A Flower Pollination Method Based Global Maximum Power Point Tracking Strategy for Point-Absorbing Type Wave Energy Converters


Abstract
:1. Introduction
2. Analysis Model of the Point-Absorbing Type WEC and Power Spectrum
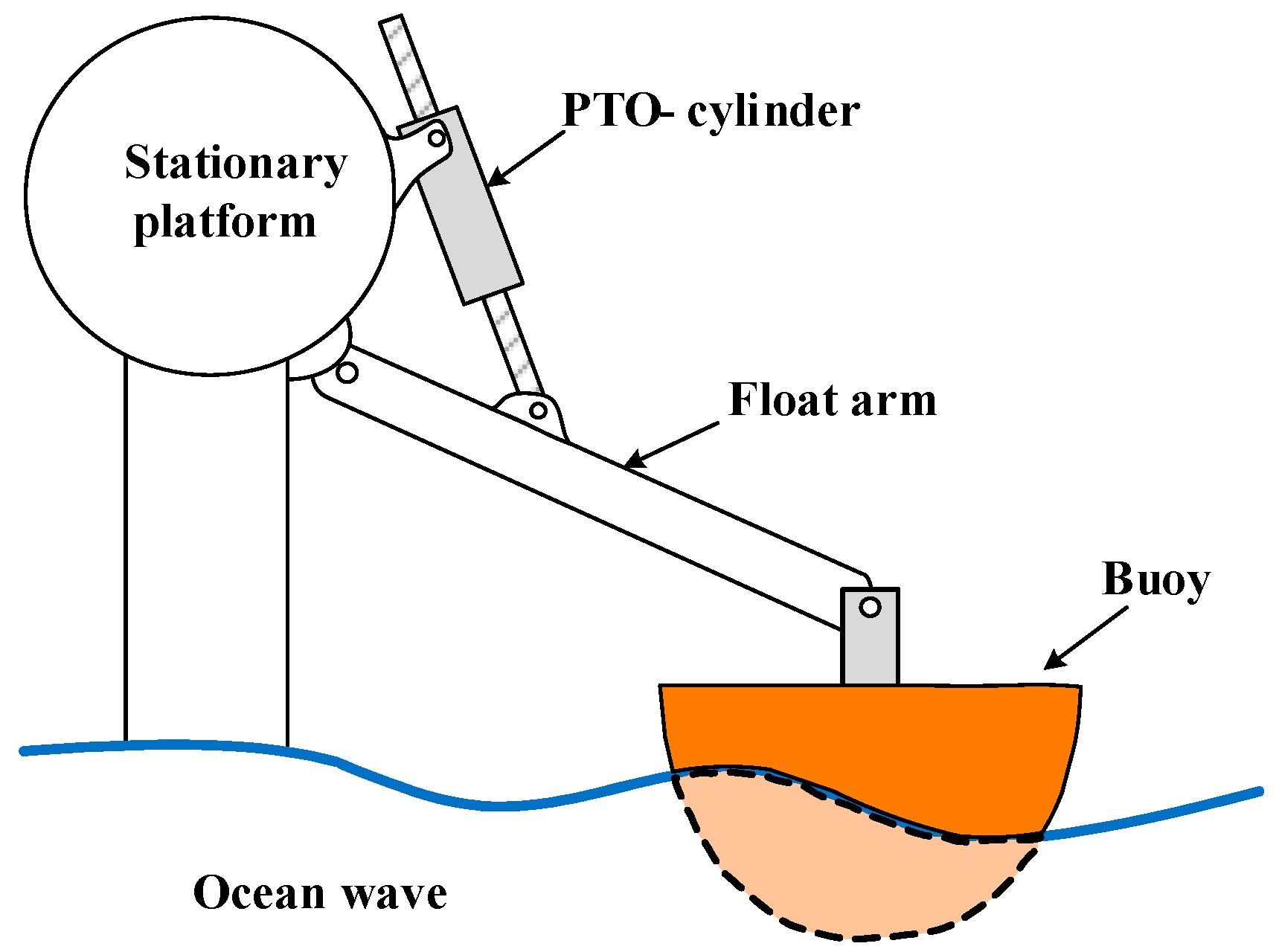
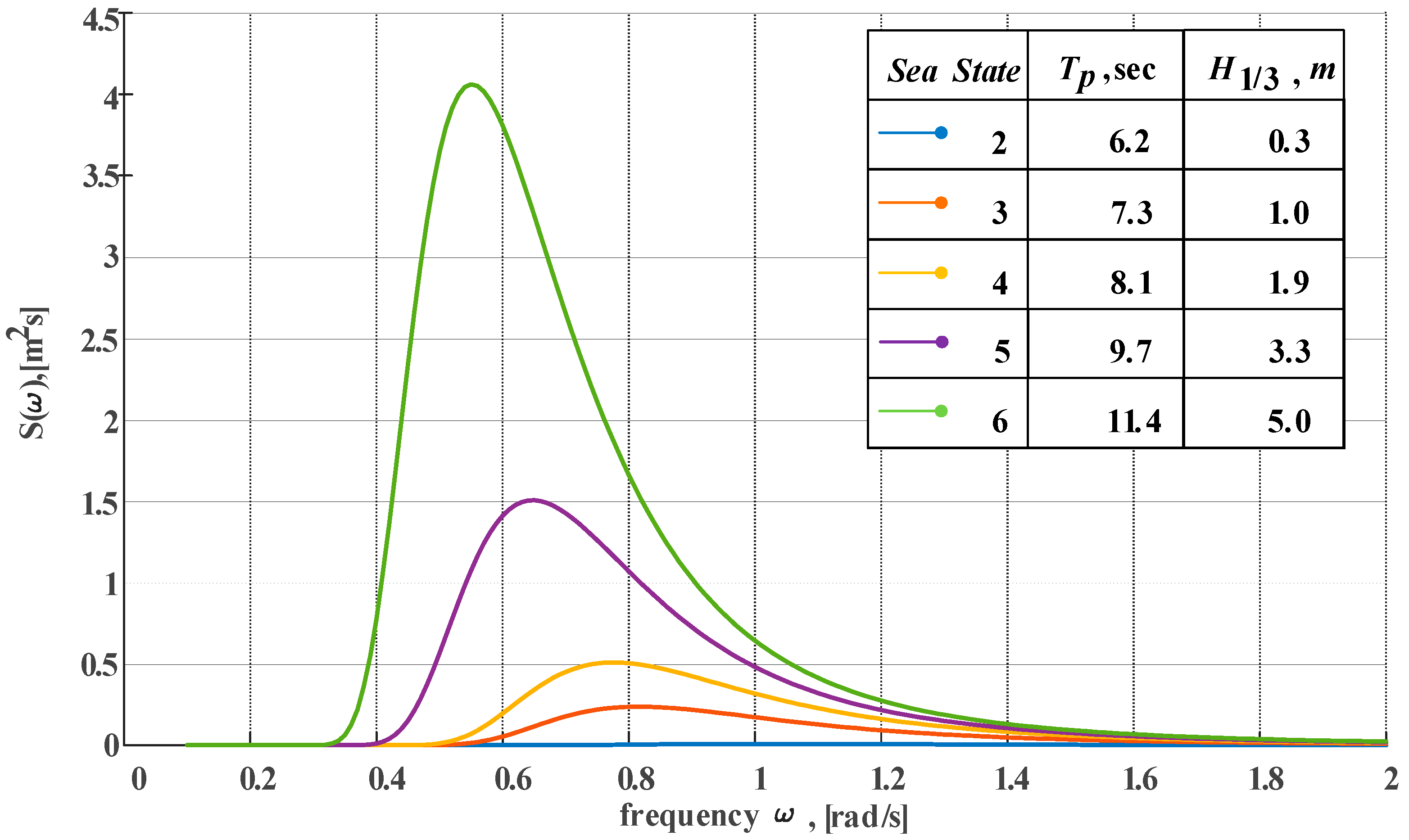
