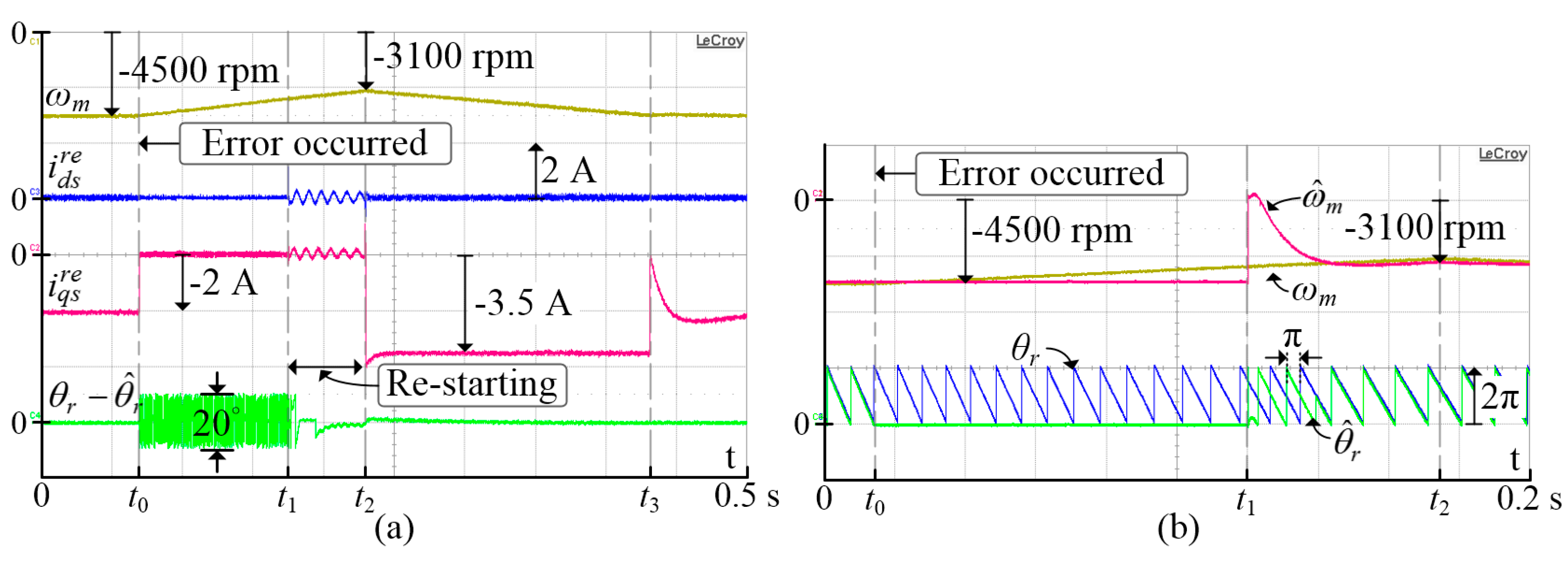
Figure 18 illustrate the results obtained when the motor was running at −4500 rpm with the rated load and then restarted from an unexpected error at
θr = 180° and 270°, respectively. The motor was initially controlled through sensorless control and subjected to the rated load. The motor drive was turned off at
t0 to emulate the occurrence of an error, such as sensor failure or temporary power disruption. Subsequently, the motor coasted down rapidly between
t0 and
t1 due to the large external load torque. The drive was then activated using the proposed restarting strategy at
t1. After the estimated speed and position reached the steady state at
t2, sensorless control was performed again with constant current commands to increase the motor speed. Finally, the system switched back to the regular sensorless speed control after the motor speed reached the preset command (3000 and −4500 rpm).
According to the above results, all the transient currents at
t1 were very small, which indicates that the back-EMF-induced currents had been effectively suppressed irrespective of the starting speed or position. The amplified waveforms also indicate that the rotor position and speed could be estimated correctly irrespective of the rotation direction. Although the estimated position reached the actual position rapidly, the estimated speed required approximately 0.02 s to reach the actual speed. Therefore, the duration between
t1 and
t2 should be higher than 0.02 s for a smooth restart of the sensorless control. Most importantly, although the position estimator takes longer time to estimate the actual speed correctly, the induced current is still suppressed effectively because the back-EMF can be estimated accurately without the speed feedback. Actually, this is one of the key features of the proposed restarting strategy. Note also that for a negative speed, a 180° phase error appeared in the estimated position due to the normalization of Δ
θemf. The correct rotor position was obtained after the rotation direction was identified and the phase error was compensated. Additionally, as shown in
Figure 15,
Figure 16,
Figure 17 and
Figure 18, the position error (
) after
t2 approximates to 0° because the motor parameters are measured with reasonable accuracy and the nonlinearity of the inverter is well compensated.