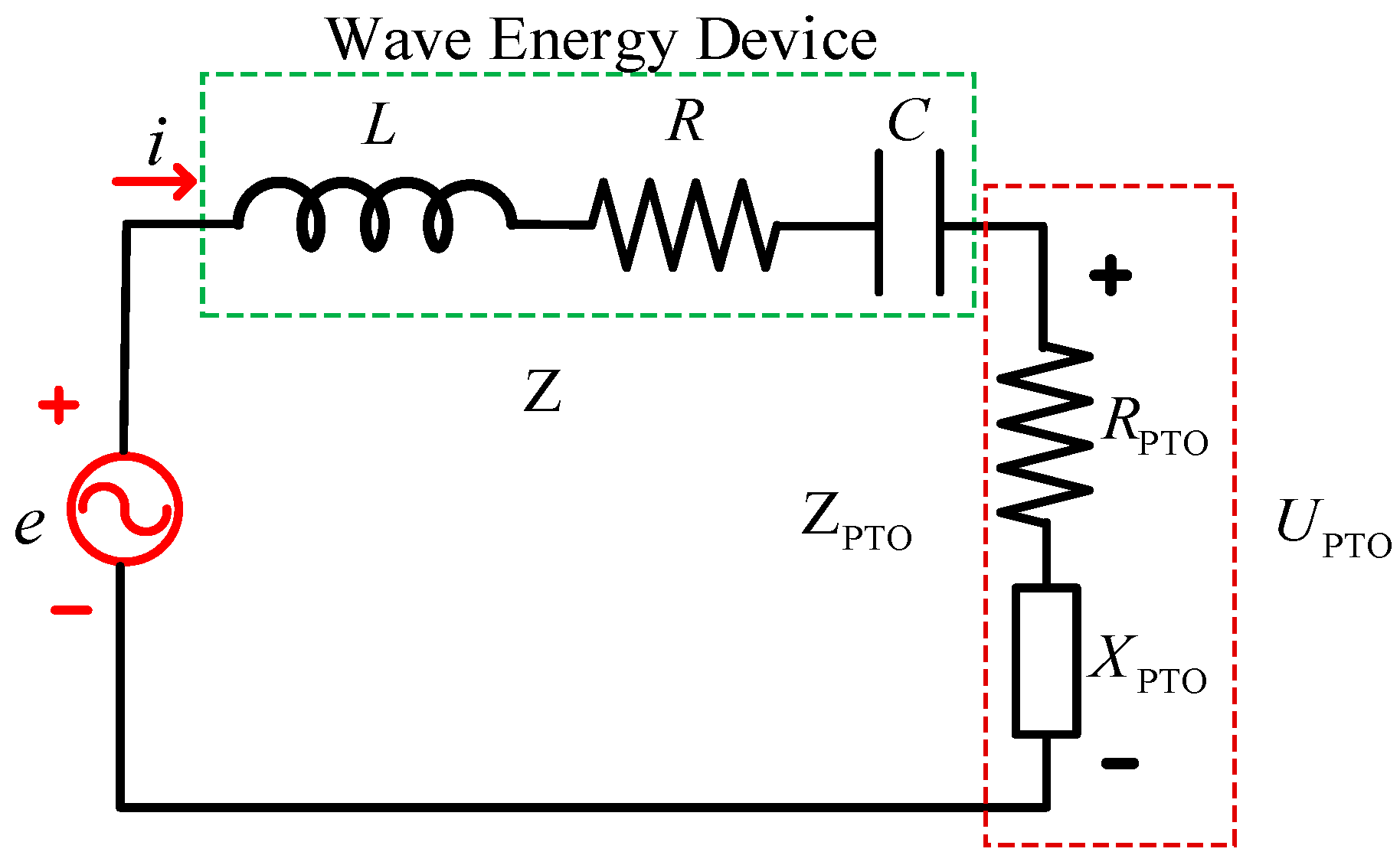
2.1. Modeling of Irregular Wave Energy and Heave-Buoy Mechanic Analysis
2.2. Analysis of Power Curve of Wave Power Generation System Under Irregular Wave Condition
3. FPA and Its Implementation
3.1. Flower Pollination Algorithm
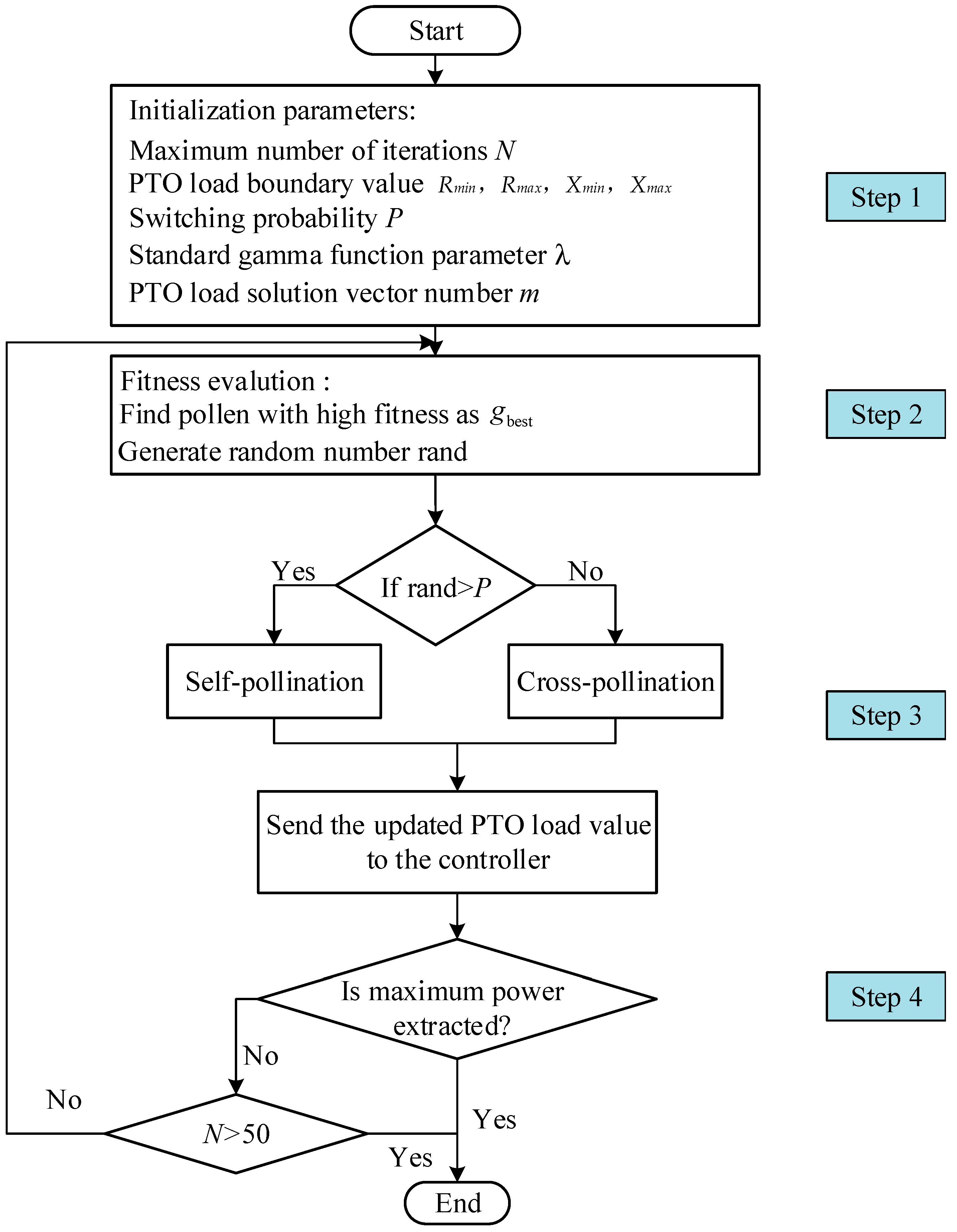
3.2. FPA Implemented for MPPT
4. Simulation Results
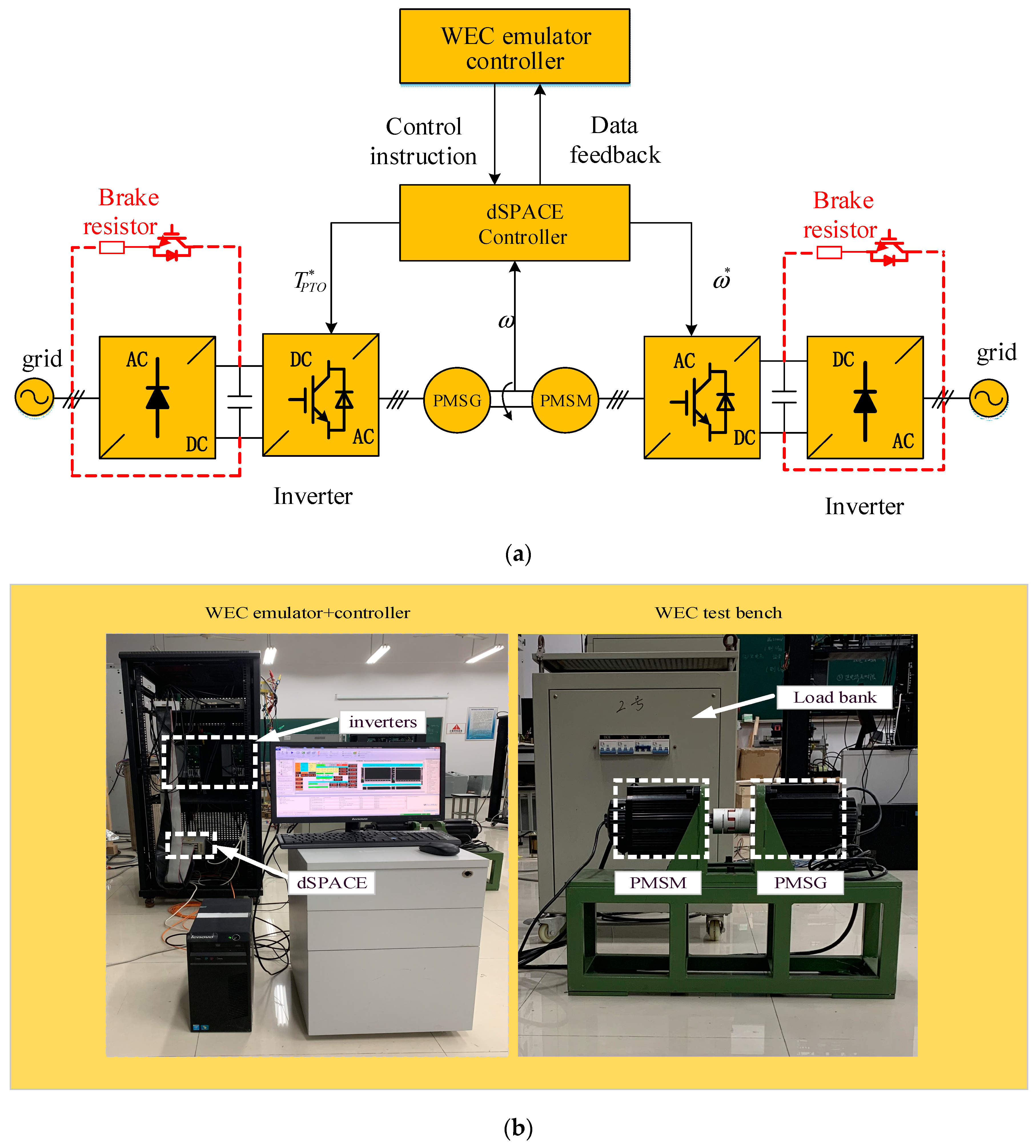
5. Experimental Result
6. Conclusions
- Similar to the hill-climbing method, the proposed method is independent of the wave period of irregular waves, the accurate knowledge of the incoming wave excitation force, and the parameters of the point-absorbing type WEC.