Figure 19 displays the results of an experiment conducted under similar conditions to those for the experiment displayed in
Figure 18 but with direct restarting of the motor. The back-EMF is not decoupled and the initial voltage is not applied when the motor is directly restarted. Although the motor speed and position could be still estimated with high accuracy, significant back-EMF-induced currents appeared between
t1 and
t2 because the back-EMF was not decoupled. Moreover, the motor coasted down faster in the experiment displayed in
Figure 19 than in the experiment displayed in
Figure 18 due to the large braking torque.
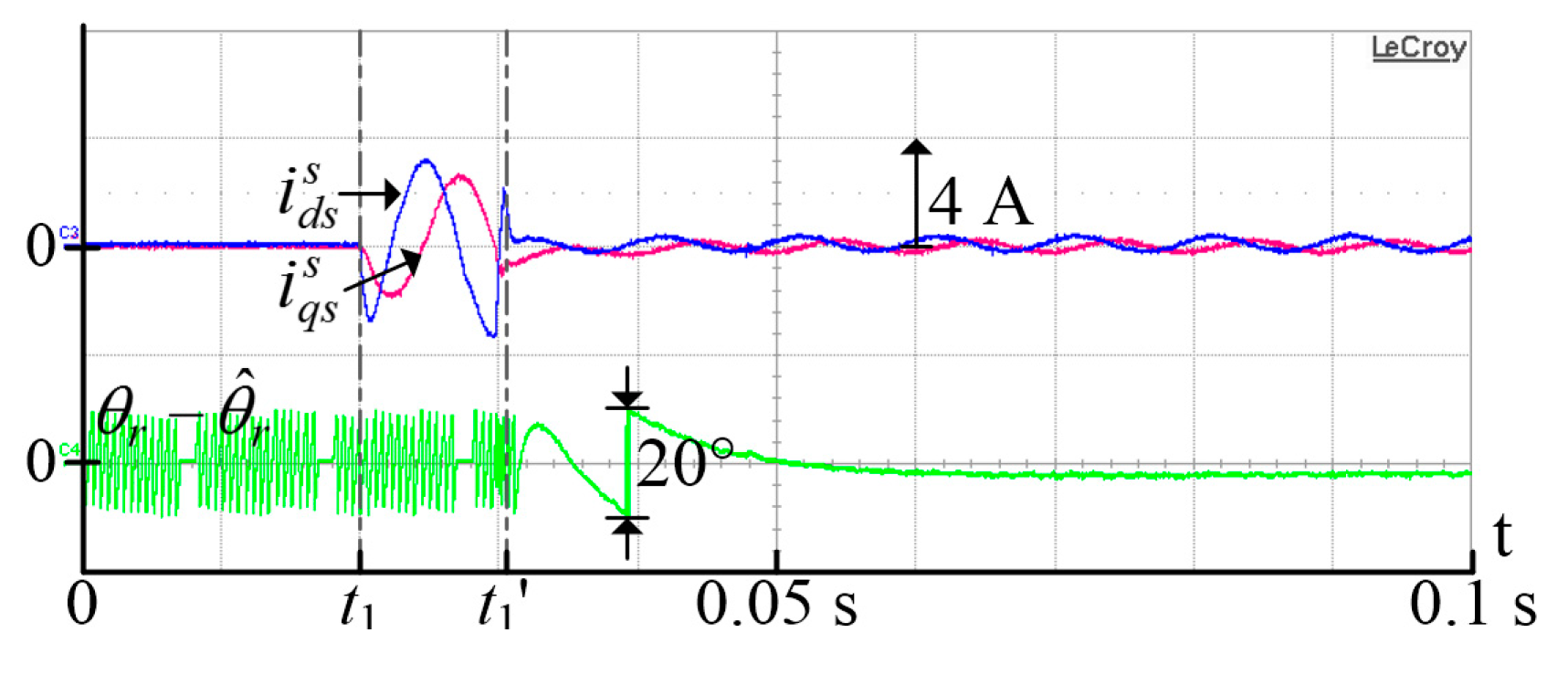
Figure 20 presents the currents and position errors when the motor speed was regulated by the load motor at 3000 rpm, current commands were set to zero, and BW of the current controller was set to 500 Hz. The current controller was activated at
t1, and the restarting strategy was implemented at
t1’ to examine its effectiveness. It can be seen that the position error is obviously larger than that in
Figure 15,
Figure 16,
Figure 17 and
Figure 18 because low BW of the current controllers causes significant phase delay on the estimated back-EMF, as mentioned in
Section 4.1. In addition, a large transient current was induced between
t1 and
t1’. However, the induced current was suppressed as soon as the restarting procedure was implemented. This result also confirms that the proposed restarting strategy is effective even with a considerably low current controller bandwidth.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}



