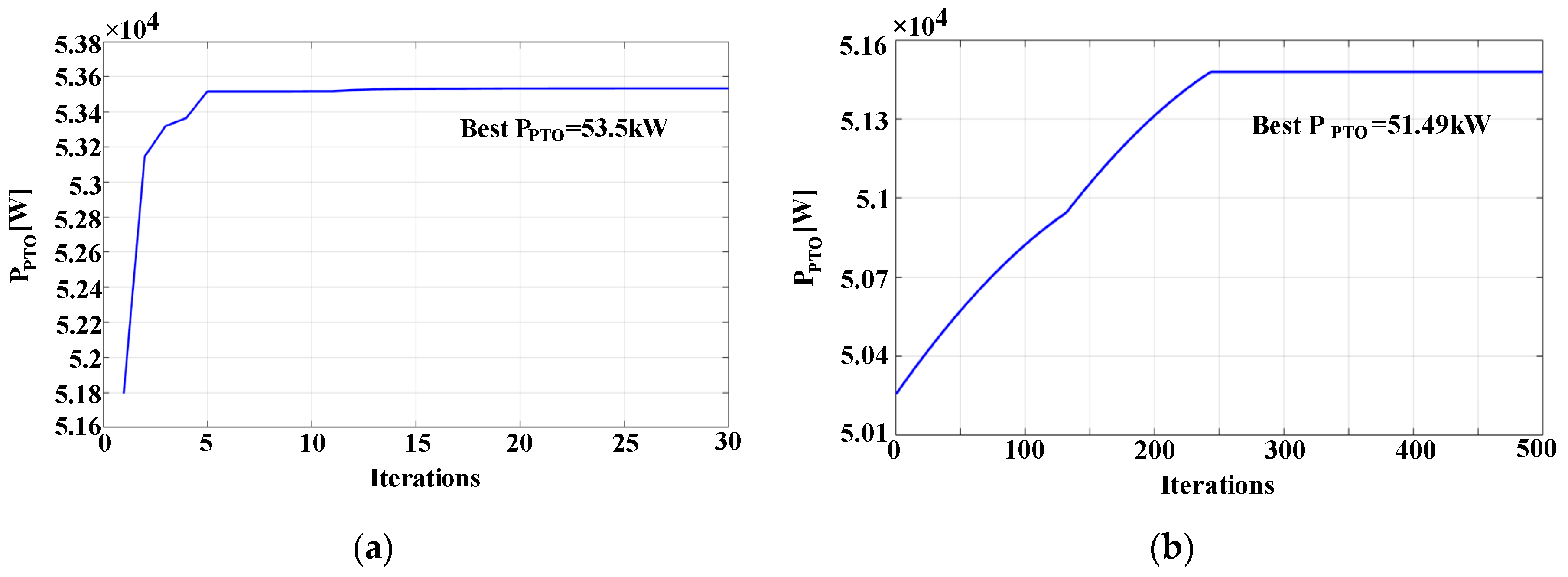
- When using the proposed MPPT control technique, a system starting from a non-optimal state can operate stably at the MPP after several iterations. Moreover, the system can rapidly respond to the MPP deviations caused by ocean wave changes and operate under the new MPP.
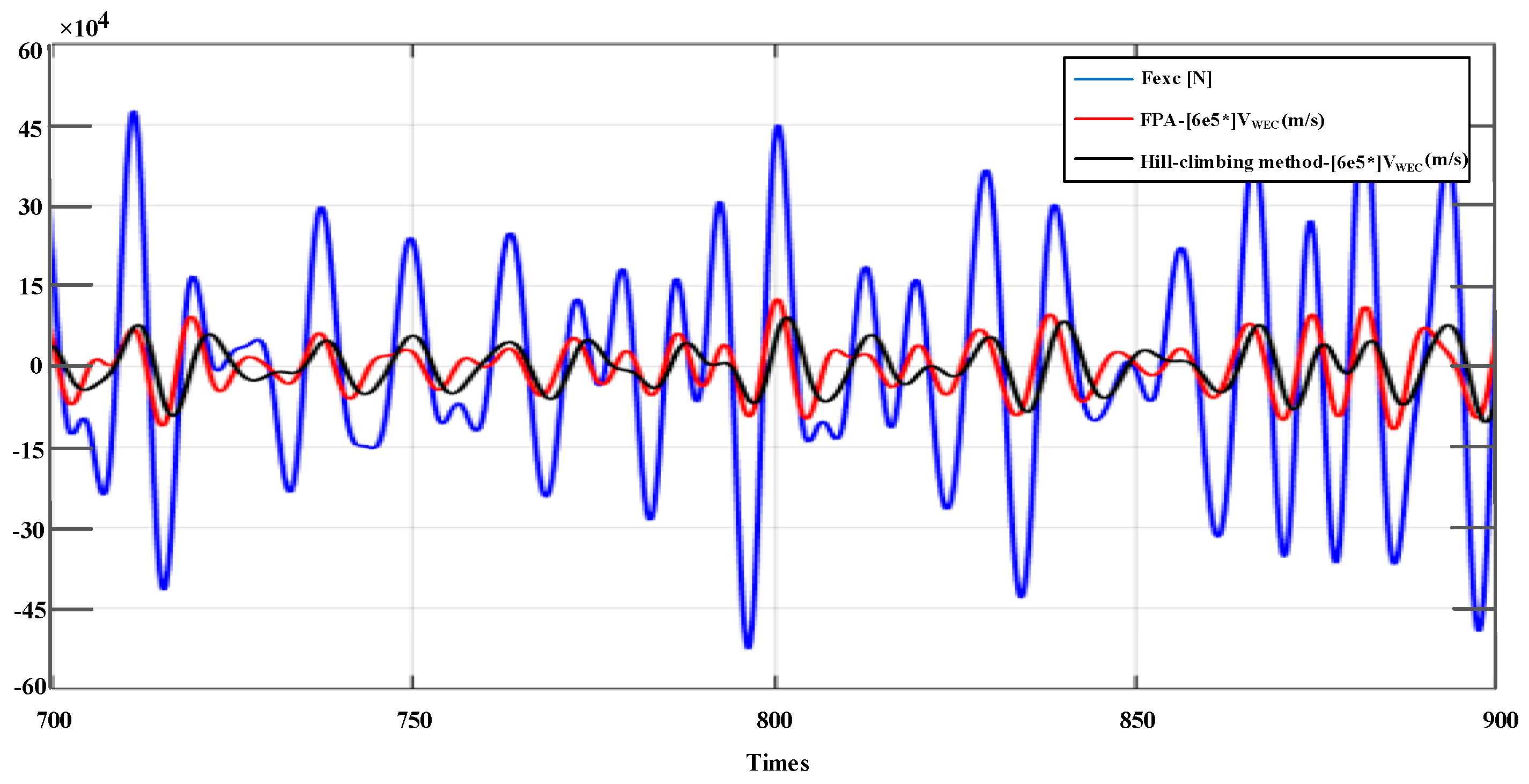
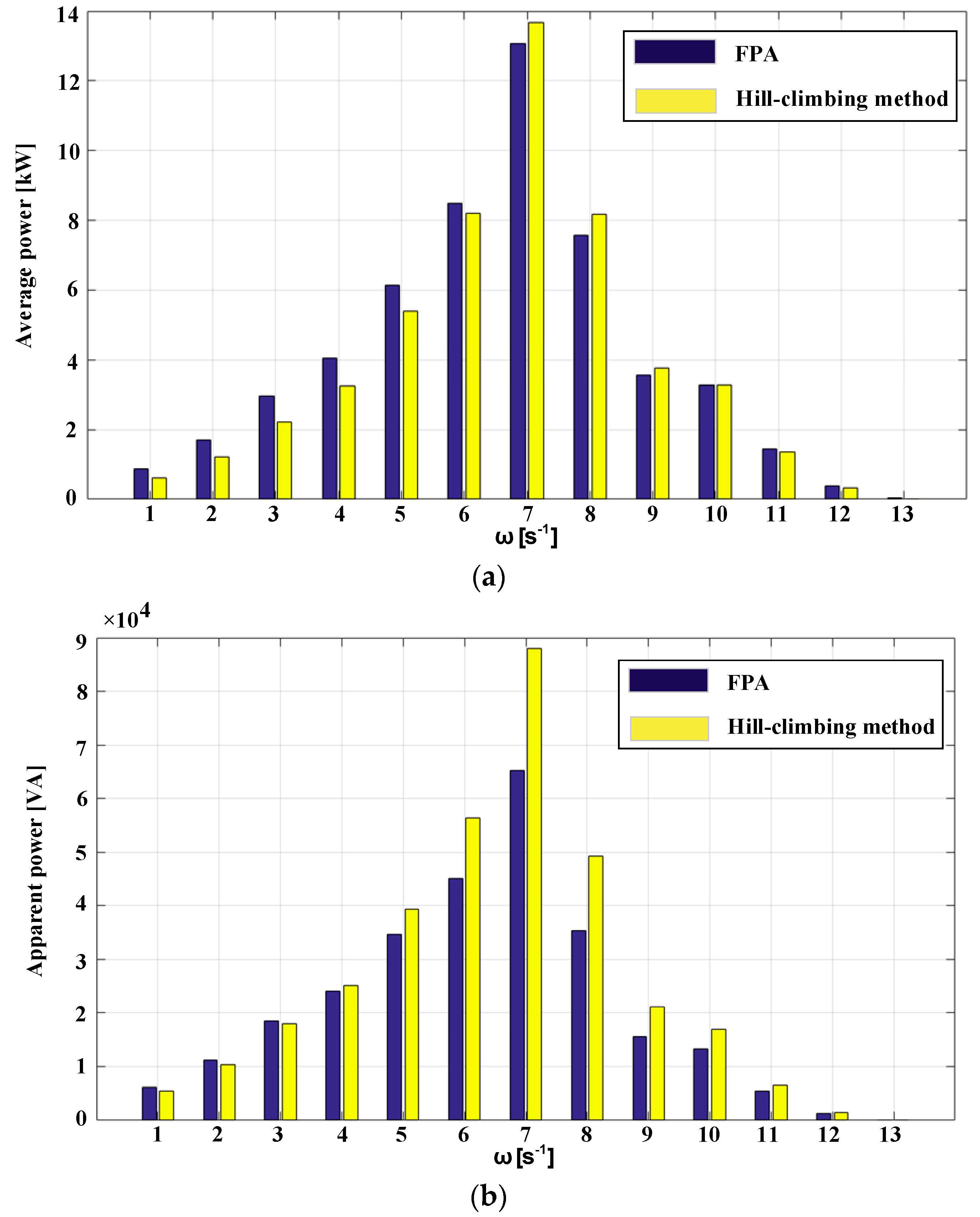
- Compared with the hill-climbing method, the proposed FPA can track the global maximum power under irregular wave conditions and produce faster convergence, better tracking, and higher efficiency. Therefore, the FPA-MPPT is a more suitable technology than the hill-climbing method for point-absorbing type WEC applications.
Author Contributions
Funding
Conflicts of Interest
References
- Khan, N.; Kalair, A.; Abas, N.; Haider, A. Review of ocean tidal, wave and thermal energy technologies. Renew. Sustain. Energy Rev. 2017, 72, 590–604. [Google Scholar] [CrossRef]
- Uihlein, A.; Magagna, D. Wave and tidal current energy—A review of the current state of research beyond technology. Renew. Sustain. Energy Rev. 2016, 58, 1070–1081. [Google Scholar] [CrossRef]
- Astariz, S.; Iglesias, G. The economics of wave energy: A review. Renew. Sustain. Energy Rev. 2015, 45, 397–408. [Google Scholar] [CrossRef]
- Zheng, C.W.; Li, C.Y.; Pan, J.; Liu, M.Y.; Xia, L.L. An overview of global ocean wind energy resource evaluations. Renew. Sustain. Energy Rev. 2016, 53, 1240–1251. [Google Scholar] [CrossRef]
- Ozkop, E.; Altas, I.H. Control, power and electrical components in wave energy conversion systems: A review of the technologies. Renew. Sustain. Energy Rev. 2017, 67, 106–115. [Google Scholar] [CrossRef]
- Gaspar, J.F.; Calvário, M.; Kamarlouei, M.; Soares, C.G. Design tradeoffs of an oil-hydraulic Power Take-Off for Wave Energy Converters. Renew. Energy 2018, 129, 245–259. [Google Scholar] [CrossRef]
- Wen, Y.; Wang, W.; Liu, H.; Mao, L.; Mi, H.; Wang, W.; Zhang, G. A Shape Optimization Method of a Specified Point Absorber Wave Energy Converter for the South China Sea. Energies 2018, 11, 2645. [Google Scholar] [CrossRef]
- Kolios, A.; Di Maio, L.F.; Wang, L.; Cui, L.; Sheng, Q. Reliability assessment of point-absorber wave energy converters. Ocean Eng. 2018, 163, 40–50. [Google Scholar] [CrossRef]
- Meng, F.; Ding, B.; Cazzolato, B.; Arjomandi, M. Modal analysis of a submerged spherical point absorber with asymmetric mass distribution. Renew. Energy. 2019, 130, 223–237. [Google Scholar] [CrossRef]
- OPT—Ocean Power Technology. Available online: http://oceanpowertechnologies.com/ (accessed on 20 December 2018).
- Wavestar. Available online: http://wavestarenergy.com/ (accessed on 20 December 2018).
- Tom, N.M.; Madhi, F.; Yeung, R.W. Balancing power absorption and structural loading for an asymmetric heave wave-energy converter in regular waves. In ASME 2016 35th International Conference on Ocean, Offshore and Arctic Engineering; American Society of Mechanical Engineers: Busan, Korea, 19–24 June 2016. [Google Scholar]
- Ringwood, J.V.; Bacelli, G.; Fusco, F. Energy-maximizing control of wave-energy converters: The development of control system technology to optimize their operation. IEEE Control Syst. 2014, 34, 30–55. [Google Scholar]
- Tedeschi, E.; Molinas, M. Tunable control strategy for wave energy converters with limited power takeoff rating. IEEE Trans. Ind. Electron. 2012, 59, 3838–3846. [Google Scholar] [CrossRef]
- Park, J.S.; Gu, B.G.; Kim, J.R.; Cho, I.H.; Jeong, I.; Lee, J. Active Phase Control for Maximum Power Point Tracking of a Linear Wave Generator. IEEE Trans. Power Electron. 2017, 32, 7651–7662. [Google Scholar] [CrossRef]
- Têtu, A.; Ferri, F.; Kramer, M.; Todalshaug, J. Physical and Mathematical Modeling of a Wave Energy Converter Equipped with a Negative Spring Mechanism for Phase Control. Energies 2018, 11, 2362. [Google Scholar] [CrossRef]
- Liu, C.; Yang, Q.; Bao, G. Latching control using optimal control method for a raft-type wave energy converter. Ships Offshore Struct. 2018, 13, 138–154. [Google Scholar] [CrossRef]
- Temiz, I.; Leijon, J.; Ekergård, B.; Boström, C. Economic aspects of latching control for a wave energy converter with a direct drive linear generator power take-off. Renew. Energy. 2018, 128, 57–67. [Google Scholar] [CrossRef]
- Cantarellas, A.M.; Remon, D.; Rodriguez, P. Adaptive vector control of wave energy converters. IEEE Trans. Ind. Appl. 2017, 53, 2382–2391. [Google Scholar] [CrossRef]
- Song, J.; Abdelkhalik, O.; Robinett, R.; Bacelli, G.; Wilson, D.; Korde, U. Multi-resonant feedback control of heave wave energy converters. Ocean Eng. 2016, 127, 269–278. [Google Scholar] [CrossRef]
- Abdelkhalik, O.; Zou, S.; Robinett, R.D.; Bacelli, G.; Wilson, D.G.; Coe, R.; Korde, U. Multiresonant Feedback Control of a Three-Degree-of-Freedom Wave Energy Converter. IEEE Trans. Sustain. Energy 2017, 8, 1518–1527. [Google Scholar] [CrossRef]
- Anderlini, E.; Forehand, D.I.; Stansell, P.; Xiao, Q.; Abusara, M. Control of a point absorber using reinforcement learning. IEEE Trans. Sustain. Energy 2016, 7, 1681–1690. [Google Scholar] [CrossRef]
- Anderlini, E.; Forehand, D.I.; Bannon, E.; Abusara, M. Control of a realistic wave energy converter model using least-squares policy iteration. IEEE Trans. Sustain. Energy 2017, 8, 1618–1628. [Google Scholar] [CrossRef]
- Xu, Q.L.; Li, Y.; Lin, Z.L. An improved boundary element method for modelling a self-reacting point absorber wave energy converter. Acta Mech. Sin. 2018, 34, 1015–1034. [Google Scholar] [CrossRef]
- Xiao, X.; Huang, X.; Kang, Q. A hill-climbing-method-based maximum-power-point-tracking strategy for direct-drive wave energy converters. IEEE Trans. Ind. Electron. 2016, 63, 257–267. [Google Scholar] [CrossRef]
- Li, X.; Wen, H.; Jiang, L.; Xiao, W.; Du, Y.; Zhao, C. An improved mppt method for pv system with fast-converging speed and zero oscillation. IEEE Trans. Ind. Appl. 2016, 52, 5051–5064. [Google Scholar] [CrossRef]
- Ghasemi, M.A.; Foroushani, H.M.; Parniani, M. Partial shading detection and smooth maximum power point tracking of PV arrays under PSC. IEEE Trans. Power Electron. 2016, 31, 6281–6292. [Google Scholar] [CrossRef]
- Chen, Z.; Yin, M.; Zou, Y.; Meng, K.; Dong, Z. Maximum wind energy extraction for variable speed wind turbines with slow dynamic behavior. IEEE Trans. Power Syst. 2017, 32, 3321–3322. [Google Scholar] [CrossRef]
- Yang, X.S.; Deb, S.; Fong, S.; He, X.; Zhao, Y. Swarm intelligence: Today and tomorrow. In Proceedings of the 2016 3rd International Conference on Soft Computing & Machine Intelligence (ISCMI), Dubai, United Arab Emirates, 23–25 November 2016; pp. 219–223. [Google Scholar]
- Li, H.; Yang, D.; Su, W.; Lü, J.; Yu, X. An Overall Distribution Particle Swarm Optimization MPPT Algorithm for Photovoltaic System Under Partial Shading. IEEE Trans. Ind. Electron. 2019, 66, 265–275. [Google Scholar] [CrossRef]
- Mohanty, S.; Subudhi, B.; Ray, P.K. A new MPPT design using grey wolf optimization technique for photovoltaic system under partial shading conditions. IEEE Trans. Sustain. Energy 2016, 7, 181–188. [Google Scholar] [CrossRef]
- Li, X.; Wen, H.; Hu, Y.; Jiang, L.; Xiao, W. Modified beta algorithm for gmppt and partial shading detection in photovoltaic systems. IEEE Trans. Power Electron. 2018, 33, 2172–2186. [Google Scholar] [CrossRef]
- Sun, Z.; Zhao, A.; Zhu, L.; Lu, K.; Wu, W.; Blaabjerg, F. Extremum-seeking Control of Wave Energy Converters using Two-objective Flower Pollination Algorithm. In Proceedings of the 2018 IEEE International Power Electronics and Application Conference and Exposition (PEAC), Shenzhen, China, 4–7 November 2018; pp. 1–5. [Google Scholar]
- Yang, X.S.; Karamanoglu, M.; He, X. Multi-objective flower algorithm for optimization. Procedia Comput. Sci. 2013, 18, 861–868. [Google Scholar] [CrossRef]
- Ram, J.P.; Rajasekar, N. A new global maximum power point tracking technique for solar photovoltaic (PV) system under partial shading conditions (PSC). Energy 2017, 118, 512–525. [Google Scholar]
- Pei, T.; Hao, X.; Gu, Q. A Novel Global Maximum Power Point Tracking Strategy Based on Modified Flower Pollination Algorithm for Photovoltaic Systems under Non-Uniform Irradiation and Temperature Conditions. Energies 2018, 11, 2708. [Google Scholar] [CrossRef]
- Michel, W.H. Sea spectra revisited. Mar Technol. 1999, 36, 211–227. [Google Scholar]
- Ansari, K.A.; Khan, N.U. Computation of environmental forces for use in offshore vessel dynamic analysis. Int. J. Energy Res. 1989, 545–553. [Google Scholar] [CrossRef]
- Taghipour, R.; Perez, T.; Moan, T. Hybrid frequency–time domain models for dynamic response analysis of marine structures. Ocean Eng. 2008, 35, 685–705. [Google Scholar] [CrossRef]
- Tedeschi, E.; Carraro, M.; Molinas, M.; Mattavelli, P. Effect of control strategies and power take-off efficiency on the power capture from sea waves. IEEE Trans. Energy Convers. 2011, 26, 1088–1098. [Google Scholar] [CrossRef]
- Yang, X.S.; Karamanoglu, M.; He, X. Flower pollination algorithm: A novel approach for multi-objective optimization. Eng. Optim. 2014, 46, 1222–1237. [Google Scholar] [CrossRef]
- Ram, J.P.; Rajasekar, N. A novel flower pollination based global maximum power point method for solar maximum power point tracking. IEEE Trans. Power Electron. 2017, 32, 8486–8499. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case Number | FPA | Hill-Climbing Method | ||
|---|---|---|---|---|
| Case 1 | 7.5 s | 1.2 m | PPTO = 53.5 kW Ratio = 11.6 | PPTO = 51.4 kW Ratio = 14.8 |
| Case 2 | 8 s | 1.6 m | PPTO = 103.7 kW Ratio = 12.1 | PPTO = 98.3 kW Ratio = 16.1 |
| Case 3 | 6.5 s | 0.8 m | PPTO = 28.7 kW Ratio = 11.3 | PPTO = 27.1 kW Ratio = 13.8 |
| Quantity | Symbol | Value | Units |
|---|---|---|---|
| Wave period | 7.5 | [s] | |
| Significant wave height | 1.2 | [m] | |
| Buoy mass | M | 267040 | [Kg] |
| Added mass | 156940 | [Kg] | |
| Spring stiffness | K | 785890 | [N/m] |
| Total buoy damping | 91520 | [Kg/s] |
| Symbol | Parameter | Value |
|---|---|---|
| np | Pole number | 8 |
| Prat | rated power | 3000 [W] |
| Vrat | rated voltage | 220 [V] |
| Irat | rated current | 12 [A] |
| nrat | rated speed | 1500 r/min |
| Trat | rated torque | 19 [] |
| Tmax | Maximum torque | 47 [] |
| fPWM | PWM frequency | 5 kHz |
| Case Number | FPA | Hill-Climbing Method | ||
|---|---|---|---|---|
| Case 1 | 7.5 s | 1.2 m | PPTO = 123.2 WRatio = 12.4 | PPTO = 117.8 WRatio = 15.4 |
| Case 2 | 8 s | 1.6 m | PPTO = 243.6 WRatio = 13.5 | PPTO = 220.6 WRatio = 17.4 |
| Case 3 | 6.5 s | 0.8 m | PPTO = 61.8 WRatio = 11.8 | PPTO = 56.4 WRatio = 14.5 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, A.; Wu, W.; Sun, Z.; Zhu, L.; Lu, K.; Chung, H.; Blaabjerg, F. A Flower Pollination Method Based Global Maximum Power Point Tracking Strategy for Point-Absorbing Type Wave Energy Converters. Energies 2019, 12, 1343. https://doi.org/10.3390/en12071343
Zhao A, Wu W, Sun Z, Zhu L, Lu K, Chung H, Blaabjerg F. A Flower Pollination Method Based Global Maximum Power Point Tracking Strategy for Point-Absorbing Type Wave Energy Converters. Energies. 2019; 12(7):1343. https://doi.org/10.3390/en12071343
Chicago/Turabian StyleZhao, Aqiang, Weimin Wu, Zuoyao Sun, Lixun Zhu, Kaiyuan Lu, Henry Chung, and Frede Blaabjerg. 2019. "A Flower Pollination Method Based Global Maximum Power Point Tracking Strategy for Point-Absorbing Type Wave Energy Converters" Energies 12, no. 7: 1343. https://doi.org/10.3390/en12071343